
地下三角形空洞地质雷达成像机理研究
2023-06-26 07:25韩佳明李冠兵高溢邈
雷达科学与技术 2023年2期
韩佳明,李冠兵,马 鑫,郑 通,黄 康,高溢邈
(西安科技大学建筑与土木工程学院,陕西西安 710054)
0 引 言
近年来,随着我国城市化建设的加快和基础建设的不断发展,城市地下空洞不论是在数量、位置,还是在形状上都发生了翻天覆地的变化[1]。城市地下空洞导致道路坍塌事故频发,严重影响人民的生命财产安全和城市的工程建设[2]。基于以上原因,在城市进行工程施工时,尤其是在地下空洞多而复杂的市区,提前进行空洞的探测和识别是非常必要的[3]。地质雷达作为一种对地下管线、空洞进行探测的重要方法,在探测过程中会常常出现扫描图像解析不明确的问题,因此对地质雷达扫描图像进行细化分析就显得尤为重要。
地质雷达(Ground Penetrating Radar,GPR)是一种利用电磁脉冲能进入地面,在通过不同介质时,会发生相应的反射,通过分析接收到的反射波波形、振幅强度等信息,然后通过软件对这些反射波进行分析,并将其转化为平面图或地图投影,判断出地下病害的位置、形状、大小、深度等情况[4-5]。国内外学者对雷达扫描图像进行了大量研究,蔡勤波等通过工程案例,分析总结了地质雷达在城市道路地下空洞探测中的应用[6];刘恩军等通过对地铁隧道衬砌病害的图像特征分析,总结了各种病害的一场特征[7];张劲松等[8]通过对不同管线进行雷达探测,对比分析各种管线雷达图像水平跨度变化特征;冯德山等[9]基于可分离小波理论,实现小波系数空间与雷达电磁场之间的转换,分析双曲线弧长等变形情况;张旭等[10]采用经过边缘检测后通过目标识别算法提取双曲线特征,提高了双曲线的完整;迟凤霞等[11]采用有限元法研究边界条件对探地雷达检测效果的影响,结果表明波长与病害尺寸相近或更小时,检测效果更为显著;Sagnard 等[12]、Ahmadi 等[13]基于模板匹配技术和LS 双曲线拟合的半自动算法来检测,定位管线双曲线算法,该算法具有良好的检测效果;Li 等[14]在双曲线模型中加入相对角度信息,有效地估算管线的半径和埋深。
综上所述,国内外学者分析地质雷达扫描图像主要是基于管线特征和双曲线模型进行研究,对扫描曲线并没有进行细化分析,而实际探测过程中,扫描曲线并不都是由双曲线组成,故迫切需要将扫描曲线进行阶段划分。本文通过分析地质雷达天线紧贴地面水平移动过程中电磁波回波接收情况,将扫描图像细分为3 个阶段,建立各阶段水平距离与回波延时之间的关系,综合分析了不同形状的三角形空洞在不同埋深条件下电磁波的传播规律与图像的成像机理,最后,结合探测实例验证了成像机理的准确性与实用性。
1 地下三角形空洞成像全过程研究
1.1 三角形空洞成像原理
地质雷达的发射天线向地下不断发射固定中心频率的电磁波信号,电磁信号遇到介电性质存在差异的界面发生反射,带有电磁信息的反射波被接收天线接收,这样的一次发射和接收过程为一道信号。然后地质雷达系统移至相邻的下一位置发射和接收形成下一道信号。通过主机将接收到的信号放大,数字化后利用成像软件就可以将无数条发射波信号转化形成三角形空洞的探测曲线[15-17]。
在实际探测中,地质雷达发射的信号在二维平面中形成一个扇形面,在三维空间中形成一个圆锥体。如图1所示,当地质雷达在位置1 时,由于雷达天线扫描区域是一个扇形面显示;当地质雷达移动至位置2时,对三角形空洞的探测就属于垂直探测,对B的探测形成的三角形空洞反射特征曲线就会在剖面图的B位置显示;同理,当地质雷达移动至位置3 时,对B点探测形成的三角形空洞反射特征曲线就会在剖面图的C位置显示[18-19]。

