目标动态威胁度驱动的分布式组网相控阵雷达资源优化分配算法
2023-07-04 09:51宋晓程任海伟
雷达学报 2023年3期
宋晓程 李 陟 任海伟 易 伟*
①(北京电子工程总体研究所 北京 100854)
②(电子科技大学信息与通信工程学院 成都 611731)
1 引言
相控阵雷达即相位控制电子扫描阵列雷达,是一种通过电子方法实现天线波束指向在空间中扫描的阵列天线雷达[1]。其具有天线波束快速扫描的特点,能实现搜索、跟踪与多种雷达功能。相较于常规雷达波束扫描、目标分配、驻留时间等固定配置,其具有波束捷变能力,可以灵活地对波束和时间资源进行控制[2]。另外,由于相控阵雷达通过分时多波束的工作模式,采用搜索加跟踪(Track And Search,TAS)模式完成多目标跟踪(Multi-Target Tracking,MTT)任务,其中每个跟踪任务持续一段特定时间分配安插在搜索任务的间隔中,调整该段时间的跟踪目标和驻留时间的分配可以同时改善目标的总体跟踪精度[3–5]。
随着以电子干扰、低空入侵、反辐射导弹和隐身目标为首的“四大威胁”的出现,单个雷达已经无法满足任务需求,而组网雷达系统多视角探测目标的特点,有效提高了防空系统的“四抗”能力[6,7],获得了空间分集增益、波形分集增益、目标探测威力、目标跟踪精度等指标的显著提升[8]。但组网雷达系统相较于单基地雷达,其多节点、多资源、多维度的特性,导致其任务执行能力严重依赖于多个雷达节点的资源协同管理方式。另外,面对复杂多变的战场态势,威胁评估作为关键的数据融合、决策和推理部分,是实现资源分配的前提条件,建立合理有效的威胁评估模型对提高指挥决策效能有重要意义。组网相控阵雷达在侦查过程中,目标不仅包括战略轰炸机、战斗机、攻击卫星飞机、预警机、加油机、大型干扰飞机等,还包括不同发射阵地、打击区域、射程、速度、预警时长的各类弹道导弹[9,10]。由于目标特性、战术特点、轨道特征等方面存在差异,对雷达系统的威胁度不同,正确合理评估差异化目标,完成跟踪资源的优先级动态分配,是围绕在组网相控阵雷达系统上的又一难题。因此,急需一种在实时量化目标威胁度的基础上的行之有效的资源分配算法,以提升组网雷达系统的全局MTT能力。
不同于单基地相控阵雷达,组网相控阵雷达由于雷达节点间组织结构复杂,不仅要考虑节点的跟踪资源,还要考虑其信息融合架构,为资源管理技术提出了更大的挑战。文献[11]针对组网相控阵雷达反导场景,提出了一种目标分配联合驻留时间分配算法,通过最小化归一化贝叶斯克拉美罗界(Bayesian Cramer-Rao Lower Bound,BCRLB),有效地将每个节点的有限时间资源分配给多个目标,从而在过载情况下提高MTT性能。文献[12]针对组网相控阵雷达多目标定位应用,提出了孔径、功率和带宽资源的分配策略,该策略旨在满足给定目标定位精度的同时,通过分配一定约束下的孔径、发射功率和有效带宽,降低组网相控阵雷达的总发射功率。目前针对组网相控阵雷达的工作大多针对闭环信息处理流程,而对于组网多输入多输出(Multiple-Input Multiple-Output,MIMO)雷达系统的研究成果则扩展到信息融合架构方面。