洗出算法在控制补偿下的多通道结构优化
2023-09-11 08:41王辉裴聪
航空科学技术 2023年4期
王辉 裴聪
摘 要:飞行模拟器的模拟逼真度在一定程度上取决于经典洗出算法的参数好坏,而其参数固定、信号缺失等弊端使洗出运动存在相位失真、延迟和错误暗示等诸多问题,导致飞行模拟逼真度不足。本文设计了多通道变参数滤波器结合模糊控制器实时改变其固定的截止频率;引入带通滤波器将输入信号与平动高频、中频、低频信号差分后经过二次滤波补偿缺失信号;结合平动高频信号中掺杂少量的低频信号经过滤波、角度转换环节补偿洗出角位移。通过Simulink建模仿真对改进算法进行验证,结果表明,改进后的算法较经典洗出算法平台运动空间更大、持续加速度模拟度更高,优化了相位延迟、错误暗示等问题,提升了飞行模拟逼真度。
关键词:洗出算法; 飞行模拟器; 模拟逼真度; 变参数滤波器; 信号差分
中图分类号:TP391 文献标识码:A DOI:10.19452/j.issn1007-5453.2023.04.005
基金项目: 国家自然科学基金委员会与中国民用航空局联合资助项目(U1733128)
近日,国产大飞机C919成功完成取证试飞,标志着国内航空业的又一大进步,在国内航空业日益进步的前提下,飞行模拟器的持续创新研发在多角度考虑是非常必要的。而影响模拟飞行逼真度的一个重要因素是飞行模拟器的运动系统中的洗出算法。洗出算法是飞行模拟器运动系统的重要组成部分,它将飞机的实际飞行参数转化为六自由度平台的位姿信息[1]。目前洗出算法主要分为经典洗出算法、最优控制洗出算法以及协调自适应洗出算法三种,其中经典洗出算法被广泛应用[2-3]。
经典洗出算法由S.F.Schmidt和B.Conrad于1970年提出[4],并奠定了其发展基础。它具有结构简单、调节参数少、执行与反馈速度快等优点[5-6],但同时又带来参数固定、运动超限、相位延迟、感知误差大等缺点,诸多缺点会造成飞行模拟器逼真度不足。于是国内外诸多研究学者对经典洗出算法进行了更深入的研究和改进。其中R.V. Prrish等[7]首次提出自适应洗出算法,M.A.Nahon等[8]在此基础上提出混合自适应洗出算法,R.Sivan等[9]提出最优洗出算法。H.Asadi等[10-11]利用遗传优化算法和集成模糊逻辑控制器对经典洗出算法进行优化,减少了错误暗示和感知误差,但平台可能存在超限问题。国内王小亮等[12]以遗传算法和模糊控制来实现洗出算法滤波器参数的调整,增加逼真度,但人体感知加速度及感知加速度误差并未得到有效的改善。王辉、张保峰、刘伟超等[13-15]将感知误差引入模糊控制器进行洗出算法的结构优化,改善了信号丢失、相位滞后等问题,但對于人体感知加速度相位并未完全改善,提升较小。