图1 地质雷达三角形空洞成像原理
1.2 三角形空洞成像曲线阶段划分
当雷达紧贴地面形面与三角形空洞相交于B点,从而可以探测到B点的三角形空洞,假设天线收发同置,电磁波在地下均匀介质中传播,传播路径较为简单,经过三角形空洞反射回到接收天线。
如图2所示,三角形空洞上部顶点B(C)在雷达探测线上的投影点为x0,t0为x0处对应的三角形空洞回波延时,其他雷达探测水平位置为xi,对应的三角形空洞回波延时为ti,三角形空洞底边AD上对应的高BE的长为h,底边AD长为a+b,其中以三角形空洞上部顶点竖直方向为界底边左半部分AE长为a,底边右半部分ED长为b,且a≠b,发射天线电磁波的波束角为2θ,假设介质是均匀的,因此波速v为常数。

图2 地质雷达三角形空洞扫描曲线阶段划分
根据图2所示,将地质雷达紧贴地面扫描三角形空洞形成的关于水平距离与回波延时之间关系的曲线划分为以下3个阶段:
1)第一阶段从地质雷达在X1位置发射信号在二维平面中形成的最大扇形面与三角形空洞左部顶点刚接触时的A点到地质雷达在X2位置发射信号的最大扇形面半径与三角形空洞的上部顶点在同一条直线的B点;
2)第二阶段从地质雷达在X2位置发射信号在二维平面中形成的最大扇形面半径与三角形空洞的上部顶点在同一条直线的B点到地质雷达在X3位置发射信号的最大扇形面半径与三角形空洞的上部顶点在同一条直线的C点;
3)第三阶段从地质雷达在X3位置发射信号的最大扇形面半径与三角形空洞的上部顶点在同一条直线的C点到地质雷达在X4位置发射信号的最大扇形面与三角形空洞右部顶点接触时的D点。
1.3 三角形空洞成像曲线方程
1.3.1 三角形空洞成像第一阶段曲线方程
三角形空洞扫描曲线的第一阶段如图3所示。

图3 地质雷达三角形空洞第一阶段曲线形成原理图
根据三角形空洞中的直角三角形等比例关系,则有以下等式:
式中:x表示雷达运行至与三角形空洞上部顶点垂直位置时的水平距离;zi为雷达运行过程中,扫描线与三角形空洞接触时的距离;z0为雷达和三角形空洞上部顶点垂直时,扫描线与三角形空洞接触的距离。
由式(2)可知,第一阶段是以水平距离x为自变量,回波延时t为因变量的一般直线方程。
1.3.2 三角形空洞成像第二阶段曲线方程
由于地质雷达第二阶段扫描曲线是以三角形空洞上部顶点竖直方向为对称轴的轴对称图像,所以只需分析三角形空洞扫描曲线第二阶段对称轴左侧即可。三角形空洞扫描曲线的第二阶段对称轴左侧如图4所示。

图4 地质雷达三角形空洞第二阶段左侧曲线形成原理图
根据直角三角形的边角关系,则有以下等式:
由式(4)可知,第二阶段是以水平距离x为自变量,回波延时t为因变量的双曲线方程。其中双曲线实半轴长l1=t0,虚半轴长
1.3.3 三角形空洞成像第三阶段曲线方程
三角形空洞扫描曲线的第三阶段如图5所示。

图5 地质雷达三角形空洞第三阶段曲线形成原理图
根据三角形空洞中的直角三角形等比例关系,则有以下等式:
由式(6)可知,第三阶段是以水平距离x为自变量,回波延时t为因变量的一般直线方程。
1.4 三角形空洞曲线参数特征
以过三角形空洞上部顶点的竖直方向与雷达水平移动距离的交点为原点,以雷达天线水平移动距离为横轴,且向右为正,以电磁波回波延时为纵轴,且向下为正,建立坐标系,如图6所示。

