面向小型无人艇健康监测系统方案设计与实施
2023-10-18 02:32殷文慧郭栋王飞郭煜张安通
装备环境工程 2023年9期
殷文慧,郭栋,王飞,郭煜,张安通
(1.中国船舶科学研究中心,江苏 无锡 214082;2.深海技术科学太湖实验室,江苏 无锡 214100)
无人艇近年来逐渐成为各领域关注的焦点,在海 洋科学研究、海上救援等方面应用前景广泛[1-2]。这些应用场景对无人艇的可靠性和安全性提出了更高的要求,因此无人艇的健康管理显得尤为重要。健康管理系统可以实时监测、评估无人艇的运行状态,并及时预警潜在的故障和风险,从而提高无人艇的使用寿命,降低运行成本,保障水上安全。
船舶健康管理技术在近年来得到了广泛关注,学术界和工业界已经开展了大量研究[3-7]。学者们针对船舶的各种关键设备和系统进行了实时监测和性能评估,如动力系统监测[8-10]、电力系统监测[11-13]、船舶结构健康监测[14-17]、船舶环境与能源系统监测等[18-20]。通过采集各类传感器数据,研究者们利用大数据分析、机器学习、深度学习等先进技术实现了对故障的及时诊断和预测[21-24]。人工智能技术的引入,使得船舶健康管理在故障诊断、预测性维护等方面取得了显著进展[25-26]。
当前的船舶健康管理技术已经取得了显著进步,但面对小型无人艇的相关研究仍存在一些问题。首先,针对小型无人艇这一对象的健康管理研究相对较少,其特有的小型化、无人化、自主作业以及在恶劣环境工作等特点,使其面临与传统船舶不同的一系列健康管理挑战。其次,现有的研究更多地关注某一设备的具体故障,如柴油机润滑系统故障、轴承故障、曲轴裂纹故障等,缺乏从系统级角度和船舶整体性能角度进行分析。
鉴于此,本文旨在从船舶系统角度出发,充分考虑小型无人艇相较于传统船舶的特殊性以及在运行过程中可能面临的各种挑战,权衡各系统重要程度及复杂程度,针对无人艇动力电力系统进行健康监测方案设计与实施。通过全面监测无人艇动力电力系统的运行状态,希望能为未来小型无人艇的健康管理研究提供参考,以实现对无人艇的全面、深入、精细管理,提高其可靠性和安全性。
无人艇的健康管理,特别是针对其动力、电力系统的健康管理,是提高无人艇系统可靠性的关键。本文的研究不仅有助于解决小型无人艇在特殊环境和使用条件下的健康管理问题,而且从系统级别、船舶整体性能角度出发,提供一种新的视角和方法,为无人艇健康管理技术发展提供参考。
1 小型无人艇健康管理特性及挑战
小型无人艇健康管理的特性和挑战涵盖了多个维度,主要围绕艇体小型化、船舶应用环境、无人操作与自主性,以及恶劣环境中的运作等方面展开。
小型化及船舶应用特点:小型无人艇体积小,且需要满足高性能的船舶应用要求,健康管理系统需要在有限的体积和载荷下,实现更高的性能。这一特点对传感器的选择、部署和优化,以及数据采集、处理和实时传输的设计提出了挑战。
恶劣环境工作:无人艇根据其工作特点和应用场景,需要在恶劣环境中工作,其健康管理系统需要具备强干扰性、防水性和防腐蚀性,对数据采集和通信也提出了更高的要求,也提升了系统设计和实施的难度。
无人自主作业:无人艇大部分情况下都需要无人干预地执行任务,自主作业特性要求其健康管理系统具备更强的自主性和智能化水平,具备实时监控和诊断能力,能处理大量的实时数据,包括数据去噪、平滑处理、特征提取等。
成本与效益权衡:无人艇的投资和运营成本相对较低,健康管理系统的设计和实施需要在满足性能要求的前提下,尽可能降低成本,使得系统具有高性价比。
2 健康监测系统方案设计与实施
2.1 无人艇系统组成与设备介绍
无人艇由一系列互相协作的系统组成,按照功能主要划分为动力系统、电力系统、通信导航系统、态势感知系统、远程控制系统、航行保障系统等。各系统的重要程度和复杂性各不相同,面向全船的健康管理系统以提升全船的可靠性、可用性为目标,按照基于视情维修的开放体系(OSA-CBM)层级划分,分别设定不同的健康管理目标,对各系统进行权衡分级。其中,动力系统负责提供推动力,使无人艇能够在水域中自由移动,其性能好坏直接影响无人艇的速度、灵活性和行驶续航能力。电力系统则提供电力支持,为艇上的所有电气设备供电,其稳定性和可靠性对无人艇的整体运行至关重要。动力电力系统作为支撑无人艇运行的核心,其健康状况直接关系到无人艇的运行安全和效率,因此将其健康管理作为本文研究重点。
