基于CIDAS碰撞事故仿真的AEB效果测试
2023-10-19 07:11沈钰博陆一宾
汽车实用技术 2023年19期
沈钰博,陆一宾,王 伊,郭 伦
基于CIDAS碰撞事故仿真的AEB效果测试
沈钰博,陆一宾,王 伊,郭 伦
(长安大学 汽车学院,陕西 西安 710064)
针对三种不同自动紧急制动(AEB)控制模型在不同碰撞事故场景下的适用性进行分析,基于中国交通事故深入研究(CIDAS)数据库,利用PreScan软件搭建事故场景,并联通Simulink添加车辆控制模型,通过重建CIDAS交通事故数据库中真实碰撞事故场景进行测试。仿真结果验证了基于安全距离模型的AEB控制策略可以有效避免追尾碰撞事故或减轻碰撞造成的危害,其中Mazda模型算法相对保守,适用于高速场景,Honda模型算法和Berkeley模型算法相对激进,适用于中低速场景,为主动安全技术的测评与改进提供了参考。
自动紧急制动;安全距离模型;制动临界距离;测试评价;场景构建
在我国道路交通事故中,造成危害最为严重的是汽车碰撞事故[1],占比70%左右,且大多数的撞车事故类型为汽车追尾事故。因此,如何系统、全面地研究碰撞问题成为如今道路安全最为紧迫的课题之一。
为了从根源上避免事故发生,汽车主动安全技术[2]成为了众多学者研究的方向。其中自动紧急制动系统可以将动态制动和紧急制动相互协调统一起来,最大程度地降低车辆追尾碰撞事故发生的概率。陆一弘[3]通过将PreScan、CarSim和Simulink联合仿真,为综合研究智能汽车的环境感知以及控制决策提供了一种可行的方法;栾铭湧等[4]通过联通PreScan与Trucksim,在仿真中模拟先进驾驶辅助系统(Advanced Drive Assist System, ADAS)功能,验证简单的自动紧急制动(Autonomous Emergency Braking, AEB)模型控制算法对前方静止车辆追尾(Car-to-Car Rear Stationary, CCRs)工况测试评价指标是否满足。
下文使用PreScan与Sumlink联合仿真,通过比较不同AEB安全距离模型控制在不同碰撞事故场景中的适用性,测试不同控制策略对行车安全的影响,并为主动安全技术的测评与改进提供方法。
1 基于安全距离的AEB控制模型
