冲击载荷下引信MEMS后坐保险机构动态响应过程表征方法
2023-07-12 02:18秦添钰聂伟荣雷胜洪席占稳
探测与控制学报 2023年3期
秦添钰,聂伟荣,雷胜洪,曹 云,席占稳
(南京理工大学机械工程学院,江苏 南京210094)
0 引言
随着现代战争对引信要求的提高,微机电系统(micro-electro-mechanical systems,MEMS)技术因具有尺寸小、质量轻、响应快、精度高的特点被广泛应用于引信安全系统。在MEMS安全与解除隔离装置中,后坐保险机构是常用的第一道保险机构,对MEMS后坐保险机构在工作和勤务跌落载荷下的运动过程开展相应的研究,对于MEMS安解装置的设计与可靠性研究具有重要的意义。文献[1—2]对悬臂质量块式后坐保险机构进行了基于马歇特击锤系统的性能测试,通过对试验后的样机进行观察,验证了其在勤务跌落载荷下的安全性;文献[3]采用离心机对对平行于弹轴的弹簧质量块式后坐保险机构进行了实验,通过观测其最终状态得到机构解除隔离的阈值。从已有的对于后坐保险机构的研究来看,仅能获得后坐保险机构运动最终时刻的状态,无法得到机构完整的运动过程,而且由于实验条件下载荷的限制,难以对高g值工作载荷下后坐保险机构的响应过程进行研究。由于悬臂质量块式后坐保险机构在载荷加载过程中可能产生振动、接触盖板后反弹、塑性变形等情况,而这些情况影响着MEMS安解装置整体结构能否按照预期可靠解除隔离。因此,本文建立了一种基于瑞利商方法的后坐保险机构的运动位移响应模型,能够准确计算悬臂质量块式后坐保险机构的固有频率,并预测高g值工作载荷作用下机构的完整运动过程。
1 MEMS安解装置结构与工作原理
本文研究的对象为前期所设计的垂直于弹轴放置的MEMS安解装置,样机如图1所示,由框架、隔爆滑块、S形平面弹簧、后坐保险机构、离心保险机构、指令锁保险机构组成[4]。
图1 MEMS安全与解除保险装置样机Fig.1 MEMS SAD prototype
在正常发射时,后坐保险机构在后坐力的作用下向Z轴负方向运动,解除对隔爆滑块的第一道保险,这时隔爆滑块在离心力的作用下向X轴正方向运动,解除对离心卡销的锁定;随后离心保险机构在离心环境力的作用下向Y轴负方向运动,解除对隔爆滑块的第二道保险,隔爆滑块在离心力的作用下继续向X轴正方向运动,直到柔性锁臂抵住框架;当弹丸达到炮口安全距离之后,微电推销器开始作用,推动柔性锁臂向内运动,解除对隔爆滑块的最后一道保险;在离心环境力的作用下,隔爆滑块继续向X轴正方向运动,运动到位后闭锁机构闭锁,此时传爆序列对正,引信处于待发状态。