文献[13]应用集中式架构的MIMO雷达网络进行功率资源的优化分配,该架构下每个雷达节点向融合中心发送原始数据,在数据传输过程中会消耗大量的能量和带宽。同样针对集中式架构,文献[14]提出了MIMO组网雷达同时多波束(Simultaneous Multibeam,SM)工作模式下的波束选择联合功率分配问题,该算法采用统一量纲的归一化BCRLB作为目标函数,并通过引入辅助变量的方式进行优化问题求解,有效提高了雷达系统多目标跟踪性能。同样针对工作在SM模式的集中式组网MIMO雷达系统,文献[15]提出了一种自适应的时空资源与波形联合优化算法,该算法对雷达子阵列数、系统采样周期、发射能量、多波束方向矢量和发射波形等参数进行联合优化,达到了在提高整体跟踪精度的同时,最大限度地减少资源消耗的目的。文献[16]则针对频谱共存环境下的MTT资源分配问题,提出并实现了以组网雷达节点选择、发射功率和驻留时间为变量,以最小化多目标跟踪BCRLB为目标,以满足给定的组网雷达射频资源和通信基站最大可容忍干扰能量阈值为约束的联合优化算法。为了改进资源分配算法的鲁棒性,文献[17]针对多目标跟踪问题,提出一种基于服务质量框架(Quality of Service,QoS)的稳健功率分配算法,该算法构建了任务效用函数量化不同功率分配下的跟踪性能,从而解决了功率分配模型在某些资源严重缺少场景下,无法产生可行方案的缺陷。
不同于集中式组网架构,分布式组网架构中雷达节点共享本地估计信息,在保持系统鲁棒性的同时,具有显著降低通信需求的优势。同时由于网络构型组织连接去中心化的优势,该架构在无人机、航天器、舰船编队等方面有广泛的应用[18]。针对分布式MIMO雷达网络,文献[19]推导了理想检测条件下的预测条件克拉美罗下界,提出并解决了节点选择联合功率资源分配问题。在此基础上,文献[20]基于QoS准则,设计了一种基于精度的可缩放目标函数,可同时根据不同的目标优先次序保持高度的资源分配灵活性,实现了对分布式组网雷达系统的波束和发射功率联合分配。文献[21]针对分布式相控阵组网雷达的目标跟踪问题,提出了一种联合发射资源管理和波形选择策略,该策略通过联合调整若干工作参数,包括发射功率、驻留时间、波形带宽和脉冲长度,以预测BCRLB和拦截概率为性能评估尺度建立双目标优化模型,最终达到提升目标跟踪精度和低截获性能的目的。
上述研究成果为组网相控阵雷达资源分配问题奠定了坚实基础,但仍然存在一些不足之处。首先,针对多目标跟踪场景,已有研究大多集中于组网MIMO雷达,缺乏对分布式组网相控阵雷达的研究。其次,已有研究也没有考虑目标动态威胁度驱动的差异化资源分配。威胁评估作为信息融合技术中的关键决策部分,由于目标威胁评估的结果会直接影响到雷达资源控制,如何实时评估监视区域内的目标威胁度,优先控制雷达系统对威胁度更高目标分配资源进行高精度测量和准确识别,是提高多目标综合跟踪性能、实施有效拦截作战的关键因素。
