海流作用下潜水器运动仿真研究
2023-07-22 08:04李德军赵桥生杨申申何巍巍
舰船科学技术 2023年11期
李德军,张 伟,王 磊,2,赵桥生,杨申申,何巍巍
(1. 中国船舶科学研究中心, 深海载人装备国家重点实验室,深海技术科学太湖实验室,江苏 无锡 214082;2. 上海交通大学, 上海 200240)
0 引 言
潜水器是重要的深海装备之一,随着海洋的进一步探索,潜水器开始向深海作业型方向发展。在深海作业环境中,潜水器往往受到海流的干扰作用,海流是非定常的,其大小和方向都不能确定,研究海流作用下的深海潜水器问题对实际抗流航行作业都一定工程意义。
深海作业潜水器外形复杂,各个自由度之间耦合性较强,为描述深海潜水器运动特征,需建立其准确的六自由度方程。潜水器动力学方程是一组复杂的非线性微分方程组,目前通用的是美国海军舰船研究与发展中心于1967 年提出的潜艇六自由度运动方程[1],该标准运动方程适用于包括潜水器的水下运动物体。美国海军舰船研究与发展中心[3]于1979 年发表了修正的潜艇标准运动方程[2]。王奎民提出结合水下航行器的自身结构、环境和任务的特点,分析总结了海流等海洋环境对航行器的影响。赵桥生等以某型载人潜水器为研究对象,建立了海流作用下机械手运动时的载人潜水器动力学模型,研究了海流作用下机械手作业对潜水器运动特性与姿态的影响。胡芳琳等对无海流环境中平台扰动与有海流环境中平台扰动进行仿真分析并得出结论,当干扰外力引起平台六自由度扰动时,无海流环境下的结果与有海流情况下的相差较大。
自然界的海流非常复杂,并受各种因素影响,是时间与空间的函数,并且还有很大的随机性。深潜器在水中运动时,运动体和海流之间的作用也是复杂的,尤其对于尺寸小、低航速、外形复杂的深潜器,对海流影响较为敏感,掌握海流环境下的运动规律,可给操控策略提供建议和输入。目前还未有公开发表的海流模型[6–7],为了方便研究海流下的深海潜水器运动特性,假定海流速度为常量。
为研究海流干扰下的深海潜水器水下运动特性,本文以某深海潜水器为研究对象,建立海流作用下的六自由度运动方程,采用C++自编程序解算运动方程,对海流下得深海潜水器的回转运动进行仿真。研究结果表明,海流对横向运动影响要大于垂向运动,横向海流除了产生横向力外,还会产生转首力矩。在回转运动过程中,海流作用能够引起较大横移,垂向漂移较小;海流对回转直径影响不大。
1 深海潜水器海流干扰数学模型
研究深海潜水器的六自由度运动时,通常采用通用坐标系,建立2 个坐标系:一个定义为惯性坐标系,其固定于地球,又称地球坐标系;另一个定义为随体坐标系,其固定于潜水器,又称潜水器坐标系,2 个坐标系均采用右手系。通过惯性坐标系与潜水器坐标系的转换,可得到潜水器的空间运动学模型[8]。
惯性坐标系通过3 次欧拉角旋转变换即与随体坐标系重合,在这里,潜水器的姿态角即为欧拉角,惯性系下位置物理量3 次变换可得到随体坐标系下位置。设海流在惯性体坐标系大小为Vm, 水平流向角为 ψm,垂直流向角为 θm,海流速度在惯性坐标系下可表示为:
海流速度在潜水器坐标系下可表示为:
其中:T为潜水器坐标系到惯性坐标系的旋转变换矩阵。坐标矩阵T是正交的,即TTT=I,经整理得海流在潜水器坐标系下各向具体分量:
深海潜水器在潜水器坐标系下与海流的相对速度为:
将深海潜水器与海流的在潜水器坐标系下相对速度量va替 换原速度量v,代入潜水器空间六自由度方程组,方程具体表达式参考文献[9],即得到海流作用下的深海潜水器干扰数学模型:
2 海流干扰下的运动仿真
2.1 计算机仿真软件
计算机仿真是利用计算机工具对某个真实系统进行模拟分析的过程,通过模拟分析达到对系统的了解和分析,计算机仿真的过程一般都可由计算机高级语言、仿真语言和仿真软件来完成[9]。
本文采用C++语言自编程序解算运动方程,通过MFC 对话框实时显示潜器重要参数。在仿真过程中,通过MFC 对话框可输入干扰海流的信息,从而可模拟研究深潜器在实际航行中遇到海流的运动响应。
深海潜水器运动方程是一组由12 个方程组成的微分方程组,该运动方程的非线性、耦合性较强,加上海流作用,求解更加复杂。
通过初始状态和实时推力大小,可利用龙格库塔积分算法求解海流作用下潜器的状态未知量。
2.2 海流干扰下的直航运动仿真
为了方便研究海流下的深海潜水器运动特性,假定海流速度为常量。海流速度为0.1kn,水平流向角和垂直流向角均为45°。
航行时,推进器输入推力T=[550 N, 0, 0, 0, 0, 0]T;给定初始航速0.514 m/s,初始深度6 000 m,有海流干扰和无海流干扰的仿真结果如图1 和图2 所示。
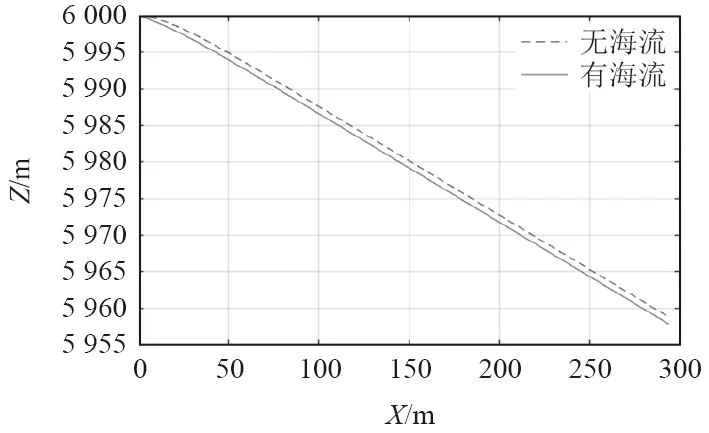
图1 直航运动垂直面投影Fig. 1 Vertical plane projection of direct navigation movement

图2 直航运动水平面投影Fig. 2 Horizontal plane projection of direct navigation movement
通过仿真结果可知,在海流水平流向角和垂直流向角相等条件下,与静水环境下相比,深潜器垂向位置最大偏差1.0 m,横向位置最大偏差2.0 m,纵向位置最大偏差0.2 m。横向漂移较大,表明海流对横向运动的偏移影响最大,且纵向位置影响最小。
深潜器外形复杂,前后不对称,横向海流除了产生横向力外,还会产生转首力矩(见图3 和图4),当海流分别是0.1 kn,0.2 kn,0.3 kn 时,由于横向海流造成的横向漂移导致航向变化,且随着海流的增大,航向和转艏水动力矩会相应增大。在实际航行中,为避免海流引起的横向漂移,深海潜水器顶流航行,可降低海流的影响。
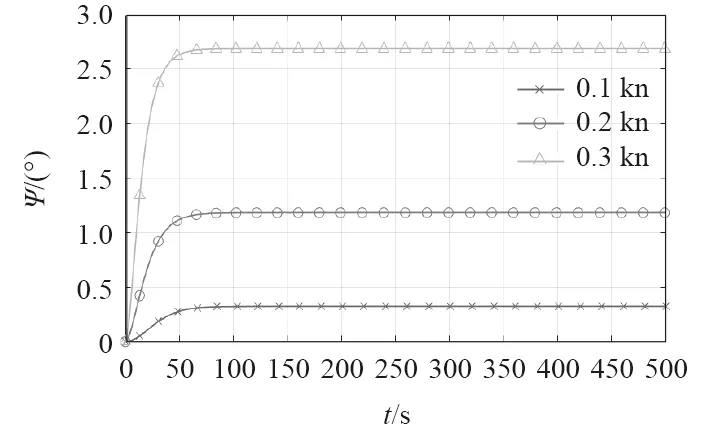
图3 不同海流下航向变化曲线Fig. 3 Course change curve under different currents

