
纯电动商用车抖动问题的测试与分析
2023-07-30 16:54曾海军李剑刘武
专用汽车 2023年7期
曾海军 李剑 刘武


摘要:某纯电动商用车在满载质量下做30%爬坡度试验时,出现车身抖动幅度大、驱动电机过流故障,导致车辆无法正常行驶,严重影响了驾驶的舒适性。利用CAN等工具采集相关数据报文,通过该车型的抖动问题研究和试验测试分析,分析出车辆抖动和过流的原因是由于电机控制器MCU的防抖增益系数设置不合理、电机电流环超调及变速箱换档逻辑不合适引起的。
关键词:纯电动商用车;抖动;超调;增益系数;还扭
中图分类号:U467.5 收稿日期:2023-03-10
DOI:10.19999/j.cnki.1004-0226.2023.07.024
1 抖动源分析
车辆轮胎(车轮)不平衡的动态力,路面激励、发动机燃烧、发动机和传动系统旋转部件的不平衡,以及其他部件的相对运动产生的动态作用力,都会直接或间接地传到车身,引起车身局部(如转向系统、座椅、前围板等)的强烈振动,常称为整车抖动[1-2]。
纯电动商用车的结构如图1所示。从外形上看,与传统商用车并没有什么区别,但纯电动商用车的驱动系统主要由动力电池、驱动电机、电机控制器、变速箱等部分组成,其驱动电机相当于传统商用车的发动机,动力电池相当于原来的油箱,通过动力电池向电机提供电能,在电机控制器的控制下,驱动电机运转,推动汽车运动。
本文研究的纯电动商用车为中置后驱型,电驱动力系统布置为:a.动力电池系统布置在驾驶室后大梁两侧;b.驱动系统主要包括驱动电机、变速箱、传动轴、后桥等,通过悬置及吊架与大梁连接。主要振动源是包括驱动电机、变速箱、传动轴、车桥及轮胎在内的驱动系统。电动商用车中的电机抖动与乘用车相比较而言更加明显,对于汽车应用而言,电机的NVH问题具有极其重要的意义,并需要在设计阶段被广泛考虑[3]。
2 测试设备及方法
本次测试借助电脑、CAN卡、Eclipse for TriCore、Origin8、FlashSpirit、MATLAB、ECTEK Measure Data Analyzer V2等工具和软件对电机转速、扭矩、电流、工作指令等数据进行采集和分析;借助Vector Ape、CANape 14、CANalyzer等工具和软件采集变速箱控制器TCU数据并对其进行分析。
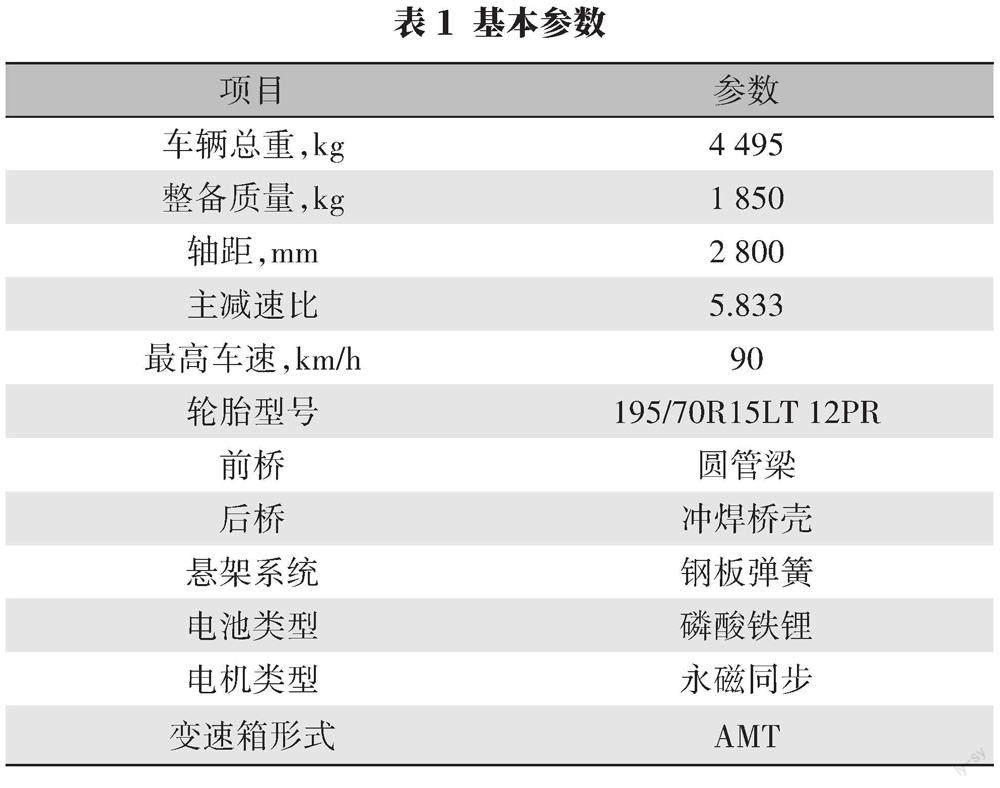
3 基本参数及解决思路
某纯电动商用车的基本参数见表1。
通过与驾驶员交流,实地跟车体验,主观感受整车抖动实际情况,排除车架、车桥及悬架等机械部件抖动原因,结合经验及现有测试设备,采集MCU和TUC数据,通过对原始数据分析,提出如下问题解决思路:a.优化MCU防抖功能;b.修正电机电流控制参数;c.改善换挡逻辑。
4 测试数据分析
4.1 MCU防抖数据分析
车辆起步时,采集MCU控制器数据,电机处于低转速高扭矩的工作状态,此时容易出现抖动,如图2所示,需要开启主动防抖功能。采集转速抖动的信息,可以得到周期性抖动的频率,将抖动频率输入防抖扭矩参数生成仿真器中,可以得到防抖滤波器的参数值,将其应用于车上,观察产生防抖扭矩的值,是否对波动转速产生抑制作用,并根据防抖效果,适当调整最大防抖扭矩和增益系数。
4.2 电机电流数据分析
