基于深度BP/ELMAN神经网络的山区GNSS高程转换精度分析
2023-10-10 14:35魏德宏禤键豪杨嘉伟张兴福
测绘通报 2023年9期
魏德宏,禤键豪,杨嘉伟,张兴福,余 旭
(1. 广东工业大学测绘工程系,广东 广州 510006; 2. 同济大学测绘与地理信息学院,上海 200092;3. 临沂市自然资源和规划局,山东 临沂 276000)
利用GNSS技术可快速测量地面点的三维坐标,但由于其高程为大地高,无法用于实际生产,因此,寻求将GNSS测量大地高转换为正常高的有效方法具有重要的实用价值。目前常用于GNSS高程转换的方法包括函数模型拟合法[1]、地球重力场模型法[2]、似大地水准面模型法[3]、机器学习法[4]等。而在高程异常变化较大的山区,探讨利用少量GNSS水准点实现较高精度的GNSS高程转换仍然具有非常高的应用价值。近年来以深度学习为代表的机器学习方法已被广泛应用于各个领域[5],部分学者探讨将机器学习方法用于GNSS高程转换[6]。本文基于GSVS2017项目高精度实测GNSS水准数据、SGG-UGM-2重力场模型及剩余地形模型等数据,利用移去-恢复法,将不同计算方案的深度BP/ELMAN神经网络方法用于山区GNSS高程转换,同时与其他转换方法进行对比及相关精度分析。
1 原理与方法
选择深度BP神经网络、深度ELMAN神经网络、径向基函数神经网络、广义回归神经网络及支持向量机回归等方法,分析其用于山区GNSS高程转换的精度。BP神经网络为前馈全局逼近神经网络,由输入层、隐含层、输出层组成,可包含一层或以上隐含层,主要特点为误差反向传播以调节权值与阈值[7]。ELMAN神经网络为采用延时算子的反馈型神经网络[8],结构比BP神经网络多一个连接层,以记忆隐含层为此刻输出值,并在下一时刻输出,使得网络具有记忆历史数据的功能。当BP和ELMAN神经网络采用两层以上隐含层的深度学习算法时,可称为深度BP/ELMAN神经网络[9]。径向基函数神经网络(RBFNN)为前馈局部逼近神经网络,结构与BP神经网络相似,以径向基函数作为隐含层激励函数[10]。广义回归神经网络(GRNN)为一种改进的径向基函数网络,结构包含输入层、模式层、求和层、输出层[11],适用于非线性问题的研究。支持向量机回归(SVR)通过确定的非线性映射将输入向量映射到高维Hilbert空间中,在此空间进行线性回归[12]。本文基于遗传算法(GA)选取SVR的最优参数进行回归。
选择GNSS水准点的经度、纬度、大地高及SGG-UGM-2模型的高程异常作为输入变量,移去SGG-UGM-2模型[13]与剩余地形模型[14]的高程异常后的剩余高程异常作为目标变量,采用基于移去-恢复[14]的深度BP/ELMAN神经网络进行GNSS高程转换,具体数据处理流程如图1所示。利用GRNN、RBFNN、SVR方法进行GNSS高程转换的流程也类似。
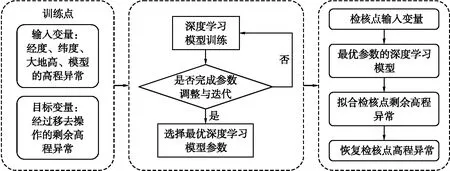
图1 基于移去-恢复的深度BP/ELMAN神经网络的高程异常拟合流程
2 实例与分析
选取NGS GSVS2017工程共200个线状分布的GNSS水准点为研究对象。测区地形为山地,海拔范围约为1900~3300 m,线路总长约320 km,平均点间距离约为1.6 km,高程异常值变化范围为-20.135~-16.644 m,地形和高程异常起伏情况如图2所示。利用所有GNSS水准点对2190阶次的SGG-UGM-2模型进行精度评估,结果显示,模型在该测区的精度为17.6 cm。下文采用基于移去-恢复的深度BP/ELMAN神经网络及其他拟合方法进行高程异常拟合与精度分析。

图2 GSVS2017项目的GNSS水准点海拔高度与高程异常起伏
借助Matlab软件中的相关函数或工具包,利用深度BP/ELMAN神经网络、GRNN、RBFNN和SVR进行GNSS高程转换的程序设计,并进行试验与精度分析,其中深度BP/ELMAN神经网络采用多层隐含层(即深度学习算法),且考虑不同隐含层激励函数进行训练,隐含层最高取6层,循环取优;GRNN、RBFNN和SVR的激励(核)函数均采用高斯函数。为消除数据量纲等的影响,对输入数据及目标数据归一化至[-1,1][15]。本文分3种方案进行相关试验,即每50个GNSS水准点为一组,共4组,每组线路长约80 km(方案1);每100个GNSS水准点为一组,共2组,每组线路长约160 km(方案2);每200个GNSS水准点为一组,共1组(方案3)。GNSS水准点分别按点间距约50、30、15、10、5 km进行取点作为训练点,剩余点作为检核点。图3为各方案GNSS高程转换外符合精度的统计结果,其中训练点间距为50 km时由于已知点较少,只考虑方案3,部分方案由于训练点不足无法解算而没有结果,BP/ELMAN括号内容表示所选用的隐含层激励函数。
