
电动汽车充电的分布式共识控制研究
2023-10-20 09:00温兵兵詹静霞
机械设计与制造工程 2023年9期
李 凡,温兵兵,詹静霞,汪 进,李 松
(湖北华中电力科技开发有限责任公司,湖北 武汉 430074)
为尽量减少电动汽车(electric vehicle,EV)充电对电网可能造成的不利影响,应采用集中式、分散式或分布式控制策略提高对电动汽车的充电控制水平[1]。集中式充电控制通过单一的中央控制单元来管理电动汽车的充电功率和充电时间[2]。文献[3]提出了一种集中协调的电动汽车充放电调度方法,该方法同时考虑了电动汽车用户经济性和对配电网的约束,仿真结果表明,该方法缓解了不强制执行电压约束时可能发生的不合规电压偏差,与不协调的电动汽车充电相比,该方法可明显降低电动汽车用电的运营成本。集中式充电控制方式虽然易于实际应用,但当将其应用于大规模电动汽车充电问题时,将导致计算和通信成本偏高,在集中式控制主机丢失的情况下容错能力低[4]。分散式控制采用层次控制结构,它通过系统中不同设备之间的通信完成信息交互[5]。文献[6]提出了一种考虑光伏逆变器和电动汽车有功及无功补偿的分散式电压控制算法,结果表明,所提算法能有效解决电网电压调节问题。与集中式控制方法相比,分散的电动汽车充电控制降低了对通信量的要求,并提高了计算效率[7]。但分散式控制策略中各自独立的计算机系统之间资源或信息的交换或共享较弱,存在大量的数据冗余及数据不一致性,维护成本高[8]。
分布式控制策略是将分散式控制策略推向极限的方法,与分散式控制策略相比,分布式控制策略中各自独立的计算机系统之间资源和信息的交换或共享频繁,数据冗余量小,访问速度快,因此计算和通信成本比其他两种控制策略低得多。