本文的主要贡献是基于威胁度自适应评估的分布式组网相控阵雷达资源优化分配算法研究。首先,针对分布式组网相控阵雷达系统,提出了目标动态威胁度驱动的多目标认知跟踪闭环框架,该框架以每跟踪时刻的节点回波信号为输入,经性能评估和优化问题形成求解等环节,输出下一帧的系统资源分配方案,用于下一时刻的节点回波信号生成。其次,提出了以目标运动状态实时更新、以组网雷达为整体的综合威胁度,结合衡量单目标跟踪性能下界的BCRLB,提出了跟踪精度参考门限和贡献度根据目标威胁度实时可调的效用函数,建立了MTT场景下组网相控阵雷达的波束分配与驻留时间联合优化问题。最后,由于该问题属于混合整数非线性非凸优化问题,本文采用一种基于奖励的迭代下降搜索算法进行问题求解。仿真结果验证了提出算法在具备多目标威胁度评估能力的基础上,重点关注较高优先级目标在多个差异目标中的资源分配,从而显著提高全局多目标跟踪精度。
2 分布式组网相控阵雷达系统描述
2.1 分布式组网相控阵雷达系统资源及约束
考虑一个由N个相控阵雷达节点组成的组网雷达系统,每个相控阵雷达节点通过电子扫描产生分时多波束,对有效监视区域中的多个目标进行跟踪[5]。为了简化问题,合理假设建立如下:(1)目标总数已知,且各目标广泛地分布在组网相控阵雷达的监视区域内。(2)雷达节点在每一个扫描周期内对处在其监视区域的多个目标都各进行一次扫描。(3)每个节点由均匀天线阵构成,其阵列构型及天线孔径已知。
由于相控阵雷达在波束扫描过程中波束资源有限,只能对至多Bn个目标进行照射,可表示为
即波束分配矩阵第n行的和小于Bn。
同样,假设在同一个跟踪时刻,同一目标只能被至多Lmax个节点照射,该约束可表示为
即波束分配矩阵每一列的和小于Lmax。
组网相控阵雷达对多目标的驻留时间分配方案以矩阵形式记作
2.2 相控阵雷达节点信号模型
假设k时刻雷达节点n对目标q的发射波形为
其中,Pn为雷达节点n的发射功率,Sn(t)为雷达节点n的归一化发射信号复包络,fc为载波频率。三者均为雷达参数,假设不随时间改变以简化问题。
定义k时刻雷达节点n与目标q的距离为
其中,c表示光速。
2.3 相控阵雷达节点量测及目标运动模型
其中,系统的状态转移矩阵F具体为
其中,I是 2×2的单位矩阵,运算⊗表示Kronecker积,Ts为采样时间间隔。在式(11)中,表示过程噪声向量,服从零均值的高斯分布,其协方差为
其中,qs表示过程噪声强度。
为了简化问题,假设每个相控阵雷达节点独立工作在一定的频段,与其他雷达节点工作频段错开,由此雷达节点只接收目标反射的本雷达节点发射的回波信号,组网雷达系统工作在自发自收模式。所有雷达节点按照特定的信号处理方法,从回波信号中获取目标的径向距离和方位角信息。在不考虑虚警和漏检的影响下,k时刻雷达节点n对目标q的量测方程可表示为[5,25]
其中,diag(·)表示对角矩阵,协方差对角线元素为k时刻目标q距离和方位角的估计均方误差(Mean-Square Error,MSE)的下界[4]:
其中,βn为雷达发射信号的等效带宽;BNN为雷达接收天线的波束宽度,与接收天线的孔径有关,为已知参数。由式(18)可知,驻留时间显著影响测量误差大小,随着驻留时间的提高,对目标的量测精度得到改善。
3 分布式组网相控阵雷达闭环信息处理流程
组网相控阵系统通常广泛分布在一定的地理范围内。由于通信带宽和信息传输速率的限制,采用集中式架构将严重导致实时性的降低。因此,为了降低通信负载,同时增强跟踪闭环流程的实时性,本文考虑以分布式架构作为组网相控阵雷达的组织形式基础。同时,考虑MTT场景中,组网相控阵雷达感知目标运动状态差异,进行威胁度实时评估,以指导多目标认知跟踪闭环框架的能力生成。因此,本节将给出目标动态威胁度驱动的多目标认知跟踪闭环框架的具体流程。