在深度BP/ELMAN神经网络中:①当训练点间距为50 km时,方案3拟合精度为3.45~6.39 cm,深度BP/ELMAN神经网络(ReLU函数)的拟合精度为3.45/3.49 cm。②当训练点间距为30 km时,方案1拟合精度为2.38~6.38 cm,方案2拟合精度为2.85~4.49 cm,方案3拟合精度为2.98~4.31 cm,深度BP/ELMAN神经网络(ReLU函数)拟合精度分别为2.57/2.38、2.86/2.85、3.17/2.98 cm。③当训练点间距为15 km时,方案1拟合精度为1.54~2.50 cm,方案2拟合精度为1.71~2.43 cm,方案3拟合精度为1.97~2.58 cm,深度BP/ELMAN神经网络(ReLU函数)分别为1.79/1.80、2.00/2.24和2.16/2.19 cm。④当训练点间距为10 km时,方案1拟合精度为0.97~1.37 cm,方案2拟合精度为1.04~1.42 cm,方案3拟合精度为1.27~1.63 cm,深度BP/ELMAN神经网络(ReLU函数)分别为1.00/1.04、1.05/1.14和1.28/1.27 cm。⑤当训练点间距为5 km时,方案1拟合精度为0.57~0.67 cm,方案2拟合精度为0.64~0.69 cm,方案3拟合精度为0.68~0.82 cm,不同隐含层激励函数的深度BP/ELMAN神经网络的拟合精度基本相同。
此外,当训练点间距分别为50、30、15、10、5 km时,GRNN、RBFNN、SVR、二次曲线和曲面拟合中所有方案外符合精度最优分别为3.68、4.15、2.74、1.38、0.69 cm,采用深度BP/ELMAN神经网络(ReLU函数)较其分别提升6%/5%、38%/43%、35%/34%、28%/25%和16%/17%。可见采用深度BP/ELMAN神经网络(ReLU函数)进行GNSS高程转换较GRNN、RBFNN、SVR、二次曲线和曲面拟合方法有较大的优势。
综上所述,深度BP/ELMAN神经网络(ReLU函数)在不同的训练点间距中均能获得较高精度的结果,尤其当已知GNSS水准点点间距较大时,优势明显,在实际应用中可优先考虑该方法。
进一步分析在训练点间距分别为50、30、15、10、5 km时,深度BP/ELMAN神经网络(ReLU函数)两者中最优方法的拟合精度(两者差别可忽略)。图4为拟合后的高程异常残差。可以看出,训练点间距越小,检核点残差值越小,5种计算结果中检核点残差最大值分别为10.45、7.70、4.49、2.34、1.36 cm,最小值分别为-7.02、-5.67、-5.44、-3.31、-1.49 cm,平均值分别为0.57、0.41、0.33、0.10、0.01 cm,经计算,5种拟合中检核点间高差分别有100%、98%、98%、100%、100%符合五等水准测量要求,有92%、92%、97%、98%、100%符合四等水准测量要求,有77%、78%、82%、91%、100%符合三等水准测量要求,有31%、27%、36%、34%、58%满足二等水准测量要求。

图4 高程异常拟合残差
3 结 语
本文利用GSVS2017项目提供的GNSS水准数据,基于移去-恢复法,分别采用不同隐含层激励函数的深度BP/ELMAN神经网络及其他方法进行GNSS高程转换与精度分析,主要结论如下。
(1)深度BP/ELMAN神经网络(ReLU函数)在不同的训练点间距及不同计算方案中均能取得较高的GNSS高程转换精度,在山区GNSS高程转换中可优先考虑该方法。
(2)采用深度BP/ELMAN神经网络(ReLU函数)进行GNSS高程转换时,所有点间距计算结果均可满足90%以上检核点间高差,达四等测量精度,75%以上可达三等水准测量精度。训练点间距为5 km时,55%以上高差可达二等水准测量精度。
猜你喜欢
北京测绘(2021年1期)2021-02-05
当代陕西(2020年23期)2021-01-07
中国交通信息化(2019年4期)2019-07-13
家庭影院技术(2018年11期)2019-01-21
石家庄铁路职业技术学院学报(2017年4期)2017-05-25
小学生导刊(低年级)(2016年5期)2016-05-27
全球定位系统(2015年4期)2015-02-28
浙江国土资源(2014年5期)2014-04-28
印制电路信息(2014年11期)2014-03-11
测绘科学与工程(2013年6期)2013-03-11