针对以上经典洗出算法改进的优缺点,本文提出一种洗出算法多通道在控制补偿下的结构优化[16]研究方案:首先,引入带通滤波器与原信号、加速度高通、低通信号进行信号差分,再进行二次滤波以达到信号补偿的效果;其次,根据人体感知加速度、角速度误差及运动平台位姿余量,设计洗出算法三通道自适应滤波器,以达到控制补偿的效果。从而减小人体感知误差、相位延迟、错误暗示等问题,增大平台运动范围,使运动模拟逼真度、平衡度提高[17]。
1 经典洗出算法
1.1 经典洗出算法结构
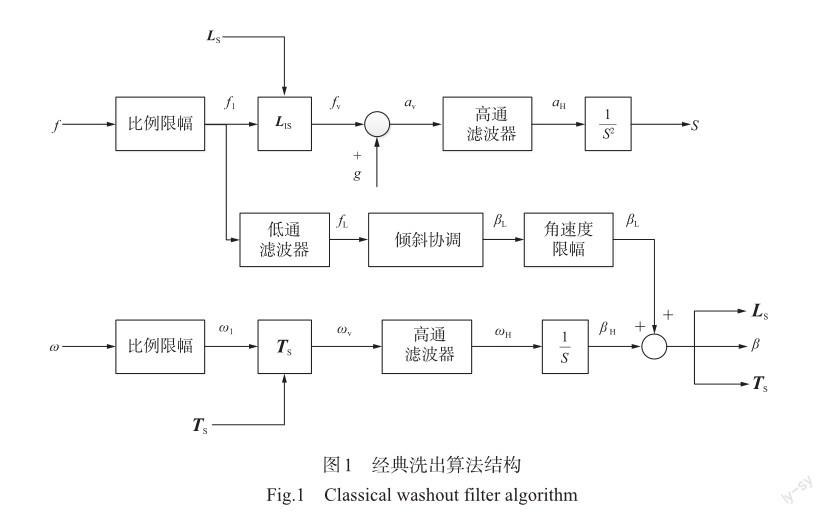
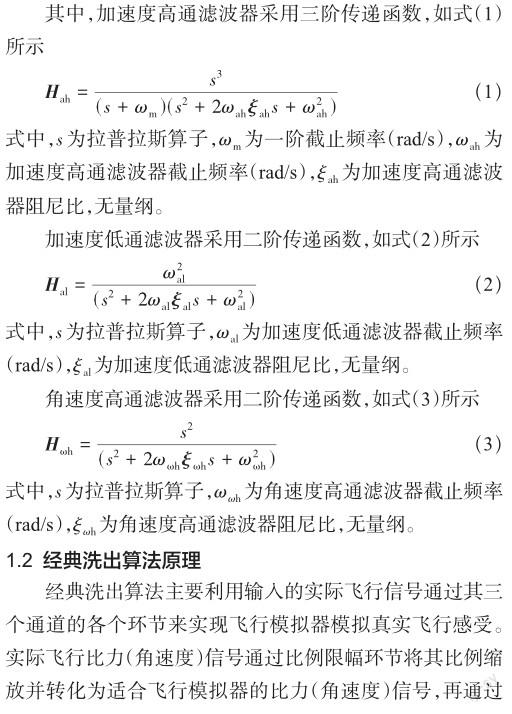
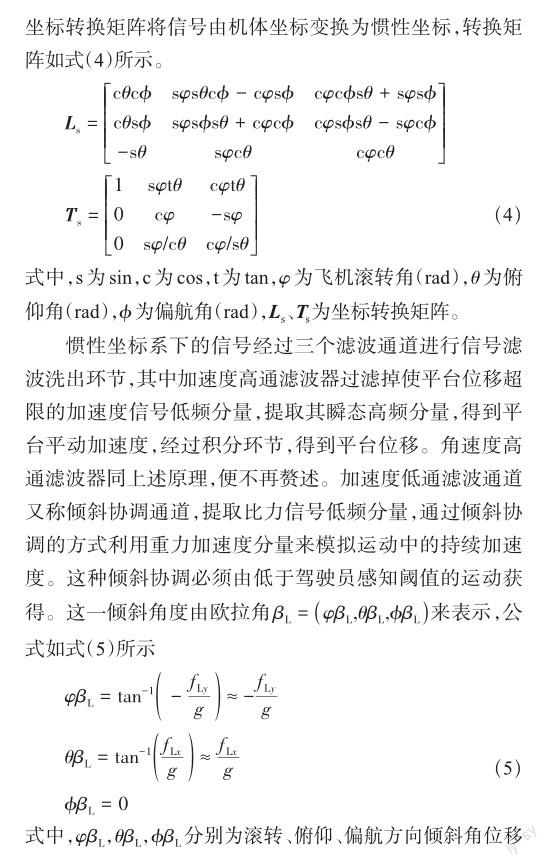
经典洗出算法如图1所示。其主要由比例环节、坐标转换矩阵、加速度高通滤波环节、加速度低通滤波环节、角速度高通滤波环节、倾斜协调模块、角速度限幅模块、积分环节等组成。三个滤波环节组成经典洗出算法的三个信号洗出通道。图中Ls、Ts为坐标转换矩阵。

2 人体前庭系统
由于飞行模拟器自身的局限性,其本身并不能完全复现飞机实际飞行的各种运动变化,所以要引入人体前庭系统来研究飞行模拟器的模拟逼真度。人体前庭系统由耳石和半规管组成。
2.1 耳石模型

3 多通道控制补偿下的洗出算法
3.1 改进洗出算法的结构设计
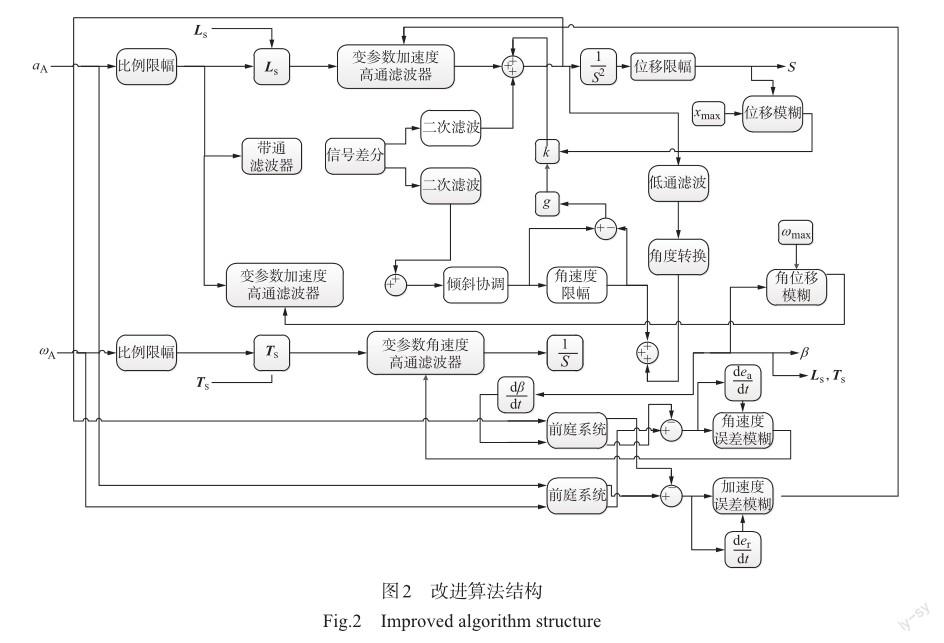
经典洗出算法具有参数固定、洗出信号缺失严重等缺陷,洗出后存在感知加速度相位延迟、错误暗示等问题,是导致飞行模拟器模拟逼真度不足的根本原因。针对这一系列问题以及在前人对洗出算法不断改进的基础上,为提高飞行模拟器的模拟逼真度,本文提出一种多通道控制补偿下的洗出算法结构优化,具体方案如下,改进后的洗出算法结构如图2所示。
