
基于Simulink的车辆横向控制模型软件的参数分析
2023-09-06 12:50邢海涛梁威
软件工程 2023年9期
关键词:定速巡航
邢海涛 梁威

关键词:定速巡航;MPC;Simulink
中圖分类号:TP391.9 文献标志码:A
0 引言(Introduction)
各种辅助驾驶技术的出现,使得汽车的行驶更加安全高效。自动驾驶汽车的自动紧急制动、前后碰撞预警、变道辅助、盲区检测、自适应巡航和车道居中保持等功能的实现都依赖于汽车软件的控制[1-7]。其中,MPC算法可以单独使用进行轨迹控制,或者用于提升汽车控制的稳定性和抗干扰性,也可以结合模糊控制用于汽车的路径跟踪[8-12]。
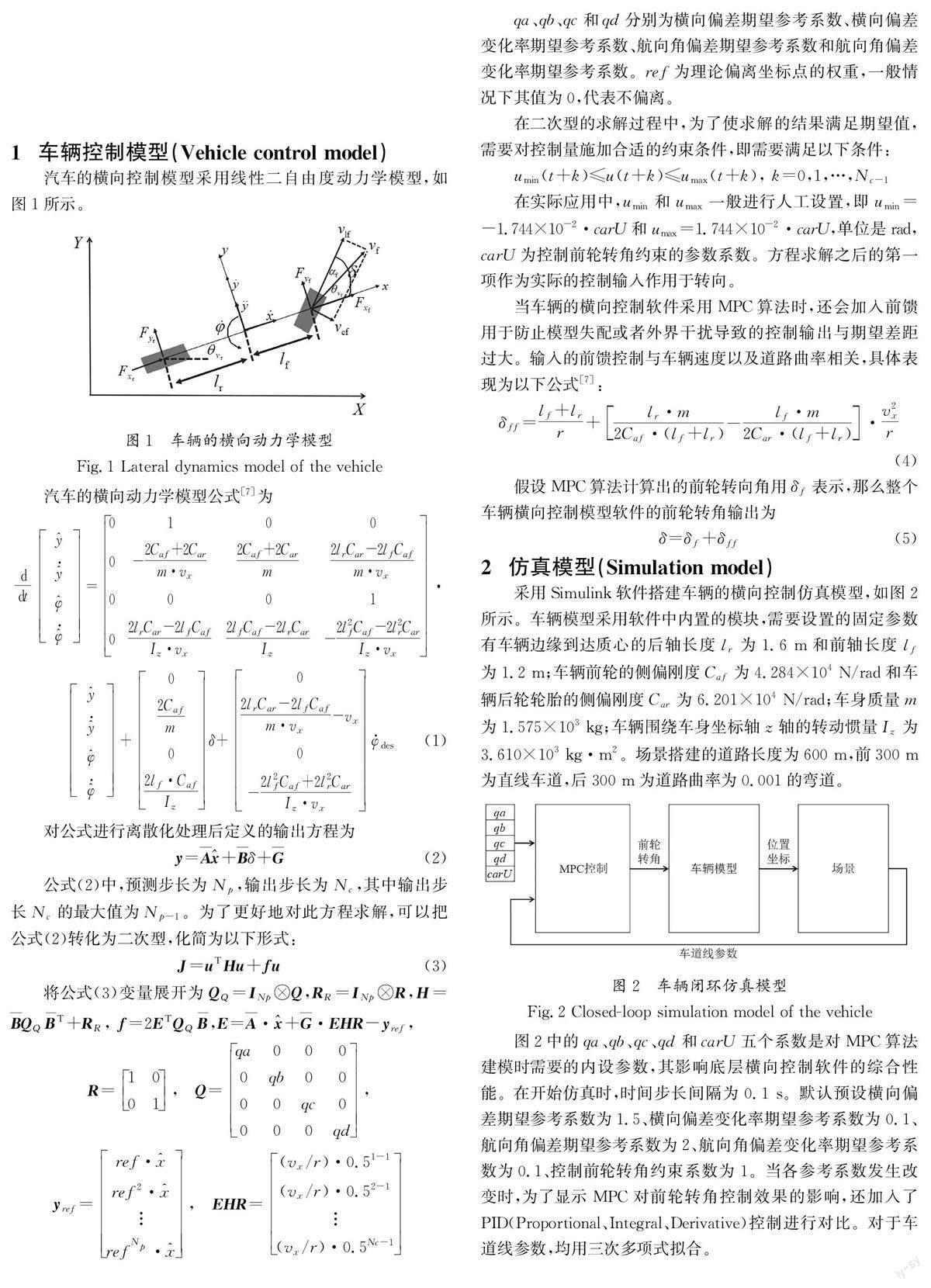
汽车底层的控制软件直接与汽车的硬件相关联,并在汽车行驶途中计算出理想的前轮转角角度,用于控制汽车的方向盘转动,控制软件性能对汽车的安全行驶具有重要影响;而软件的性能又是由算法中不同参数共同决定的,所以本文采用Simulink软件建立汽车横向控制模型,着重分析车辆动力学MPC算法中不同参数对车辆控制性能的影响。
3 结果与讨论(Results and discussion)
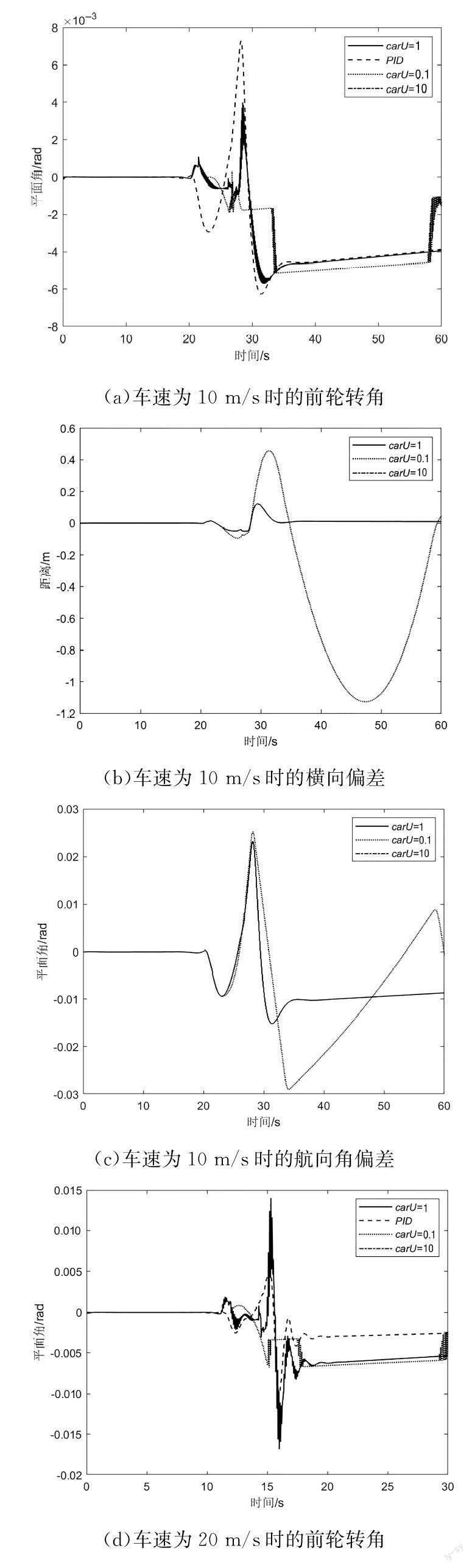
如图3所示,其中曲线图为只改变控制前轮转角约束系数大小时的仿真结果。如图3(a)、图3(b)和图3(c)所示的汽车设置车速为10 m/s,如图3(d)、图3(e)和图3(f)所示的汽车设置车速为20 m/s。
如图3(a)所示的前轮转角结果图中,PID控制的前轮转角突变为最大,在同一时刻的峰值是其对应的MPC控制的前轮转角约束系数为1的峰值的2倍左右。当车辆处于直道或者处于弯道时,PID控制和MPC控制效果差别不大。当控制前轮转角约束系数缩小到原来的1/10时,在图3(a)中能够清晰地看到前轮转角的转动范围变小。仿真曲线在直道上表现良好,但进入弯道后会在一个极短时间内有一个巨大的突变,表现为车辆方向盘的抖动以及车身的横向摇摆,此摇摆会极大地影响车内驾驶人员的驾乘感受,并且增大车辆失控的风险。从图3(b)和图3(c)中也能够明显地看出,当控制前轮转角约束系数缩小到原来的1/10时,汽车由直道进入弯道后,车辆的横向偏差和航向角偏差会变大,导致车辆处在弯道时出现横向偏移现象。当控制前轮转角约束系数放大10倍时,观察图3(a)、图3(b)和图3(c)的曲线没有明显的变化,即代表控制前轮转角约束系数放大时不会对车辆控制效果产生明显的影响。
