NTSC时频比对中的Galileo E3总时延校准∗
2023-10-09 01:38董绍武武文俊王威雄宋会杰
天文学报 2023年5期
郭 栋 董绍武 武文俊 王威雄 宋会杰 王 翔
(1 中国科学院国家授时中心 西安 710600)
(2 中国科学院大学天文与空间科学学院 北京 100049)
1 引言
GNSS(Global Navigation Satellite System)时间传递是远距离高精度时间比对的主要技术之一[1]. 目前, 全球主要守时实验室都是以GPS(Global Positioning System)链路或GPS与卫星双向(Two-Way Satellite Time and Frequency Transfer, TWSTFT)组合作为正式时间传递链路参与国际标准时间(Coordinated Universal Time,UTC)的计算. 近些年, 随着Galileo和BeiDou等卫星导航系统的快速发展, 各守时实验室利用多模接收机可同时接收到多系统卫星的观测信号, 其时间传递性能倍受关注[2–5]. 为了提升时间传递链路的可靠性, 国际权度局(Bureau International des Poids et Mesures, BIPM)决定从2020年起将Galileo时间比对正式作为UTC计算的备份链路, 同时也在对BeiDou-3系统的时间传递性能进行评估.
时间传递链路所用设备的硬件时延是时间比对的主要误差来源. 为确保GNSS链路时间传递的准确性, 需要精确测定卫星信号从接收机天线相位中心到本地时频信号参考点间电路引起的硬件时延, 称为接收机总时延, 该时延与卫星信号频率有关[6–7]. 接收机总时延的校准方式主要包括直接校准和差分校准. 直接校准是通过使用卫星信号模拟器和矢量网络分析仪等设备测定接收机系统的各部分时延[8–9]. 美国海军实验室(Naval Research Laboratory, NRL)和法国航天局(Centre National d’Etudes Spatiales, CNES)曾使用不同的卫星信号模拟器对同一接收机GPS P1和P2码的系统时延校准, 校准不确定度分别为1 ns和0.6 ns[10].该校准方法比较复杂且所需设备昂贵. 差分校准是利用移动校准站与待校准接收机短基线共钟比对(Common Clock Difference, CCD)来确定其总时延. 2011年,BIPM提出了一种标准的接收机时延校准方案, 称为METODE (Measurement of Total Delay), 通过使用移动校准站将GNSS链路的校准不确定度从5 ns减小到1.5 ns[11]. 假若本地无移动校准站作为参考, 则可将两地间已校准链路的时间比对结果作为参考, 通过未校准链路的比对结果可间接求得待校准接收机的总时延. 另外, 校准后的接收机还可用于传递UTC-UTC (K)和依靠UTC (K)对GNSST (Global Navigation Satellite System Time)进行时差监测, 其中K为参与UTC计算的守时实验室简称.
在2021年BIPM发布的GNSS接收机校准指南V4.0中规定: 从2021年6月开始增加对各守时实验室接收机Galileo E3 (Galileo E1&E5a)总时延校准. 当前, 欧洲许多重要的守时实验室均已完成接收机Galileo E3总时延的校准, 故其他待校准区域可与其建立Galileo E3时间比对链路, 以两地间已校准链路的比对结果为参考间接求得待校准接收机Galileo E3总时延. 本文以德国PTB (Physikalisch-Technische Bundesanstalt)与中国NTSC (National Time Service Center)间GPS P3共视(Common View,CV)比对结果为参考,利用PT09和NTP 3接收机分别对NT02和NT05两台不同型号接收机Galileo E3总时延校准并分析其校准不定度. 最后, 对NT02、NT05接收机Galileo E3总时延的校准结果进行了验证.
2 Galileo E3总时延校准原理
目前全球各守时实验室的GNSS接收机几乎完成了对GPS P3 (P1&P2)总时延的校准, 因此可将两守时实验室间GPS P3链路的时间比对结果作为参考, 通过Galileo E3链路间接求得待校准接收机Galileo E3总时延, 校准原理如图1所示. 图中1PPS (Pulse Per Second)定义为秒脉冲, ANT表示接收机天线, 详细校准步骤如下.
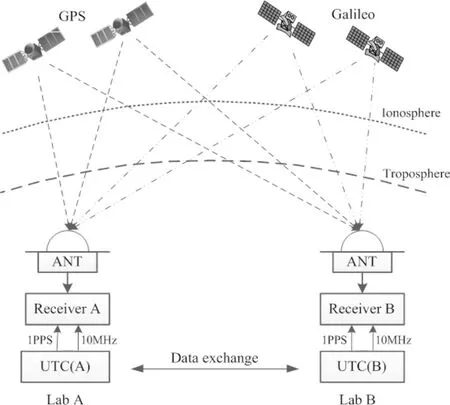
图1 Galileo E3总时延校准原理Fig.1 Calibration principle of Galileo E3 total delay
假设位于A、 B两守时实验室的多模接收机RA、RB均已校准GPS P3总时延, 且分别接入本地参考UTC(A)和UTC(B)输出的时频信号并进行同步观测. 将RA设为参考站, RB为待校准站, 其中RA的Galileo E3总时延已校准.