图6 地质雷达三角形空洞扫描曲线坐标系
将式(2)、式(4)和式(6)代入雷达扫描图所处坐标系运算可知,一、三阶段雷达扫描图像为一条直线,第二阶段雷达扫描图像为双曲线。
第一阶段斜率与截距分别为
第三阶段斜率与截距分别为
在雷达扫描图所处坐标系中,根据式(7)可知,第一阶段直线斜率k<0,雷达在该阶段扫描图像为单调递减直线;根据式(8)可知,第三阶段斜率k>0,雷达在该阶段扫描图像为单调递增直线。
对式(4)中x进行求导,可得以下等式:
在雷达扫描图所处坐标系中,在第二阶段对称轴左侧时x为负值,则根据式(9)可知t'x<0;由于第二阶段雷达扫描曲线中的t'x无限趋于零,根据式(10)可知t″x>0。所以第二阶段雷达扫描图像对称轴左侧为单调递减的凹函数。根据对称性可知,第二阶段雷达扫描图像对称轴右侧为单调递增的凹函数。
2 三角形空洞雷达扫描曲线的影响分析
2.1 三角形空洞雷达扫描曲线影响参数分析
地质雷达扫描天线发射信号形成的扇形面与三角形空洞刚接触时,如图7所示。

图7 扫描曲线最大水平距离示意图
根据直角三角形△AMN和直角三角形△DOP,则有以下等式:
式中:xl为三角形空洞上部顶点竖直方向左侧雷达扫描曲线水平最大距离;xr为三角形空洞上部顶点竖直方向右侧雷达扫描曲线水平最大距离;xmax为雷达扫描曲线水平最大距离。把z0=v·代入上式,整理可得扫描曲线的水平距离最大范围为
曲线第一阶段水平距离,如图8所示。

图8 扫描曲线第一阶段水平距离示意图
根据平行四边形对边相等关系,则有以下等式:
式中xⅠ为雷达扫描曲线第一阶段水平距离。
曲线第二阶段对称轴左侧水平距离,如图9所示。

图9 扫描曲线第二阶段左侧水平距离示意图
根据直角三角形△GOB,则有以下等式:
把z0=v·t0/2 代入式(16),整理可得扫描曲线的第二阶段水平距离:
式中xⅡ为雷达扫描曲线第二阶段对称轴左侧水平距离。
曲线第三阶段水平距离,如图10所示。