安全距离模型的作用是将车辆传感器实时探测到的车辆间距与电子控制系统中设置的临界距离进行对比[5]。警告临界距离被定义为车辆速度和相对速度的函数。当实际两车间距大于初始设置的临界预警车距时,AEB保持关闭状态;当实际两车间距小于或者等于设置的临界预警车距,系统则会通过声音或图像的方式提醒驾驶人前方存在危险;当实际间距小于安全制动车距时,车辆则会进入自动紧急制动模式。应用于紧急制动系统的行车安全间距模型必须兼顾行车安全和道路交通效率这两方面的要求,如果过早介入制动会影响驾驶员的正常驾驶[6]。下面介绍马自达(Maz- da)、本田(Honda)和伯克利(Berkeley)三种安全距离模型。
1.1 Mazda模型
Mazda安全距离模型使用以下制动临界距离算法定义:
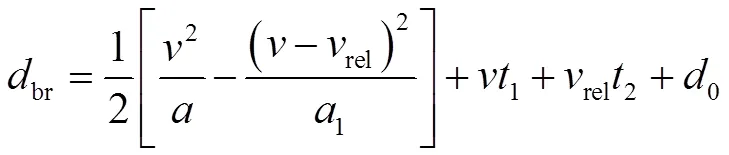
式中,为主车车速;rel为相对速度;为主车最大减速度;1为目标车最大减速度;1为驾驶员反应时间;2为制动器延迟时间;0为最小停车距离。
仿真测试=6 m/s2;1=8 m/s2;1=0.1 s;2= 0.6 s;0=5 m;当rel>,使得br=0。
1.2 Honda模型
Honda安全距离模型使用以下制动临界距离算法定义:

式中,为主车车速;2为目标车辆车速;为主车的最大减速度;1为目标车辆的最大减速度;1为延迟时间;2为制动时间。
仿真测试=1=7.8 m/s2;1=0.5 s;2=1.5 s;当rel>时,br=0。
1.3 Berkeley模型
Berkeley安全距离模型使用以下制动临界距离算法定义:
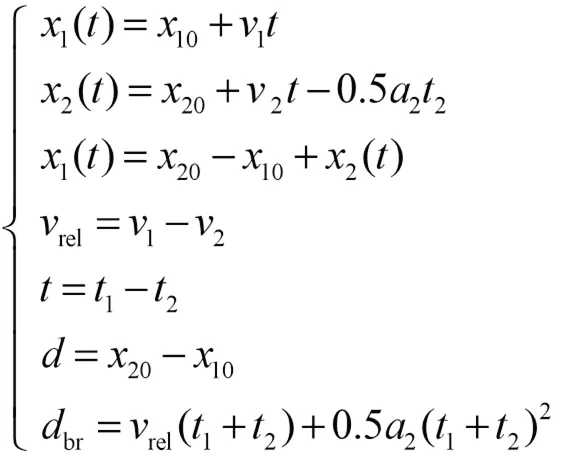
式中,10为主车初始位置;20为目标车初始位置;1为驾驶员反应时间;2为制动系统的延迟时间;2为两车最大制动减速度。
仿真测试1=1 s;2=0.2 s;2=6 m/s2;当rel>时,br=0。
2 仿真场景搭建
2.1 基于PreScan进行场景搭建
中国交通事故深入研究(China In Depth Acci- dent Study, CIDAS)数据库是中国道路交通事故数据的一种,记录的事故中数据比较全面,结构较完整[7]。PreScan是一款用来测试汽车主动安全技术的平台,具有真实的车辆动力学模型,可以进行自动驾驶模拟测试[8]。通过PreScan导入CIDAS中重建的事故场景数据,基于图形用户界面(Gra- phics User Interface, GUI)建立CIDAS道路场景,如图1所示。添加PreScan中自带的2D动力学车辆模型,设置仿真频率为100 Hz。