(1)在A实验室, 通过对任一历元接收的某颗GPS卫星P1和P2码双频无电离层伪距组合观测数据处理可求得其接收机钟差为[9,12]:
式中, TRA,G为利用GPS卫星观测值解算的RA接收机钟差, 其下标A为实验室简称, G代表GPS系统.C表示真空中的光速,PIF为GPS双频无电离层组合观测值,分别表示卫星和接收机天线在国际地球参考框架下的三维坐标,‖ . ‖表示向量的模,S为与地球自转有关的Sagnac改正,∆trel为卫星钟的相对论效应改正, ∆tsat为GPS卫星钟相对其系统时间GPST (Global Positioning System Time)的时差, ∆ttrop为对流层折射引起的信号时延, GD为星上设备时延[13–15]. 由(1)式解算的接收机钟差中未扣除接收机GPS P3总时延,则UTC(A)与GPST间的时差可表示为:
上式中, UTC(A)为UTC在A实验室的物理实现;TOTDLYA,G为接收机RA的GPS P3总时延.
(2)在B实验室, 依照(1)–(2)式对在相同历元RB接收的同一颗GPS卫星的双频无电离层伪距组合数据处理可以得到UTC(B)与GPST的时差为:
(3)根据GNSS共视比对原理[16–18], 由(2)–(3)式可求得任一历元UTC(A)与UTC(B)间GPS共视比对结果为:
式中, 下标k表示在任一历元A、B两实验室共视到的第k颗GPS卫星,n为共视卫星总数,ωk为用第k颗共视卫星计算的钟差结果所占的权重, 权重之和为1.
(4)重复步骤(1)–(3), 通过对相同时段内RA和RB接收到Galileo卫星的E1和E5a双频观测数据处理可求得UTC(A)与UTC(B)间Galileo E3共视比对结果为:
式中下标E代表Galileo系统, 其他参数的定义同上.
(5)由于RA接收机Galileo E3总时延已知, 故将其与(4)–(5)式计算的同一时段内UTC(A)与UTC(B)间GPS P3和Galileo E3链路的共视比对结果代入(6)式中即可求得待校准接收机RB的Galileo E3总时延:
3 校准结果及不确定度分析
3.1 校准结果
由于参与UTC计算的各守时实验室都是通过与PTB建立时间比对链路进而取得联系, 因此可选已校准GPS P3和Galileo E3总时延的PT09接收机为参考站, 分别对NT02和NT05的Galileo E3总时延进行校准. 由于NT02和NT05的GPS P3总时延未校准, 故需先借助NTSC已校准GPS P3总时延的NTP3接收机通过共钟差分校准的方式确定其时延, 然后分别以PT09与NT02和NT05间GPS P3链路的共视比对结果为参考, 通过计算其Galileo E3链路的共视比对结果间接求得NT02和NT05的Galileo E3的总时延. 本次试验使用的接收机信息如表1所示.
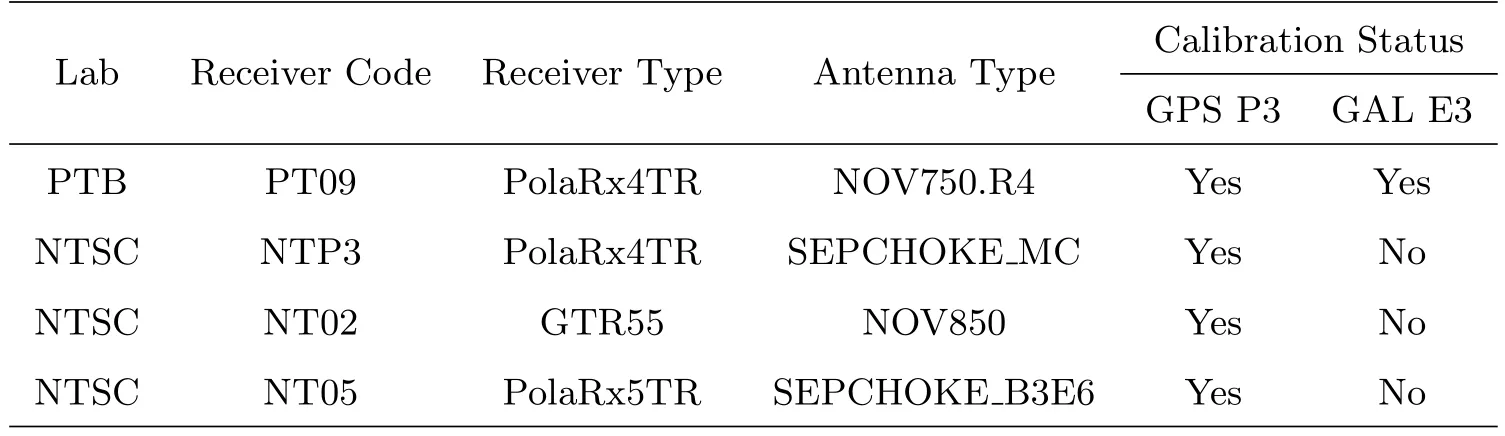
表1 接收机配置信息Table 1 Configuration information of receivers
取NT02、NT05和NTP3接收机从2021年10月1日至2021年10月31日(即简化儒略日(Modified Julian Day, MJD) 59488–59518)生成的RINEX (Receiver Independent Exchange)观测文件,利用(1)式对文件中GPS P1、P2码双频无电离层组合观测数据处理获得接收机钟差, 并根据国际时间频率咨询委员会(Consultative Committee for Time and Frequency, CCTF)最新制定的扩展版GNSS时间传递标准(Common GNSS Generic Time Transfer Standard Version2E, CGGTTS V2E)生成标准共视文件, 详细过程参考文献[9].图2、图3分别给出这3台接收机在NTSC的连接图及其天线位置分布. 根据GNSS共视比对原理可求得NTP3与NT02和NT05间GPS P3链路的共钟比对结果, 如图4所示.

