
基于激光测距的盲区检测雷达设计
2023-07-10 13:21刘会颜灿晨杨伟
电子产品世界 2023年6期
刘会 颜灿晨 杨伟

关键词:激光测距;盲区检测;嵌入式;传感器网络节点
混合交通一直以来都是我国国省道的主要通行及货运通道,而重型大型货车因内外轮半径差较大,以及,盲区无法避免等原因,在十字路口路口等红绿灯时经常发送交通事故。为此,多地交警在十字路口规划时都喷涂上月牙形的转弯危险区,而上海交管局哪怕规定右转速度不能超过5 km/h 但仍然有“包饺子”事件发生[1]。由于很多人对于货车盲区认知不是非常清晰,这使得货车司机成为防止事故发生的核心因素。盲区雷达基本上成为了司机的第2 双眼睛,常见的有摄像头、毫米波、红外检测雷达,但当前市场上大多盲区雷达存在着:精度差、价格高、检测面局限等问题。导致货车安装量非常低,因此本文基于激光测距原理设计了一种及低成本的盲区检测雷达。
1 激光测距应用介绍
激光测距传感器是一种利用激光技术进行距离测量的传感器,根据其工作原理和应用场景不同,可以分为多种类型,以下是其中常见的几种:
时间差法激光测距传感器:该传感器通过发射激光脉冲,当激光脉冲照射到目标物体上时,返回的反射光经过接收器接收,并测量其时间差来计算距离。时间差法激光测距传感器适用于测量较短距离范围内的距离,通常精度较高[2]。
相移法激光测距传感器:该传感器采用的是激光干涉测量原理,将激光分为两束,一束经过参考光路,另一束经过目标物体后返回接收器。将两束激光叠加,通过相位差来计算目标物体的距离。相移法激光测距传感器通常适用于需要高精度测量的场景。
波前法激光测距传感器:该传感器通过测量激光波前形态的变化来计算目标物体的距离。其采用的是自适应光学技术,能够自动调整激光波前形态,适应不同距离和目标物体的形态,具有高精度和广泛的应用范围。
相位测量法激光测距传感器:该传感器通过测量激光信号的相位变化来计算目标物体的距离。相位测量法激光测距传感器通常精度高,但测量范围较窄,适用于测量较短距离的场景。
除了以上常见的几种激光测距传感器,还有一些其他类型的传感器,如三角测量法激光测距传感器、多目标激光测距传感器等,而我们的车辆盲区检测基本上就是进行车辆周边工况检测,因此我们使用时间差法激光测距传感器。
2 系统方案设计