针对多辆电动汽车的充电需求问题,文献[9]提出了一种基于需求的台区柔性资源分布式协调策略,算例分析表明,所提出的分布式控制器可提高发电量可变情况下的交直流混合微电网的安全、经济运行能力,同时可满足多辆电动汽车充电需求;文献[10]给出了一种电动汽车充电分布式协同控制策略,并采用dSPACE进行实时仿真验证了该控制策略的优越性。在分布式控制策略中,共识算法已被广泛用于解决涉及电动汽车的各种实际问题中,例如频率调节、高效充电、电动汽车放电、使用Karush-Kuhn-Tucker条件的电动汽车合作充电、考虑变压器层次结构的电动汽车充电等。
现有研究并没有同时考虑最大限度地减少对通信量和计算资源的需求以及电动汽车电池内阻造成的功率损失,为解决该问题,本文提出一种基于分布式共识算法和图论的电动汽车充电控制方法。为验证所提出的电动汽车充电控制方法的有效性,分别对10辆和100辆电动汽车充电站实际案例进行分析,验证所提出的电动汽车充电控制方法的有效性。
1 基于分布式共识算法和图论的电动汽车充电控制方法
假设充电站有一定数量的充电插座和一定的协议功率值来给一定数量的电动汽车充电。每辆电动汽车在充电过程中代表一个购电代理。该充电站与电动汽车用户一起工作,告知他们开始充电的时刻、已充电时间和电动汽车的荷电状态(state of charge,SOC)。
如图1所示,电动汽车通过充电站插座构成一个物理连接层,每辆车与其相邻电动汽车的通信构成如图2所示的通信层。控制算法通过通信层交换所需的信息,并获得与预定义目标相关的协议,即根据电动汽车的已充电时间和荷电状态进行充电。

图1 电动汽车充电站物理连接

图2 电动汽车充电站通信层
采用图论来模拟相互连接的电动汽车通信网络,采用离散时间分布式共识算法实现信息交换,电动汽车和其相邻电动汽车之间交换的信息为增量成本和功率偏差。
1.1 电动汽车初始参数
