
面向AGV垃圾分类清运车托盘检测的算法研究
2023-07-13 11:28张芷宁王昶泰
时代汽车 2023年14期
关键词:算法
张芷宁 王昶泰


摘 要:AGV即自动导引车,早在上个世纪五十年代就已经被发明出来,同时随着科技水平的不断发展和进步,自动导引车不仅已经在工业生产车间中起到了重要的作用,同时还广泛的出现了很多其他的领域,比如医院、码头和餐厅等。对于AGV是一种智能无人驾驶运输车,上位机和下位机会给AGV传送相关的指令,然后AGV会根据已经预先制定好的路线进行路線行走,最后完成相一系列的复杂动作和操作。对于AGV具有很多的特点以及优势,比如较好的柔性、较高的灵活性和比较好的可靠性,同时在维护和调试方面也非常的方便,也正是因为AGV具有以上的这些特点及优势,才可以在生产车间中快速的得到应用。
关键词:agv 垃圾分类清运 托盘检测 算法
1 引言
时代发生着前所未有的变化,最后导致越来越贵的人力成本出现,从而使得生产成本也开始了逐渐升高,目前很多人都已经非常讨厌从事既危险又复杂的工作,而AGV完全可以将其进行取代。这样一来,AGV不仅可以有效的让人力进行释放,同时还可以进行24小时连续不断工作,也就是AGV不仅可以极大的减少人力成本,同时还可以大力提高生产作业效率。
最近几年,我国的不管是劳动力成本,还是企业运营成本都开始了持续上升,以至于GDP由原来的高速增长开始变成了中高速增长。根据相关数据显示,在很多发达国家,对于每个产业的生产阶段和加工阶段所制造的产品所消耗的时间不会超过25%,也就是在产品的装卸、运输和存储过程中消耗了大量的时间。
但是最近几年,由于人们的生活条件不断提高,加快了物流行业的快速发展,同时随着互联网技术的兴起,当两者进行结合以后更加使得产业链在当初的行业限制被打破。这样一来,不仅可以针对整体的物流信息进行掌握,同时还可以有效的降低成本以及提高水平。但物流行业从流程化走向信息化最后形成智能化,AGV垃圾分类清运车可以通过其自身上的传感器感知位置,通过算法来进行各项操作的检测。将AGV垃圾分类清运车和其他的运输设备进行比较,对于AGV垃圾分类清运车的固定区域没有任何限制,也无需任何轨道或者支撑架。不管是任何场地还是空间是如何。本文针对AGV垃圾分类清运车在进行垃圾装载和卸载过程中托盘进行检测,此检测过程完全采用计算机算法进行实现。
2 研究的目标与内容
本课题是针对AGV垃圾分类清运车其垃圾托盘进行检测的算法研究,通过此研究完全可以在企业从传统模式向智能化转化过程中的所存在的调度问题以及运动控制问题进行有效解决。通过此研究可以极大的增加AGV垃圾分类清运车的生产作业效率,具体的意义有如下几点:
(1)在本文所搭建的AGV垃圾分类清运车垃圾托盘检测系统会结合多种软件,分层进行架构,条理比较清晰,具有较强的实用性。
(2)本研究分位2D托盘检测模块和3D垃圾托盘检测模块,并且使用不同的算法进行实现,从而得出每个模块的实用性。
(3)垃圾托盘检测算法的实现完全可以针对托盘上的垃圾进行检测,从而得出垃圾类型,提高生产工作效率。
(4)本课题紧密和实际生产作业进行联系,得出的垃圾检测算法完全可以应用到真实的项目当中,从而在AGV垃圾分类清运车针对垃圾托盘检测提供有效的参考。
本课题以AGV垃圾分类清运车托盘垃圾检测作为研究背景,其算法的实现分为2D垃圾检测和3D垃圾检测,以车间的实际检测作为相应的研究基础,结合理论和实际针对现有的AGV垃圾分类清运车在进行垃圾托盘检测技术的充分调研,通过和设计工作进行充分的结合,并且将此作为基础,在其基础之上设计出一种适用于实际工作所提出的垃圾托盘检测算法。将此算法应用到实际的生产作业当中可以有效的满足不同生产线,不同类型的AGV垃圾分类清运车的通用性要求。在完成算法的改进以后进行实验的搭建:
(1)AGV垃圾分类清运车垃圾托盘检测系统的总体设计,通过对真实场景的实地调研,经过需求分析和总体方案的配置,从而完成AGV垃圾分类清运车垃圾托盘检测系统的设计与实现。分别针对2D垃圾和3D垃圾进行检测的研究现状进行分析,确立AGV垃圾分类清运车垃圾托盘检测系统的总体架构。
(2)基于区域采样和加权的目标检测算法针对2D垃圾进行检测,从而经过实验进行验证此算法的可行性。
(3)确定方法,以及针对传统算法进行改进,并且进行模块的建立,从而经过实验加以进行验证。
(4)在完成整个系统的设计与实现以后,将AGV垃圾分类清运车的垃圾托盘检测算法作为基础,在此基础上结合实际情况进行实现。实现系统的垃圾检测功能模块,分别进行2D垃圾托盘的检测和3D垃圾托盘的检测。从而验证面向AGV垃圾分类清运车垃圾托盘检测算法的实用性。
3 2D目标检测的技术内容及进展
对于2D目标检测最为主要的任务就是在将预先的感兴趣的目标进行定义从而在给定的区域内进行检测,并且对于感兴趣的目标进行分类,从而以边界框进行定位。
(1)基于手工特征的目标检测算法
Viola-Jones检测器被提出用于2D目标检测,后来他们进一步改进了算法。为了解决行人检测问题,提出了方向梯度直方图特征与支持向量机分类相结合的方法。使用级联决策分类器的HOG检测器进一步提高了检测速度。基于HOG检测器,扩展了可变形部件模型。首先,将目标检测结果的整体问题转化为模块不同组件的检测问题,通过组合每个组件的检测结果获得最终检测结果。
(2)基于深度学习的目标检测算法
对于基于深度学习的目标轿车算法还可以分为两种,其中一种为基于候选区方法,另一种为端对端的回归算法。
林速等人为了解决此问题提出了Feature Pyramin Networks,使用FPN在进行小目标检测的时候以及当尺度分布比较大目标的时候会更加具有优势,针对基于候选区的目标检测框架如下图1所示:
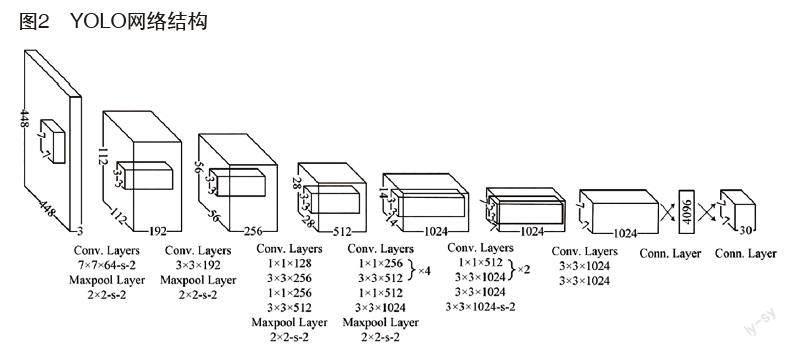
将目标检测作为回归问题,可以直接使用独立网络,然后使用卷积运算直接预测目标边界框和目标类别的位置,如图1-2所示。该算法与基于候选区域的算法进行了比较。由于该算法根本不需要计算额外的候选区域,因此在使用该方法时可以有效地提高速度。然而,YOLO也存在一些缺陷,如召回率低,这使得很难检测到小目标。YOLOv2对上述缺陷进行了相应的改进。YOLOv2将针对每个输入级别进行标准化。同时,它还使用FasterR CNN锚盒来提高平均准确库存和召回率。而针对检测速度想要快速的进行提升,雷蒙等人就针对此问题提出了YOLOv3,到目前为止,YOLOv2是检测速度最快的检测框架。
在实时检测中想要使得基于候选区的检测算法能够包吃住更高的精度,就有了SSD算法的概念,并且他们还将此算法和YOLO中的一些优点进行结合,针对一些候选框进行了生成,接下来会通过Softmax分类和边界框回归的方式针对最优目标位置进行获取。和YOLO进行比较,所不同的是YOLO只是针对最后一个特征图中进行检测,而SSD可以在多个不同尺寸的特征图上进行检测。
根据相关的数据显示,对于2D目标检测算法进行对比,其结果如下表1所示:
4 3D目标检测的技术内容及进展
在目前,二维目标检测算法已经非常成熟,无论在精度还是检测速度上都达到了比较高的水平,并在工业上得到了广泛应用。然而,在许多其他领域,2D对象检测无法应用,例如机器人导航和自动驾驶仪。原因是二维目标检测不能提供目标空间位置和目标距离,这在许多领域都非常重要。与2D对象检测相比,3D对象检测具有很大的挑战性。使用3D对象检测时,不仅应使用2D提供的RGB图像信息,还应返回3D边界框。3D边界框的生成不仅需要RGB图像信息,还需要深度信息。目前,有两种获取深度信息的方法。第一种是使用深度相机获得RGB-D;第二种方法是使用激光雷达获取点云图像。而在实际的应用中为了保证更加准确的结果,经常将多种模式进行混合从而得到的方式进行检测。