图4 不同海流下转艏水动力矩变化曲线Fig. 4 Hydrodynamic moment curve of bow turning under different currents
2.3 海流干扰下的回转运动仿真
航行时,推进器输入推力T=[550 N, 415, 0 N, 0, 0,1 176]T;初始航速0 m/s,初始深度6 000 m,潜水器进行回转运动,仿真结果如图5 所示。

图5 有/无海流下回转运动轨迹Fig. 5 Rotary motion trajectory with or without ocean current
通过仿真结果看,在无海流工况下,深潜器上下外形不对称,产生垂向水动力,导致其做空间螺旋运动。在有海流工况下,回转轨迹相对静水中产生了较大的漂移,海流对横向运动影响要大于垂向运动。
从图6 和图7 可以看出,在回转运动过程中,海流作用能够引起较大横移,垂向漂移较小;海流对回转直径影响不大,静水回转直径31.9 m,海流下的回转直径32.3 m,海流干扰下的回转直径偏大。
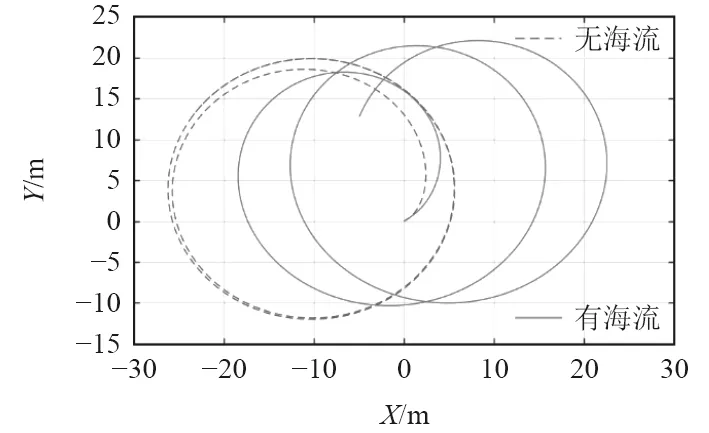
图6 回转运动水平面投影Fig. 6 Horizontal plane projection of rotary motion
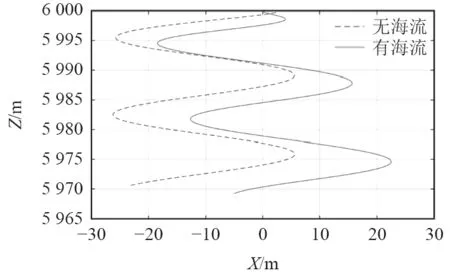
图7 回转运动垂直面投影Fig. 7 Vertical plane projection of rotary motion
3 结 语
本文以某深海潜水器为研究对象,建立海流作用下的深海潜水器运动方程。在仿真过程中,通过MFC 对话框可输入干扰海流的信息,从而可模拟研究深潜器在实际航行中遇到海流的运动响应,完成海流环境扰动下的仿真预报和运动特性分析。
本文分别对海流作用下潜器的直航运动和回转运动进行仿真,研究结果表明该仿真器能够很好模拟深海潜水器的运动。同时,反映海流对该潜水器的干扰作用。通过对海流干扰下的直航运动和回转运动进行仿真,并和无海流工况下的运动进行比较,可以看出,该深海潜水器外形复杂且航速低,对海流影响敏感,海流对横向运动影响较大,为避免横向漂移,深海潜水器顶流航行,可降低海流的影响;回转轨迹相对静水中产生了较大的横移,海流对回转直径影响不大。本文研究可为深潜器的设计及实际操纵提供参考。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
少儿科学周刊·少年版(2022年19期)2022-05-30
中国海洋大学学报(自然科学版)(2020年8期)2020-08-03
中国船检(2019年6期)2019-11-29
小哥白尼(趣味科学)(2019年7期)2019-11-16
测控技术(2018年2期)2018-12-09
中国军转民(2017年9期)2017-12-19
学苑创造·A版(2017年4期)2017-05-13
上海大中型电机(2017年4期)2017-02-06