基于PLC矿用联轴器拆卸装置液压控制系统的设计
2023-09-14 05:43左学海张瑞平李城磊张虎虎
煤 2023年9期
左学海,张瑞平,文 彪,李 浩,李城磊,张虎虎
(1.山西大同大学,山西 大同 037003;2.山西省忻州市保德县王家岭煤业有限公司,山西 忻州 034000)
煤矿设备的正常运行和定期检修是煤炭开采的重要环节之一,煤矿生产企业及相关单位,每年对多种机电设备的检修的工作量很大,特别是一些大型机电设备在检修时,往往需要拆卸联轴器,由于联轴器直径较大,且与轴多为小过盈较紧配合或大过盈无键配合,因此拆卸困难,给煤矿生产及机电设备维修带来很多的损失[1]。目前在拆卸联轴器方面主要以人工为主,在自动化、智能化拆卸设备方面应用很少[2]。根据已有的拆卸方法,设计一种机电液一体化的拆卸装置,采用PLC作为控制器,用液压力作为驱动力,包括升降机构和拉拔机构。本设计采用温差-压力法来拆卸联轴器[3],即利用电磁感应加热联轴器外表面,使其孔受热膨胀,因此联轴器和轴之间的过盈量减小形成间隙;然后利用液压力将联轴器和轴分离完成拆卸。
1 矿用联轴器拆卸装置整体结构及工作原理
矿用联轴器拆卸装置由电磁感应加热部分、升降机构、拉拔机构、电器控制组成,共同完成矿用联轴器的拆卸。矿用联轴器拆卸装置整体结构如图1所示。
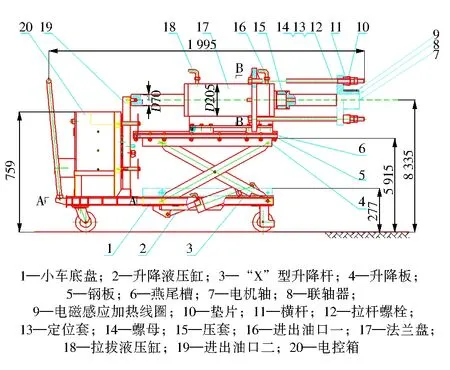
图1 矿用联轴器拆卸装置的整体结构图
电磁感应加热部分包括挠性线圈、电磁感应控制组、保温装置、抗杂波干扰装置、温度传感器等;在拆卸孔轴配合件过程中由于集肤效应的存在,加热采用中频加热;在加热过程中由于温度传感器,可以观察到加热部位的温度变化并及时调整加热温度;由于联轴器的形状及规格不同,因此采用挠性电磁感应线圈,在加热过程中将电磁感应线圈缠绕在联轴器上;电磁感应线圈上带有保温材料,防止因为外界温度变化而影响加热效率。
升降机构包括移动式升降小车、升降液压缸、“X”型升降杆、升降板等,移动式小车可以根据被拆卸联轴器的位置在地面上移动,小车后滑轮组带有刹车,防止拉拔过程中小车移动发生事故,升降液压缸带活塞杆的一端与“X”型升降杆相连,缸体固定在小车底盘上,“X”型升降杆一端与升降底盘相连,另一端与小车底盘相连。升降板固定在“X”型升降杆上,升降板上方固定拉拔液压缸。
拉拔机构包括拉拔液压缸、液压缸上的法兰盘、调节组件、压套。升降板上设有燕尾槽,燕尾槽上设有燕尾滑块,拉拔液压缸固定在燕尾滑块上,拉拔液压缸缸体可随燕尾滑块在燕尾槽上左右移动;调节组件包括4个拉杆螺栓,拉杆螺栓一端固定在联轴器上,另一端固定在法兰盘的4个长圆孔上,将被拆卸配合组件和拉拔液压缸连接起来;由于孔轴配合件的内置轴尺寸不同,因此可以定制不同规格的压套,压套套入拉拔液压缸右活塞杆上顶住孔轴配合件的轴。
电磁感应加热和液压系统的控制包括控制电磁感应线圈的加热温度、控制换向阀。通过接收到温度传感器的数据来控制电磁感应线圈加热的温度;通过控制换向阀来实现升降板的升降、拉拔液压缸的左右移动。
