基于TDOA 算法的声源跟踪智能小车设计与制作
2023-07-26 03:41何军全黄明易
电子制作 2023年12期
何军全,黄明易
(1.百色职业学院,广西百色,533000;2.广西联泰汽车销售服务有限公司,广西百色,533000)
0 引言
在科技水平的不断提高下,工业机器人在自动化生产中取得良好的应用效果,不仅实现了对材料、工件搬运,还能严格按照相关标准和要求,科学操持工具。智能小车作为一种常用的自主移动机器人,在进行紧急抢险期间,经常存在人类无法直接到达指定地域探测问题,这就要求使用机器人前去完成,这是由于机器人在复杂地形中表现出强大的自动避障功能,因此,技术人员要参照机器人自动避障特点,利用TDOA 算法,加强对声源跟踪智能小车的设计和制作。
1 TDOA 算法概述
TDOA 算法作为一种重要的声源定位算法,其运用原理是通过利用接收器,实时接收和求取声音信号,确保所求取的声音信号距离各个接收器时间通常会存在的延迟,时间延迟本质上是不同接收器与指定声源之间存在相应的声程差[1],然后,利用定位方程解算法,对声源位置坐标进行精确化求解。该算法流程主要包含以下两个步骤:(1)在进行时延估计期间,需要从声音信号中,获得时间延迟整个过程,这种时间延迟主要发生于声源、接收器之间。而广义相关算法属于一种典型的时延估计算法。(2)位置解算。在获得时间延迟后,要利用接收器坐标,精确地求解声源坐标过程[2]。在整个位置解算中,所运用的主流算法主要包含以下两种,一种是迭代法,另一种是球面插值法。总之,TDOA 算法所对应的计算复杂度不断降低,完全符合算法实时性应用需求。
2 系统总体设计
在进行系统总体设计期间,技术人员要严格按照声音定位处理相关标准和要求,优先选用主体结构为H 型车模的智能小车,并利用TDOA 算法,保证声源定位功能实现效果,同时,还要安装和固定相应的避障模块,从而达到精确地规避前方障碍物的目的。该系统主要包含以下三个模块。(1)控制器模块。控制器模块在实际设计中,主要借助单片机系统化处理环境信息,这些环境信息主要是由传感器采集的[3],同时,结合环境信息,完成对相关信号的输出和控制。(2)传感器模块。传感器模块主要包含编码器、FM 传感器等模块,主要用于对环境信息和小车实际运行状态等多种信息的实时化采集和整理。(3)驱动模块。驱动模块主要是由电机、驱动电路组成,通过对单片机控制信号进行实时接收和整理,从而智能化控制智能小车运行状态。