(1) 为了解决经典洗出算法参数固定所带来的感知误差和错误暗示等问题,设计三通道变参数滤波器。滤波器截止频率分别由加速度误差、角速度误差,以及角位移误差模糊控制器控制输出确定。在输入加速度信号和人体感知误差时变情况下模糊控制器使三通道滤波器截止频率同时发生时变,达到自适应控制补偿效果,减小感知误差和错误暗示,提高模拟逼真度。
(2) 为了解决经典洗出算法洗出信号丢失所带来的相位失真、延迟等问题,引入带通滤波器。带通滤波器将原两加速度通道的模糊高、低两频段分为更细致的高、中、低三频段;采用输入原信号与加速度高通、带通、低通信号差分的策略,后再进行二次滤波,以达到加速度高通、低通两通道精确的高、低频信号补偿,提高模拟逼真度。
同时增设高通加速度通道中洗出不完全的少量低频信号,通过低频滤出及角度转换补偿到角位移中,角度转换原理与倾斜协调相同,此处不再赘述。
3.2 改进算法的模糊控制器设计
模糊控制原理的核心部分便是模糊控制器,它在模糊控制系统中起着至关重要的作用。模糊控制器最重要的即为其输入、输出变量,模糊隶属度函数和模糊规则的设计与调整。
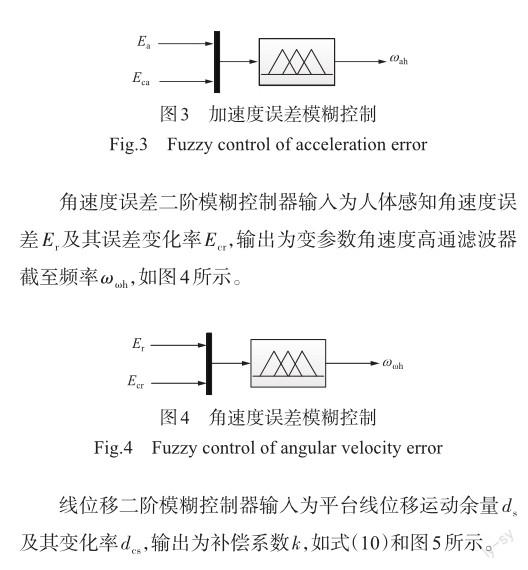
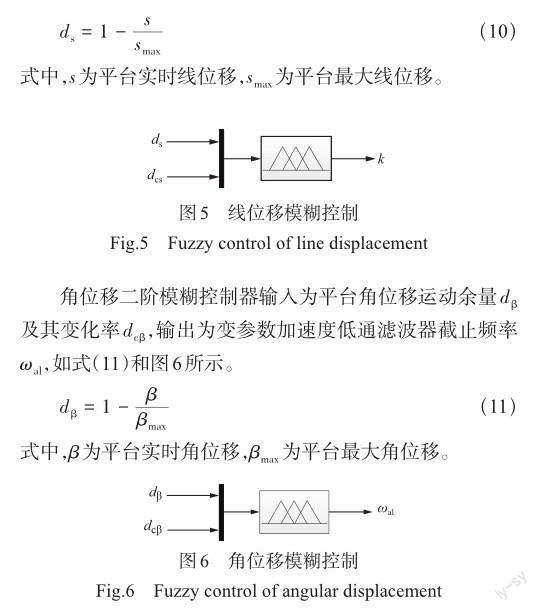
在本次设计中,均采用二维模糊控制器。三个通道的变参数滤波器截止频率均由不同的模糊控制器输出变量所确定。加速度误差二阶模糊控制器输入为人体感知加速度误差Ea及其误差变化率Eca,输出为变参数加速度高通滤波器截止频率ωah,如图3所示。
3.3 模糊规则设计
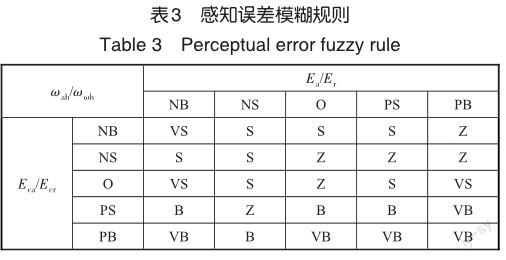
模糊规则的设计是设计模糊控制器的关键之处,包括输入、输出变量,各变量的模糊子集以及建立模糊规则。模糊规则中一般选用“大、中、小”来描述输入、输出的变量状态。所以本文将运动平台位移余量ds、dβ及其变化率dcs、dcβ的模糊子集划分为VS(很小)、S(小)、Z(中)、B(大)、VB(很大)5种情况,输出补偿系数k、截止频率ωal也如此;又因人的行为在正、负两个方向的判断基本上是对称的,将人体感知误差Ea、Er及其变化率Eca、Ecr划分为NB(负大)、NS(负小)、O(零)、PS(正小)、PB(正大)5种情况,输出截止频率ωah、ωωh同ωal划分。
模糊规则表的设计建立在误差变化下,当人体感知加速度误差Ea、人体感知角速度误差Er存在时,结合误差变化率Eca、Ecr的变化,为尽快消除误差并抑制其变大,需控制变参数加速度高通滤波器截止频率ωah、变参数角速度高通滤波器截止频率ωωh减小,以达到减小感知误差的效果,模糊规则见表3。