后坐保险机构作为MEMS安解装置的第一道保险机构,应当具有在正常发射时可靠解除隔离和保证勤务跌落的安全性的功能。因此,对后坐保险机构在工作载荷下的运动过程进行表征对于MEMS安解装置的设计十分重要。
2 后坐保险机构运动理论模型
本文研究的悬臂质量块式后坐保险机构可以视为一个单自由度无阻尼系统。由于惯性力远大于阻尼力,阻尼力可以忽略不计。图2(a)所示为后坐保险机构模型受载示意图,t为时间,x(t)为质量块随时间变化的位移函数,a(t)为作用在质量块上的载荷函数。图中红色圆点标示处为后坐保险机构位移测量点。运动过程中的冲击加速度可以采用半正弦加速度载荷[5]来模拟,如图2(b)所示,其中a0为加速度载荷幅值,t0为载荷脉宽。
图2 后坐保险机构模型受载示意图Fig.2 Schematic diagram of the setback latch model loaded
半正弦加速度载荷作用下后坐保险机构的响应分析分为两个阶段[1]:第一个阶段是加速度载荷作用时,即0
(1)
式(1)中,a0为加速度载荷的幅值;ω为加速度载荷的频率;t0为加速度载荷的脉宽,t0=π/ω。
因该机构可简化为单自由度无阻尼系统,其运动微分方程为
(2)
式(2)中,ωn为系统固有频率。
前期的研究中将悬臂梁的质量简化或忽略不计来简化固有频率的计算,但由于总体结构尺寸微小,悬臂梁本身的质量占系统总质量的比例较大,因此忽略悬臂梁的质量将会导致计算结果不够准确。本文采用瑞利商方法[6]来计算系统固有频率ωn,将其代入式(2)对微分方程进行求解便可获得后坐保险机构在冲击载荷下位移随时间变化的曲线。假设悬臂梁自由振动时的振动形式与在其自由端施加一个集中静载荷时的静挠度曲线相同。由材料力学可知,梁在振动过程中任一时刻的位移y(z,t)可以表示为
y(z,t)=Y(z)sin(ωnt+φ),
(3)
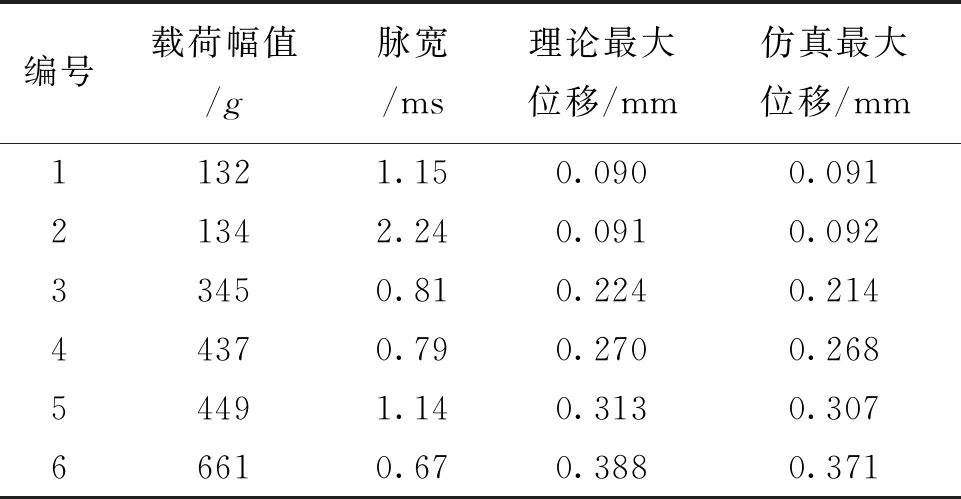
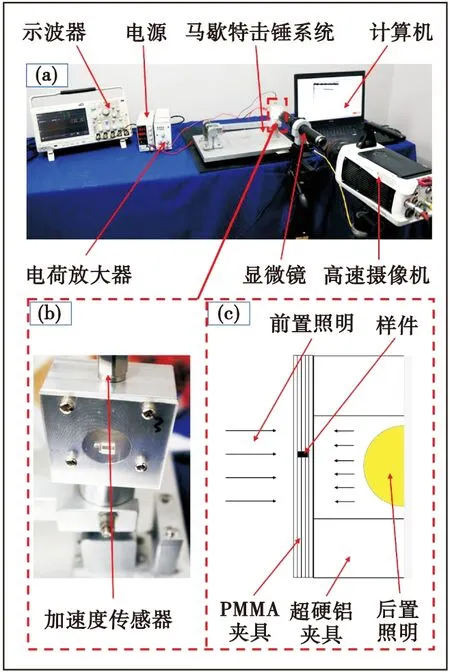
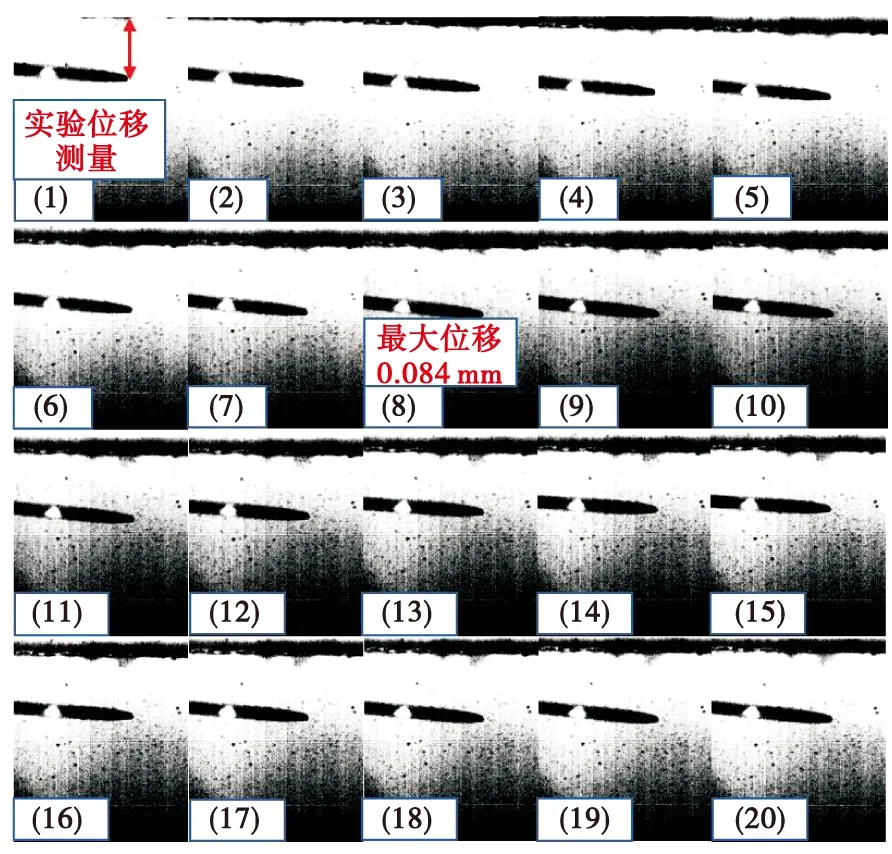
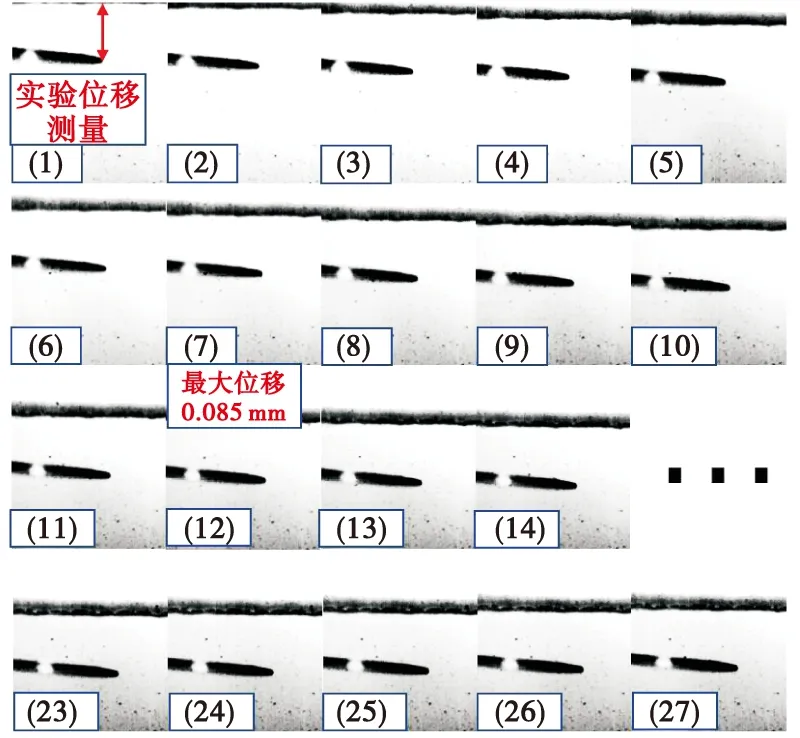
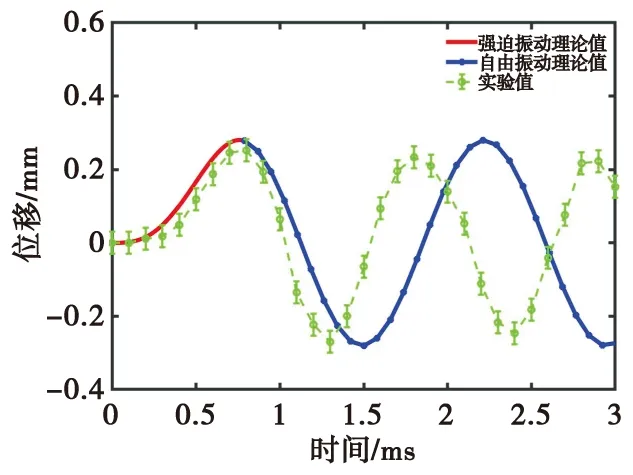
式(3)中,Y(z)=Fz2(z-3L)/6EI,为梁各点的振幅;E为材料弹性模量;I=bh3/12,为梁截面惯性矩;z为梁上某一点至梁根部的距离,其取值范围为0 在静平衡位置,梁具有最大动能Tmax如式(4)所示;在偏离平衡位置最远距离处,梁具有最大弹性势能Umax,如式(5)所示;根据机械能守恒定律,最大动能与最大势能相等,故可求得固有频率ωn的表达式,如式(6)所示。 (4) (5) (6) 系统的固有频率ωn大于载荷频率ω时,系统最大响应位移x1max出现在强迫振动阶段,其表达式为 (7) 系统的固有频率ωn小于载荷频率ω时,系统最大响应位移x2max出现在自由振动阶段,其表达式为 采集层负责收集物理环境下人体各类活动数据。采集层包括多个传感器节点,每个传感器节点由传感器、MCU、电源管理和网络组成;在本系统中主要采用心率传感器、心电电极贴、血氧采集传感器、血压传感器和红外体温传感器等,用来实时获取在押人员心率、心电、血氧和血压等重要生命体征参数。采集层节点通过各传感器感应被测人体参数和指标,并将数据上传至数据传输层。 (8) 为验证上文所提出的理论模型的合理性,更好地研究后坐保险机构的性能与动态响应过程,对后坐保险机构进行有限元仿真分析。本文采用ABAQUS有限元分析软件建立后坐保险机构的有限元模型并进行动力学分析。MEMS安全与解除隔离装置整体采用基于镍材料的UV-LIGA工艺制作,电铸镍的机械性能受电铸过程中的电流密度、电铸时间等的影响较大[7],仿真所涉及的参数如表1所示。 表1 仿真关键参数Tab.1 Simulation key parameters 运用式(6)代入表1所示的关键参数计算得到后坐保险机构固有频率ωn为3 730 rad/s,这与仿真所得的固有频率3 910 rad/s基本一致。运用最大位移计算式(7)、式(8),代入固有频率及不同载荷条件得到如表2所示的理论最大位移。 图3所示为载荷6作用下机构运动前后的位移云图。在编号为1~6的载荷作用下,仿真所得的最大位移值如表2所示。随着冲击载荷幅值的增加,后坐保险机构最大位移值逐渐增加。对比理论和仿真分析结果可知:在载荷1和2作用下,机构最大位移的仿真值大于理论值;在载荷3~6作用下,机构最大位移的理论值大于仿真值。此外,载荷1、2作用下理论和仿真值相差仅为1 μm,差距非常小;载荷6作用下差距最大,为17 μm,误差为4.4%,也控制在5%以内。这表明理论模型和仿真所得的结果具有一致性。 图3 载荷6作用下后坐保险机构位移云图Fig.3 Displacement contour plot of setback latch under load 6 表2 不同载荷下机构关键点最大位移理论值Tab.2 Theoretical maximum displacement of the mechanism under different loads 3.2.1高速摄影实验平台 运用高速摄像技术搭建的冲击环境下动态响应过程可视化实验平台如图4(a)所示[8],主要包括:马歇特击锤系统、信号采集系统和高速光学测量系统三个部分。