一种全地形果实收获机的研制开发
2023-09-18 12:56张学军
农业开发与装备 2023年8期
张学军
(山西省农业机械发展中心,山西太原 030002)
1 研制全地形果实收获机的重要意义
作为世界第一大水果生产国,2019年,我国水果总产量已超过27400万t,约占全球产量的14%。然而,受限于分散栽培、分户管理的生产现状,真正集中成片统一管理的大型现代化果园仍然较少,果业生产依然停留在传统经验式的基础上,生产规模小、机械化水平低,特别是采摘环节,所用劳动力占整个生产过程的33%~50%。采摘作业季节性很强,人工采摘劳动强度大,作业效率低,尤其是在红枣、大杏等果实收获过程中,采用长杆对树枝进行击打的方式很容易使果实发生破损,严重影响果农收益[1-3]。
近年来,我国采摘机械迅速发展,涌现出了采摘器、动力剪枝采摘工具、多功能果园作业机械等多种作业机械,但整体呈现出功能单一,品种、区域适应性差的特点。国外采摘机械发展以采摘机器人为主,制造成本高,且不同区域使用时,需要反复安装拆卸,使用不便。随着水果种植业的持续发展,果园机械市场需求将进一步扩大,研制开发作业效率高,操作简单、移动方便,适应性强的全地形果实收获机械对于降低人工成本,增加果农收益,促进乡村振兴与我国现代果业的全程机械化发展具有重要意义[4-5]。
2 全地形果实收获机技术研究方案和技术路线
2.1 技术研究方案
2.1.1 全地形果实收获机
全地形果实收获机主要解决山区梯田、坡地等不同地形条件下果园人工采摘工作效率低、劳动强度大、果实损伤多、作业成本高的问题。该机结构主要包括固定架、环形骨架、推座、移动组件、斜撑组件、折叠架、折合组件和储料组件。
固定架的底部设置有移动组件,顶部设置有斜撑组件;环形骨架的侧端面焊接安装推座,推座通过螺栓安装在固定架上,环形骨架的另一侧两端通过转动销连接安装折叠架,顶部两侧端面以及折叠架的顶部端面均安装有折合组件,内侧端面中央设置有储料组件。
移动组件包括横梁架、移动支架、移动滚轮和推拉手柄。横梁架焊接安装在固定架之间,底部端面焊接安装移动支架,移动支架的底部端面之间安装移动滚轮,外侧与固定架之间焊接安装加强筋,推拉手柄焊接安装于固定架顶部。
斜撑组件包括卡合顶座、斜撑杆和锥形头。卡合顶座焊接安装于固定架顶部外侧,端面中央设有斜撑孔,斜撑孔内部插接安装斜撑杆,斜撑杆底部焊接安装锥形头。
环形骨架包括主安装架、折叠铰链和翻折支架。主安装架的两侧端面焊接安装折叠铰链,折叠铰链的另一侧焊接安装翻折支架。