平台线位移运动余量ds结合其变化率dcs的变化,模糊控制输出合适的系数k为加速度高频通道获得实时的线位移補偿,在不超限的情况下增大平台线位移;通过平台角位移运动余量dβ结合其变化率dcβ的变化,控制变参数加速度低通滤波器截止频率ωal增大,减小感知误差,模糊规则见表4。

4 仿真分析
为了验证多通道控制补偿下的改进洗出算法仿真优化效果,本文以飞行坐标纵向方向为例进行仿真验证,其他方向同理,不再赘述。输入1~4s内为1m/s2的加速度脉冲信号,输入角速度信号为0,仿真时间15s,如图7所示。为了深层次地验证改进算法的效果,同时对经典洗出算法与遗传优化洗出算法建模仿真进行线、角位移、感知加速度及其误差对比验证。

图8为三种算法洗出线位移对比。可见改进后的算法线位移峰值为0.0314m,较经典洗出与遗传优化洗出分别提升了28%和101.7%,在不超限的情况下增大了平台平动范围,更有效地利用平台工作空间;且较经典洗出回中位达到系统稳态速度快,为平台下次运动洗出做出充足准备。

图9为三种算法洗出角位移对比。可见改进后的算法角位移峰值较经典洗出与遗传优化洗出分别提升了17%和10%,且未超过人体感知门限值,由于仿真输入角速度信号为0,洗出角位移完全由倾斜协调模拟持续加速度与角位移补偿所产生,改进算法在未被人体感知转动的条件下增大了平台角位移,进一步提高了平台持续加速度的模拟程度;改进后的算法较经典洗出算法回中位达到系统稳态速度快,为平台下次运动洗出做出准备。
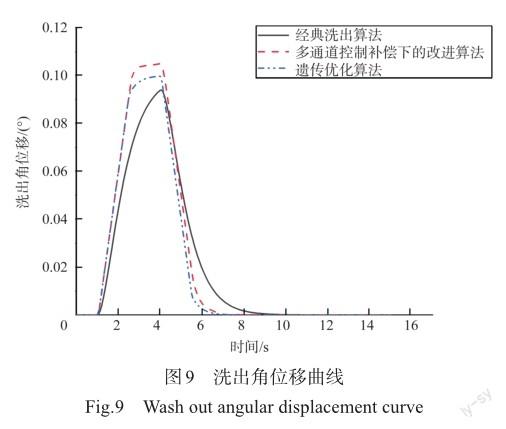
图10为三种算法洗出人体感知加速度对比。可见改进算法虽较实际人体感知曲线仍有一定的误差,但其在2.2s达到感知峰值,较经典洗出与遗传优化洗出达到感知峰值提前了1.8s,优化了相位延迟问题;且在1.4s时较两种算法无反向暗示问题,提升了模拟感知逼真度。
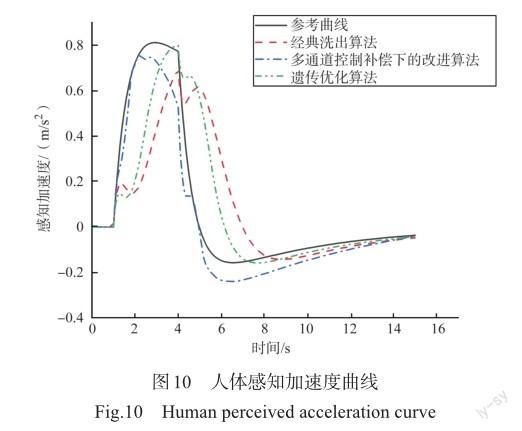
图11为三种算法洗出人体感知加速度误差对比。由图可见,改进算法感知加速度误差峰值绝对值为0.3m/s2,较经典洗出感知误差峰值绝对值0.64m/s2和遗传优化洗出感知误差峰值绝对值0.58m/s2分别降低了53%与48%,且无反向感知误差,一定程度上提高了模拟逼真度。