(1)基于RGB-D的3D目标检测
深度R-CNN使用深度CNN和RGB神经网络分别提取编码深度图和RGB图的特征,从而使用SVM分类器对提取的特征进行分类,最终获得目标的实例和语义分割。结构图如下图3所示:
对于RGB-D中的对象场景输入,用于3D边界框输出。该方法不仅包括三维区域推荐网络,还包括联合目标识别网络。建议3D区域网络的输入是深度图,从而可以生成3D候选区域中的所有目标。对于每个3D候选区域,深度图将输入到ORN中的3DCNN中,并提取几何特征。同时,将RGB图像输入到ORN中的2DCNN中,以提取图像特征。最后,收集上述提取的两个特征,使用Softmax分类器对候选区域中的目标进行分类,并使用回归预测3D边界框。
(2) 基于点云的目标检测
通常,基于点云的目标检测可以分为两个步骤,第一步是生成候选区域,第二步是目标分类。对于候选区域的生成,一种简单的方法是基于特定的聚合生成潜在的候选区域。通过研究移除地面,将剩余部分聚集成潜在候选区域。
首先,使用点云数据构建图,然后使用类似的最近邻聚类算法对点云进行聚类以生成候选区域。
在许多早期工作中,RGB-D图像被用作CNN三维目标检测中深度网络的输入。因为RGB-D图像也由2D图像表示,2D CNN网络可以直接在RGB-B数据中执行目标检测和其他相关任务。李林首先提出,2DCNN的输入数据也可以使用点云数据来检测3D对象。也就是说,首先,将点云數据映射到与RGBD中类似的2D深度图,从而使用全滚动网络进行目标检测。该方法最基本的方法是将3D点云数据转换为2D数据,从而使用2D目标检测网络进行检测。该方法充分利用了2DCNN的良好性能,实现相对简单。
5 总结
对于目标检测,一直以来是机器视觉领域中的研究热点。在当前,2D目标检测已经非常的成熟,因此,人们更多的将3D目标检测作为接下来重点的研究目标。特别是近几年,3D目标检测呈现出了大量算法,并且在很多领域都有应用。虽然,对于3D目标检测其发展一直以来总是得到突破,但是目前的3D目标检测还仍然处于发展的初期,还有很多的地方需要进行完善,比如对于3D目标检测算法不仅要在检测速度上有所提高,同时还要进行检测精度的提升。周围的环境不管如果进行变化,使用3D目标检测还可以进行较高可靠性的保持。与此同时,虽然目前的3D目标检测主要应用在无人汽车的自动驾驶中,但是真正的3D目标检测还可以应用在很多其他的领域,比如工业、军事和医疗,同样会产生非常重要的意义。
参考文献:
[1]周启蕾,朱国宝,萧汉梁.我国垃圾分类清运车研究的现状与未来[J].中国环保技术,2000, (2).
[2]翁心刚.2D目标检测技术的发展前景报告[C].中国区域国际物流技术高峰会论文集,2000, 6.
[3]李辉民.3D检测技术的发展与前景[J].集装箱化,2000, (4).
猜你喜欢
成都信息工程大学学报(2019年4期)2019-11-04
阅读与作文(英语初中版)(2019年8期)2019-08-27
小学生学习指导(低年级)(2018年11期)2018-12-03
传感器与微系统(2018年7期)2018-08-29
传感器与微系统(2018年7期)2018-08-29
中学生数理化·高一版(2017年9期)2017-12-19
西安工程大学学报(2016年6期)2017-01-15
现代防御技术(2016年1期)2016-06-01
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
电测与仪表(2015年24期)2015-04-09
