
“华龙一号”不锈钢覆面焊缝可视自动化射线检验技术应用
2023-08-23 06:15韩景涛
核科学与工程 2023年3期
韩景涛
“华龙一号”不锈钢覆面焊缝可视自动化射线检验技术应用
韩景涛
(四川中核艾瑞特工程检测有限公司,四川 绵阳 621000)
X射线检验在核电厂核岛钢衬里及不锈钢覆面水池等薄板焊接施工部位检测应用非常广泛。本文结合“华龙一号”堆型不锈钢覆面水池焊缝射线检测量大、施工周期紧、探伤作业窗口少、常规射线检验方法效率低、劳动强度大、操作班组配置数量高等不利因素,结合不锈钢施工环境特性,开展可视自动化X射线检验技术应用,有效实现X射线探伤作业的远程操控,降低人员受照辐射剂量,形成了“可视化、自动化、标准化、高效化”X射线检验设备装置,拓展了自动化创新射线检验工艺技术在“华龙一号”工程实体上有效推广应用。
“华龙一号”;X射线检验;可视化操控;自动化设备;技术应用
“华龙一号”堆型是中国自主研发第三代核电技术,是中国核电工程技术“走出去”推荐堆型。“华龙一号”土建工程,其射线检验工作量较M310堆型增加10倍以上,单堆不锈钢覆面水池的射线检验拍片量达5~6万余张,且均在工程关键路径,而项目整体建设工期没有增加。为确保工程进度有序推进,在相对紧迫建设周期和探伤窗口内完成急剧增加的射线探伤量,迫切需要改进现有、在用的常规射线检验工艺方法和设备,提高检测功效,实现自动化射线检验技术于核电厂工程实体的创新应用。推动“华龙一号”不锈钢覆面射线检验技术,具备远程可视化、操控自动化、工艺标准化、探伤高效化的创新发展。
实现自动化的射线检验工艺,首先应有适合的设备、制定有效的专项检验工艺。X射线探伤机需要具备可视化自动行走,以及按照焊缝实际有效片长完成射线机步进范围的远程操控升降装置,属于两个不同的设备个体,如何通过适当的拆卸和改装,使可视自动化设备装置具备轻便、体积小、X射线透照功率强度满足要求、可实现连续探伤作业、远程操控视频清晰、性能稳定、装卸便捷、操作安全稳固等性能要求,形成融为一体的可视自动化X射线检验装置,并综合应用于“华龙一号”堆型不锈钢水池,不同焊接部位的射线检验。尤其是创新融合机型自动化检验设备,应能实现三维空间操控自动运行、减少自动化检测盲区、确保焊缝射线检验全覆盖及有效的搭接,避免漏检、错检质量风险是研究的核心难点。
1 常规射线检验存在应用局限与不足
核电厂不锈钢敷面水池焊缝分布多,焊接量大,且不同功能用途的房间,其结构形式也各不相同,唯需要进行射线检验部位的焊缝形式均为平(底板焊缝)、横、立(池壁焊缝)三种形式焊接位置。
早期不锈钢水池常规射线检验方式,采用结合利用敷面板焊接时铺设满堂脚手架、跳板等工装设施,为探伤人员行走和架设X射线机作业的平台。脚手架搭设材料用量多、人工成本高,最大的不利是不锈钢敷面水池除了对焊接质量要求高,还对施焊环境、敷面板清洁度有较高的要求,脚手架的日常维护管理及完工拆除工程量大,存在异种材质间磕碰、擦伤、划痕,对不锈钢敷面板形成潜在的二次污染腐蚀风险。
不锈钢水池对接焊缝要求进行100%射线检验,采用常规射线检验方式,探伤班组人力投入大,核电现场批准射线探伤许可作业窗口时段紧,且存在人员操作技能不稳定等不利因素,严重制约和影响了实际检测功效需求。因此,迫切需要通过采用自动化检测设备、结合“数字华龙”建设理念,积极推进无损检测自动化创新工艺方法的研究与应用。
2 可视自动化X射线检测装置研制技术内容