2.2 Simulink控制策略模型
PreScan中场景搭建完成之后,在Simulink编译界面生成车辆模型,并搭建车辆仿真模型,如图2所示。
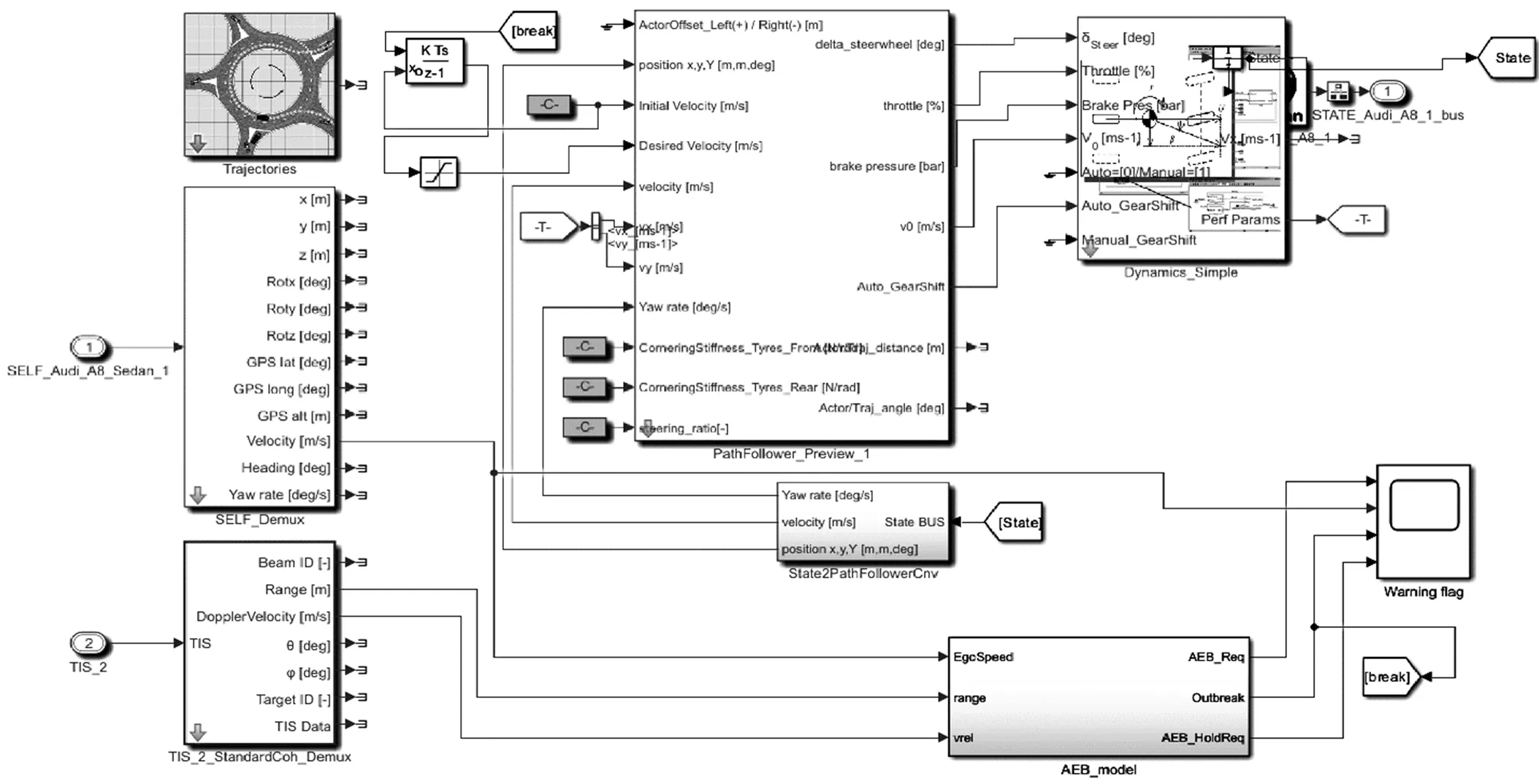
图2 主车控制模型搭建界面
3 基于真实事故场景下的测试
3.1 事故场景选取
在CIDAS的交通事故数据库中,选取前车静止时的事故案例3起并编号为A,前车匀速行驶时事故案例6起并编号为B,以及前车制动减速时事故案例3起并编号为C,所有事故均为直线行驶时车辆纵向追尾碰撞。事故数据及仿真测试结果如表1、表2及表3所示。每个事故案例如编号A1中最小车距、是否碰撞测试结果的第一行为Mazda模型;第二行为Honda模型;第三行为Berkeley模型。
表1 前车静止时事故案例
事故案例主车车速/(km/h)初始车距/m最小车距/m是否碰撞 A15069.394 718.740 8否 3.046 3否 7.074 1否 A24055.089 815.106 3否 3.884 4否 8.773 2否 A36081.868 722.768 4否 1.158 1否 4.310 9否
表2 前车匀速行驶时事故案例
事故案例主车车速/(km/h)初始车距/m最小车距/m是否碰撞 B150.0013.358 012.764 8否 8.378 4否 7.074 0否 B258.7836.792 328.458 3否 11.375 1否 9.246 2否 B380.0027.376 425.027 3否 11.136 2否 8.847 5否 B4100.0056.324 447.362 7否 0是 0是 B5102.0023.115 621.466 9否 10.8952否 8.669 5否 B6120.00110.441 974.208 8否 2.600 00否 0是
通过比较各碰撞案例中添加不同AEB控制策略后的最小车距,说明AEB能够有效避免大多数交通事故中追尾碰撞事故的发生。车辆以中低速行驶时,三种模型都可以有效避免碰撞,而Mazda模型比较保守,Honda模型和Berkeley模型比较激进。在高速行驶过程中,Mazda算法依然可以有效避撞,而Honda和Berkeley因制动临界距离过小,往往来不及在安全距离内制动停车,发生追尾碰撞,为了进一步研究AEB对事故影响,对高速行驶时发生碰撞的事故案例B6进行详细分析。