图10 扫描曲线第三阶段水平距离示意图
根据平行四边形对边相等关系,则有以下等式:
式中xⅢ为雷达扫描曲线第三阶段水平距离。
根据式(15)可知,雷达扫描曲线第一阶段水平距离与三角形空洞的高和底边左半部长有关;根据式(17)可知,第二阶段水平距离与三角形空洞垂直探测时的回波延时t0有关;根据式(18)可知,第三阶段水平距离与三角形空洞的高和底边右半部长有关。
2.2 三角形空洞埋深对成像的影响分析
三角形空洞的深度位置信息具有重要的意义,三角形空洞随着深度的增加或者减小,地质雷达探测成像特征必然发生一些形态上的变化,通过对成像形态的具体变化进一步分析,以研究地质雷达针对不同深度的三角形空洞雷达图像的差异。
随着地下三角形空洞埋深的增大,代表雷达电磁波传到三角形空洞表面的时间增多,根据式(7)和式(8)可知,第一、三阶段的直线斜率与埋深无关,截距随埋深的增大而增大。
根据式(4)可知,双曲线顶点坐标为(0,t0),双曲线顶点曲率为K==1/v2t0,其中l1为双曲线实半轴长,l2为虚半轴长,随着三角形空洞埋深的增大,顶点坐标中t0值不断变大,即曲线的顶点位置不断变深,顶点曲率数值不断减小,说明曲线顶点的尖锐程度不断变小。由于曲线的曲率公式为K=,而第二阶段雷达扫描曲线中t'x都无限趋于零,所以曲线曲率近似通过来判断。根据式(10)可知,随着三角形空洞埋深的增大,||公式中分母随之增大,分子随之减小,雷达扫描曲线第二个阶段的 |t″x|值都不断减小,说明第二阶段曲线的弯曲程度逐渐变小。
根据式(14)可知,扫描曲线的最大水平距离随埋深的增大而增大。根据式(15)和式(18)可知,第一、三阶段水平距离与埋深无关。根据式(17)可知,第二阶段水平距离随埋深的增大而增大。
2.3 三角形高和底边对成像的影响分析
三角形空洞的高和底边边长同样具有重要的意义,三角形空洞随着高和底边长的增大或者减小,地质雷达探测成像特征必然发生一些形态上的变化,通过对成像形态的具体变化进一步分析,以研究地质雷达针对不同高和底边三角形空洞雷达图像的差异。
随着地下三角形空洞高和底边的增大,代表以上各公式中h、a或b的值变大。根据式(7)可知,第一阶段的直线的斜率随高和以三角形空洞上部顶点竖直方向为界的底边左半部分的长度增大而减小,截距增大。根据式(8)可知,第三阶段的直线的斜率和截距随高和底边右半部分的长度增大而增大。
随着三角形空洞高和底边长的增大,根据式(4)可知,顶点坐标中t0值保持不变,即曲线的顶点位置不变,顶点曲率数值不变,说明曲线顶点的尖锐程度不变。根据式(9)和式(10)可知,||与三角形空洞的高和底边长无关,说明曲线弯曲程度不变。综上所述,雷达扫描图的第二阶段不随三角形空洞高和底边长的增大而变化。
根据式(14)可知,曲线的最大水平距离随高或底边长的增大而增大;根据式(15)可知,第一阶段的水平距离都随高或以三角形空洞上部顶点竖直方向为界底边左半部分的长度增大而增大;根据式(17)可知,第二阶段的水平距离与高和底边长无关;根据式(18)可知,第三阶段的水平距离都随高或底边右半部分的长度增大而增大。
3 特殊三角形空洞成像规律
3.1 等腰三角形空洞雷达扫描曲线分析
当地下三角形空洞为等腰三角形时,则三角形上部顶点竖直方向为界的左部底边长a等于右部底边长b。此时,扫描曲线是以三角形空洞上部顶点竖直方向为对称轴的轴对称图像,且第三阶段与第一阶段的曲线对称分布,第二阶段曲线不变。等腰三角形空洞扫描曲线阶段划分如图11所示。

图11 地质雷达等腰三角形空洞扫描曲线阶段划分
根据式(2),则可得等腰三角形第一、三阶段的曲线方程:
在雷达扫描图所处坐标系中,斜率与截距分别为
根据式(14)可得,等腰三角形空洞扫描曲线的水平距离最大范围为
根据式(14)可得,等腰三角形空洞扫描曲线第一、三阶段的水平距离均为
根据式(18)、(19)、(20)和(21)可知,对于等腰三角形空洞,在雷达扫描图所处坐标系中,雷达的第一、三阶段扫描图像的斜率绝对值相同、截距相同。全扫描曲线为以三角形空洞上部顶点竖直方向为对称轴的轴对称图像,曲线的最大水平距离随底边长的增大而增大。
3.2 直角三角形空洞雷达扫描曲线分析
当地下三角形空洞为直角三角形时,即取三角形上部顶点竖直方向为界的底边的左半部分边长a等于0,右半部分边长不变。此时,雷达的第一阶段扫描曲线发生变化,第二、三阶段的扫描曲线不变,直角三角形空洞扫描曲线阶段划分如图12所示。