电动汽车充电控制模型中所有电动汽车电池容量参数均取自市场上实际的电动汽车,有现代INONIQ电动车(2020),电池容量38.3 kW·h;雷诺Kangoo Z.E(2017),电池容量33 kW·h;大众e-Golf(2017),电池容量36 kW·h;雷诺ZOE R110 ZE40(2018),电池容量41 kW·h;宝马i3电动汽车(2018),电池容量42.2 kW·h(2020)。由于建模时所用的电池容量单位是A·h而不是kW·h,因此需将以单位kW·h表示的功率QkWh转化为以单位A·h表示的功率QAh:
(1)
式中:Vnom为电动汽车电压。
为保证充电时间较短的电动汽车拥有较高的充电优先级,使用优先级因子ρi:
(2)
式中:Si(k)为第i辆电动汽车在时刻k的荷电状态;Ti为第i辆电动汽车在充电站停留的时间,h;ΔT为采样周期,h。
定义30%的电动汽车的停留时间为3.0~4.0 h,其他电动汽车的停留时间为4.5~6.0 h。在这两个不同的区间内,每个电动汽车停留时间的选择是通过均匀分布随机生成的。模型其余参数见表1,表中Voc,i、Ri、QAh,i、Si、Si(Ki)分别为第i辆电动汽车电池的开路电压、电池内阻、电池容量(以A·h为单位)、第i辆电动汽车的初始荷电状态和最终荷电状态。

表1 电动汽车参数
1.2 图论和离散时间共识算法
1.2.1图论
图G用G=(V,E)定义,其中V={1,2,…,n},表示一组节点,E=(i,j)⊆V×V,表示一组边。对于为电动汽车提供充电服务的充电站,其图中每个节点代表1辆电动汽车。节点i表示第i辆电动汽车,而边(i,j)表示第i辆电动汽车和第j辆电动汽车之间的连接。第i辆电动汽车的相邻电动汽车定义为Ni={j∈V|(i,j)∈E}。为电动汽车提供充电服务的充电站使用的图类型是无向图,即边(i,j)可以将信息从购电代理i传递给购电代理j,反之亦可以。