结合漳州核电“华龙一号”工程在建项目为依托,梳理核岛内各不锈钢水池结构特点及焊缝位置等工况,突出X射线自动化检验设备工艺性能、可远程、可视化的操控要点,以降低劳动强度和用工、减少辐照危害、提高拍片效率,达到有效防控常规射线检验过程中存在,高空作业架设与搬运探伤设备,以及人员高空行走、攀爬坠落等潜在高风险因素为研究重点。研制技术内容如下:
(1)结合“华龙一号”核电堆型不锈钢水池/箱结构焊接特点及施工环境,结合麦克纳姆轮独有的灵活运转性能,在地面行进可达性非常高,可全方位移动等性能原理,研究开发可视自动化AGV机器人三维空间运行装置、射线机夹持稳固工装一体化操控射线检验设备;
(2)会同X射线机生产厂合作研发,对X射线探伤机控制器及机身,在原有应用基础上进行针对性的改造升级,使研制设备的自动化控制系统与其实现通信联动的远程操控功能;
(3)红外线十字定焦对中装置,是实现X射线探伤机远程操控、可视自动化检验的核心。曝光点的准确定位是确保射线底片缺陷返修定位的关键依据,供操作者及时掌握自动化检验设备运行中,随时核查射线探伤机对应焊缝检测部位是否与实际待检位置准确匹配;
(4)根据射线检验透照方式、射线特有散射影响、焊缝100%射线检验要求每张底片有效搭接及一次透照有效片长等技术要求,设计自动化射线检验设备进行每张焊缝透照长度的停留曝光时间和步进范围,与焊缝实际布片张数序号位置准确对应性的研究;
(5)针对不锈钢覆面水池预留拍片孔规格与分布特点,设计适当宽度、厚度、长度,具备相应韧性“布片带”,替代常规钢带布片方式,减轻钢带重量,增强布片可轻便进入及悬挂性和贴合性。并依据所需透照有效片长的要求,在新型布片带上隔段设置稳固射线底片暗袋夹,便于布片作业时快速放入和底片曝光前后的抽取替换。
3 远程可视操控AGV机器人射线自动化检验设备样机模型
为了实现“华龙一号”堆型核电厂“高效率、多创新、高质量”创新发展建设需求,无损自动化检验技术必须与自动化焊接技术的应用形成同步跟进提升。在原有理论基础上开展了多次设计优化和现场实际应用论证,最终形成可视、远程、自动化操控AGV机器人射线检验设备系列装置。
3.1 适用于底板(地面平缝位置)可视自动化射线检验设备
(1)射线机透照窗口的位置朝向,可对不锈钢水池地面底板部位的长直焊缝实施连续步进式100%射线检验(见图1)。
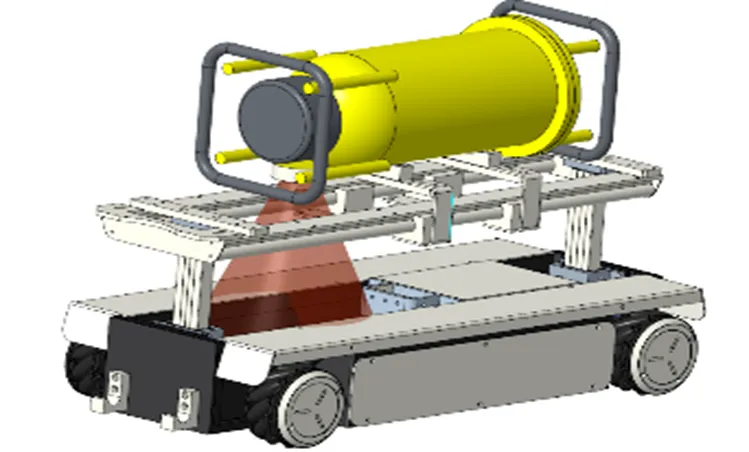
图1 底板长直焊缝自动化射线检验
(2)对于不锈钢水池底板地面边角处、池壁墙面拐角处,即池壁墙面与底板地面交汇拐角处焊缝,通过将X射线机延伸调整至侧向合适位置,满足射线机透照窗口对待检部位的有效辐射区,即可进行该处部位的连续射线检测,实现池壁地面拐角等部位无死角探伤覆盖(见图2、图3、图4)。
3.2 适用于池壁(墙面横缝位置)可视自动化射线检验设备
对于池壁横向焊缝位置,X射线检验自动化设备需要满足侧向水平步进功能。同时考虑到射线机的自重与透照角度和高度,需要具备稳固和跨距幅度的升降步进功能,满足一定池壁高度位置的横缝射线检验需求(见图5)。
3.3 适用于池壁(立缝位置)可视自动化射线检验设备
针对池壁墙面部位的立向焊缝进行连续自动X射线检测时,通过在AGV机器人基座基础上安装一套竖直方向、可快速插接的刚性轨道,可远程操控升降机器人携带X射线机进行上下升降,从而实现立项焊缝部位的连续拍片(见图6)。

图6 池壁立向焊缝自动化射线检验