其中,马歇特击锤系统用来产生冲击载荷,信号采集系统记录冲击过程中产生的加速度信号,高速光学测量系统用来记录后坐保险机构在冲击载荷作用下的运动过程。如图4(b)所示,后坐保险机构样件封装在透明PMMA夹具中,夹具和加速度传感器都固定在马歇特锤锤头的超硬铝夹具上,保证后坐保险机构运动方向与地面垂直。通过调整锤头的下落高度和更换缓冲垫来产生不同幅值、脉宽的正弦波,模拟不同的载荷环境。加速度传感器采集锤头下落产生的加速度信号,信号经由电荷放大器输入并记录于示波器中。显微镜通过三脚架云台固定,视场聚焦在锤头的侧面,用于将后坐保险机构放大。将高速摄像机的镜头对准显微镜目镜,调整焦距至视场能够观察到样件。 由于冲击载荷脉宽非常窄,为了捕捉机构在载荷作用下的响应过程,就要求摄像机有非常高的拍摄帧率。为了使拍摄过程中的曝光在短时间内达到摄像机传感器的要求,实验需要配置高强度的光源,因此本次实验采用顺光逆光结合的照明方法,即正面采用显微镜自带灯光进行照明,背面采用20 W的LED聚光灯珠进行逆光照明,如图4(c)所示。由于实验过程中样机在冲击载荷作用下,会与拍摄视场的侧向及轴向之间产生相对运动,故而为了满足完全捕捉到机构动态运动过程的要求,拍摄视场分辨率需较大,这一前提对高速摄影机的拍摄帧率有所限制。综合考虑以上因素,本次实验高速摄像机的拍摄帧率为10 000帧/s,即两帧图片之间的时间间隔为100 μs,图片分辨率为512×600。 图4 高速光学测量实验平台示意图Fig.4 Schematic diagram of high-speed optical measurement experiment platform 对高速摄像机拍摄到的图像进行处理,以后坐保险机构质量块的厚度作为位移测量的参考值,测量质量块末端至夹具框架的距离变化,以此计算出位移测量点的实际位移。 在幅值为132g,脉宽1.15 ms的冲击载荷作用下,机构的实验结果如图5所示。图中帧(1)—(12)显示的是0~1.2 ms时间内后坐保险机构的运动过程,由前文载荷响应分析可知,在此时间内机构发生强迫振动,从图中可以看出质量块在载荷作用方向上的位移逐渐增加。帧(13)—(20)显示的是加速度消失之后,由于冲击能量并未耗尽,机构继续自由振动。从图中可以看出,机构整体作衰减振荡,直至恢复至平衡位置。在整个运动过程中,机构在0.8 ms达到最大位移0.084 mm,在帧(8)中已经标示出来,此时冲击载荷的幅值已经由峰值逐渐下降,说明后坐保险机构的位移响应存在一定时间的滞后。 