转速波动过大时,为响应大扭矩导致电流失控,如图3所示,控制器报过流三级故障。目前电机控制采用查表法,即不同的转速下,可响应的最大扭矩不同,当转速高频剧烈波动时,对扭矩的控制会出现超调的情况,进而引起电流调节的不稳定,控制器过流风险显著增加,可通过修改电机控制参数缓解该风险,但还是需要从根源上解决过流问题。
4.3 换挡逻辑分析
本文中的纯电动商用车采用的是6挡AMT自动变速箱,换挡过程中出现打齿异常声音,采集变速箱TCU数据,根据变速箱TCU数据分析,是由于电机异常扭矩导致的,如图4所示,需要电机在换挡过程中关闭主动防抖功能。
5 解决措施及验证
5.1 针对MCU防抖功能问题
优化MCU防抖参数,将对应抖动频率作为初始参数输入滤波器后可得到抖动滤波参数,如图5所示,并结合试验,调整增益系数,可对车辆起步抖动起到很好的抑制效果,如图6所示。
5.2 针对电机电流控制参数问题
优化电流环KP参数后,减少电流超调量,同时配合主动防抖功能,满载坡道起步换挡的电流控制质量得到提升,波动在可控范围内,如图7所示。
5.3 针对换挡逻辑问题
在TCU的换档逻辑中,换挡过程分为两个阶段:第一阶段为调速换挡,挡位挂上后扭矩清零,进入第二阶段-还扭。这两个过程合在一起叫做换挡过程,第二阶段还扭过程为扭矩从0开始增加到整车的目标扭矩,在这个过程中实际的机械结构已经挂上挡,在满载爬坡的工况下电机易出现抖动情况,需要启用防抖功能。但变速箱的异响出现在第一阶段,所以需要变速箱发送一个标志位将这两个过程区分开,以便能消除换挡过程中出现车辆抖动的风险。换挡调速过程中关闭主动防抖,还扭過程中开启主动防抖,抑制车辆起步抖动的同时也缓解了换挡结束后的主动防抖功能带来的转速波动引起的异响,如图8所示。
6 改进后的测试结果
通过优化MCU防抖参数,调整增益系数、优化电流环KP参数,减少超调量及优化换挡逻辑后,重新标定车辆程序,车辆数据测试如图9所示。可以看出,电机扭矩、转速、车速都为平滑的曲线,电机实时响应目标扭矩,车辆整体受力平衡,可匀速行驶。通过优化MCU控制算法及变速箱换挡逻辑,解决了车辆满载爬坡时出现的大幅度抖动和电机过流问题,提升了车辆平顺性。
7 设计优化建议
依据故障现象和对原始数据的分析,抖动故障主要是因为正常驱动的换挡逻辑不适用于满载爬坡工况,爬坡时挡位升高,导致电机扭矩与速比匹配不合适,电机无法在高转速下响应峰值扭矩,进而引起车辆抖动和出现电机过流故障。可通过减小电机峰值扭矩的方式,维持爬坡时的低挡位,同时优化主动防抖的功能参数,增加防抖扭矩响应灵敏度,在抖动初始时施加较大的防抖扭矩,遏制抖动的加剧。
8 结语
本文以某电动商用车满载爬坡时整车抖动为案例,对MCU防抖功能、电机电流参数及变速箱换挡逻辑等数据进行分析,通过对换挡逻辑的优化、防抖滤波器增益系数调整及减少电流超调量来达到解决故障的目的,为纯电动商用车类似问题的解决提供了很好的参考意见,让更好的产品服务于客户。
参考文献:
[1]曾晰,申秀敏,李利明.新型纯电动汽车抖动现象测试与分析[J].工程与试验,2017(3):41-45.
[2]王志亮,刘波,李晶华,等.汽车抖动性产生机理与分析方法研究[J].噪声与振动控制,2020(8):87-89.
[3]施佳能,丘云燕,刘志翔,等.纯电动商用车坡道驻车抖动研究与优化[J].现代工业经济和信息化,2022(6):242-245.
作者简介:
曾海军,男,1981年生,工程师,研究方向为纯电动商用车底盘研发与项目管理。