1.2.2离散时间共识算法
离散时间共识算法可通过式(3)实现,考虑跟踪误差估计的共识算法可以用式(4)表示。
(3)
(4)
式中:xi[k+1]为(k+1)时刻第i个购电代理的最新信息;xj(k)为第j个购电代理在时刻k的信息;ε为控制系数;dij为随机权值系数,它影响算法的收敛速度;δ(k)为跟踪误差。
随机权值系数dij定义为:
(5)
式中:ni、nj分别为购电代理i和购电代理j的相邻电动汽车数。
为了使算法收敛,权值矩阵D(dij的集合)必须具有以下性质:1)行和列的总和必须等于1;2)D的所有特征值的绝对值必须不大于1。
1.2.3算法迭代规则
使用的共识算法基于以下方程迭代执行:
(6)
(7)
(8)
(9)

2 仿真研究与结果分析
通过对某地两个充电站实际案例的仿真研究,验证所提电动汽车充电控制方法的有效性,案例中所用电动汽车参数和充电站数据均来自这两个实际充电站。
2.1 案例1
在案例1中,充电站有10个插座,可为10辆电动汽车充电。随机选取第4、6和9辆电动汽车(EV4、EV6和EV9)使其停留时间比其他电动汽车短,分别在站停留3.5 h、3.0 h和4.0 h后离开,其余的电动汽车在4.5 ~6.0 h范围内随机选择停留时间,目的是证明所提方法对电动汽车随机退出充电的适应性。
可用充电功率设置为34 kW,模拟时间步长为5 min。购电代理之间的信息交换每0.01 s进行一次。控制系数设置为5 × 10-6。每辆电动汽车有4个相邻电动汽车,根据它们在通信层中的组织方式与相邻的电动汽车进行通信(图2)。
根据表1定义的参数进行模拟实验。图3和图4分别为反映增量成本和功率偏差收敛性的曲线。

图3 案例1中10辆电动汽车的增量成本曲线