为简化问题,合理假设组网雷达系统中各个雷达节点已通过搜索阶段生成目标局部航迹并进行局部量测与局部航迹数据关联[24]。在此基础上,选择某个雷达节点作为融合中心,中心将根据各节点的局部航迹完成航迹-航迹关联和航迹融合,并生成全局航迹。进而,融合中心评估全局航迹跟踪精度,结合多目标威胁度评估结果,生成组网相控阵雷达波束分配与驻留时间联合优化模型。最后,通过求解该问题得到的资源分配方案反馈回雷达节点,指导下一跟踪时刻对多目标的驻留时间分配,从而实现多目标跟踪精度评估函数的最大化。如图1所示,该闭环信息处理流程按步骤可描述为:
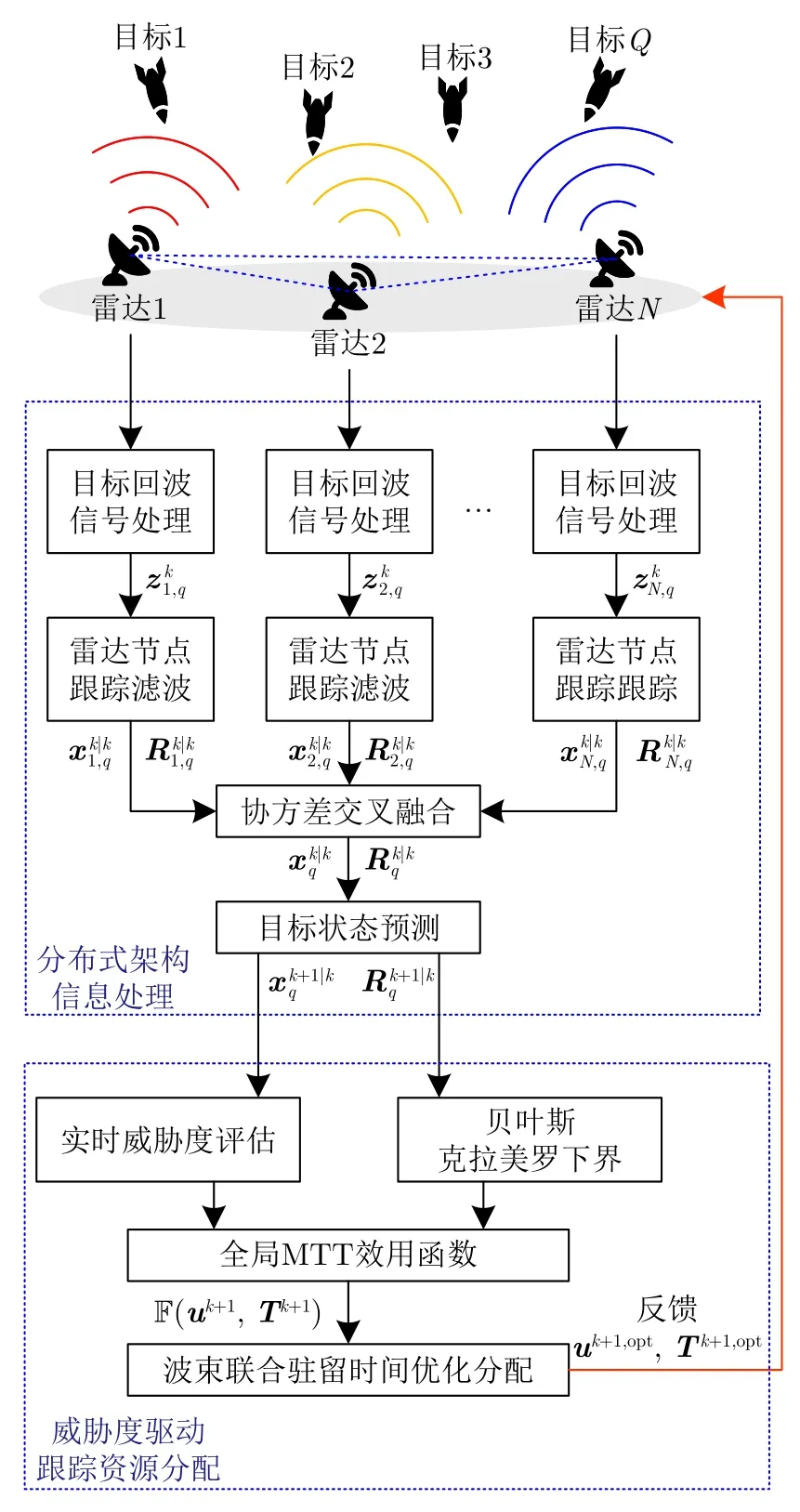
图1 组网相控阵雷达闭环信息处理流程图Fig.1 The flowchart of closed-loop information processing in netted phased array radars
步骤2 根据多目标的预测运动状态进行实时威胁度评估。从直观上看,目标距离组网雷达中心越近,接近速度越快,航向越指向组网雷达中心,该目标的威胁度越大。此外,由于目标在目标特性、战术特点方面存在差异,包括目标类型、杀伤能力、突防能力、命中精度、预警时长等,也会对威胁度评估指标产生影响[10]。
因此,假设目标q的影响威胁度评估的属性集合为
步骤3 评估分布式架构下单目标跟踪性能,并结合实时威胁度,生成综合尺度量化全局MTT性能,用于指导下一帧的系统资源调度。具体为:基于式(19)和式(20)中的预测状态向量和协方差矩阵,在融合中心计算所有目标的BCRLB。然后,利用所有目标的BCRLB,结合目标实时威胁度,衡量全局MTT性能。分布式架构下BCRLB和目标动态威胁度驱动的MTT综合尺度将在第4节详细讨论。
对于ωn如何取值的问题,一般选择使式(26)表示的目标估计状态协方差矩阵的迹最小的优化问题进行求解。而在本文中,为了保证算法的实时性,并降低算法的复杂程度,融合权重固定且已知。
4 目标动态威胁度驱动的分布式组网相控阵雷达资源优化问题建模
一般来说,用于提升性能的资源分配模型通常被表示为在系统资源受约束条件的情况下,优化某一与任务效能相关的效用函数的数学问题[34]。因此,效用函数是解决资源优化问题的关键。本文首先采用TSM函数量化多目标实时威胁度,然后推导了分布式架构下的CI融合规则的目标估计精度下界BCRLB,因为它提供了单目标跟踪性能的下界。然后,利用推导出的BCRLB,设计了一个基于跟踪精度参考门限和贡献度的效用函数,以量化MTT的全局性能,同时保持针对不同威胁度目标的资源分配的高度灵活性。
4.1 目标动态威胁度评估
TSM函数作为经典的威胁度评估函数,其综合考虑了目标运动状态对威胁水平的非线性贡献度,从数学上明确了特定时刻特定目标的战术意义[31,35]。在组网雷达多目标跟踪场景中,每个目标对于每个雷达节点都存在特定的威胁度。根据式(19)中的目标预测状态向量,则目标q到雷达节点n的相对距离、绝对速度和航向角为