(1)池壁墙面立向焊缝检测导轨组合方式自动化设备配置 2 000 mm/1 000 mm/500 mm/ 300 mm/200 mm 多规格长度的钢性轨道,根据实际墙面焊缝高度,通过便捷的插接方式,进行任意组合AGV检测机器人轨道长度,高度可达3~6 m,符合大多不锈钢覆面水池墙面焊缝射线检验高度的应用需求。
(2) AGV机器人轨道对接方法
先将安装有升降系统的一段2 000 mm基座轨道,底部安装在AGV机器人中心安装基座上垂直锁紧。轨道一头安装有插内衬,依次将每段轨道插入另一根轨道内部,贴实按紧后,通过螺钉卡扣锁紧。
X射线机采用CP160型X射线探伤机,该机型的特点是体积小、重量轻,尤其是可连续进行X射线曝光透照功能,作业期间无需休息,有利于射线检验功效的提升。X射线机步进轨道是根据所需检测立向焊缝高度、选择相应长度的轨道、依次对接、插接后锁紧螺钉即可。机身通过固定在高度升降机器人锁死装置上,可沿着立向轨道保持机身,形成稳固定向的上升和下降。轻便机型的应用,也是确保AGV检测机器人行走过程中无晃动影响的有效保障。
X射线机及升降机器人上安装2个摄像头、十字激光对准仪。通过便携式远程遥控器系统进行控制,实现射线检验作业远距离操控和观察。该项创新功能,尤其适合应用于存在高辐射剂量的作业环境。
4 依据不同功能水池结构特点实施AGV机器人设计应用分析
4.1 内置换料水箱功能及结构特点
“华龙一号”堆型不锈钢覆面内置换料水箱位于核岛内部(见图7、图8)。设计标高-6.646 m~-3.830 m,位于内部结构厂房基础底板之上。水箱由4个房间组成,1个多边形环状房间连接3个多边形扇状隔间,以专用型钢作为焊接垫板对接拼装而成。内置换料水箱覆面需进行射线检测的焊缝约2 800 m,采用手工钨极氩弧焊和热丝TIG自动焊焊接方法进行焊接,水箱总重量约为200 t。
内置换料水箱作为核岛内部最低位置的功能水箱,在核岛正常运行期间起到容纳收集反应堆堆芯水池的换料水,在突发重大事故期间,对汇集的水进行收集,并由水箱内的设备过滤后再供给安注箱对堆芯进行冷却,保证堆芯安全。

图7 内置换料水箱三维模型图

图8 内置换料水箱先贴法工程实体图
内置换料水箱是依据核岛内部结构圆周形式分布的,房间高度为2.816 m,焊缝分布较为规整,池壁、顶部和地面均为满铺不锈钢。需要进行100%射线检验的焊缝,大多为池壁竖向(立缝)及底板(平缝)焊缝。就其焊缝形式及房间高度而言,最为适合射线检验自动化工艺技术的实际应用。该部位池壁焊缝部位高度适中,房间焊缝排布规整,可以利用AGV机器人基座在地面行进,配套刚性竖向轨道,将射线探伤机进行连接固定。
对于立向焊缝,可采用基座就位后锁死固定功能,在拍片过程中仅操控射线机的升降,利用红外线十字对中可视功能,观察射线机透照窗口对中的准确性(见图9)。
对于横向焊缝,可采取将射线机在立向轨道上的锁死固定功能,在拍片过程中仅操控AGV机器人基座的侧向平移,利用红外线十字对中可视功能,观察射线机透照窗口对中的准确性(见图10)。

图9 池壁立向焊缝AGV机器人自动射线检验步进形式连图

图10 池壁端部横向焊缝AGV机器人自动射线检验步进形式连图
4.2 非能动堆腔注水箱功能及结构特点
非能动堆腔注水箱位于核岛内部结构+1~+23.02 m,水箱高度约22.02 m,位于反应堆堆芯旁边。水箱结构整体为扇形结构,由1面弧形墙和3面直墙组成(见图11)。

图11 非能动堆腔注水箱三维模型图
非能动堆腔注水箱为“华龙一号”机组“非能动”系统的重要组成部分,在运行期间发生重大事故时,在不需要提供人为动力的情况下,为堆芯提供冷却水的安全水箱功能。