系统总体设计示意图如图1 所示,从图1 中可以看出,系统总体流程为:首先,通过利用FM 传感器模块[4],对环境信标进行实时化检测,并向单片机安全、可靠地传输相关声音信号。此外,还要利用编码器,不断地提高电机转速,将采集好的信号直接传输到单片机,从而形成良好的速度闭环控制模式,整个电机中,所采用的控制模块主要以增量式PID 控制模式,从而保证电机输出功率控制水平。在单片机的应用背景下,通过利用FM传感器模块,获得智能小车相对位置相关信息[5],并对电机期望速度值进行精确化计算,并借助速度环,对智能小车速度进行实时化控制,从而达到实时化控制智能小车运动方向的目的。
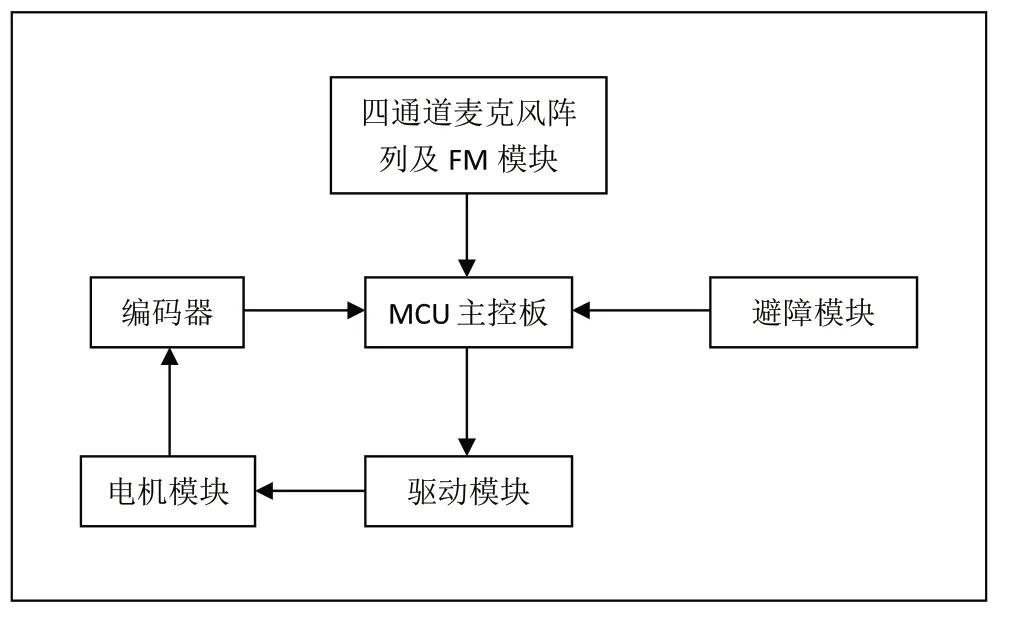
图1 系统总体方案
3 系统硬件设计
系统硬件设计示意图如图2 所示,从图2 中可以看出,该系统主要包含电源模块、声音采集模块、电机驱动模块等,为了提高系统稳定性,要优先选用电源芯片,并将相关信号直接传输到MCU 中,从而确保供电的连续性和稳定性[6],确保主控电路复杂度降到最低,此外,还要严格按照车模外形设计相关标准和要求,将驱动电路与MCU 进行分开处理。

图2 系统硬件结构图
■3.1 主控电路设计
该系统在实际设计中,要利用TC264 芯片的高性能、功能强大等特点,从而最大限度地提高车模控制准确度,此外,还要利用线性稳压源[7],为系统其他各个模块提供稳定的电能。该系统需要利用信标灯所发出的多种音频信号,为了确保信号噪声降到最低,要优化处理信号电平,从而防止噪声出现放大、衰减现象。在数字区域内,要综合处理高品质音频信号,最大限度地提高原有信号音质。
■3.2 电源模块设计
电源模块在实际设计中,要利用STC89C52 单片机,对所输出的高低电平进行实时化控制,并为智能小车前进、后退提供一定的驱动力,并完成对相应电源电路设计,同时,还要严格按照输入信号要求,利用稳压芯片,将电源统一设置为5V,为单片机、传感器提供源源不断的电能,同时,还要利用驱动模块,为电源提供稳定的电能,由于电机所对应的电流相对较高,其在实际制动期间,会出现电压降问题,如果将其他模块与其进行有效的并联处理,可以避免以上不良现象的出现。
■3.3 传感器模块设计
传感器模块主要包含以下两个部分:(1)红外线传感器。通过利用该传感器灵敏度高、可靠性高、灵活方便等特点,采用高低电平形式,将相关信号直接传输到CPU 中。(2)声音传感器。通过利用声音传感器,可以实现对光电传感器进行统一化发射与接收,并对四周环境声音强度进行实时化检测。总之,通过利用传感器,可以实现对障碍物距离和声源位置的实时化感知,确保智能小车能够自动躲避前方障碍物。