表3 前车制动减速时事故案例
事故案例主车车速/(km/h)初始车距/m最小车距/m是否碰撞 C143.9722.347 118.536 4否 9.155 2否 8.232 0否 C264.9332.825 430.342 6否 6.089 4否 1.993 7否 C3114.2362.892 054.497 5否 8.935 1否 5.481 5否
3.2 碰撞事故案例分析
在事故案例B6中,主车以33.3 m/s的速度向前行驶,前车速度为3.075 m/s,两车开始时相距110.44 m,由于驾驶员没有及时采取制动,两车在4.96 s后相撞,此时两车相对速度为22.26 m/s。下面分析添加AEB控制策略后事故的差异性。
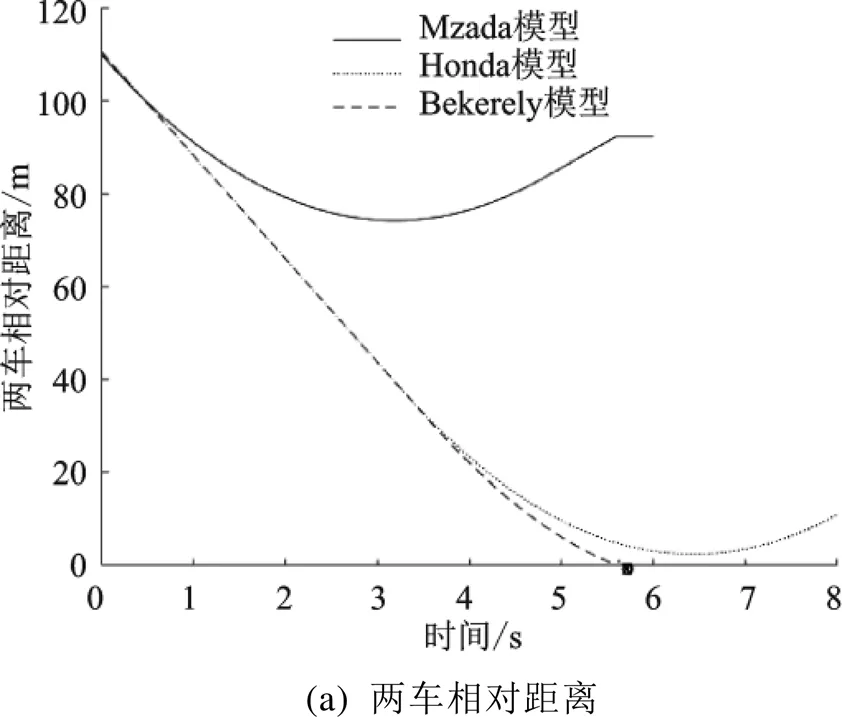
仿真测试结果如图3所示,Mazda模型在测试开始便采取制动,以6 m/s2的减速度减速,在距前车74.21 m时刹停,成功避免事故发生,但过大的制动临界距离不利于驾驶员的正常驾驶,也容易干扰正常道路通行;Honda模型在距离前车38 m时开始制动,经过3.18 s将速度减至3.075 m/s,此时与前车速度相等,两车之间距离最小,相距2.6 m。虽然Honda模型成功避免碰撞,但在高速行驶时激进的算法判定使得与前车距离过近,容易造成追尾事故的发生;Berkeley模型在距前车30.9 m时才开始制动减速,经过2.07 s速度减至18.84 m/s时与前车碰撞。Berkeley的算法也比较激进,尤其是在高速行驶时过小的制动临界距离容易发生追尾事故。在添加AEB控制策略之前,碰撞时两车的相对速度为22.26 m/s,安装AEB之后为7.77 m/s。虽然伯克利模型没有成功避免碰撞,但却使碰撞时的冲击能量减少了88%,极大地降低了碰撞对车身以及成员造成的危害。
4 结论
基于安全距离算法的AEB模型都可以有效避免碰撞或减轻事故危害程度,其中,Mazda模型的算法过于保守,高速行驶场景下适应性较好,可以有效避免事故,但在低速行驶时跟车距离过远容易造成交通流拥堵;Honda模型算法较为激进,低速和高速行驶车跟车距离都比较近,不利于行驶安全性;Berkeley算法在中低速时适用性较好,但在高速行驶时判定激进,制动临界距离过小,容易发生追尾碰撞。
[1] 李朋.汽车主动防撞系统控制模式的研究[D].南京:南京航空航天大学,2012.