具体拆卸流程:将被拆卸组件置于工作台上,推动小车使其位于工作台前方,将压套套入拉拔液压缸右活塞杆上,将挠性线圈缠绕在联轴器外表面;按下启动按钮,升降板上升,当压套的中心线与轴中心位于同一直线上时,升降板停止上升;用垫圈、螺母将拉杆螺栓一端固定在法兰盘长圆孔的合适位置上,另一端固定在联轴器一端,将被拆卸配合组件和拉拔液压缸连接起来;按下加热按钮,挠性线圈开始加热联轴器外表面;给拉拔液压缸左腔进油,右活塞杆伸出带动压套紧紧顶住轴受到阻力,在此过程中,挠性线圈加热使联轴器与电机轴之间产生间隙,拉拔液压缸产生反作用力带动联轴器向左运动直至将联轴器和轴分离,卸下调节组件和联轴器;给液压缸右腔进油使液压缸归位;升降板下降使其回到初始位置。
2 矿用联轴器拆卸装置液压系统工作原理
2.1 拆卸力的确定
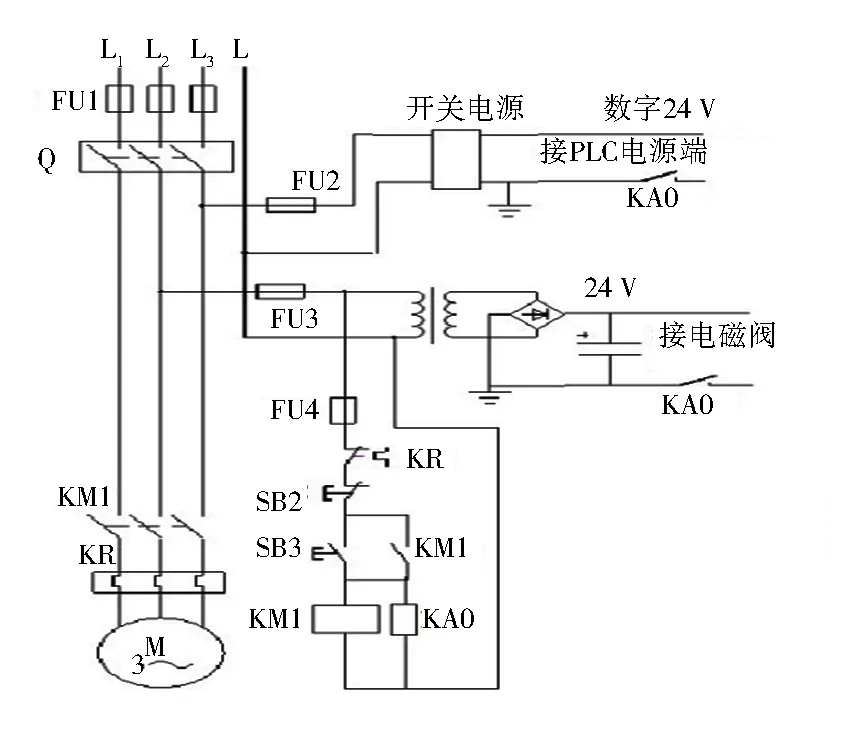
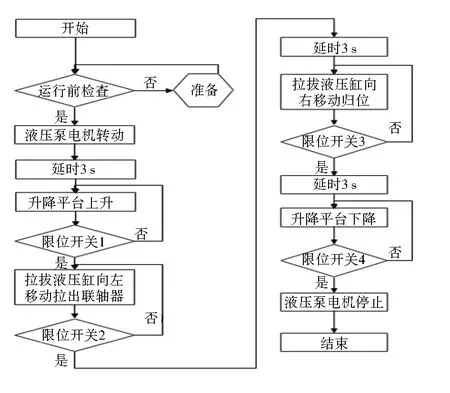
理论上,在矿用联轴器拆卸过程中所需要的拉力FL应与其装配时压入的力Fp一致。因该拆卸装置采用的是电磁感应加热法,使其联轴器和轴之间的过盈量减小产生间隙,因此拆卸所需的拉力减小,所以拆卸力应该在联轴器与孔之间的摩擦力Ff和装配力Fp之间,即:Ff 摩擦力计算公式: Ff=FG×f 式中:FG为矿用联轴器的重量;f为摩擦系数(钢对铸铁的摩擦系数为 0.15)。 拆卸矿用联轴器时的摩擦力:Ff=FG×f=49×10×0.15=73.5 N 装配力计算公式: 式中:L为配合面长度,mm;Ycmax为最大测量过盈量,μm;D是联轴器的直径,mm;d是联轴器轴的直径,mm. 装配联轴器时的装配力为:F压=141 kN.要考虑到联轴器的孔与轴生锈、变形等带来的阻力,取系数3.2,实际装配力为440 kN. 因此拆卸矿用联轴器时的拆卸力为:73.5 N 矿用联轴器拆卸装置液压系统由两个部分组成,分别为升降机构液压回路和拉拔机构液压回路,整部分液压系统由一套液压泵源供油,以液压力作为驱动力,使两个机构相互协调完成拆卸任务,矿用联轴器拆卸装置整体液压系统原理图如图2所示。 图2 矿用联轴器拆卸装置液压系统原理图 升降机构回路:升降平台上升的速度可以通过节流阀来调节;为了使升降平台保持在某一位置,在回路中串联单向阀,防止液体回流损坏器材[4];行程开关17、20是升降平台上升和下降的最高和最低限位。具体工作原理为:当1YA、2YA、3YA得到电时,二位四通电磁换向阀2换左位,二位三通电磁换向阀9换右位,二位二通电磁换向阀7换左位,压力油从泵口流出经过换向阀2的左位、换向阀9的右位、节流阀10、单向阀8,最后流入升降液压缸6的无杆腔。由于无杆腔油压大于有杆腔油压,升降液压缸6的活塞伸出,节流阀可以调节活塞的运动速度使升降平台平稳上升[5]。当触碰到行程开关17时,2YA失电,二位三通电磁换向阀9中位接通,升降平台停止上升泵卸荷,由于单向阀的存在液体不能回流,升降平台固定在上限位。 拉拔机构回路:为了实现双向运动,选用双杆活塞式液压缸[6],当拉拔液压缸左腔进油时,推动缸体向左运动;反正,当拉拔液压缸右腔进油时,缸体则向右运动;选用滑阀机能“M”型三位四通电磁换向阀,可以将液压缸锁紧,并且使泵卸荷减少能量的损耗,避免频繁的启停电机;通过节流阀可以调节拉拔液压缸运动的速度;行程开关18、19是拉拔液压缸左移和右移的最大限位。当升降平台上升到某一位置后,此时1YA失电、5YA得电,二位四通电磁换向阀2换中位,三位四通电磁换向阀4换右位,压力油从泵口流出经过换向阀2的中位、换向阀4的右位、节流阀12,最后流入拉拔液压缸5的左腔。