本文健康监测系统的搭建对象为7 t 级小型无人艇,舱底平面布置俯视图如图1 所示。其动力系统为双机双桨模式,每个机舱内推进系统由一四缸柴油机、齿轮箱、推进轴系和推进器组成;电力系统由发电机、配电线缆、用电设备组成,主要用电设备是位于机舱的进风机和排风机,船上发电机与岸电的切换电源、进风机等用电设备电源模块均位于船艏控制舱内。
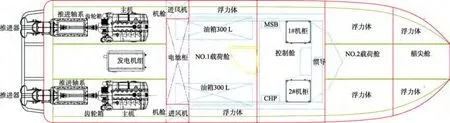
图1 小型无人艇舱底布置俯视图Fig.1 Top view for bilge layout of small unmanned surface vehicle
2.2 测点与传感器选择、部署实施
为了对无人艇动力电力系统的运行状况进行全面监测,本文根据系统的工作原理以及常见的典型故障,设计面向小型无人艇动力电力系统的健康监测系统,架构如图2 所示。

图2 健康监测系统架构Fig.2 Health monitoring system architecture
选择以下测点,并在这些位置部署了传感器。
1)柴油机气缸盖。气缸盖承受着柴油机内燃气产生的高压力,对于反映柴油机工作状态具有较高的敏感性。本系统在柴油机一缸、四缸位置安装单向振动传感器(如图3a 所示),实时监测气缸盖内部的磨损、松动、高压燃气泄漏等问题[27-28]。

图3 健康监测系统部署及安装Fig.3 Deployment and installation of health monitoring system:a) vibration sensor installation at cylinder head;b) oil pressure sensor installation at fuel injector pipe;c) vibration sensor installation at gearbox;d) sound pickup sensor installation within engine compartment;e) transformer installation location;f) transformer installation;g) vibration sensor installation at generator base;h) data logger deployment and installation
2)喷油器油管。喷油管负责将高压燃油输送到气缸内,其工作状态直接影响到燃油喷射的稳定性和柴油机的燃烧效率。本系统选择在柴油机一缸喷油器油管上安装油压传感器(如图3b 所示),以监测油压变化,并及时发现喷油器故障、油管堵塞、油泵不正常工作等问题。
3)齿轮箱。齿轮箱运行状态对动力推进系统性能有重大影响。齿轮运转中可能出现的故障、齿面磨损、轴承故障等都会导致振动变化。为实时监测这些变化,本文在齿轮箱上安装了一个三向振动传感器(如图3c 所示),分别监测齿轮箱的水平、垂直和轴向振动,提供更全面的齿轮箱状态信息。
4)机舱内部。机舱内各种设备在运行时,会产生各种声音。这些声音包含了丰富的信息,可以反映出设备的工作状态。本系统在两机舱中各安装2 个拾音传感器(如图3d 所示),捕捉机舱内部声音信号,并进行声音信号分析。
5)电力系统。电力系统的稳定性直接关系到无人艇的运行效率。本系统在发电机、风机等重要用电设备电路上安装互感器(如图3e、f 所示),实时监测电压和电流,从而发现和预防过电压、欠电压、过流、短路等问题,保证电力系统稳定运行[29-31]。
6)发电机基座。发电机作为电力系统的核心部分,其运行稳定性对保障无人艇的持续工作至关重要。基座的振动状态反映了发电机的运行状况,轴承磨损、转子失衡、定转子间隙变化等都可能导致振动的异常[32]。本系统在发电机基座上安装了单向振动传感器(如图3g 所示),实时监测基座的振动状况。
上述传感器的监控对象、类型及安装位置汇总见表1。上述测点位置及传感器覆盖了无人艇动力、电力系统的主要组成部分,为无人艇健康监测提供全面的信息,从而可以提前发现潜在故障,为故障诊断提供有力依据。需要明确的是,传感器的选择和部署并非一成不变的,应根据无人艇的具体工作环境和任务需求进行动态调整。如果在后续的运行中发现新的故障模式,或者有新的监测需求,可能需要增加新的测点,或者更换类型更合适的传感器。