图2 NTSC接收机连接图Fig.2 The connection diagram of receivers in NTSC
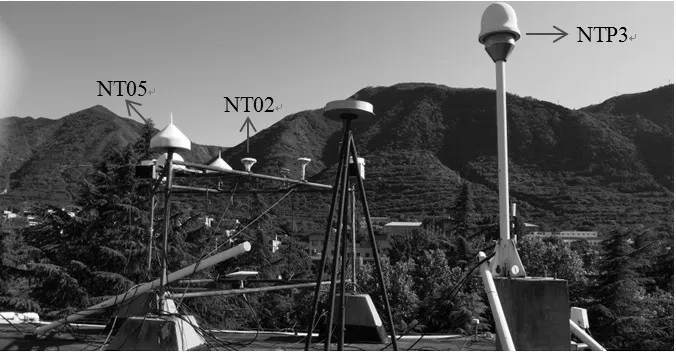
图3 NTSC接收机天线位置的分布Fig.3 The positional distribution of antenna receivers in NTSC
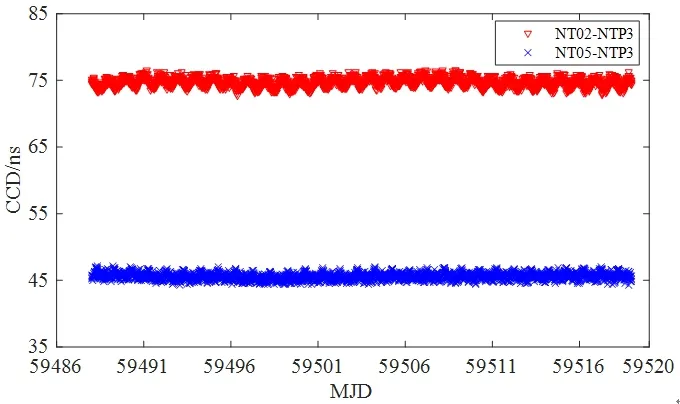
图4 GPS P3共钟比对结果(未校准)Fig.4 CCD of GPS P3 (Uncalibrated)
NTP3接收机GPS P1、P2码观测信号从接收机天线相位中沿天线线缆到接收机内部参考点,再到UTC(NTSC)信号参考点间的各部分时延已于2016年6月由BIPM巡回校准测定, 故根据双频无电离层组合公式可求得其GPS P3总时延. 由于NT02和NT05未校准GPS P3总时延, 故在图4中可明显看出GPS P3链路的共钟比对结果均不在零值附近, 存在明显的系统偏差, 且NT02与NTP3比对链路存在明显的周日效应. 为减小周日效应和伪距观测噪声等随机误差的影响, 以该时段内共钟比对结果的零偏均值作为NT02与NT05 GPS P3总时延, 分别为75.6 ns和45.6 ns, 扣除该项时延后与NTP3共钟比对的结果如图5所示. 由图5可看出,NT02和NT05与NTP3的共钟比对结果均在零值附近, 零偏均值分别为0.12 ns和0.01 ns, 而且有效改善了NT02与NTP3比对链路的周日效应.
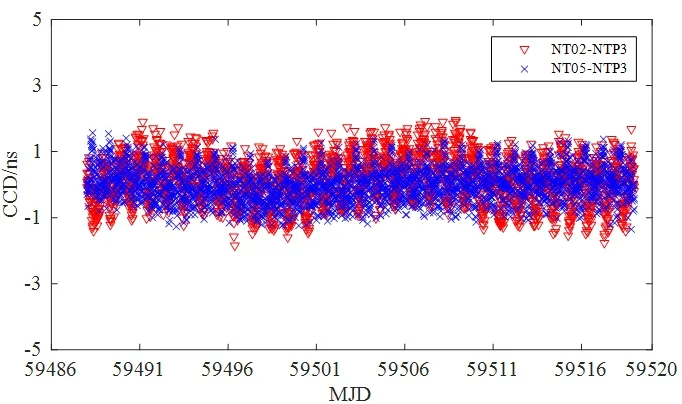
图5 GPS P3共钟比对结果(校准后)Fig.5 CCD of GPS P3 (Calibrated)
取NT02、NT05和PT09接收机2021年10月1日至2021年10月31日(MJD: 59488–59518)期间的RINEX观测文件, 并根据CCTF制定的时间传递标准生成GPS P3和Galileo E3标准共视文件, 图6和图7分别给出NT02和NT05与PT09间GPS P3和Galileo E3链路的共视比对结果.