非能动堆腔注水箱是“华龙一号”堆型核电厂,不锈钢覆面水池净深最高的一个房间,其深度达到22.02 m。AGV机器人自动化射线检验设备在这个作业环境中,竖向刚性轨道的连接高度与基座配套连接的方式,难以形成有效应用。因此,需要在此基础上进行适当的优化与改进(见图12)。
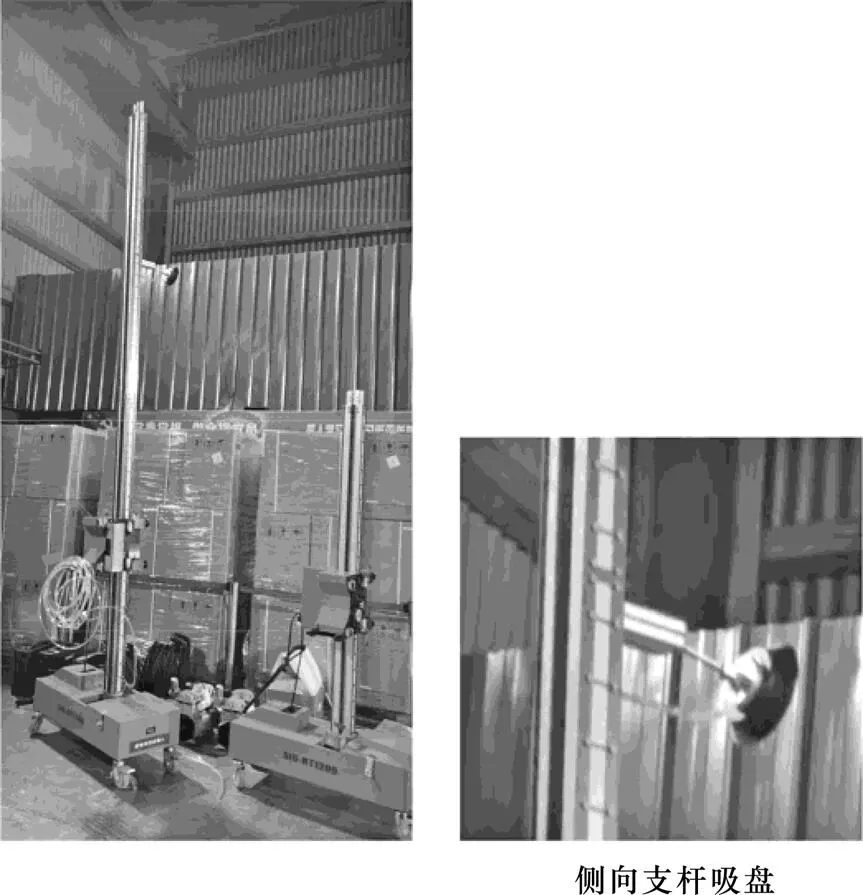
图12 AGV机器人
首先,将AGV机器人基座去掉麦克纳姆轮装置,缩小基座体积、增加基座重量确保其稳固性能,采用万向轮及轮毂锁死装置,便于快速将AGV机器人基座,推拉至需要进行射线检验的池壁立缝部位,基座就位后逐节安装刚性轨道至焊缝顶部高度。
其次,针对净深较大池壁焊缝进行专项优化改进,采用分段侧向支杆吸盘固定工艺,使AGV机器人基座、刚性轨道与不锈钢覆面实现紧密、牢固的支撑和吸附连接,确保射线探伤机安装至刚性轨道上自动拍片升降过程中的稳固性。同理运用红外线十字对中装置,远程操控观察射线机曝光窗口,聚焦焊缝位置的准确对中。
用于非能动堆腔注水箱,可视自动化AGV机器人射线检验工艺,在核电厂不锈钢覆面水池实体射线探伤应用(见图13)。

图13 轨道吸盘安装射线机稳固装置
4.3 燃料乏池功能及结构特点
乏燃料水池位于燃料厂房+3.744~+16.55 m,水池整体深度约12.806 m,水池通过水闸门与燃料转运舱相通,燃料转运舱通过转运通道与容纳堆芯的堆腔水池相通。水池结构比较规整,由4面直墙组成(见图14)。
乏燃料水池主要贮存核岛运行期间所需的裂变燃料棒以及反应完成的乏燃料棒。水池内贮存冷却水,保证燃料存放期间的温度处于安全范围内。
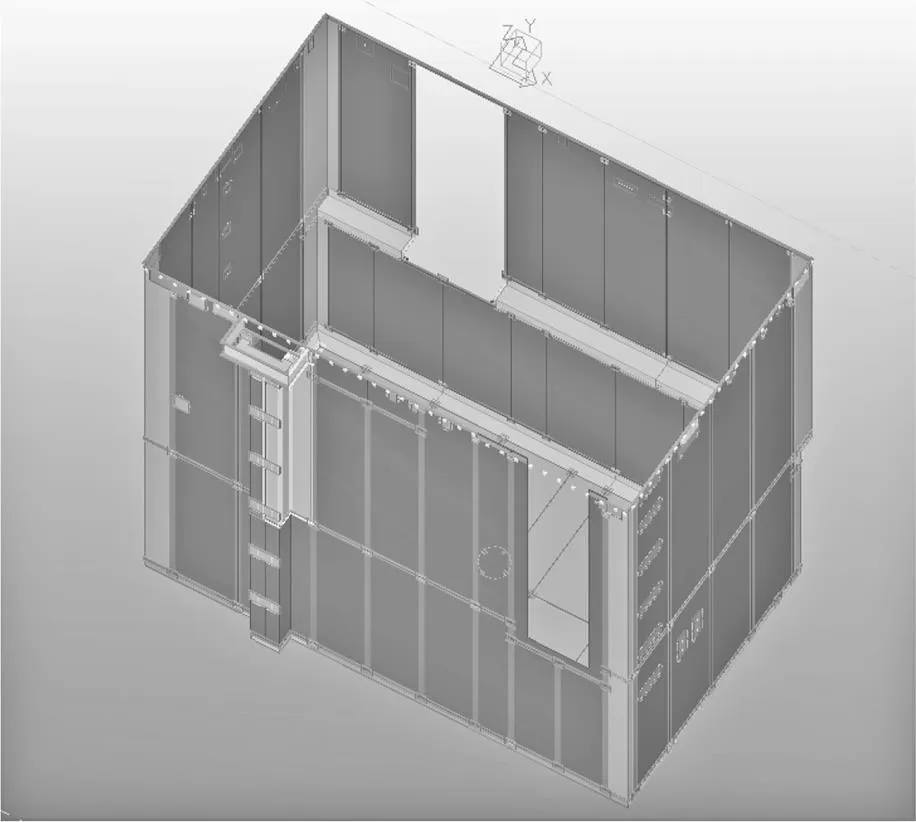
图14 乏燃料水池三维模型图
4.4 辅助给水箱功能及结构特点
辅助给水箱位于核岛电气厂房-7.696~-0.55 m,由两个规整的长方体房间组成,水箱整体高度约7.146 m,水箱为全密闭结构,每个水箱有两个供人员出入的人孔(见图15)。

图15 辅助给水箱三维模型图
辅助给水箱为核岛电气设备冷却水储存水箱,为核岛安全运行设备提供循环冷却水。
4.5 非能动热量导出水池功能及结构特点
非能动热量导出水池位于核岛外壳+50.6~+55.6 m,由三个相连的环形房间组成,每个房间内有一个标高+42.3~+50.6 m的地坑(见图16)。
非能动热量导出水池作为“华龙一号非能动”系统的组成部分,在核岛运行期间发生重大事故时,在不需要提供人为动力的情况下,将核岛内部的热量导出冷却,并对安全壳进行喷淋冷却,保证核岛主体安全,为人为介入争取时间。
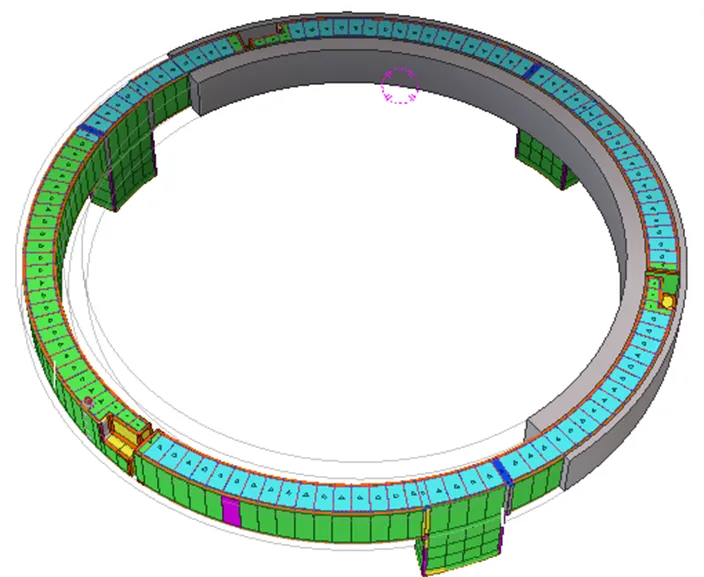
图16 非能动热量导出水池三维模型图
4.6 燃料乏池、辅助给水箱、非能动热量导出水池可视自动化AGV机器人射线检验应用
燃料乏池、辅助给水箱、非能动热量导出水池,三个不同功能的不锈钢覆面水池设计结构净深,均远远小于非能动堆腔注水箱的净深高度,该类不锈钢覆面水池焊缝的射线检验,可参照内置换料水箱可视自动化AGV机器人射线检验工艺实施。
对于地面焊缝,采用麦克纳姆轮AGV机器人,利用红外线十字对中装置,将射线机安装在稳固架上,曝光窗口朝向地面,使用遥控监视面板,远程操控麦克纳姆轮AGV机器人在地面焊缝区域的行进,以及曝光点的准确对中(见图17)。

图17 AGV机器人地面焊缝自动化射线检验
对于池壁焊缝,采用麦克纳姆轮AGV机器人结合刚性轨道的竖向连接,实现池壁立向、横向焊缝的可视自动化射线检验。