2.3 数据预处理与分析
无人艇航行阶段,健康监测系统成功收集到各传感器的工作数据,反映出无人艇在运行过程中的状态和性能。为了更好地理解和利用这些数据,本文对采集到的柴油机振动数据进行初步处理与分析。常用的数据处理方法包括时域分析、频域分析、时频域分析、统计分析、机器学习等。
振动信号时域分析反映的是振动信号随时间的变化情况,直接在时间序列数据上进行,无需转换到其他数学形式,用于评估和描述信号波形在时间轴上的变化特性。不同时刻表现出来的状态值,其统计数字特征能够反映设备在某一时间上的表现行为,从而用来表征设备的运行状态信息。在时域分析中,信号x(t)通常被视为时间t的函数。该方法主要关注信号的振幅、相位、周期性等属性。由于实际采样的原始信号没有明确的起始点,截取两发动机1 s 喷油振动信号定位出一缸的工作周期,分别映射到一缸和四缸振动信号时刻上,得到两发动机1 个工作周期内振动冲击信号,如图4 所示。根据发动机各缸工作的相位,每个冲击对应不同的冲击类型。结合发动机各缸做功先后顺序(1-3-4-2),得出图4c、d 中方框部分为发动机第一、二缸的做功峰值,图4e、f 中方框部分为发动机第三、四缸的做功峰值。峰值较小,且持续时间较短的冲击为气门落座冲击位置。通过对比不同时刻采集到的振动冲击信号分析可以得出,发动机无失火现象发生。
时频域分析方法能够揭示信号在时间和频率2个维度上的复杂结构。旨在表示信号x(t)在时间t和频率f上的联合分布。这种表示通常通过时频分布(Time-Frequency Distribution,TFD)来实现。本文采用较常用的时频域分析方法之一短时傅里叶变换(Short-Time Fourier Transform,STFT),对发动机振动信号进行处理。
式中:x(t) 为原始信号,是时间t的函数;τ为虚拟时间变量,用于在整合操作中替换实际时间t;w(t-τ)为窗函数,用于选取信号x(t)的局部片段,窗函数在t τ-附近为非0,其余地方为0;为复指数函数,其中j 为虚数单位,f为频率,用于分析x(τ)在不同频率下的表现,t、f为局部时间和频率变量,用于表示STFT 的2 个维度。
在式(1)中,w(t-τ)和 e-j2πfτ的乘积作用于x(τ),局部化地提取x(t) 在时间t和频率f下的信息。该公式通过将信号局部化到一个小窗内,然后对该窗内的信号进行傅里叶变换,从而能够同时获取信号在特定时间和频率下的信息。
同一时刻两发动机第四缸的时频谱如图5 所示,高亮区域为频谱峰值,频谱能量幅值集中在0.03~0.04 s、300~3 000 Hz 区域。当发动机气缸出现明显异常时,落座冲击和爆燃冲击将会不稳定,部分能量将会分布在一些特有的故障特征频带上,能量集中区域会发生明显改变。若以2#发动机作为正常对照组,1#发动机为实验组,观察能量集中的高亮区域,两图在频谱能量分布上无明显区别,初步说明两发动机运行状态相似。

图5 两发动机第四缸振动时频谱Fig.5 Vibration frequency spectrum of the fourth cylinder of two engines:a) diesel 1;b) diesel 2
在复杂的现实环境中,由于各种噪声和扰动的影响,传统的数据分析方法可能并不足以发现隐藏的异常模式。基于自编码器(Autoencoder)的异常检测是一种无监督学习方法,用于识别数据中的异常或离群点。这种方法特别适用于高维数据,如振动信号,其中异常可能在多个维度上表现出来。自编码器是一种神经网络,由编码器(Encoder)和解码器(Decoder)2 部分组成。编码器将输入数据压缩成一个低维隐层表示(或编码),解码器则从这个低维编码重构回原始数据,见式(2)。
式中:x为原始数据;z为编码后的低维表示;为重构的数据;θe、θd为编码器和解码器的参数。目标是最小化重构误差,使用均方误差(MSE)作为损失函数:
基于自编码器的异常检测方法能有效地应用于振动信号的实时监测,从而实现对发动机状态的准确判断。本文采集数据来自2 台发动机一缸振动信号,选择2#发动机振动信号作为训练数据,使用这些数据训练自编码器,以最小化重构误差,建立正常发动机频谱能量分布的样本空间。在训练集上,计算每个数据点的重构误差,并在重构误差的均值基础上加一常数作为阈值,使用1#发动机振动数据运行自编码器,1#发动机的频谱能量分布作为验证集,对于重构误差超过阈值的数据点,标记为异常。两发动机损失函数结果如图6 所示。可以看出,1#发动机数据集的整体Loss 值近似于2#发动机,1#发动机数据集的频谱能量分布与2#发动机的训练集差别不大,说明两发动机的工作状态相似。

图6 基于自编码器的异常检测结果Fig.6 Anomaly detection results based on autoencoder:a) loss function training curve;b) 2#engcne vaeidation set results;c) 1# engine dataset results
3 研究展望
小型无人艇的健康管理目前仍处在状态监测阶段,为提升无人艇作业效率和安全性,需进一步优化监测系统,主要包括以下内容。
1)状态评估。有效评价无人艇运行过程中的健康状况。当前的状态监测主要关注无人艇各个设备部件的运行参数,但这些参数仅能提供有限的信息。状态评估需要通过对这些参数进行深入分析,结合无人艇的工作环境、负载、历史数据等多维度信息,综合评估无人艇的运行状态。这将有助于识别潜在的故障风险,为后续的故障诊断和预测提供依据。
2)故障诊断。准确、及时地识别无人艇故障原因。当前的故障诊断方法主要包括专家系统、模式识别、神经网络等,但在小型无人艇领域的应用有待提高。未来研究需要针对小型无人艇特点,发展更高效、准确的故障诊断技术。此外,考虑到无人艇在恶劣环境下的作业需求,故障诊断方法应具备良好的鲁棒性,能在不确定性条件下保持高识别准确率。
3)故障预测。提前预警潜在故障,为无人艇的维护和修理提供充足时间。未来的研究应关注提高故障预测的准确性和可靠性,发展适用于小型无人艇的预测模型,结合大数据、人工智能等先进技术,实现对海量数据的高效处理和分析,为故障预测提供强有力的支持。
除了上述功能的研究与实施外,无人艇健康监测系统还需关注以下几个方面。
1)数据融合。充分利用多种传感器采集的数据,通过数据融合技术,提高健康监测系统的准确性和可靠性。这包括对多源异构数据的预处理、特征提取、融合算法设计等方面的研究。
2)自适应监测。针对无人艇在不同工况下的特点,研究自适应健康监测方法。通过动态调整监测参数和策略,使健康监测系统在不同环境和任务下均能保持高性能。
3)智能决策支持。将健康监测系统与无人艇的控制系统相结合,为无人艇的自主决策提供实时、有效的健康信息。通过分析和预测无人艇的运行状态和故障风险,为无人艇的任务规划和执行提供参考。
4)安全与隐私保护。在健康监测系统中,对无人艇的数据采集、传输和存储等环节的安全和隐私保护至关重要。未来研究需关注加密、授权等技术的应用,确保健康监测数据的安全性和可信度。
4 结语
本文专注于小型无人艇的健康管理,针对其特性及挑战,提出并实施了一套专门针对小型无人艇的健康监测系统。系统重点关注动力电力系统,根据典型故障确定监测点位置,选择合适的传感器,并完成部署。通过采用时域分析、时频谱分析以及基于自编码器的异常检测技术方法对数据进行预处理与分析,证实了监测系统的有效性,它能有效监测故障,维护无人艇的稳定运行。尽管当前的研究提供了切实可行的解决方案,监测系统仍需进一步优化,以提高作业效率和安全性。未来的研究将更加深入地探讨如何更精准地进行状态评估、故障诊断和故障预测,并将考虑利用大数据和人工智能等技术,对海量数据进行高效处理和分析。总的来说,这项研究不仅为小型无人艇的健康管理提供了实用的工具,同时也指出了未来的研究方向。
猜你喜欢
科学大众(2023年17期)2023-10-26
天天爱科学(2020年6期)2020-09-10
民用飞机设计与研究(2019年2期)2019-08-05
小哥白尼(军事科学)(2019年2期)2019-04-17
小哥白尼·趣味科学画报(2019年12期)2019-02-28
数学物理学报(2017年6期)2018-01-22
岷峨诗稿(2017年4期)2017-04-20
新高考(英语进阶)(2017年12期)2017-02-26
汽车与新动力(2015年1期)2015-02-27
计算物理(2014年2期)2014-03-11