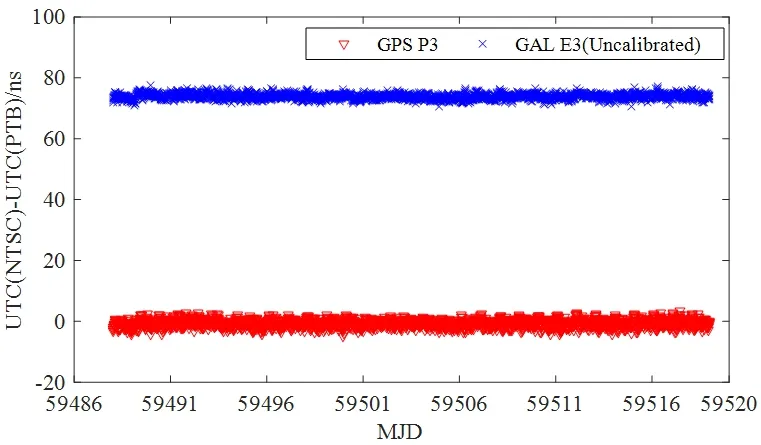
图6 NT02与PT09共视结果(未校准)Fig.6 Comparison result of CV between NT02 and PT09(Uncalibrated)

图7 NT05与PT09共视结果(未校准)Fig.7 Comparison result of CV between NT05 and PT09(Uncalibrated)
由于NT02和NT05接收机尚未校准Galileo E3总时延, 故图6、图7中GPS P3与Galileo E3共视比对结果中存在明显的系统偏差. 分别以NT02和NT05与NTP3间的GPS共视比对结果为参考, 根据Galileo E3总时延校准原理可求得在该时段内各历元NT02和NT05接收机Galileo E3总时延, 取其均值作为两接收机Galileo E3总时延, 分别为74.6 ns和46.5 ns.
图8、图9分别给出NT02和NT05接收机扣除Galileo E3总时延后与PT09间GPS P3和Galileo E3链路的共视比对结果, 可明显看出两条链路的共视比对结果一致性较好. 以GPS链路的比对结果为参考, 相同时刻Galileo E3与GPS P3链路比对结果的差值均值分别为-0.01 ns和0.04 ns.

图8 NT02与PT09共视结果(校准后)Fig.8 Comparison result of CV between NT02 and PT09(Calibrated)
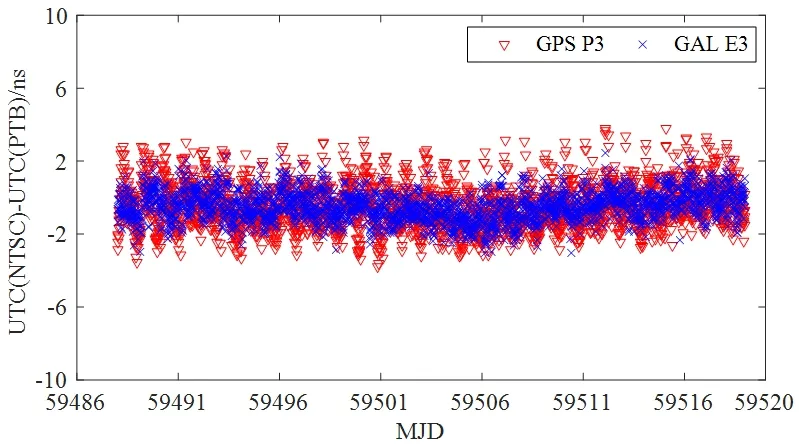
图9 NT05与PT09共视结果(校准后)Fig.9 Comparison result of CV between NT05 and PT09(Calibrated)
3.2 校准不确定度分析
在对NT02和NT05接收机Galileo E3总时延校准过程中, 由于受参考接收机NTP3、PT09总时延校准误差和各接收机观测误差等因素的影响, 导致两台接收机Galileo E3总时延的校准结果具有不确定性, 称校准不确定度. 接收机校准不确定度越小,其校准结果越可靠.
接收机校准不确定度是由若干个分量组成, 其中一些分量需通过一系列观测数据统计分析来评定, 称为统计不确定度; 另一些分量是基于经验或其他信息所认定的概率分布来评定, 称为系统不确定度[19–20], 总不确定度U的计算公式为:
其中UT为统计不确定度,US为系统不确定度.M、N分别为统计不确定度和系统不确定度分量总数.
表2和表3分别列出了NT02和NT05接收机Galileo E3总时延校准的不确定度分量. NTP3接收机的GPS观测数据于2017年7月正式用于UTC的计算, 初始校准不确定度为1.7 ns. 截止2021年10月,在BIPM公布的第406期Circular-T中NTP3由老化引起的不确定度为2.2 ns, 则其GPS P3总时延校准不确定度为2.8 ns. 由于NT02、NT05接收机GPS P3总时延是通过NTP3以共钟差分校准的方式测定的, 故其校准不确定为2.8 ns.