5 麦克纳姆轮AGV机器人可视自动化射线检验技术创新点
5.1 麦克纳姆轮AGV机器人组成及应用原理
本项技术研究涉及《一种用于核电厂“麦轮”AGV机器人可视自动化射线检验遥控设备》应用技术,具备行业技术的创新先进性。麦克纳姆轮AGV机器人自动化射线检验设备主要由:AGV机器人、X射线机、多功能地面检测装置、池壁墙面自动检测组合套装设备等组件组成。
麦克纳姆轮简称“麦轮”,是一种可以进行全方位任意移动的轮子,由轮毂和围绕轮毂的辊子组合而成。麦克纳姆轮的辊子轴线与轮毂轴线成45°夹角,在轮毂的轮缘上斜向分布着许多小轮子(即“辊子”),致使轮子可以横向滑移。辊子又是一种没有动力的小滚子,其母线十分特殊,当轮子绕着固定的轮芯轴转动时,各个小滚子的包络线会形成圆柱面,可以驱动轮子实现连续地向前滚动。AGV机器人由这种轮毂加以组合,便可实现自动化射线检验设备基座,在狭窄空间、任意方向的连续移动功能。
5.2 “麦轮”AGV机器人操控设计要点
5.2.1X射线机安装联机方式
X射线机的固定:采用射线机稳固专用捆绑带进行固定和锁紧;
X射线机的安装:依据射线检验透照工艺要求,机头窗口至不锈钢焊缝表面需要确保具有600~700 mm的透照焦距。并重点注意射线机端部散热口,以及射线机窗口辐射透照范围内应无任何阻挡物;
5.2.2红外线十字对中精准调节要求
X射线机就位于AGV机器人基座刚性轨道上的设备稳固架后,先调整红外线十字激光中心位置与X射线机靶心重合,再调节射线检验所需透照焦距,最后通过便捷式远程遥控器,观察红外线十字准星与焊缝相应位置的对准情况。开始自动行进射线检验过程中,也可进行准心位置的微调操作与实时影像监控。
便捷式遥控器与发射器、天线,通过50 M数据线进行连接,远程监控十字激光对准器中心位置与焊缝表面十字标识位置重合精准性,通过监控视频清晰可见焊缝附近的搭接标记、像质计、铅字等标识(见图18)。

图18 实时视频监控
5.3 麦克纳姆轮AGV机器人技术性能创新
结合“麦轮”AGV机器人独有的连续行进移动及横向滑移的灵活性,在核电厂不锈钢覆面水池结构空间的适用性强,地面覆盖可达性非常高,并且可实现全方位、狭窄空间直线行进和横向滑移,具有高效可操作及应用性能。
AGV机器人通过锂电池进行供电,设有AC-220 V充电口,充电通过专用锂电池充电器进行充电,配有按钮开关,充电时间约为4 h。锂电池充满电启动后,可连续工作10 h以上,有效满足核电厂射线探伤作业,辐射安全监管对当日施工现场夜间射线探伤,批复22:30—次日凌晨6:00探伤许可证的作业窗口时间。
专用便捷式远程控制器,设置在线图传操作显示器、遥控器按钮、数据信号传输接口、电源开关、电量显示、充电口等设备组件。可与“麦轮”AGV机器人通过无线信号控制链进行数据传输,实现远程可视化操控AGV机器人行走和远程实时图像传送与监控功能(见图19)。

图19 便捷式远程遥控器
便携遥控器具备无线、无线中转信号、有线三种转换形式的中转方式进行信号传输,AGV本身具有无线接收功能。为了优化本设备可视影像信息准确、不失真的实时传输与远程监控功能,可对X射线的频段、对讲机频率、AGV机器人遥控信号灯频段等,可能会影响传输信号的干扰源进行有效屏蔽。“麦轮”AGV机器人,经核岛现场实地远程遥控测试,可满足在相对密闭的空间(如核岛内部结构房间A室到B室间距50 m范围,测试介质为混凝土阻隔墙体),无任何电信号的恶劣信号屏蔽环境工况场所的有效应用。