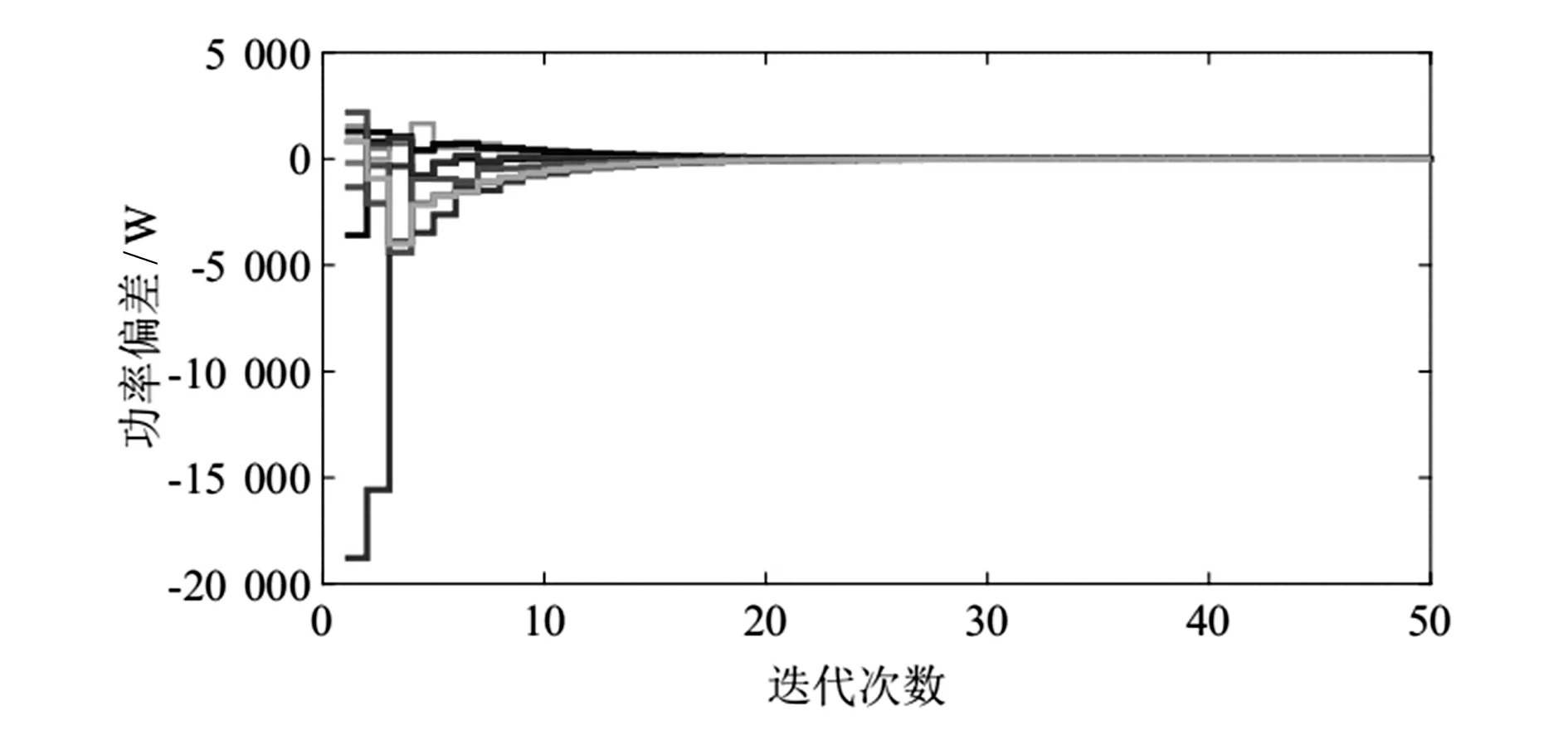
图4 案例1中10辆电动汽车的功率偏差曲线
由图可以看出,收敛发生在接近30次迭代时,算法收敛时间接近0.3 s(30×0.01 s)。增量成本在接近30次迭代时收敛于接近0,表明充电代理能够在0.3 s内就将需要分配的充电功率值分配完成。功率偏差在接近30次迭代时收敛于接近0,表明电动汽车能够充分利用可用功率。图5给出了在3.0 h 、3.5 h和4.0 h离开充电站的EV6、EV4和EV9的电池的参考电流和充电电流。每辆电动汽车的启动时间接近,且它们的充电电流接近参考电流,因此本文不考虑电动汽车启动时间对充电控制的影响。同时对多辆电动汽车充电和这些电动汽车单独充电的功率和之间有一个小误差。对于EV6,这个误差在开始充电时相对较小,随着充电时间的增加,该误差将会变得越来越小,当出现电池充电电流大于参考电流时,EV6的在站时间已经接近设定的停留时间。同样的情况也出现在EV4和EV9的充电过程中。

图5 案例1中提前离开充电站的电动汽车的参考电流和充电电流曲线
图6给出了所有电动汽车在4.0 h充电期间消耗的功率。与其他电动汽车相比,EV4、EV6和EV9消耗了更多的功率。这是因为,在充电站停留时间越少,电动汽车的充电优先级越高。在EV6离开充电站之后,之前分配给EV6的电力会重新分配给其他电动汽车。该结果充分证明了所提出电动汽车充电控制方法对电动汽车随机退出充电的适应性。当EV4和EV9离开充电站后,之前分配给它们的电力也会重新分配给其他电动汽车。

图6 案例1中所有电动汽车在4.0 h充电期间消耗的功率曲线
如图7中所有电动汽车的荷电状态曲线所示,随着退出充电时间的临近,电动汽车的荷电状态正在接近它们的预期荷电状态。