本系统的主要功能是为了检测大货车盲区内是否有其他物品,在停车和低速时进行安全预警,提醒司机盲区内存在异物,防止安全事故发生;本系统基于VL53L1传感器设计了一套盲区检测系统。该传感器测量传感器与周围物体之间的距离,从而让系统能检测到货车盲区内的潜在危险。该系统包括可视化显示和声音警报,以提示驾驶员注意潜在的危险。
本系统采用低成本处理器ESP32,其拥有80~160 MHz的主频速率使得处理器可以轻松处理外围传感器数据,同时它支持多种低功耗模式,例如Deep Sleep、Modem Sleep等。Deep Sleep模式可以使芯片功耗降低到最低,当芯片处于Deep Sleep状态时,整个芯片会进入低功耗模式,只有RTC计时器和一些GPIO保持唤醒状态。在Deep Sleep模式下,ESP32可以达到几微安的功耗,能够延长电池寿命,从而实现长期低功耗运行。
除了低功耗,ESP32还具备丰富的外设接口,包括GPIO、SPI、UART、PWM等。GPIO可以通过软件控制,实现各种功能,例如控制LED灯、读取传感器数据等。SPI接口可以连接外部存储器或其他外设,实现数据存储或传输等功能。UART接口可以连接串口设备,例如电脑或其他微控制器,实现数据通信。PWM接口可以产生PWM信号,用于控制舵机、电机等。此外,ESP32还支持ADC、12C、SDIO等其他接口,可以满足不同应用的需求。
VL53LIX是一种激光测距传感器,采用时间差法进行距离测量,是一种时间飞行(TOF)传感器。它使用红外激光器发射激光脉冲,测量反射激光脉冲的时间差,从而计算出目标物体与传感器之间的距离[3]。VL53L1具有高精度、小尺寸、低功耗等特点,在许多应用中都有广泛的应用,例如自动驾驶、智能家居、机器人导航等。芯片内部集成了激光发射器和SPAD红外接收器,采用了第二代FightSenseTM技术,通过接收器所接收到的光子时间来计算距离,最远测量距离可达4m,适合中短距离测量的应用[4-8]。
系统使用4.3英寸LCD液晶屏作为系统显示模组,同时配备高亮LED及蜂鸣器做声光提升,根据不同距离及危险程度进行警告和提示。
2硬件系统设计
系统在硬件设计上较为简单,由于原传感器采用的IIC协议通讯速率较高,通信距离较近,在应用中大多都应用于板间通信,无法进行长距离通信,因此系统设计上利用ESP32的WiFi组网功能,实现无线节点网络间的数据传输[9-12],各节点单独使用1个处理器进行数据处理、掉线检测等功能。