图12 地质雷达直角三角形空洞扫描曲线阶段划分
根据式(1),则可得直角三角形第一阶段的曲线方程:
在雷达扫描图所处坐标系中,其斜率与截距分别为
根据式(25)可知,直角三角形空洞第一阶段扫描曲线为一般直线方程。
根据式(14)可得,直角三角形空洞扫描曲线的水平距离最大范围为
根据式(14)可得,等腰三角形空洞扫描曲线第一阶段的水平距离为
根据式(24)、(25)、(26)和(27)可知,对于直角三角形空洞,在雷达扫描图所处坐标系中,雷达的第一阶段扫描图像为单调递减直线,且直线的斜率和第一阶段水平距离均与埋深无关。
4 探测实例
地质雷达探测工程位于西安市区某工地区域,为避免地下空洞对周围环境和施工安全造成不良影响,根据任务要求及工程特点,本次地下空洞现场实际探测工作采用GSSI 美国劳雷地质雷达,使用了其3207A 型探测天线,天线的频率采用100 MHz。
以下是测区范围内经过GSSI美国劳雷地质雷达在现场探测的不同三角形空洞的雷达扫描图,结合上文提到的扫描图像分析原理与方法,对不同三角形空洞进行对比分析。
在同一测区下,对不同埋深下的相同三角形空洞进行探测分析,雷达实测扫描图如图13、图14、图15所示,雷达理论扫描图如图16所示。

图13 1号三角形空洞地质雷达实测扫描图
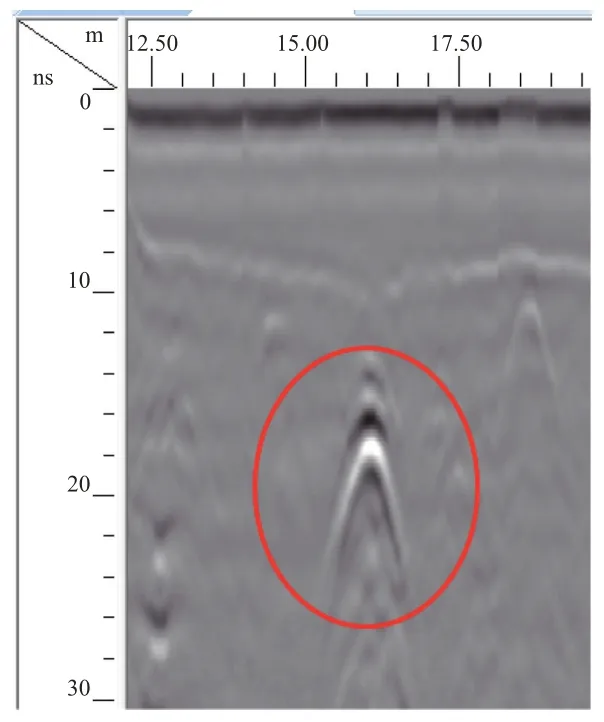
图14 2号三角形空洞地质雷达实测扫描图
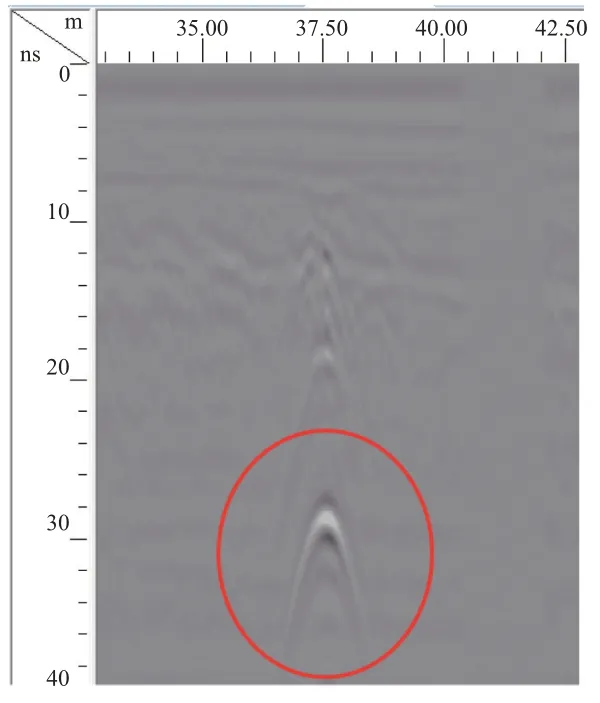
图15 3号三角形空洞地质雷达实测扫描图