图5 幅值132 g、脉宽1.15 ms冲击载荷,拍摄帧率10 000帧/s下后坐保险机构运动过程图像Fig.5 Image of setback latch movement process at an acceleration of 132 g,pulse width 1.15 ms and a shooting speed of 10 000 fps 在第一组载荷的基础上,保持幅值相近,增加脉宽。如图6所示是幅值为134g,脉宽2.24 ms的冲击载荷作用下的实验结果。后坐保险机构的运动过程与上一组实验相似,其最大位移为0.085 mm,略大于第一组实验中最大位移,这是由于幅值稍有增大。此外,由帧(12)可以看出,机构达到最大位移时的时间为1.2 ms,与第一组实验相比有所延迟。说明在载荷幅值相同的情况下,脉宽越大,后坐保险机构位移响应时间越长。 图6 幅值165 g、脉宽2.24 ms冲击载荷,拍摄帧率10 000帧/s下后坐保险机构运动过程图像Fig.6 Image of setback latch movement process at an acceleration of 165 g,pulse width 2.24 ms and a shooting speed of 10 000 fps 在第一组载荷的基础上,保持脉宽相同,增加幅值。如图7所示是幅值为449g,脉宽1.14 ms的冲击载荷作用下的实验结果。后坐保险机构的运动过程与第一组实验相似,同样是在帧(8)达到位移最大值,但其最大位移为0.284 mm,远大于上一组实验中最大位移值。这表明在载荷脉宽相同的情况下,机构的位移大小取决于冲击载荷的幅值大小,幅值越大,后坐保险机构位移越大。 图7 幅值449 g、脉宽1.14 ms冲击载荷,拍摄帧率10 000帧/s下后坐保险机构运动过程图像Fig.7 Image of setback latch movement process at an acceleration of 449 g,pulse width 1.14 ms and a shooting speed of 10 000 fps 3.2.3结果分析与讨论 为了更好地验证理论模型的准确性,根据3.2.2节的高速摄影实验的结果,结合理论分析,绘制同一载荷作用下后坐保险机构位移-时间曲线进行对比分析。对比结果,选取幅值437g,脉宽0.79 ms的冲击载荷,绘制后坐保险机构理论和实验位移对比图。从两条曲线可以看出,在载荷加载时间内,后坐保险机构的位移随时间增大,达到最大值后略有减小;随后载荷消失,机构进入自由振动阶段,其位移值上下波动。此外,两条曲线的趋势基本一致,分别在0.75 ms和0.79 ms达到位移最大值0.270 mm和0.258 mm,其中,在强迫振动阶段,即0~0.79 ms的时间内,两条曲线趋势一致。