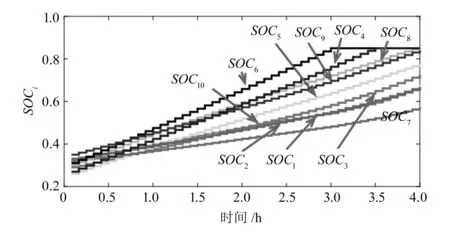
图7 案例1中电动汽车的荷电状态曲线
电动汽车可用总功率和消耗总功率曲线如图8所示。由图8中放大的功率曲线可以看出,电动汽车突然离开充电站会导致电动汽车消耗总功率产生波动,但波动幅度不大。

图8 案例1中电动汽车可用总功率和消耗总功率曲线
2.2 案例2
与案例1不同,案例2园区充电站有100个充电插座,可同时为100辆电动汽车充电。在这100辆电动汽车中,30辆被配置为在3.0 h、3.5 h或4.0 h退出充电,用以证明算法的可扩展性及其对该场景中电动汽车随机退出充电的适应性。剩下的70辆电动汽车的停留时间随机设置为4.5~6.0 h。可用充电功率设置为340 kW,模拟时间步长为5 min。电动汽车之间的信息交换每0.01 s进行一次。控制系数定义为5×10-6。每辆电动汽车有10辆相邻电动汽车,通信方式与案例1相似。
所提电动汽车的充电控制方法对增量成本和功率偏差的控制曲线分别如图9和图10所示。与案例1类似,通过所提电动汽车充电控制方法对增量成本和功率偏差的控制,经过2 500次迭代,即25 s(2 500 × 0.01 s)时长,100辆电动汽车的增量成本和功率偏差均能收敛于接近0。收敛时间与案例1明显不同,这是由于案例1中只考虑了10辆电动汽车,案例2考虑了100辆电动汽车,电动汽车充电过程和电动汽车间的信息交互远比案例1复杂。

图9 案例2中100辆电动汽车的增量成本曲线
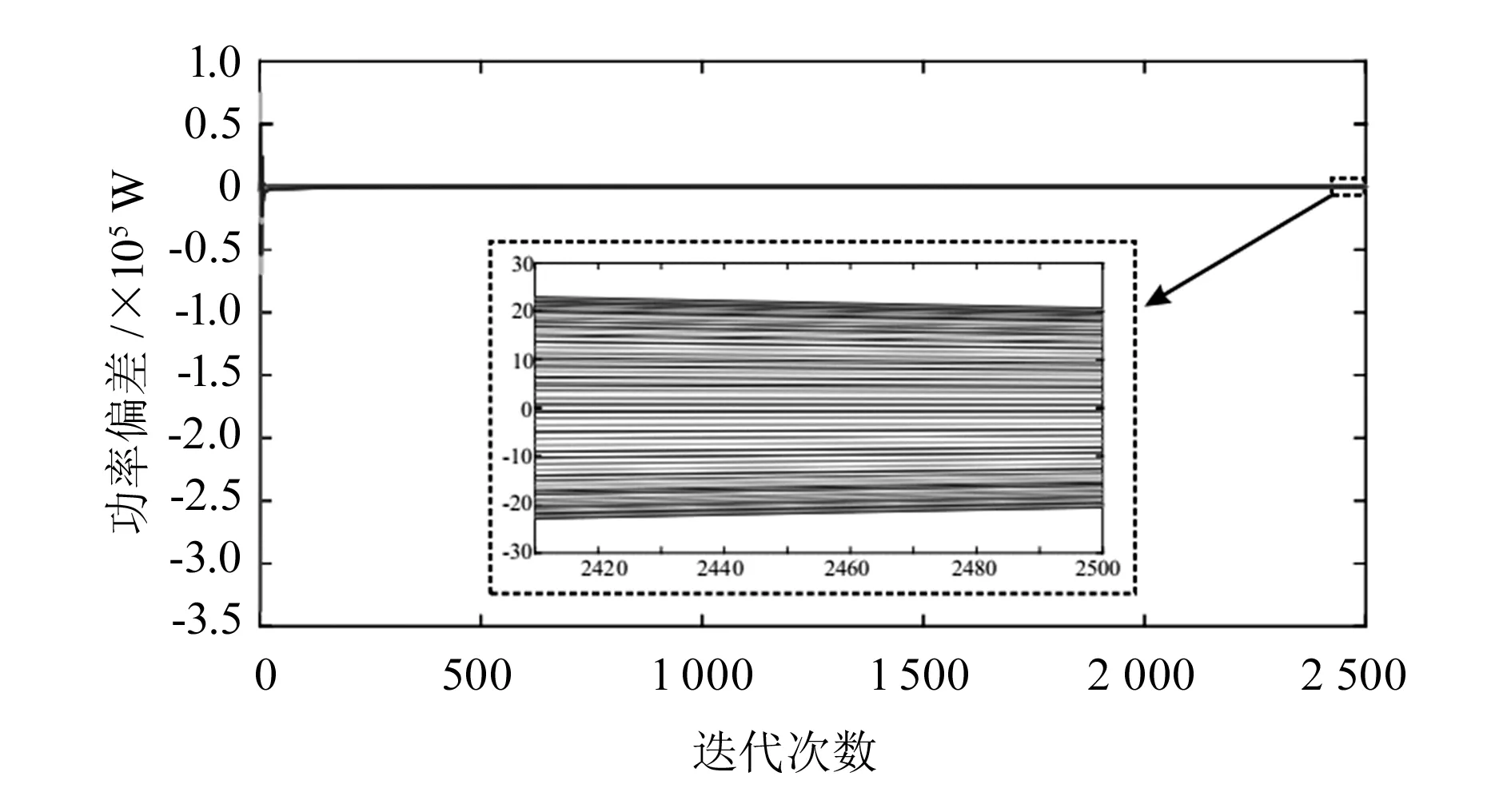
图10 案例2中100辆电动汽车的功率偏差曲线
充电站的总可用功率和消耗的总功率曲线如图11所示。通过利用所提方法对电动汽车充电的优化控制,电动汽车可以最大限度地利用充电站的可用功率。总可用功率和消耗的总功率之间的偏差主要由充电3.0~4.0 h的30辆电动汽车随机离开充电站引发。