TSM函数根据目标预测状态进行实时评估,定义目标q对雷达节点n的威胁度计算式为[31]
在TSM函数评估单目标对单节点的威胁度基础上,由于组网雷达系统中节点的重视程度不同,引入每个节点的保护值pn(pn∈[0,1])。该保护值由节点属性、节点价值和先验信息决定,对节点的重视程度越高,其保护值相应越大。在此基础上,单目标组网雷达威胁度可计算为
从式(30)可知,保护值与节点的重要性相关联,并作为威胁度的权重进行加权平均,进而综合单目标对组网雷达内不同重要性的若干节点,形成单目标对组网雷达的综合威胁度。至此,该综合威胁度将组网雷达看作一个整体,后续的决策和调度中将根据该综合威胁度进行。
4.2 分布式架构的克拉美罗下界推导
BCRLB的对角线元素提供了估计目标状态向量中各分量方差的下界。本文采用BCRLB矩阵估计位置分量之和的平方根作为单目标跟踪任务的性能指标,即
由式(31)、式(32)、式(34)可知,目标跟踪精度下界即克拉美罗下界,与照射该目标的各个雷达节点分配的驻留时间具有一定函数关系。通过调整当前时刻照射该目标的驻留时间,优化克拉美罗下界,降低均方误差理论上达到的最小值,可提高该单一目标的跟踪精度。
但是,考虑实际情况,雷达时间资源有限,同一时刻分配给多个目标的时间资源相互约束。一个目标驻留时间的增加会导致其他目标驻留时间的减少,而一个目标跟踪精度随之得到提升,其他目标跟踪精度却有所损失。为此,下一节主要基于目标威胁度评估,提供一种综合评估目标跟踪精度的方法,作为多目标跟踪性能尺度。
4.3 全局MTT效用函数推导
全局MTT效用函数考虑目标的相对距离、速度和航向角以量化威胁度,并合理建模为目标的跟踪精度需求及函数增长率。首先,依据多目标威胁度对多目标跟踪精度进行预设,每个目标的跟踪精度需求以向量表示为
其次,将多目标威胁度进行归一化,作为其单个目标函数的权重,以此衡量不同目标对优化函数的不同贡献度,即
从式(39)数学形式可以看出,多个目标的威胁度不同,对代价函数的变化幅度也不同,威胁度越大的目标,其具有更大的权重,进而对代价函数的贡献明显;而通过设定精度需求,可以对不同威胁度目标进行跟踪精度门限预设,在资源一定的情况下,最终结果使每个目标都能逼近其跟踪精度需求,从而保证了跟踪资源不会过分倾向于某个目标,达到全局MTT精度的提高。
此外,式(39)描述了全局MTT综合性能与波束及驻留时间分配变量的函数关系,其中各个雷达节点都提供了调整波束及驻留时间分配的自由度。通过调整各个雷达节点的系统资源分配方案,以得到最大化的全局MTT综合尺度目的。因此,本文的优化问题可表示为
具体来说,式(40)的约束来自2.1节中式(2)、式(3)、式(5)、式(6)描述的组网相控阵雷达系统的实际跟踪模式约束。第1条约束表示一个雷达节点照射的目标数量是有限的,第2条约束表示照射每个目标的雷达节点的最大数量是有限的,第3条和第4条表示每个雷达节点产生波束对目标的驻留时间由于跟踪任务而受到限制。从式(40)可以看出,制定的优化问题涉及对两个耦合变量进行优化,即用于波束分配的布尔形式变量uk和用于驻留时间分配的连续变量Tk。由于布尔形式变量的存在,式(40)描述的优化问题是一个混合整数非线性非凸优化问题[37]。通过求解该优化问题,得出最优解将指导该跟踪时刻的资源调度和量测生成。为了实时获取每个跟踪帧的资源分配方案,高效的求解算法是至关重要的。因此,第5节将给出针对此类问题的可行解决办法。