图16 三角形空洞地质雷达理论扫描图
图13、图14和图15分别为测区中埋深依次增大的3 个相同三角形空洞的实测扫描图像,图16为理论扫描图像。由于3 个三角形空洞处于相同的均匀黄土介质中,波速v相同,而1号三角形空洞扫描曲线顶点处于5 ns 处,2 号三角形空洞扫描曲线顶点处于16 ns 处,3 号三角形空洞扫描曲线顶点处于28 ns 处,所以3 个三角形空洞的埋深逐渐增大。对比分析可知,相同大小的三角形空洞随着埋深增大,第二阶段扫描曲线弯曲程度逐渐变小,曲线图像趋于缓和,水平方向距离逐渐增大,而一、三阶段曲线无明显变化。实际情况吻合理论及检测结果。
在同一测区下,对同一埋深下、不同高和底边长的三角形空洞进行探测分析,雷达实测扫描图如图17、图18、图19所示,雷达理论扫描图如图20所示。

图17 1号三角形空洞地质雷达实测扫描图

图18 2号三角形空洞地质雷达实测扫描图

图19 3号三角形空洞地质雷达实测扫描图

图20 三角形空洞地质雷达理论扫描图
图17、图18和图19分别为测区中高和底边依次增大的3 个三角形空洞的实测扫描图像,图20为理论扫描图像。由于三角形空洞处于相同的黄土介质中,而且扫描曲线顶点都处于16 ns处,所以3 个三角形空洞的埋深相同。对比分析可知,相同埋深的三角形空洞随着高和底边的增大,三角形空洞扫描曲线第一阶段斜率增大,第三阶段斜率减小,且一、三阶段水平距离增大。第二阶段曲线无变化。实际情况基本吻合理论及检测结果。
5 结束语
本文基于地质雷达波的传播规律研究地下三角形空洞的成像机理。建立以水平移动方向为横轴、回波延时为纵轴的坐标系,将雷达扫描图像划分为3 个阶段,对不同埋深、不同形状的三角形空洞成像规律进行了分析与归纳。具体结论如下:
1)在一般三角形空洞中,雷达扫描图像在第一阶段为单调递减的直线,第二阶段为关于三角形空洞上部顶点竖直方向对称的双曲线,第三阶段为单调递增的直线。
2)在一般三角形空洞中,第一阶段的直线斜率随高和底边左部长的增大而减小,截距随高和底边左部长的增大而增大;第二阶段的曲线与三角形空洞的高和底边无关;第三阶段的直线斜率和截距均随高和底边左部长或右部长的增大而增大。一、三阶段的斜率与埋深无关,截距随埋深的增大而增大;第二阶段曲线的曲率随埋深的增大而减小。
3)在一般三角形空洞中,扫描曲线的最大水平距离随三角形空洞的高和底边长以及埋深的增大而增大。其中,第一、三阶段水平距离随高和底边左部长或右部长的增大而增大,与埋深无关;第二阶段水平距离随埋深的增大而增大,与高和底边长无关。
4)在等腰三角形空洞中,雷达扫描图像为对称图形,且成像规律与一般三角形空洞结论一致。
在直角三角形空洞中,雷达扫描图像的第一阶段仍为单调递减的直线,但此时直线斜率与高和底边以及埋深无关,二、三阶段成像规律与一般三角形空洞一致。
猜你喜欢
中等数学(2021年9期)2021-11-22
电子制作(2019年15期)2019-08-27
小学生学习指导(低年级)(2018年12期)2018-12-29
山东科学(2018年6期)2018-12-20
故事作文·高年级(2017年2期)2017-03-01
火控雷达技术(2016年3期)2016-02-06
百科探秘·航空航天(2015年4期)2015-11-07
新闻传播(2015年20期)2015-07-18
世界科学(2013年11期)2013-03-11
中学生数理化·高一版(2009年6期)2009-08-31