[2] YOSHIDA H,OMAE M,WADA T.Toward Next Active Safety Technology of Intelligent Vehicle[J].Journal of Robotics and Mechatronics,2015,27(6):610-616.
[3] 陆一弘.PreScan/CarSim/Simulink联合仿真方法研究[J].佳木斯大学学报(自然科学版),2020,38(5):118-121.
[4] 栾铭湧,吴立香,郭鹏,等.基于PreScan和Trucksim模型在环测试研究[J].重型汽车,2020(3):4-5.
[5] 刘贝贝.汽车AEB控制仿真与优化[D].杭州:浙江科技学院,2020.
[6] 来飞,黄超群,董红亮.智能汽车自动紧急避撞系统的安全距离模型及其对比分析[J].重庆理工大学学报(自然科学),2020,34(9):39-46.
[7] 姜家如,刘君程,宋绍文,等.基于Prescan进行CIDAS场景建设[J].汽车实用技术,2021,46(6):58-59.
[8] 庄琼倩,陈波,吴贤静.基于Prescan的自然驾驶场景构建与研究[J].汽车实用技术,2021,46(7):30-31.
AEB Effect Test Based on CIDAS Collision Accident Simulation
SHEN Yubo, LU Yibin, WANG Yi, GUO Lun
( School of Automobile, Chang'an University, Xi'an 710064, China )
Based on the analysis of the applicability of three different autonomous emergency braking (AEB)control models in different crash scenarios, and the China in-depth accident study (CIDAS) China traffic accident in-depth research database, PreScan software is used to build the accident scene, and Simulink is connected to add the vehicle control model, and the real collision scene is tested by reconstructing the CIDAS traffic accident database. The simulation results verify that the autonomous emergency braking (AEB) control strategy based on the safety distance model can effectively avoid rear-end collision accidents or mitigate the harm caused by collisions, among which the Mazda model algorithm is relatively conservative and suitable for high-speed scenarios, and the Honda model algorithm and Berkeley model algorithm are relatively radical and suitable for medium and low-speed scenarios, which provides a reference for the evaluation and improvement of active safety technology.
Autonomous emergency braking; Safe distance model; Braking critical distance; Test and evaluation; Scene construction
U467.3
A
1671-7988(2023)19-46-04
10.16638/j.cnki.1671-7988.2023.019.009
沈钰博(1999-),男,硕士研究生,研究方向为驾驶行为及汽车安全,E-mail:597321741@qq.com。
猜你喜欢
汉语世界(The World of Chinese)(2021年4期)2021-09-05
少先队活动(2021年2期)2021-03-29
中学生数理化(高中版.高二数学)(2019年6期)2019-06-24
青少年科技博览(中学版)(2019年1期)2019-04-25
小学生导刊(2018年34期)2018-12-18
好日子(2018年9期)2018-10-12
中国公路(2017年7期)2017-07-24
山东青年(2016年3期)2016-02-28
中国卫生(2015年4期)2015-11-08
母子健康(2015年1期)2015-02-28