5 波束分配与驻留时间联合优化算法
对于式(40)描述的优化问题,传统的穷尽搜索方法通过枚举uk的所有组合,在实现特定组合下的驻留时间分配问题。当uk的维度很大时,会出现组合爆炸的情况,该算法比较复杂且计算量大,工程实现困难。为了解决这一问题,本文在避免进行枚举的基础上,采用文献[20]中基于奖励的迭代下降算法实现波束分配和驻留时间的优化。
首先,不同目标被波束照射与否,其代价函数的变化幅度也不同。因此,雷达节点应优先分配波束给代价函数易受影响的目标,因此首先不考虑组网雷达物理结构,每个节点均分配波束给各个目标,且平均分配驻留时间,其构建的波束分配向量uk,0和驻留时间分配向量Tk,0为
其中,1N×M表示维度N×M的全1矩阵。进而获得在此条件下每个目标的BCRLB与波束分配奖励矩阵[20]:
其次,在波束分配奖励矩阵ΔFk,0的基础上,从少到多选择值越大的若干个值,重新构造选择矩阵uk,1并置1相应位置,直到不满足布尔变量的约束条件,选择目标数量由优化函数约束决定。在此基础上,获得符合意义的可行解uk,1。
最后,由于该可行解在满足波束分配约束条件下,尽量保持最多的波束目标分配。然而,生成最多的波束目标分配并不一定确保最佳的资源分配解决方案。因此,在这一步中,我们根据更新的波束分配奖励矩阵,通过消除波束目标分配,迭代搜索更好的波束分配方案,即基于奖励的迭代下降搜索。具体算法的程序流程如图2所示。
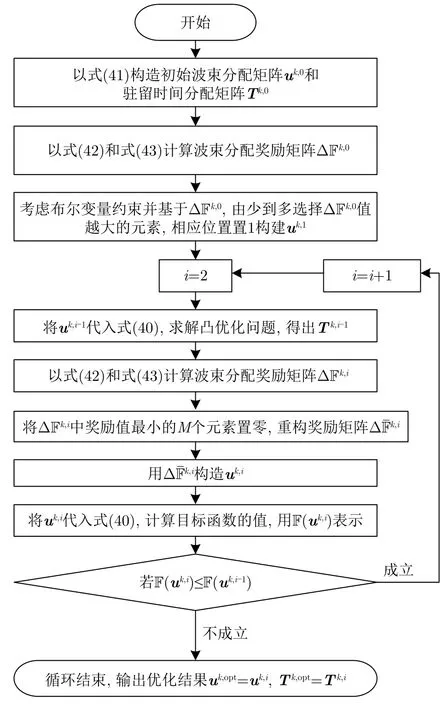
图2 基于奖励的迭代下降算法程序流程图Fig.2 The flowchart of the reward-based iterative descending approach
相比于枚举uk所有组合下最优驻留时间分配的指数级迭代求解算法,该算法中子优化问题的迭代次数,最多为 min{QLmax,NBn}次,运算量大大减小。由于此类问题属于NP-hard问题,因此找到最优解非常困难,而该算法在满足所得结果是可行解的基础上,具有更快的求解速度,并且可行解考虑了波束照射与否对代价函数提升带来的影响,是一种局部最优解,其结果符合预期。
6 仿真结果及分析
为了评估基于威胁度自适应评估目标实时威胁度驱动的组网相控阵雷达波束分配与驻留时间联合优化算法的有效性,本节用没有考虑目标威胁度的平均资源分配方法作为对比。平均资源分配方法表示了在理想资源平均的条件下,组网雷达系统的多目标跟踪精度。
6.1 基本参数设置