■3.4 控制器模块设计
控制器模块作为智能小车核心模块,主要集中化处理和分析各种输入信号,并对其进行实时化、自动化控制。同时,技术人员要严格按照红外传感器精准、声音传感器精确等原则,对控制器模块进行科学化设计。
4 系统软件设计
为了充分发挥和利用TDOA 算法的应用优势,提高声源跟踪智能小车的稳定性和实用性,技术人员必须严格按照如图3 所示的系统功能模块设计示意图,完成对用户登录模块、数据采集模块、自动避障寻声模块四大模块的科学化设计[8]。这些模块在实际设计中,所选用的开发工具和开发语言分别是eclipse、JAVA,整个web 展示主要运用了以下三种技术,分别是JSP 技术、Spring 技术和Hibernate 技术,其中,用户登录模块设计用到了JSP 技术;数据采集模块设计用到了Spring 技术;自动避障模块设计用到了Hibernate技术。

图3 系统模块设计示意图
■4.1 用户登录模块设计
为了避免因用户访问权限控制不当造成非法用户登录和访问系统重要信息而出现信息丢失、泄露问题,需要做好对用户登录行为认证处理,从而保证用户登录模块设计质量。首先,该系统利用各种加密技术,对用户所提交的账号、密码进行加密处理[9],然后,将加密处理好的信息数据直接传输到系统服务器中,由服务器集中化认证处理这些信息数据,当信息认证成功后,该系统会结合用户访问需求,将相关页面呈现在用户面前。反之,当信息认证失败后,该系统会显示“账号或者密码错误”弹出框,此时,用户需要核实和提交这些信息。用户登录主流程如图4 所示 。
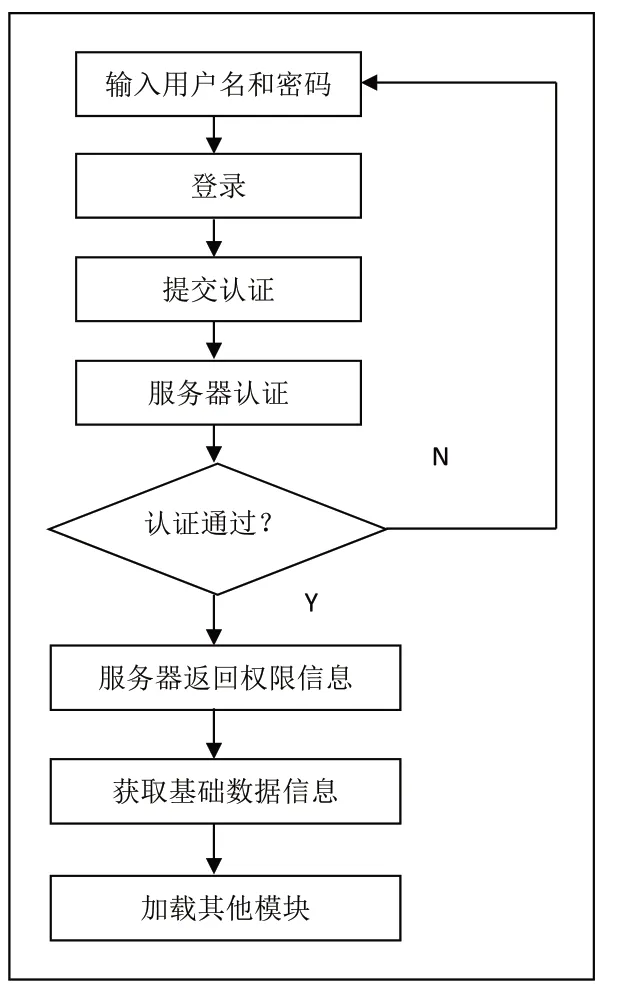
图4 用户登录主流程
用户登录模块核心代码如下:
■4.2 数据采集模块设计
通过利用TDOA 算法,将采样频率统一设置为2048 次/秒,确保该系统所返回的信号与所接收到的信号完全一致,但是,由于受到环境噪声、车模等多种因素的影响,严重影响了收音效果。通过利用TDOA 算法,对噪声干扰进行过滤处理,该算法具有响应效率高、灵敏度高、资源利用率高等特点,有效地解决了嵌入式系统相关问题[10]。此外,通过利用该系统动态化模型,对相关输入信号进行实时控制,并在综合考虑不同时间联合分布情况,结合单次测量,从而保证系统变化量估计结果的精确性和真实性,在此基础上,根据不同接收器与指定声源之间存在相应的声程差,利用定位方程解算法,对声源位置坐标进行精确化求解,然后,根据最终求解结果,实时监测和观察环境噪声随机误差。数据采集流程如图5 所示。