折合组件包括轴承、合页销、折合伞架、转动轴、钢索、防脱扣和集线筒。若干个轴承固定安装在环形骨架的顶部端面两侧与折叠架的顶部端面中央,顶部安装合页销,合页销的顶部通过合页安装折合伞架,底部端面连接安装转动轴,转动轴的底部贯穿轴承。环形骨架的底部端面设置两个钢索,分别贯穿骨架顶部端面两侧转动轴的底部,防脱扣安装于折叠架的底部,折叠架端面的转动轴与防脱扣固定连接,集线筒通过螺钉安装在推座的底部中央,两根钢索插接安装于集线筒内部。折合伞架的端面中央设有挂接孔,挂接孔的外侧连接安装收料伞布。
推座的端面一侧通过螺栓安装收线电机,两根钢索均穿过集线筒与收线电机连接。
储料组件包括收纳架、焊接拉杆和布袋挂钩。收纳架安装于环形骨架的端面中央,顶部端面外侧焊接安装焊接拉杆,焊接拉杆的另一端与环形骨架的内侧焊接连接,收纳架的端面两侧焊接安装两个布袋挂钩(图1,图2)。
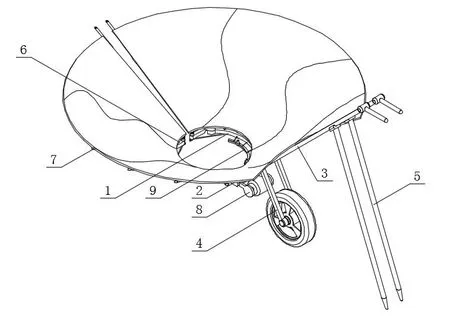
图1 全地形果实收获机整体结构示意图
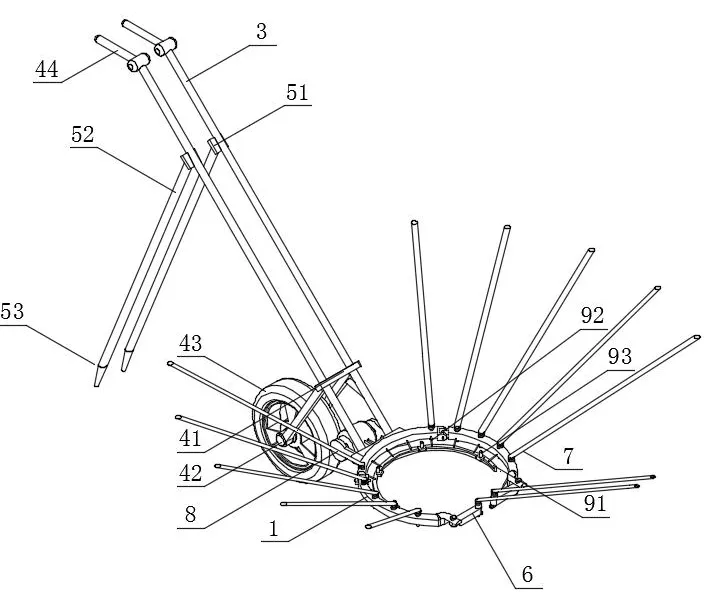
图2 全地形果实收获机局部结构示意图
2.1.2 捡拾机
捡拾机主要解决对散落地面果实进行快速拾取收集的问题。该机结构主要包括机架、轴杆、轮胎、拾取针、拨落器、从动轮、皮带、扶手、电机座、微型电动机、主动轮、油门把手和刹车手把。
轮胎通过轴杆安装于机架之间,外表面分布焊接拾取针,拾取针上方机架外侧安装杂质过滤风机,前侧焊接安装拨落器,轴杆的一侧安装有从动轮,机架上侧焊接安装扶手,扶手中部安装有电机座,电机座内部镶嵌安装微型步进电机,外部安装有主动轮,主动轮与从动轮之间使用皮带连接,扶手的顶端安装有油门把手与刹车手把,油门把手电性输出端与微型电机的电性输入端相连。机架前下侧悬挂安装储料框,后下侧焊接安装支架,支架的末端安装有万向轮(图3,图4)。

图3 捡拾机结构轴侧图
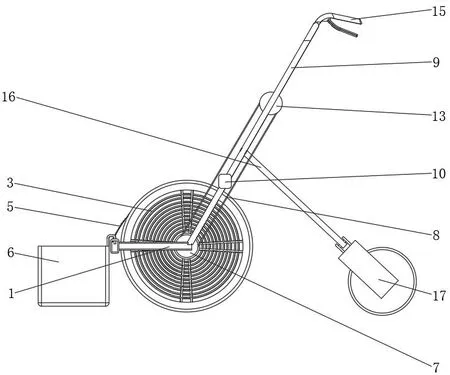
图4 捡拾机结构侧视图
2.2 技术路线
2.2.1 全地形果实收获机
作业时,将收料伞布通过挂接孔安装在折合伞架的顶部,握持推拉手柄,推动设备移动,到达工作位置后,调节环形骨架角度,通过折叠架顶部的折合组件将果树树干合围,将收纳袋挂接于收纳架端面的布袋挂钩上,通过斜撑组件对固定架进行支撑,转动折合组件,使整个收料伞布呈现倒伞状,使用振动器抖动果树树枝,使果实掉落,果实收集完成后,通过转动手柄使收料伞布闭合。
2.2.2 捡拾机
作业时,可以直接推动或启动电动机驱动设备移动,通过刹车手把控制设备启动和停止,通过油门把手调节设备前进速度,移动过程中,通过轮胎上的拾取针扎取果实,随着轮胎滚动,通过拨落器作用使扎取果实脱落滚动到储料框。拾取过程中,过滤风机向后吹风,避免树叶等杂质落入储料框。