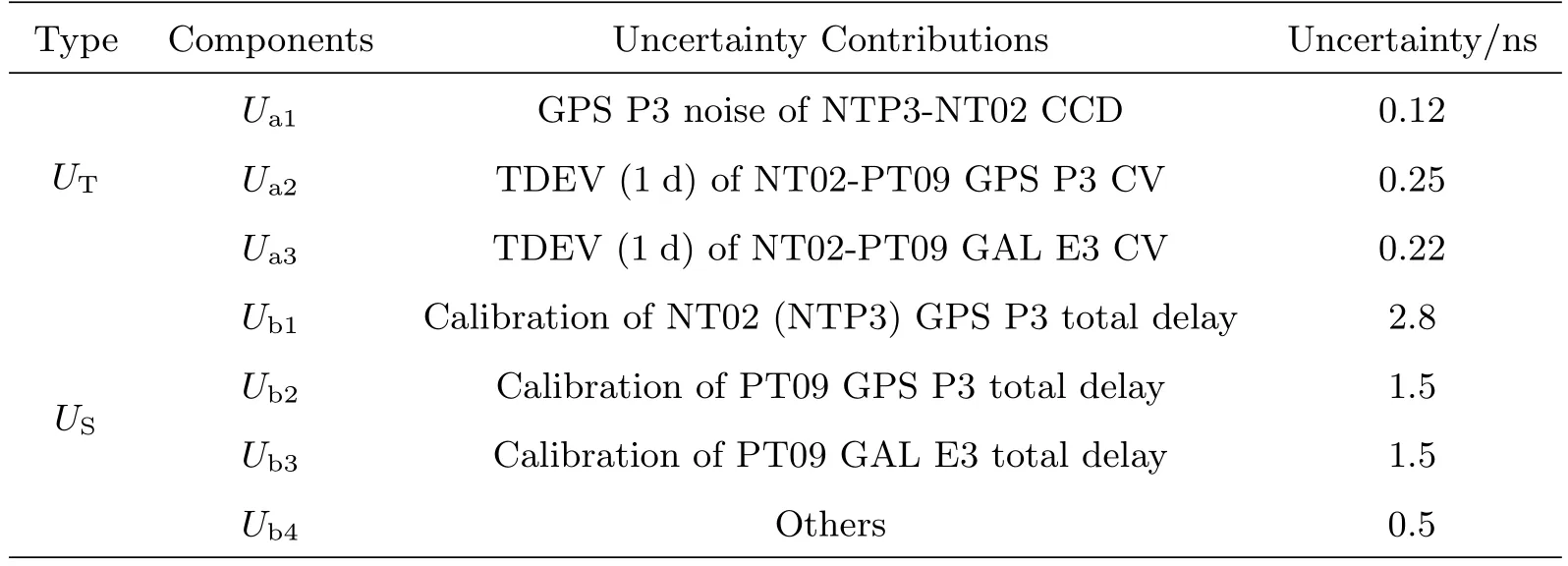
表2 NT02 Galileo E3信号总时延校准不确定度分析Table 2 Uncertainty analysis of total delay calibration of NT02 Galileo E3 singal
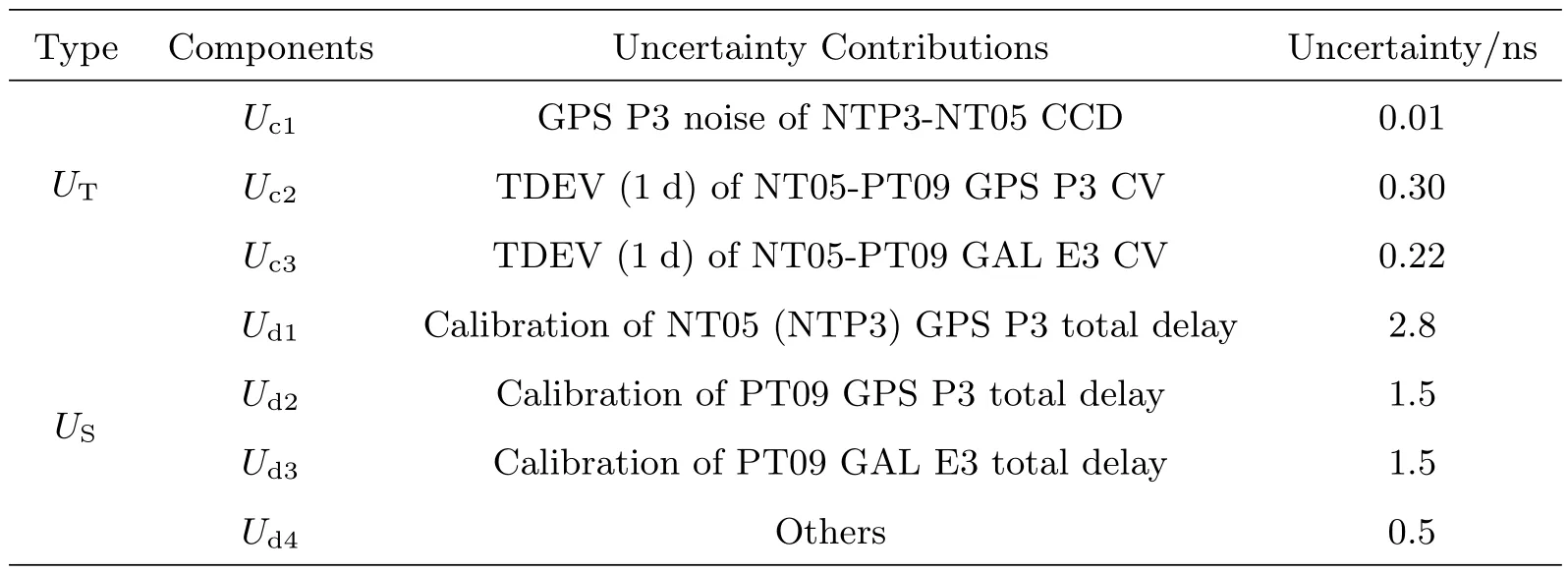
表3 NT05 Galileo E3信号总时延校准不确定度分析Table 3 Uncertainty analysis of total delay calibration of NT05 Galileo E3 singal
图10分别给出NT02、 NT05与PT09接收机GPS P3和Galileo E3共视时间比对结果的时间偏差(Time Deviation, TDEV), Tau为采样间隔. 将其1 d的TDEV作为NT02、NT05 Galileo E3总时延校准结果的统计不确定度分量. 根据表2和表3,利用(7)–(9)式可求得NT02、 NT05接收机Galileo E3总时延校准结果的统计不确定度分别为0.35 ns和0.37 ns, 系统不确定度都为3.46 ns, 总不确定度均约为3.5 ns. 由表2、表3可以看出, NT02、NT05接收机Galileo E3总时延的校准不确定度约99%来源于系统不确定度, 其中受NTP3 GPS P3总时延校准不确定度的影响最大, 因此在校准接收机信号时延时最好选择校准不确定度较小的接收机作为参考.