5 结论
通过对多通道控制补偿下的改进算法与经典洗出算法、遗传优化算法的仿真分析,对于经典洗出算法所存在的信号缺失、相位延迟、错误暗示等问题,本文讨论结果如下:
(1)采用三通道变参数滤波器结合模糊控制器实时控制其截止频率变化达到控制补偿的效果,洗出滤波器参数自适应,一定范围内降低了人体感知误差,使平台模拟逼真度更高。
(2)相较用遗传算法等优化算法单纯优化参数的改进,本文引入带通滤波器对损失信号差分补偿,高通通道掺杂低频信号对角位移补偿的改进方案使经典洗出算法得到有效的改善:在不超限的范围内提高了运动平台洗出线、角位移,增大了平台运动空间利用率;减小了错误暗示与相位延迟。
(3)本改进算法在实际应用中需结合平台试验与实际模拟情况进行验证,自适应截止频率参数等也需在应用中根据具体情况不断优化完善,以达最佳效果。

参考文献
[1]Casas C, Portalés C, Morillo P, et al. A particle swarm approach for tuning washout algorithms in vehicle simulators[J]. Applied Soft Computing, 2018, 68: 125-135.
[2]董彦良,许彩霞,唐建林,等. 六自由度平台的Washout滤波器设计及试验研究[J].机械工程学报,2010,46(3):53-58. Dong Yanliang, Xu Caixia, Tang Jianlin, et al. Design and test research of washout filter for 6-DOF platform[J]. Journal of Mechanical Engineering, 2010, 46(3): 53-58. (in Chinese)
[3]熊晓华,李维嘉.六自由度飞行模拟器体感模拟算法及仿真实现[J].系统仿真学报,2002(1):27-30. Xiong Xiaohua, Li Weijia. Proprioceptive simulation algorithm and the realization in 6-DOF flight simulator[J]. Journal of System Simulation, 2002(1): 27-30. (in Chinese)
[4]Schmidt S F, Conrad B. Motion drive signals for piloted flight simulators[R]. Technical Report NASA CR-1601, 1970.
[5]Kong X T, Zhu Y C, Di Y Q, et al. Methods to determine optimal washout position for single and multi-occupant motion simulator[J]. Cybernetics and Information Technologies, 2016, 16(1): 173-187.
[6]Romano R A. Motion control logic for large-excursion driving simulators[D]. Lowa: The University of Lowa, 1999.
[7]Prrish R V, Dieudonne J E, Martin D J. Coordinated adaptive washout for motion simulators[J]. Journal of Aircraft, 1975, 12(1): 44-50.
[8]Nahon M A, Reid L D, Kirdeikis J. Adaptive simulator motion software with supervisory control[J]. Journal of Guidance, Control, and Dynamics, 2012, 15(2): 376-383.
[9]Sivan R, Ish-Shalom J, Huang J K. An optimal control approach to the design of moving flight simulators[J]. IEEE Trans. Systems, Man and Cybernetics, 1982, 12(6): 818-827.
[10]Asadi H, Mohamed S, Nelson K, et al. Human perceptionbased washout filtering using genetic algorithm[M].Springer, 2015.