但是在自由振动阶段,理论值相较于实验值有一定的滞后,这可能是由于实验过程中产生的冲击载荷与理论计算时使用的标准半正弦加速度载荷有一定的偏差。 图8 437 g加速度载荷下后坐保险机构运动理论和实验对比Fig.8 Theory,simulation and experimental comparison of setback latch motion under 437 g acceleration load 经过分析可知,在低g值载荷下高速摄影实验结果与理论模型预测结果吻合较好,这表明运用理论模型来预测高g值载荷下后坐保险机构的实际运动过程具有较高的准确性,可通过理论模型对其在工作载荷和勤务跌落载荷下运动位移进行预测。 本文所设计的后坐保险机构正常发射载荷幅值为12 000g、脉宽6 ms,勤务跌落载荷幅值为15 000g、脉宽0.15 ms。将实验所得结果进行拟合并代入式(7)和式(8),可得机构实际固有频率ωn为3 812 rad/s,与理论值3 730 rad/s差距较小。进一步将实验所得固有频率代入理论模型,利用理论模型对正常发射和勤务跌落载荷作用下机构的最大位移进行计算,分别为1.43 mm和0.69 mm,而隔爆滑块的厚度为0.8 mm,故后坐保险机构能够实现对正常发射和勤务跌落环境的区分。 为更好地研究悬臂质量块式后坐保险机构的工作性能,需要表征机构在冲击载荷下的完整运动过程。本文提出一种基于瑞利商方法的后坐保险机构理论模型,该方法能够准确计算悬臂质量块式后坐保险机构的固有频率,并完整预测机构在冲击载荷作用下的位移-时间过程曲线。通过对机构进行数值仿真与高速摄影实验,将理论、仿真和实验结果曲线进行比较,分析机构在低g值冲击载荷下的完整运动过程。对比结果表明,理论模型预测结果较为准确,可以在实际载荷条件难以达到的情况下运用理论模型对机构的运动过程进行预测。该方法也为今后对后坐保险机构的设计与研究提供了一定的理论指导。
3 仿真与实验验证
3.1 仿真分析

3.2 实验验证

4 结论
猜你喜欢
大电机技术(2021年2期)2021-07-21
上海保险年鉴(2018年0期)2018-03-17
上海保险年鉴(2018年0期)2018-03-17
电子制作(2017年7期)2017-06-05
上海保险年鉴(2017年0期)2017-04-03
电测与仪表(2016年15期)2016-04-12
电源技术(2015年5期)2015-08-22
电测与仪表(2015年7期)2015-04-09
现代机械(2015年1期)2015-01-15
中国神经再生研究(英文版)(2014年23期)2014-06-01