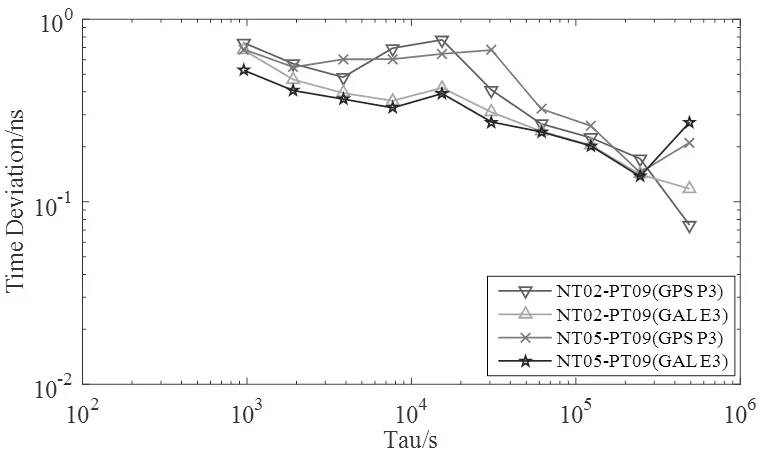
图10 NTSC与PTB间不同共视比对链路的时间偏差Fig.10 The TDEVs of different CV links between NTSC and PTB
4 校准结果验证
为了进一步验证NT02和NT05接收机Galileo E3总时延校准结果的可靠性, 选取NTP3、NT02、NT05和其他3个主要守时实验室的多模接收机在2021年11月28日至2021年12月27日(MJD: 59546–59575)期间的RINEX观测数据, 依据CCTF制定的时间传递标准生成GPS P3和Galileo E3标准共视文件. 所选接收机的详细信息见表4.

表4 所选测站接收机的配置信息Table 4 Configuration information for the selected receiver
图11、图12分别给出了校准NT02和NT05接收机GPS P3和Galileo E3总时延后与所选实验室接收机间GPS P3和Galileo E3链路的共视时间比对结果. 由图11–12可看出, NT02和NT05与其他实验室接收机间GPS P3和Galileo E3链路的共视比对结果一致性较好. 表5给出了在相同时刻两接收机间GPS P3和Galileo E3链路共视比对结果的差值均值, 其最小为0.06 ns, 最大约0.57 ns, 均在校准不确定度范围内.