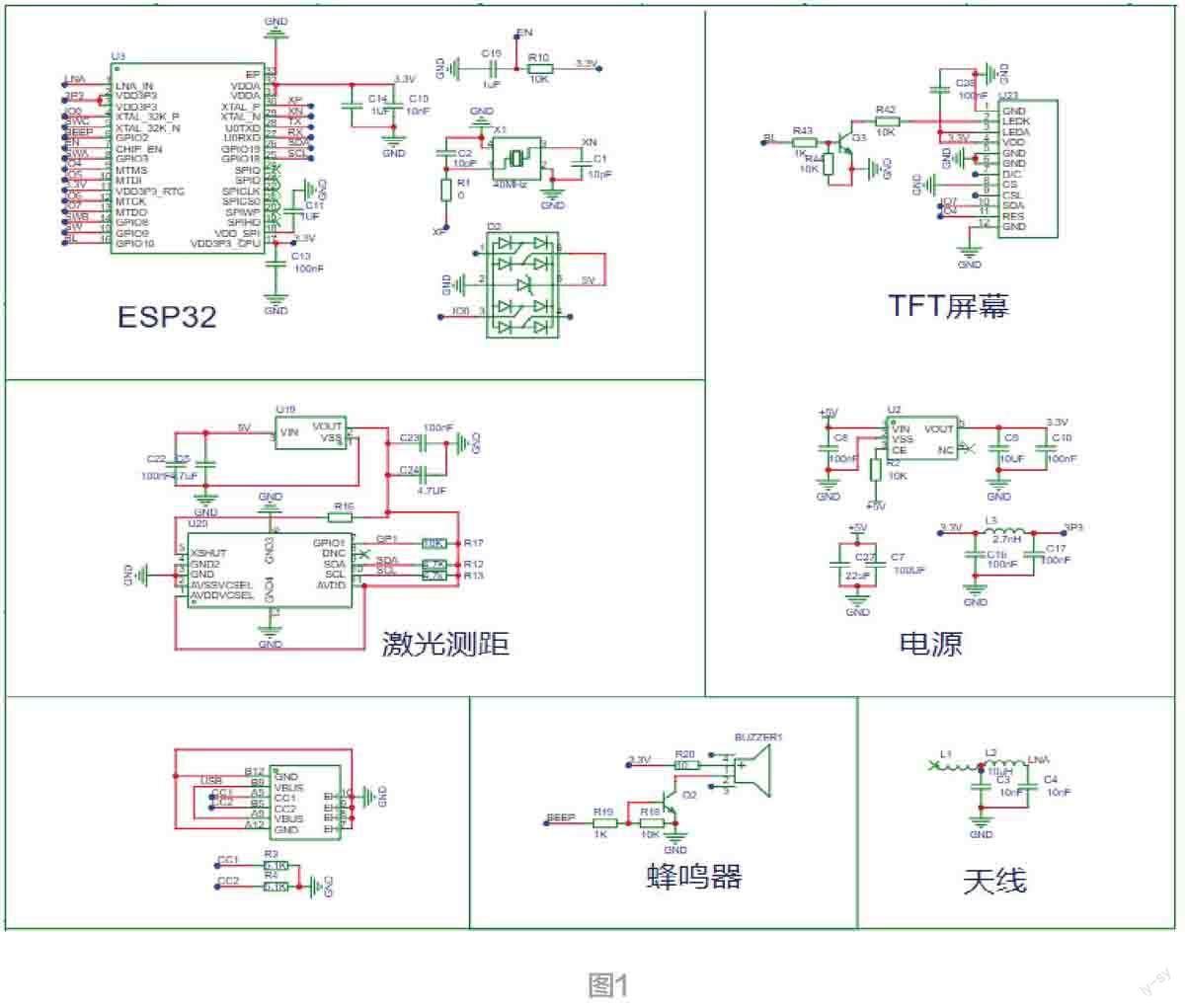
系统硬件设计除了驾驶室主机增加声光系统外,其他节点设计完全一致。硬件系统电路图如图1所示。
根据电路图进行PCB设计,PCB电路板3D图如图2所示。
3嵌软设计及外设通信
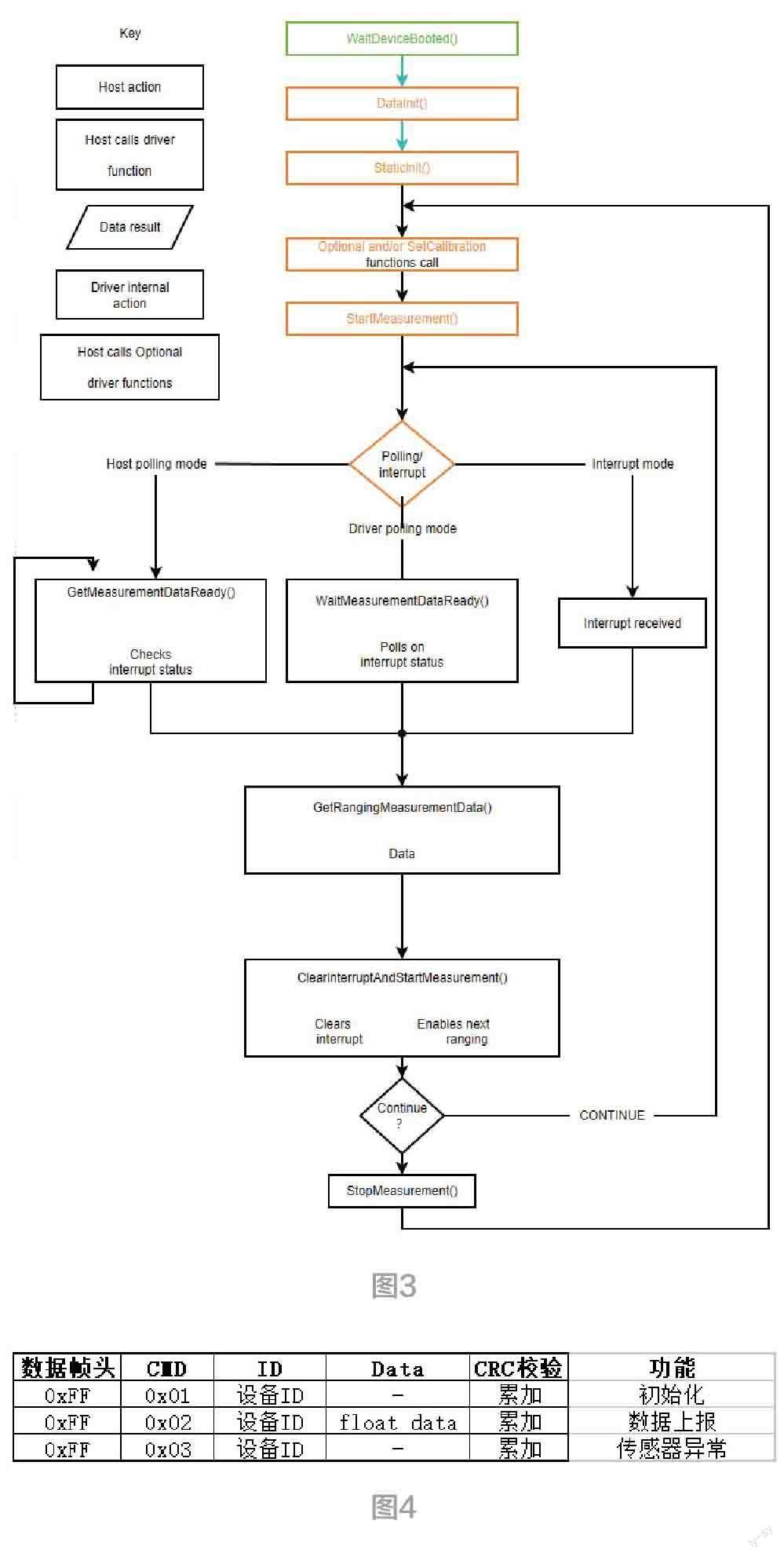
对嵌入式软件设计整体思路是通过ESP32的WIFI组网功能,将节点数据进行汇总发送到主机,根据阈值空间不同进行相应报警,同时与常规倒车雷达类似,将距离数据渲染到TFT屏幕;此外各传感器节点通过相应协议读取传感器数据,考虑到传感器数据的稳定性问题,将传感器数据进行滤波处理,保证数据的准确性后才将数据发给主机,其中激光测距流程如图3所示。
数据汇总时使用UDP协议发送数据,相应上报数据协议如图4所示。在整个嵌入式系统的设计过程中,我们还考虑了系统的低功耗和实时性问题,通过合理的系统设计和代码实现,达到了系统低功耗和高实时性的目标。
4系統测试及结语
在针对于大型货车的应用中,主要是对行人、车辆等物品进行检测,在货车盲区安装传感器节点后进行测试,每组测试100次,进行10次测试,测试结果如图5。
1)灵敏度测试:测试系统是否能够正确地检测到障碍物并发出警报。通过放置障碍物在车辆后方和侧方不同位置进行测试;
2)范围测试:测试系统的检测范围是否符合要求。可以通过将障碍物放置在系统检测范围的边缘进行测试;
3)精度测试测试系统的检测距离和位置是否准确,检测误差是否在3%以内;
4)响应时间测试:测试系统的响应时间是否符合要求。在25次采样滤波周期内(即0.5 s)发出警告提醒。
猜你喜欢
电子制作(2019年7期)2019-04-25
测控技术(2018年6期)2018-11-25
电子制作(2018年18期)2018-11-14
通信电源技术(2018年5期)2018-08-23
铁道通信信号(2018年2期)2018-04-18
制导与引信(2017年3期)2017-11-02
电镀与环保(2016年3期)2017-01-20
光学精密工程(2016年2期)2016-11-07
现代电子技术(2014年16期)2014-08-20
单片机与嵌入式系统应用(2014年9期)2014-03-11