当把车辆的速度设置为20 m/s时,以同样的条件改变控制前轮转角约束系数的大小,结果如图3(d)、图3(e)和图3(f)所示。此时,PID控制和控制前轮转角约束系数为1的MPC控制效果差别不大,并且在车辆进入弯道后,PID的控制效果比MPC的控制效果要好得多,其能够快速地收敛,趋近于0。当控制前轮转角约束系数缩小到原来的1/10时,其出现了与图3(a)相同的变化,并且有两次短时间的巨大突变,表现为车辆方向盘抖动两次以及发生两次车身横向摇摆,但是抖动和摇摆幅度小于图3(a)曲线的变化幅度。图3(e)和图3(f)中的峰值也不如图3(b)和图3(c)的大。当控制前轮转角约束系数放大10倍时,仿真结果与车速为10 m/s时的曲线一样,没有明显的差别。
如图4所示,曲线变化为只改变横向偏差期望参考系数大小时的仿真结果。
如图4(a)所示的前轮转角结果图中,PID控制的前轮转角峰值依旧最大。横向偏差期望参考系数为1.5时,为初始的默认值,将横向偏差期望参考系数更改为1时,可以观察到其峰值明显比横向偏差期望参考系数为1.5时要小,但其收敛进入稳定状态的速度要慢得多,并且会在直道行驶的末端,进入弯道之前出现极短时间前轮转角突变的现象,但幅度不大,表现出一定的横向偏移现象,从图4(b)中也可以明显地看到横向偏差期望参考系数为1时,车辆的横向偏差最大。当增大横向偏差期望参考系数为2时,可以看到其峰值相比横向偏差期望参考系数为1.5时明显变大,但是其收敛的速度要快速一些。如图4(c)所示,减小横向偏差期望参考系数值,航向角偏差峰值减小,收敛变慢;增大横向偏差期望参考系数值,收敛速度增快。
当把车辆的速度设置为20 m/s时,以同样的条件改变横向偏差期望参考系数的值。图4(d)出现的曲线变化与图4(a)大致相同,但其车速的增大,使得比横向偏差期望参考系数为1时的前轮转角出现突变现象的幅度要大一些,即横向偏移远一些。仿真曲线收敛速度慢,在整个阶段的曲线波动要比其他情况稳定一些,如图4(f)所示。横向偏差期望参考系数为2时,虽然收敛速度快,但是增加了车身的不稳定性,图4(d)、图4(e)和图4(f)中的曲线会出现振荡现象。
如图5所示,其中曲线变化为只改变横向偏差变化率期望参考系数大小时的仿真结果。