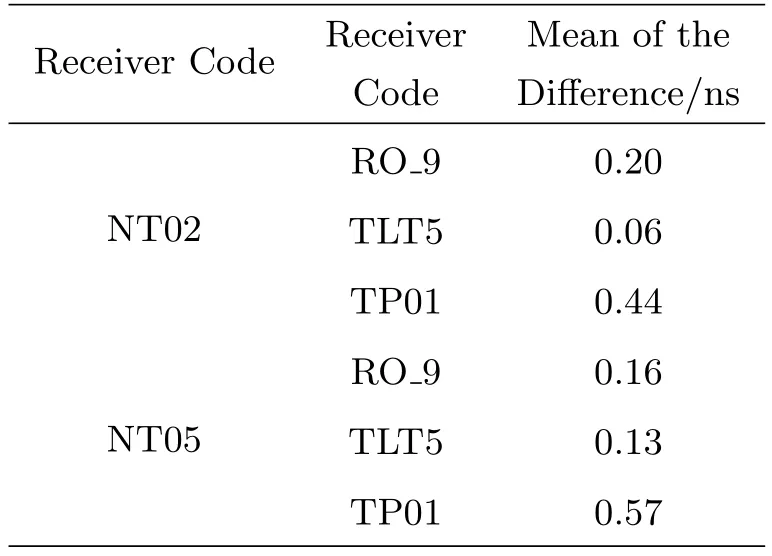
表5 两接收机间GPS和Galileo共视比对结果统计Table 5 Statistical CV results of GPS and Galileo between two receivers
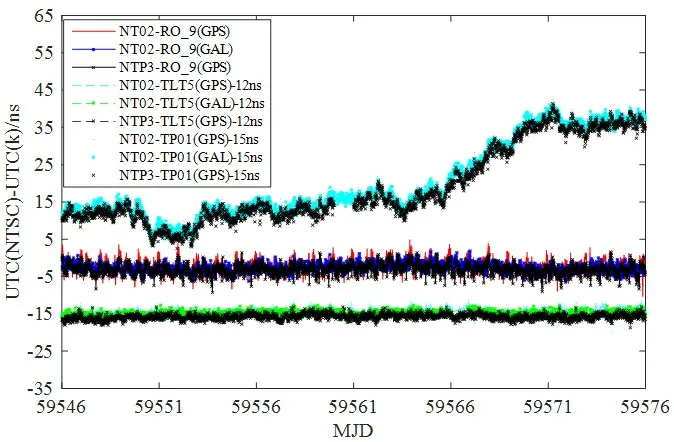
图11 NT02与所选接收机的共视比对结果Fig.11 CV results between NT02 and selected receivers
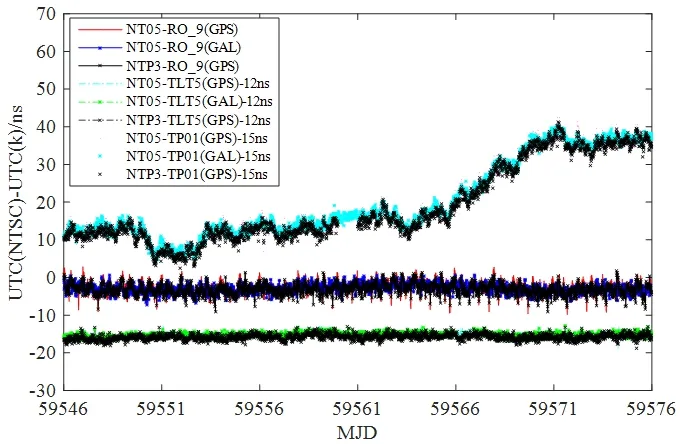
图12 NT05与所选接收机的共视比对结果Fig.12 CV results between NT05 and selected receivers
由于NTP3、RO_9、TLT5和TP01接收机GPS P3总时延均已经过BIPM或区域测量组织(Regional Metrology Organizations)巡回校准, 故可将NTP3与RO_9、TLT5和TP01间GPS P3链路的共视比对结果作为外部参考, 分别对NT02和NT05与其他3个守时实验室接收机间Galileo E3链路的共视比对结果进行评估, 统计结果见表6. 表7已分别给出RO_9、TLT5和TP01接收机GPS P3和Galileo E3总时延的初始校准不确定度. 由表6可知, 两实验室间Galileo E3链路相对GPS P3链路共视比对结果差值的均值均在校准不确定度范围内, 其中NT02和NT05与TP01间两条不同链路比对结果差值的均值相对较大, 最大为1.38 ns, 这可能是由TP01接收机GPS P3和Galileo E3总时延的初始校准不确定度较大造成的. 另外, 接收机信号总时延的校准不确定度也会随时间累积. 表8给出了用2022年5月NT02、NT05、NTP3和PT09接收机的RINEX观测数据以相同校准方式计算的NT02和NT05 Galileo E3总时延值. 由表8可看出, 时隔半年后NT02和NT05 Galileo E3总时延相比初始校准结果变化较小, 分别为0.5 ns和0.6 ns,其相对变化量分别为0.6%和1.2%, 在校准不确定度范围内. 综上可认为NT02和NT05接收机Galileo E3总时延校准有效、可靠.