[11]Asadi H, Mohamed S, Nahavandi S. Incorporating human perception with the motion washout filter using fuzzy logic control[J]. IEEE/ASME Transactions on Mechatronics, 2015, 20(6): 3276-3284.
[12]王小亮,李立,張卫华.列车驾驶模拟器模糊自适应洗出算法研究[J].铁道学报,2010,32(2):31-36. Wang Xiaoliang, Li Li, Zhang Weihua. Research on fuzzy adaptive washout algorithm of train driving simulator[J]. Journal of the China Railway Society,2010, 32(2): 31-36. (in Chinese)
[13]王輝,柳颖涛.体感模拟算法在运动洗出中的优化[J].机械设计,2021,38(3):119-125. Wang Hui, Liu Yingtao. Research on optimization of the somatosensory simulation algorithm in motion washout[J]. Journal of Machine Design, 2021, 38(3): 119-125. (in Chinese)
[14]王辉,张保峰.飞行模拟器新型倾斜协调体感算法应用分析[J].重庆大学学报,2019,42(5):19-26. Wang Hui, Zhang Baofeng. Application analysis of a novel tilted coordination body sense algorithm for flight simulator[J]. Journal of Chongqing University, 2019, 42(5): 19-26. (in Chinese)
[15]刘伟超,王辉.飞行模拟器洗出算法多重滤波信号补偿优化研究[J/OL].系统仿真学报:1-8.(2022-10-04).http://kns.cnki. net/kcms/detail/11.3092.V.20211202.2048.004.html. Liu Weichao, Wang Hui. Research on multiple filter signal compensation for washout algorithm optimization of flight simulator[J/OL]. Journal of System Simulation: 1-8.(2022-10-04). http:// kns. cnki. net/ kcms/ detail/ 11. 3092. V. 20211202. 2048. 004. html.(in Chinese)
[16]张科施,凌圣博,韩忠华.跨声速运输机机翼气动/结构优化平台AeroStruct的发展及应用[J].航空科学技术,2022,33(4): 47-56. Zhang Keshi, Ling Shengbo, Han Zhonghua. Development and application of AeroStruct, an aerodynamic/structural optimization platform for transonic transport aircraft wings[J]. Aeronautical Science & Technology, 2022, 33(4): 47-56. (in Chinese)
[17]项松,吴承雨,赵为平,等.电动飞机螺旋桨动平衡试验研究[J].航空科学技术,2022,33(11):90-94. Xiang Song, Wu Chengyu, Zhao Weiping, et al. Experimental study on dynamic balance of electric aircraft propeller[J]. Aeronautical Science & Technology, 2022, 33(11): 90-94. (in Chinese)
Multi-channel Structure Optimization of Washout Algorithm Under Control Compensation
Wang Hui, Pei Cong
Civil Aviation University of China, Tianjin 300300,China
Abstract: The simulation fidelity of flight simulator depends on the parameters of classical washing algorithm to a certain extent. However, the disadvantages of fixed parameters and missing signal make washing motion have many problems, such as phase distortion, delay and false suggestion, which lead to the insufficient fidelity of flight simulation. A multi-channel variable parameter filter is designed to change its fixed cutoff frequency in real time with fuzzy controller. A band-pass filter is introduced to make difference between the input signal and the translational high frequency, medium frequency and low frequency signal, and then the missing signal is compensated by secondary filtering. In combination with the translational high frequency signal, the low frequency signal mixed with a small amount is filtered and the angle conversion link is used to compensate the angular displacement. The improved algorithm is verified by Simulink modeling and simulation. The results show that compared with the classical washing algorithm, the improved algorithm has larger platform motion space, higher simulation degree of continuous acceleration, optimizes the phase delay, error suggestion and other problems, and improves the fidelity of flight simulation.
Key Words: washout algorithm; flight simulator; simulation fidelity; variable parameter filter; signal difference