“麦轮”AGV机器人可视自动化射线检验设备技术应用,在核电厂建设无损检测领域,就自动化的射线检验工艺技术,进行了有效的创新研发和可行性试验论证。实现了“华龙一号”堆型核电厂,核岛不锈钢覆面施工设计中,形成针对大批量焊缝射线检测作业的“便携远程遥控操作”和“可视化的实时监控与自动化射线检验”两项射线检验技术领域的重大创新。
(1)X射线检验便携远程遥控操作的工艺创新模式,尤其适合于不锈钢水池净身高度较大的底板焊缝100%射线检验部位,以及作业环境存在较高辐射剂量率的环境场所。对透照焊缝一次布片、标识排布完成后,人员均可撤离至安全防护区域实施远程可视化的遥控操作,即可降低射线检验人员频繁行走及搬运设备的劳累强度,自动化的遥控操作也能大幅减少作业班组人员配置,实现降本增效,并可最优化地避免作业人员超辐射剂量或误照射风险。
(2)可视化的实时监控与自动化射线检验工艺技术的有机结合,实现了核电厂土建施工过程中无损检测自动化技术的创新应用。“麦轮”AGV机器人可视自动化射线检验设备技术,具备如下设备技术功能创新:
1)AGV机身配备3~4个全景摄像头,实现对焊缝、AGV机器人行走姿态、地面工况、室内工况等作业环境条件,进行实时有效的监控。无线摄像头体积小、高清、并具有夜视功能,高清1 080 P大于200 W像素。考虑摄像头、接收器、遥控器各个信号的频段、距离、功率、增益等因素,采取相应屏蔽措施防止信号传输干扰;
2)在线图传显示时,可进行任意调用单个画面进行局部放大监控,在线图传监控画面延时低于180 ms;
3)远程图传监控时,对焊缝及热影响区边缘摆放的5~10 mm字高铅字、像质计等标识信息,均可进行清晰识别,并能显示X射线机透照窗口至焊缝表面的距离。正常X射线机距离焊缝[(600~700)±50]mm,通过视频监控能有效掌握和控制拍片所需的透照焦距要求,确保射线底片一次有效透照长度的符合性;
4)远程在线图传遥控器设计成手提式、开合式两种方式,利于方便携带和操作便捷。具备可保存50 G自动化射线检验监控过程视频影像资料信息的存储功能,通过USB接口读取和保存。所有通信接口及线路均为模块化,利于各模块的连接插拔,便于探伤作业时可靠地安装与拆卸。
X射线机与AGV机器人基座的刚性轨道连接完毕后,其射线机于轨道上下步进高度的升降方式,采用自动光电限位控制技术,即依据所需射线底片的有效片长,为射线机窗口红外线十字准星的自动升降透照步进距离。射线机高度升降为无线操控方式,升降电机通过无线信号控制,自身单独配备锂电池,仅供射线机高度升降功能。X射线机电源、高压控制器的连接电缆,通过自动卷线盘(集电环)的方式伸展或收拢。省去了高度升降电缆线,在射线机升降过程中的连线回收与电缆线回收的相互干扰与阻碍的难题。
“麦轮”AGV机器人可视自动化射线检验设备技术成果已形成“华龙一号”核电厂堆型,不锈钢覆面水池射线检验工艺技术创新,从功效、安全、自动化检测技术应用等方面,均大幅优化改进了常规射线检验方法的局限和不足,达到了国内无损检测行业技术领先水平。
6 研究成果对自动化射线检验技术创新发展的应用前景
核电是电力系统中最稳定的基础能源支撑之一,核电在我国新时代能源体系建设中不可或缺。核电是唯一能够大规模替代化石能源的基荷电源,核电全寿命周期具有较好的成本竞争力,利用核电替代传统化石能源有利于降低电力系统成本,国家对于低碳排放及推广清洁能源的要求,成为了核电行业持续发展的重要推力。