设备整体作业流程为:移动合围→振动落果→果实收集→地面捡果→储运。
2.3 试验过程和试验结果
样机试制完成后,实地选取2个红枣园,围绕梯田地、坡地的实际作业效果,与人工采收进行了对比试验。试验设置机器组与人工组两个组,每组配备作业人员2名,作业对象均为约20年树龄的红枣树。
从表1、表2中可以看出,按一天工作6 h,平均每棵枣树产量30 kg,优质枣占比30%,单价1.4元/kg,损伤枣占比70%,单价0.8元/kg计算,梯田地机器组每天可以收获红枣树90棵,收益2 646元,坡地机器组每天可以收获红枣树84棵,收益2 469.6元,合计收益5 115.6元;人工组由于捡枣过于耗费时间,基于成本考虑,只捡拾优质枣,梯田地人工组每天可以收获枣树20棵,收益224元,坡地人工组每天可以收获枣树15棵,收益161元,合计收益385元,相差13倍。

表1 收集试验作业时间统计表

表2 捡拾试验作业量统计表
试验表明,全地形果实收获机可以实现采摘、收集、捡拾机械化,5 s内抖落果树单枝果实90%左右,果实收集伞满足90%以上树型和地况,收集率90%以上,果实优质率80%以上。与人工采摘相比,作业效率提高10倍以上,经济效率提高2倍以上,节省劳动力5人/天·台。
3 研究所解决的关键技术和技术创新点
3.1 解决的关键技术
本设备通过全地形果实收获机和捡拾机的合理化设计,能够实现对平原、山地等地形条件下生长果树的合围,通过电动振动器,减轻人工劳动强度,通过收集伞保护、收集掉落果实,通过捡拾机快速拾取地面果实。
3.2 创新点
本设备结构简单、操作方便,采用电池提供动力,能够满足山区、坡地等全地形条件下果实采收的需求,将有效提升中小型果园的机械化生产水平。
4 结论
全地形果实收获机的研制开发,有效解决了果园传统人工采收方式成本高、效率低、损伤果占比高且秋雨影响下被抛弃地头、丰产不丰收的问题,整体实现采摘效率提升15倍,直接经济效益提升2倍,节省劳动力5人/天·台的良好效果,将有力促进山西省水果种植业的进一步发展,对推动丘陵山区乡村产业振兴具有极大的市场推广价值。
猜你喜欢
橡塑技术与装备(2022年2期)2022-02-14
装备制造技术(2021年5期)2021-08-14
佛山陶瓷(2019年10期)2019-11-29
航空世界(2019年7期)2019-02-16
现代制造技术与装备(2018年3期)2018-04-24
科技创新与品牌(2017年3期)2017-04-27
新农业(2016年13期)2016-08-16
浙江大学学报(工学版)(2016年9期)2016-06-05
中国卫生标准管理(2015年4期)2016-01-14
时代农机(2015年3期)2015-11-14