如图5(a)所示的前轮转角结果图中,横向偏差变化率期望参考系数为0.1时为初始的默认值。更改横向偏差变化率期望参考系数为0.05,可以看到图5(a)、图5(b)和图5(c)中曲线均出现了振荡现象且曲线也有一定的超调。更大的横向偏差变化率期望参考系数为0.15,其表现要比横向偏差变化率期望参考系数变小时更加稳定,对整个车身的控制也更加稳定,但是处在弯道时会一直存在一定的车身横向偏移现象。
当把车辆的速度设置为20 m/s时,以同样的条件改变横向偏差变化率期望参考系数时,无论是增大还是减小,均会出现超调和振荡现象,所以在车辆高速行驶时,需要慎重调整此参数的大小。
如图6所示,其中曲线变化为只改变航向角偏差期望参考系数大小时的仿真结果。
如图6(a)所示的前轮转角结果图中,航向角偏差期望参考系数的值为2时为初始的默认值。无论增大还是减小此参数,其前轮转角和航向角的曲线相差无几,不同之处在于横向偏差。当将航向角偏差期望参考系数减小为0.1时,其横向偏差曲线的峰值会变大,但是其在弯道的偏差值最终将变为0;当增大航向角偏差期望参考系数为10时,其横向偏差曲线的峰值会明显降低,但是其处在弯道行驶的车辆会有一定的横向偏移。
把车辆的速度设置为20 m/s時,以同样的条件改变航向角偏差期望参考系数。当航向角偏差期望参考系数增大为10时,除了横向偏差曲线的峰值会降低,还会看到曲线出现明显的振荡现象,如图6(d)、图6(e)和图6(f)所示,此时意味着车辆行驶途中对车身的控制非常不稳定。当减小航向角偏差期望参考系数时,仿真曲线的表现与车速设置为10 m/s时一致。
如图7所示,其中曲线的变化为只改变航向角偏差变化率期望参考系数大小时的仿真结果。当车速为10 m/s时,增大航向角偏差变化率期望参考系数,其对应的横向偏差和航向角偏差的峰值会变大;而减小航向角偏差变化率期望参考系数,其变化幅度不大。当车速为20 m/s时,增大航向角偏差变化率期望参考系数,其曲线会出现振荡现象,如图7(d)、图7(e)和图7(f)所示,意味着车身控制不稳定;而减小航向角偏差变化率期望参考系数时,仿真曲线的表现与车速为10 m/s时的情况相同。