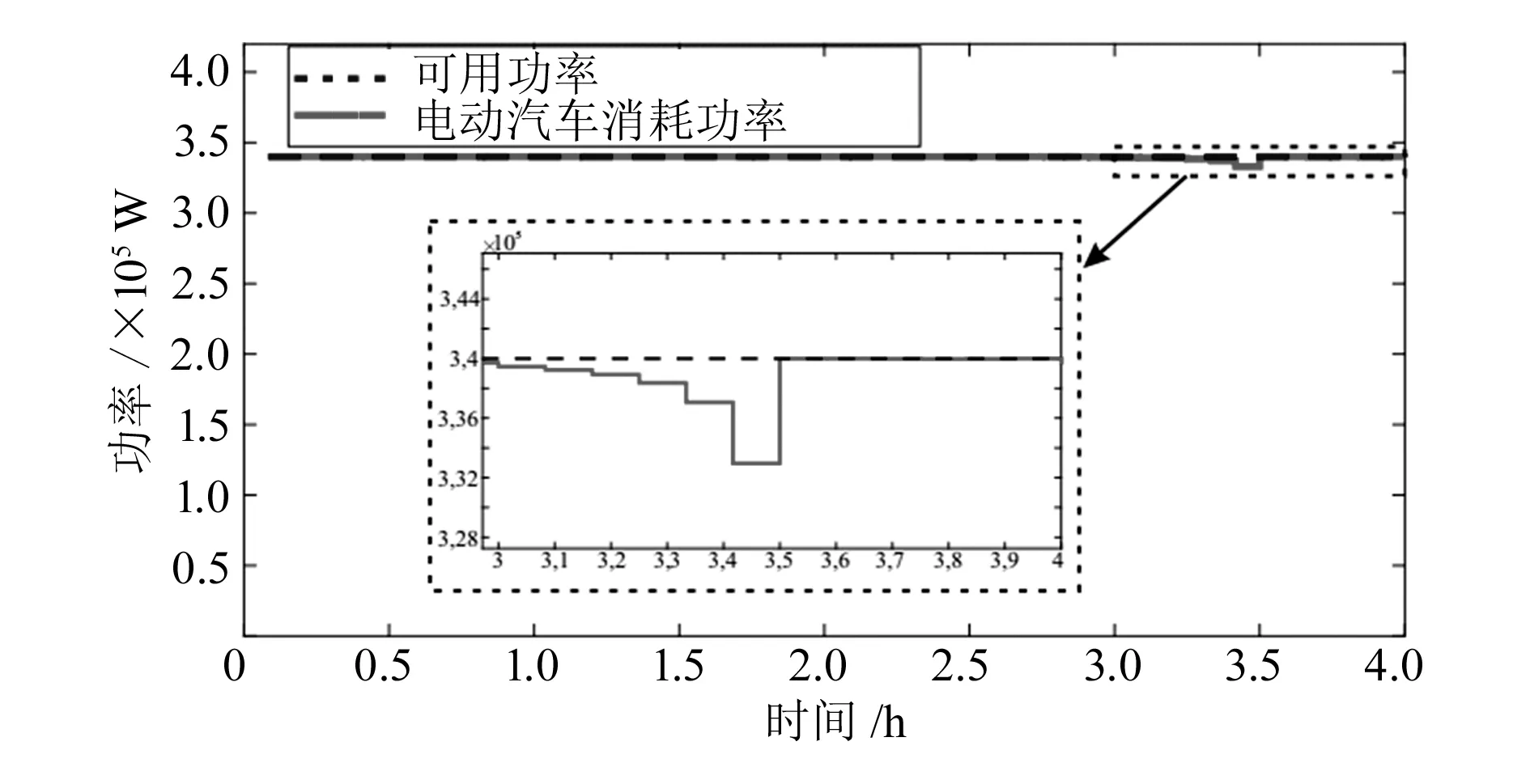
图11 案例2中充电站总可用功率和消耗总功率曲线
提前离开充电站的30辆电动汽车的荷电状态曲线如图12所示,随着退出时间的临近,电动汽车的荷电状态正在接近它们的预期荷电状态。
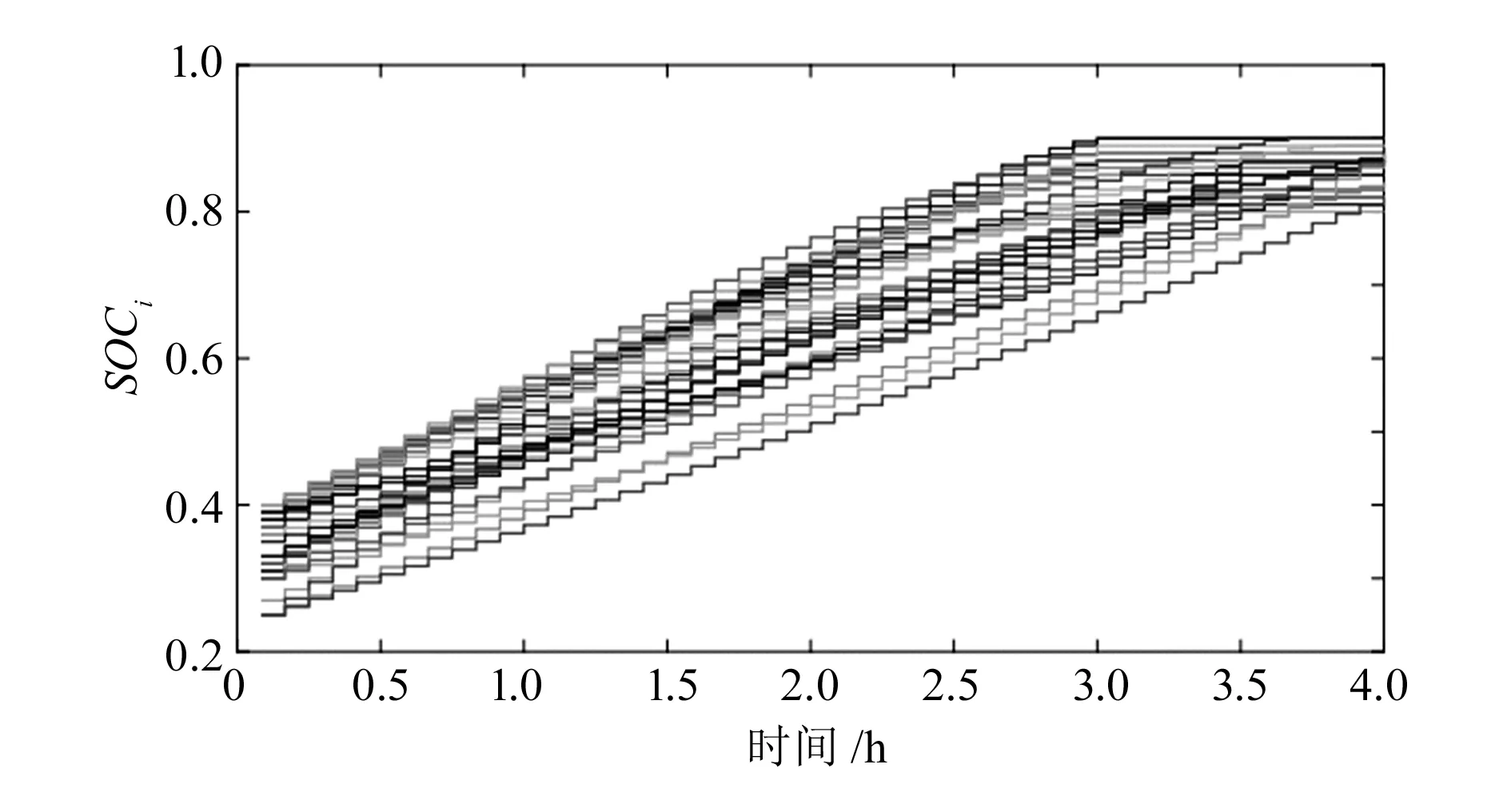
图12 案例2中提前离开充电站电动汽车的荷电状态曲线
3 结论
本文提出了一种基于分布式共识算法和图论的电动汽车充电控制方法,实现低通信量和计算资源需求,最大限度地减少电动汽车电池内阻造成的功率损失。为验证所提出的电动汽车充电控制方法的有效性,分别进行了10辆和100辆电动汽车的充电站实际案例实验验证,结果表明,所提出的电动汽车充电控制方法可有效使电动汽车增量成本和功率偏差快速收敛于零值附近,该方法对电动汽车的随机退出也具有良好的适应性。当有电动汽车离开充电站时,充电站可将已离开电动汽车的参考功率重新分配给仍留在充电站的电动汽车,因此所提出的电动汽车充电控制方法能够实现电动汽车有效负载的精确分布控制。
猜你喜欢
机电安全(2022年5期)2022-12-13
环球时报(2020-12-08)2020-12-08
房地产导刊(2020年6期)2020-07-25
智富时代(2019年6期)2019-07-24
智富时代(2019年6期)2019-07-24
测控技术(2018年11期)2018-12-07
电源技术(2017年1期)2017-03-20
电源技术(2016年9期)2016-02-27
电源技术(2015年5期)2015-08-22
电测与仪表(2014年24期)2014-04-09