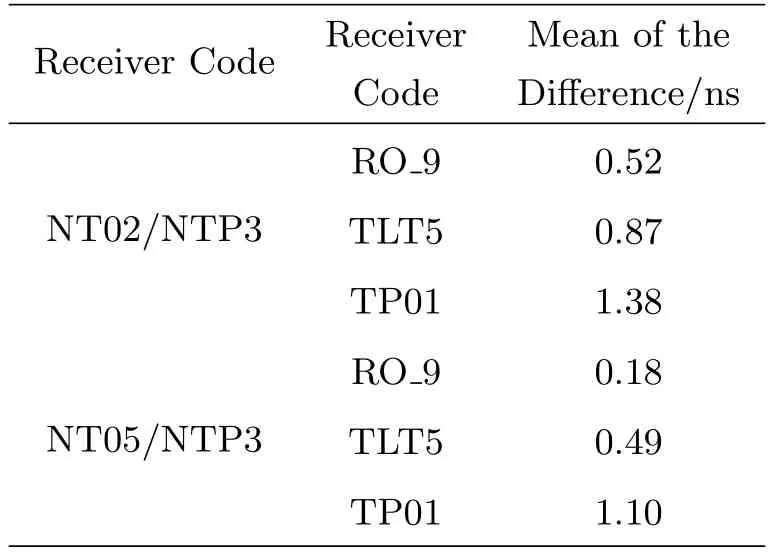
表6 两接收机间Galileo E3共视比对结果评估Table 6 Evaluation of Galileo E3 CV results between two receivers
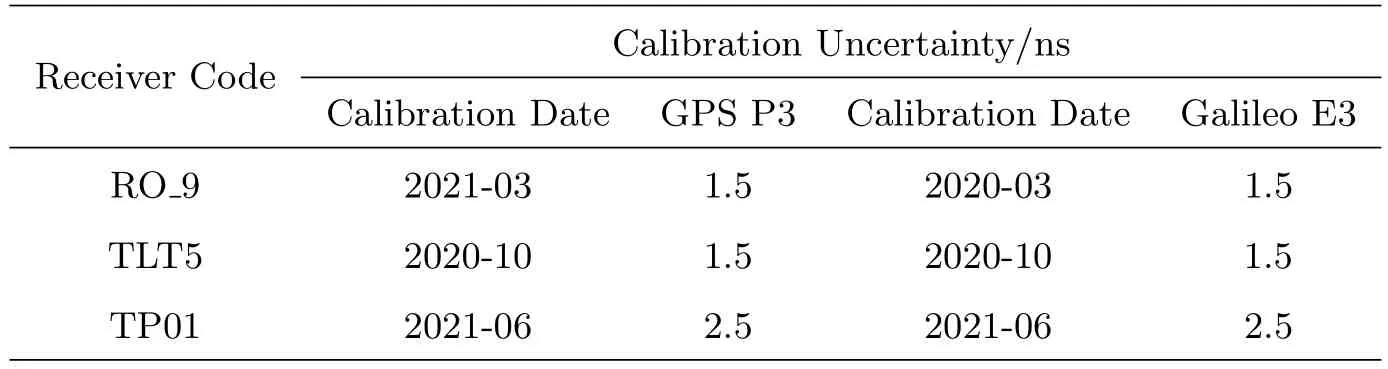
表7 接收机初始校准不确定度Table 7 Initial calibration uncertainties of the receivers

表8 NT02和NT05校准时延的稳定性Table 8 Stability of NT02 and NT05 calibration delay
5 结论
本文先利用NTP3以共钟差分校准的方式对NT02和NT05接收机GPS P3总时延校准, 然后分别以NT02、NT05与PT09间GPS P3链路的共视比对结果为参考, 通过两实验室间Galileo E3共视比对结果分别求得待校准接收机NT02和NT05的Galileo E3总时延,详细分析了其总时延的校准不确定度并对校准结果的可靠性进行了验证. 现可得到如下结论:
1) NT02和NT05接收机Galileo E3总时延分别为74.6 ns和46.5 ns, 校准不确定度均为3.5 ns, 其受系统不确定度的影响较大, 因此要尽可能选择校准不确定度相对较小的接收机作为参考站.
2) NT02和NT05接收机Galileo E3总时延校准后与其他3个主要守时实验室间Galileo E3和GPS P3链路的共视比对结果一致性较好, 以NTP3与其他实验室接收机间GPS P3链路的共视比对结果为外部参考, 比对结果的差值均值均小于1.5 ns, 在校准不确定度范围内, 说明用本文方法计算的校准结果是有效的.
3) NT02和NT05 Galileo E3总时延的校准结果在半年内变化较小, 分别为0.5 ns和0.6 ns, 均在校准不确定度范围内, 相对初始校准结果的变化约0.6%和1.2%, 可认为校准时延比较稳定.
4)在校准条件允许的情况下, 本文所采用的校准方法可作为接收机信号时延校准的补充或检核.与传统的差分校准相比, 该校准方法操作简单且无需移动校准站, 节省了移动校准站的运输成本.
猜你喜欢
新传奇(2019年29期)2019-08-06
电子制作(2019年23期)2019-02-23
测控技术(2018年6期)2018-11-25
测控技术(2018年6期)2018-11-25
电子制作(2018年19期)2018-11-14
电子制作(2016年1期)2016-11-07
系统工程与电子技术(2016年4期)2016-08-24
系统工程与电子技术(2016年7期)2016-08-21
小天使·一年级语数英综合(2016年5期)2016-05-14
电测与仪表(2016年17期)2016-04-11