从图3、图4、图5、图6和图7可知,突变均发生在直线车道200m处。分析其原因可知,是车道线的三次多项式拟合引起的。三次多项式在进行车道线拟合时,是对车辆摄像头和雷达可视范围内的整个车道线进行拟合,其拟合的系数受整个车道线的整体影响。当车辆在直线车道时,三次多项式拟合的车道线系数的三次项系数和二次项系数均趋近于0;一次项系数受汽车的航向角影响,只有当车辆前进方向和车道线平行时,值为0;在正常行驶的情况下,只有常数项不为0。当直线车道的末端为弯道时,车辆的摄像头和雷达检测到的车道线势必是一段直线段加一段圆弧线段组成的车道线,三次多项式对此进行拟合时,受圆弧车道线的影响,拟合出来的多项式系数势必与之前单纯的直线车道线不同,虽然此时车辆仍旧处于直线车道内,但是随着车辆越来越靠近弯道,拟合的4个系数与车辆在直线车道行驶时的拟合系数的差距越来越大,直到车辆完全进入弯道时才会逐渐恢复正常。
4 结论(Conclusion)
本文通过建立车辆横向控制的闭环仿真模型,模拟了车辆在车道上开启定速巡航功能时的情景,通过改变相应参数探究其对车辆的影响。基于该模型软件,研究人员对车辆横向偏差期望参考系数、横向偏差变化率期望参考系数、航向角偏差期望参考系数、航向角偏差变化率期望参考系数和控制前轮转角约束系数进行研究。通过闭环仿真实验发现,减小控制前轮转角约束系数值,会增加车辆的横向偏差和航向角偏差,进而增大车辆失控的风险;当道路的曲率改变时,轻微调整横向偏差变化率期望参考系数,增大航向角偏差期望参考系数和航向角偏差变化率期望参考系数会引起车辆横向偏差和航向角偏差曲线的振荡。以上研究表明,前轮转角约束系数是车辆开启功能后能否安全行驶的关键,而其他4个参数则可以极大地改善车辆的性能,适当对其进行调整,可以增强车辆行驶时车身的稳定性。
作者简介:
邢海涛(1997-),男,硕士生。研究领域:自动驾驶算法,汽车应用软件开发,声表面波的应用。
梁威(1985-),女,博士,副教授。研究领域:声表面波传感器与激发器的检测和控制。
猜你喜欢
客车技术与研究(2023年5期)2023-10-27
企业科技与发展(2021年9期)2021-10-12
农业装备与车辆工程(2021年4期)2021-05-05
内燃机与配件(2020年1期)2020-09-10
福建质量管理(2019年19期)2019-10-21
时代汽车(2019年7期)2019-08-06
石家庄职业技术学院学报(2018年6期)2019-01-18
环球市场(2018年19期)2018-09-10
汽车观察(2018年4期)2018-06-09
汽车与驾驶维修(汽车版)(2017年12期)2018-01-24