假设组网雷达系统由N=3部位置固定且已知的相控阵雷达节点组成,分别为 (10,5) km,(20,10)km和(30,10) km。由于第2部雷达是组网雷达的地理位置中心,其作为融合中心,具有更高的保护优先度,因此设定组网雷达各节点保护值为p1=0.2,p2=0.6,p3=0.2。各节点的波束数量Ln=3,发射信号的载频和有效带宽分别为fc=1 GHz和βn=1 MHz,发射功率Pn=1 kW,其他参数均相同。组网雷达对监视区域中的Q=4个目标进行跟踪,目标初始运动状态及其相对组网雷达中心的运动参数如表1 所示,过程噪声强度qs=10-6,RCS=2 m2。假设在跟踪时刻开始前,雷达已经完成对目标的航迹起始与数据关联,目标的航迹及其相对于组网相控阵雷达的分布如图3所示。雷达采样间隔Ts=1s,跟踪持续40帧。波束及驻留时间资源约束为:Lmax=2,Tmin=0.01Ttotal,Tmax=0.90Ttotal。蒙特卡罗次数为100次,将目标的均方根误差(Root Mean Squared Error,RMSE)定义为

表1 目标初始运动状态及其相对组网雷达中心的运动参数Tab.1 Initial motion states of targets and their motion parameters relative to the center of the netted radar system

图3 目标航迹与雷达节点位置分布图Fig.3 Deployment of targets with respect to radar nodes
在TSM 函数中取k0=80,m0=10计算威胁度,并按照威胁度合理设定跟踪精度门限为
6.2 算法性能验证
图4给出了目标运动过程中综合威胁度评估结果。相较于目标1,目标2距离组网雷达中心更近,并具有更高的威胁度;同样与目标1相比,虽然目标3距离组网雷达中心更远,但由于运动速度更大,而两个目标都近似径向靠近雷达中心运动,因此目标3威胁度更高,且威胁度增长速度更快;目标4则由于航向和组网雷达中心具有一定的夹角,导致其威胁度在所有目标中最低。可以看出,本文提出方法可以综合根据目标运动状态实时量化威胁程度。
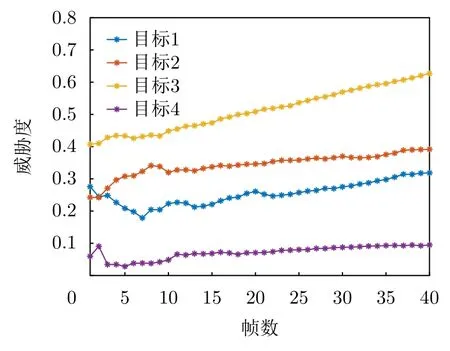
图4 目标综合威胁度评估结果Fig.4 Target threat assessment results
图5展示了组网雷达多目标跟踪的节点选择和驻留时间优化分配结果,白色部分表示该雷达节点在相应帧未发射波束照射对应目标,即=0;反之,则表示该雷达节点照射对应目标,且进行驻留时间分配,其颜色越深表示驻留时间分配比例越大。从图5可以看出,雷达节点1和节点3分配大部分时间资源给目标3,用于维持其高精度的跟踪需求;而雷达节点2主要分配时间资源给目标4,因为雷达节点1和节点3在整个跟踪时间内几乎不对目标4分配资源,图6为各目标持续时间内驻留时间分配结果,可以看出组网相控阵雷达对更高威胁度的目标3分配了大部分驻留时间。由此可知,本文提出的算法能根据目标运动状态变化、威胁度变化进行各雷达节点的波束及驻留时间的自适应分配。

图5 各雷达节点波束和驻留时间分配结果Fig.5 Beam and dwell time allocation results for each radar node

图6 各目标持续时间内驻留时间分配结果Fig.6 The sum of dwell times of targets over all frames