“十四五”规划和2035年远景目标纲要提出,“推进能源革命,建设清洁低碳、安全高效的能源体系、安全稳妥推动沿海核电建设”。可以预见,我国核电行业将迎来重大发展机遇,为实现碳达峰、碳中和目标发挥积极作用。与此同时,核电发展本身的规律和未来趋势也越发明显。
目前国内核电厂建设主要为“华龙一号”堆型,是具有完全自主知识产权的三代核电厂建设堆型。中核集团“华龙一号”总设计师邢继总曾说过“实现百万千瓦级大型先进压水堆自主化一直是我国核工业人追求的目标,“华龙一号”是三代核电人共同的心血,很幸运到我们这一代的时候把它变成了现实”。同时提出“能动与非能动相结合”为核心的先进核安全设计理论,推动并参与制定了“数字核电”发展规划,依托“华龙一号”示范工程开发的“数字核电厂”也已具雏形,建立了数字电站交付的首个企业标准,实现数字华龙与实体华龙的同步交付。结合行业大力推广的自动化焊接工艺技术在核电厂工程实体的应用成效,更对无损检测专业技术向自动化检验技术设备的研发与应用,形成了迫切的跟进需求。
由此,“麦轮”AGV机器人可视自动化射线检验设备,结合自动化焊接质量和功效的提升基础上,具备良好的行业需求前景。该自动化射线检验创新设备,已在福清、漳州核电厂及霞浦某核工程项目得到了良好、有效的应用。从射线检验实际功效、减少班组作业人员配置、降低劳动强度、确保辐射安全等方面,均得到大幅提升和优化,实现了国内行业技术创新引领。
7 结论
(1)本项用于核电厂《“华龙一号”不锈钢覆面焊缝可视自动化AGV机器人射线检验技术研究与应用》专业技术研究成果,有效解决、攻克、创新了核电厂土建施工中射线检验工艺设备的常规应用方式。
(2)通过对不同检测工况环境采取自动化行进和运行的远程操控、实现了“麦轮”AGV机器人操作过程中的灵活升降、调位及转向功能,有效减少自动化设备检测盲区。
(3)尤其是创新研制应用的射线机曝光窗口红外线聚焦定位功能,可确保焊缝每张射线透照底片搭接和有效片长的确定,该功能可实现远程视频操控完成。
(4)该设备特别适合应用于径深高度大,以及存在辐射剂量的焊缝池壁作业环境,将设备就位及一次性布片后,即可实现远程操控自动化射线检验。
(5)创新自动化研制设备,可在核电厂射线检验专业技术领域中,进行良好的推广与应用。
[1] 强天鹏. NDT全国特种设备无损检测人员资格考核统编教材射线检测[M]. 北京:中国劳动社会保障出版社,2007.
[2] 法国核岛设备设计和建造规则协会. 压水堆核岛机械设备设计核建造规则:RCC-M 2000第Ⅲ卷MC篇[S]. 法国,AFCEN,2010.
[3] 核工业标准化研究所. NB/T 20003.3—2021:核电厂核岛机械设备无损检测:第3部分射线检测[S]. 北京:中国原子能出版社,2021.
[4] 全国锅炉压力容器标准化技术委员会. NB/T 47013.2—2015:承压设备无损检测:第2部分射线检测[S]. 北京:新华出版社,2015.
[5] 全国无损检测标准化技术委员会. JB/T 7902—2015:无损检测线型像质计通用规范[S]. 北京:机械工业出版社,2015.
Study and Application of Visual Automatic X-ray Inspection Technique for Weld Seams of “Hualong One” Stainless Steel Cladding Weld
HAN Jingtao
(China Nuclear Industry 24 Construction Co.,Ltd.CNEC-ARIT,Mianyang of Sichuan Prov.621000,China)