液压缸带着联轴器向左移动,直至将联轴器拉出,当触碰到行程开关18时,5YA失电,拉拔液压缸停止左移。3 s后4YA得电,三位四通电磁换向阀4换左位,拉拔液压缸向右移动,当触碰到行程开关19时,4YA失电,三位四通电磁换向阀换中位,拉拔液压缸停止右移,拉拔液压缸归位[7]。 当拉拔工作完成和归位后,升降平台需要回到初始位置,3 s后3YA失电时,二位二通电磁换向阀7中位接通,升降液压缸6油液流入油箱。当触碰到行程开关20时,升降平台停止下降回到初始位置。 矿用联轴器拆卸装置液压系统技术参数表如表1所示。 根据各个机构的动作和各部分液压回路的原理,可以得到矿用联轴器拆卸装置液压系统的电磁铁动作逻辑表,如表2所示,表中“-”表示电磁铁失电,“+”表示电磁铁得电。 表2 电磁铁动作逻辑 矿用联轴器拆卸装置的电气控制系统原理图如图3所示。液压泵将油箱中的油液输入到系统中为系统提供动力,电路由主电路和控制电路组成。当开关SB3按下时,交流接触器KM1的线圈通电并自锁,电机启动,同时中间继电器KA0的线圈通电PLC上电。当开关SB2按下时,KM1和KA0的线圈断电同时电机停止转动、PLC停止运行。电路有短路、过载和过低压保护[8]。 图3 电气原理图 根据矿用联轴器拆卸装置液压系统原理图,设计出完整的矿用联轴器拆卸装置的动作流程图。拆卸工作完成之后矿用联轴器拆卸装置回到初始位置。动作流程如图4所示。 图4 整体动作流程图 1) 各个机构均处于原始状态,等待发出操作信号; 2) 液压泵驱动电机的启动,电机开始转动; 3) 定时器开始计时,3 s后升降缸伸出,升降平台缓慢上升,当触碰到限位开关1 h,停止上升; 4) 升降平台稳定后,给拉拔液压缸一腔进油使活塞杆向右移动顶住电机轴产生阻力,且在此过程中感应加热线圈加热使联轴器与电机轴之间产生 间隙,拉拔液压缸产生反作用力带动联轴器向左移动直至联轴器和轴分离,当触碰到限位开关2 h,停止左移; 5) 定时器开始计时,3 s后拉拔液压缸向右移动,当触碰到限位开关3 h,停止右移,回到拉拔工作开始时位置; 6) 定时器开始计时,3 s后升降缸缩回,升降平台缓慢下降,当触碰到限位开关3 h,停止下降,降到最开始的位置[9]。 通过PLC来控制液压系统,驱动矿用联轴器拆卸装置的各个机构顺序地动作,完成拆卸矿用联轴器的过程。整体装置实现了机电液一体化,具有良好的自动化水平,可以运用在煤矿上拆卸电机端、水泵段上的联轴器。该装置解决了拆卸力度大、拆卸难度高的问题,减少了工人的劳动强度,减少了对零件的损害,提高了拆卸效率。2.2 液压系统原理图


3 矿用联轴器拆卸装置控制系统的设计
3.1 控制系统原理图
3.2 控制系统动作流程
4 结 语
猜你喜欢
江苏安全生产(2021年5期)2021-07-16中学生数理化(高中版.高考理化)(2020年11期)2020-12-14中学生数理化(高中版.高考理化)(2019年3期)2019-04-25电子制作(2018年14期)2018-08-21电子制作(2016年19期)2016-08-24中学物理·高中(2016年8期)2016-08-08设备管理与维修(2016年7期)2016-04-23新疆钢铁(2015年3期)2015-11-08液压与气动(2015年6期)2015-04-16汽车科技(2015年1期)2015-02-28