图5 数据采集流程
■4.3 自动避障寻声模块设计
智能小车在实际运动期间,为了确保小车有效地躲避处于熄灭状态的信标灯,技术人员要利用该系统内部红外光电传感器模块,完成对相关信号的采集和整理,确保小车在靠近障碍物,会自动触发规避动作。一旦开环控制不合理,会导致车轮转速难以精确控制问题,并引发智能小车出现打滑、甩尾等问题。此时,需要利用TDOA 算法,对智能小车进行闭环控制,确保智能小车能够正常、稳定、安全地运行。
将小车实时位置设置为相应的坐标原点,以X 轴、Y轴、Z 轴三维坐标,实时控制该系统控制器误差输入值。通过对上限速度进行科学设置,确保智能小车在距离较远位置处以上限速度运动的方式,对控制器调节速度进行设置,从而保证新一轮寻灯速度控制效果。此外,通过利用编码器,将所采集好的小车速度直接设置为反馈量,并采用PID计算方式,利用主控芯片,统一化处理相关信息数据,然后,将所获得消除误差控制输出量再次反馈给指定的小车驱动模块中,从而实现对智能小车的稳定化控制。自动避障寻声处理流程如图6 所示 。
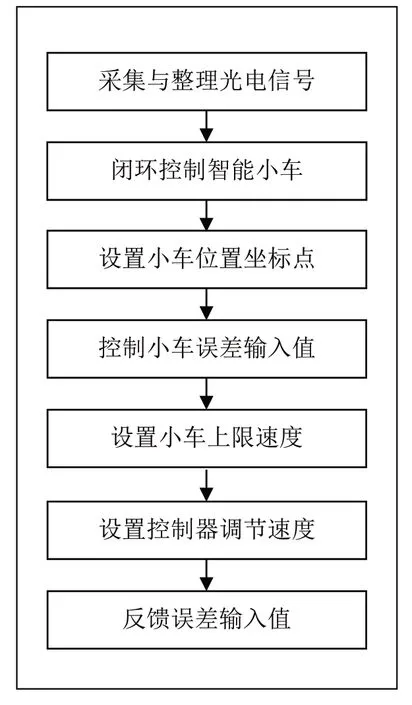
图6 自动避障寻声处理流程
5 结束语
综上所述,在TDOA 算法的应用背景下,本文所设计的声源跟踪智能小车所运用的主控芯片以“STC89C51”单片机为主,通过采用模块化设计思想,将传感器、控制器组合多种类型的检测电路,确保避障循声功能实现效果,尽管该系统避障功能实现效果相对比较理想,但是,循声功能灵敏度相对较低,并且很容易受到外界不良环境的影响,这就需要相关人员针对这些问题,对系统进行改进和优化。而智能小车作为一种先进、新型的智能机器人,充分发挥和应用了智能技术的应用优势,表现出较高的应用价值和应用前景。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
中等数学(2022年2期)2022-06-05
快乐语文(2020年36期)2021-01-14
科学大众(2020年17期)2020-10-27
小学生学习指导(低年级)(2020年6期)2020-07-25
电子制作(2019年23期)2019-02-23
文苑(2018年22期)2018-11-19
小学生学习指导(低年级)(2018年9期)2018-09-26
疯狂英语·新读写(2018年2期)2018-09-07
电子制作(2018年8期)2018-06-26