The X-ray inspection is widely used in the detection of thin plate welding construction parts such as nuclear island steel lining and stainless-steel cladding pool in nuclear power plant. Combing with the unfavorable factors of the weld seam inspection volume of the Hualong One type stainless steel cladding pool, tight construction period, few flaw detection operation windows, low efficiency of conventional radiographic inspection methods, high labor intensity, large number of operation teams, and the environmental characteristics of stainless steel construction, this paper carry out study on the visual automatic X-ray inspection technique, which effectively realizes the remote control of X-ray inspection operations, and reduces the radiation dose of personnel. These form a visual, automated, standardized, and efficient automatic X-ray inspection equipment, which expands the effective application of the automated innovative radiographic inspection process in the Hualong One project entity.
HPR One; X-ray inspection; Visual operation & control; Automation equipment; Technical application
TL48
A
0258-0918(2023)03-0620-10
2022-07-11
韩景涛(1971—),男,吉林长春人,学士,研究员级高级工程师,现从事核行业无损检验专业技术研究
猜你喜欢
设备管理与维修(2022年21期)2022-12-28
设备管理与维修(2022年21期)2022-12-28
心声歌刊(2022年2期)2022-06-06
水泵技术(2022年1期)2022-04-26
中国特种设备安全(2022年1期)2022-04-26
中国核电(2021年3期)2021-08-13
水泵技术(2021年2期)2021-07-31
中国核电(2017年1期)2017-05-17
科技视界(2016年15期)2016-06-30
环球时报(2016-03-16)2016-03-16