同时,作为本文提出算法的对比,图7和图8对比了采用本文算法和采用平均资源分配方法的各目标BCRLB和RMSE,可以看出,本文算法通过为不同威胁度的目标设定跟踪精度需求,更能衡量多目标的优先跟踪程度。在该场景中,目标2和目标3相较于目标1和目标4,具有更近的距离和运动速度,对组网雷达节点的威胁度更高,因此设定了更小的跟踪误差,而目标4由于航向角偏移组网雷达中心,因此其威胁度最低,跟踪精度需求比较宽松。随着时间的推移,目标3的威胁度逐渐上升,因此在第20帧以后,对其跟踪误差设定更小,该算法可以实时根据目标威胁度,自动调整跟踪误差需求。而从图8可以看出,平均资源分配方法下每个目标的跟踪精度只与到组网雷达的距离有关,其中距离最近的目标2具有最好的跟踪精度,但目标2相对于目标3,其威胁度不高;目标3作为威胁度最高的目标,其跟踪精度并没有获得比其他目标更好的跟踪效果。由此说明平均资源分配方法并没有综合考虑目标的威胁程度,对不同目标的差异性感知能力差,无法满足不同目标的差异化跟踪精度需求。综上所述,本文所提算法在不同威胁度的多目标跟踪场景中,具有比固定分配方法更好的跟踪精度需求感知能力和多目标综合跟踪能力。
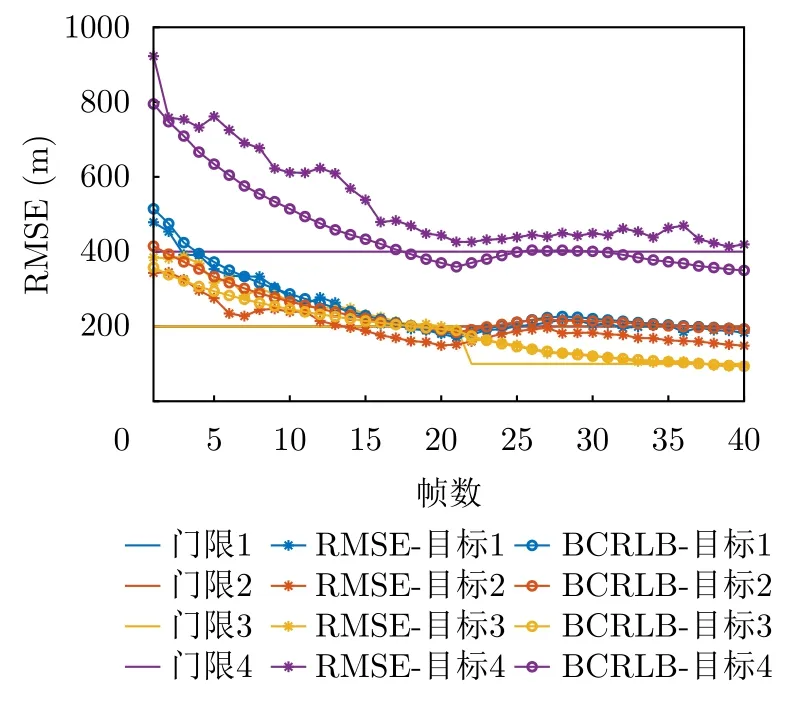
图7 采用本文算法的各目标RMSE与BCRLB对比图Fig.7 Comparison of RMSE and BCRLB using the proposed algorithm

图8 采用平均资源分配方法的各目标RMSE与BCRLB对比图Fig.8 Comparison of RMSE and BCRLB using the average resource allocation method
7 结语
本文基于分布式组网相控阵雷达系统,提出了一种目标动态威胁度驱动的波束分配与驻留时间联合优化算法。该算法根据目标实时运动状态进行威胁度评估,结合目标跟踪精度下界BCRLB,建立了一定资源约束条件下,最大化基于跟踪精度参考门限和贡献度的效用函数的优化问题。为提高模型的求解效率,采用了一种基于奖励的迭代下降算法进行求解。仿真实验表明:(1)本算法能够合理根据目标运动状态,量化目标距离、速度和航向角对威胁度的非线性影响,合理评估目标对组网雷达的威胁程度。(2)随着目标运动状态变化,目标威胁度也改变,本文提出的算法能根据对目标威胁度进行实时感知,进而指导各雷达节点的波束和驻留时间自适应分配。(3)相比于平均资源分配方法,本算法能更好地感知威胁度差异从而动态调整跟踪精度需求,资源调度方案有更强的威胁度针对性。
下一步的研究重点将考虑更多系统资源的联合优化,将问题从具体某几种资源扩展到多种组网雷达系统资源,以进一步提高优化模型的自由度,达到提高多目标跟踪性能的目的。
猜你喜欢
煤气与热力(2021年3期)2021-06-09
化工管理(2021年7期)2021-05-13
英语文摘(2020年10期)2020-11-26
通信技术(2019年3期)2019-05-31
电子制作(2019年24期)2019-02-23
测控技术(2018年7期)2018-12-09
电子测试(2018年15期)2018-09-26
电子测试(2018年6期)2018-05-09
声学与电子工程(2017年1期)2017-06-22
计算机应用(2016年10期)2017-05-12