
钩爪式四足爬壁机器人控制系统设计
2023-10-20 09:00余淑荣徐品东张来喜龚宇强
机械设计与制造工程 2023年9期
余淑荣,徐品东,张来喜,龚宇强
(兰州理工大学机电工程学院,甘肃 兰州 730050)
随着科学技术的不断进步与发展,国内外出现了很多爬壁机器人,这些机器人不仅可以在人类难以到达的环境工作,而且能够提升工作效率和质量。其中控制系统的好坏是决定爬壁机器人能否在壁面稳定爬行的关键因素,引起了国内外专家的广泛关注。
Dickson和Miller等[1-3]为解决爬壁机器人结构鲁棒性不足的问题,研究出了一款微型两足机器人BOB(bipedal oscillating robot),此机器人控制方案简单、机身轻,通过对脚掌上类似于Rise机器人[4]的柔性钩爪结构进行改进,实现了其在粗糙竖直壁面上的攀爬。陈东良等[5]设计了一种六足钩爪式爬壁机器人,此机器人足部可根据壁面粗糙程度自行调整起伏,具有自适应性。赵智慧[6]开发了能够在粗糙的垂直面上以对角步态快速爬行的钩爪式四足爬壁机器人。刘彦伟等[7]设计了一款轮足混合爬壁机器人,此机器人采用单电机驱动,同时实现了足部的主动抬起与放下,经过实验测试,该机器人能在砖面、水泥墙面等粗糙壁面上爬行。Nagaoka等[8]研制了一种轻量化四肢爬壁机器人,此机器人每个肢体上都装有被动脊椎夹持器,能够被动地、自适应地锁定在悬崖上粗糙岩石表面的微观微凸体上,可以安全地在崎岖陡峭的斜坡上进行攀爬。
机器人的稳定爬行离不开控制系统,控制系统如同机器人大脑一般,控制机器人的前进方向、速度等。因此,本文针对钩爪式四足爬壁机器人控制系统进行设计,验证此控制系统能够使爬壁机器人在粗糙壁面上自主稳定地爬行,拓展爬壁机器人在粗糙墙壁环境中的应用。
1 爬壁机器人的步态规划
步态规划是机器人控制系统设计的基础,步态规划的好坏直接影响控制系统的复杂程度,故在设计四足爬壁机器人控制系统之前,首先对步态规划进行系统分析。
爬壁机器人步态的规划主要根据机器人足数与腿部安装位置、腿部机构的运动形式及机器人的使用环境等因素进行设计。为保证四足爬壁机器人在爬行的过程中能够一直抓附在壁面上,其腿部不能同时抬起。在腿部运动的过程中,其抓附相与脱离相的相位角相差180°,故本文对机器人步态的具体规划如下:将爬壁机器人的4条腿分为2组,机器人前端2条腿为一组,后端2条脚为一组,同组腿部运动的角速度及相位角相同,不同组腿部机构运动的相位角相差180°,这样可以保证机器人在壁面爬行的每一时刻都有一组脚爪抓附在壁面上,为机器人提供附着力,保证机器人能够一直抓附在壁面上。
本文利用ADAMS对爬壁机器人在壁面上爬行的过程中其腿部的运动情况进行仿真分析。因为同一组内的2条腿运动相同,所以只要分析同一侧不同组的2条腿就可以得到整个机器人腿部的运动情况。机器人在壁面上爬行一个周期的腿部运动情况如图1所示。
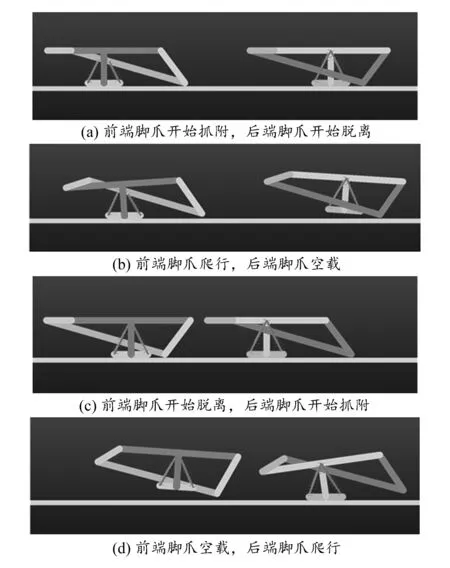
图1 机器人在壁面上爬行一个周期的腿部运动情况
图1(a)为初始状态,爬壁机器人腿部的前端两脚爪开始进入抓附阶段,后端两脚爪开始进入脱附阶段,机器人因前端两脚爪作用而抓附在壁面上;图1(b)为爬壁机器人前端两脚爪进入爬行阶段,后端两脚爪抬起进入空载阶段,前端脚爪将会与尾部形成支撑平面使爬壁机器人机身撑起,防止机身与壁面发生摩擦,并为爬壁机器人提供动力使其向上运动;图1(c)为爬壁机器人后端两脚爪开始从空载阶段转换为抓附阶段,即后端脚爪重新抓附到壁面上,而前端两脚爪开始由爬行阶段转换为脱附阶段,即机器人前端脚爪将脱离壁面,在这个阶段,爬壁机器人腿部上的两组脚爪在壁面上完成交替抓附;图1(d)为爬壁机器人后端两脚爪进入爬行阶段,为机器人提供向上的动力,使其向上运动,而前端两脚爪抬起进入空载阶段,脱离壁面,此阶段机器人腿部两组脚爪的运动刚好与第二阶段相反。至此爬壁机器人在壁面上完成一个运动周期。
通过ADAMS仿真软件对爬壁机器人腿部的4只脚爪在运动过程中沿z向的位移进行分析,得到的位移曲线如图2所示,其中机器人前端两脚爪的位移曲线为实线,后端两脚爪的位移曲线为虚线。从图2可以看出,当实线在虚线下方时,说明机器人前端两脚爪抓附墙面,而虚线在实线下方时,则变成机器人后端两脚爪抓附墙面,两曲线交点大约在z=-5.1处,说明壁面处于z=-5.1处。同时,从图2还可以看出,任意时刻均有至少一条曲线处于直线z=-5.1的下方,这说明机器人在壁面上爬行的整个过程中,一直有脚爪抓附在壁面上。
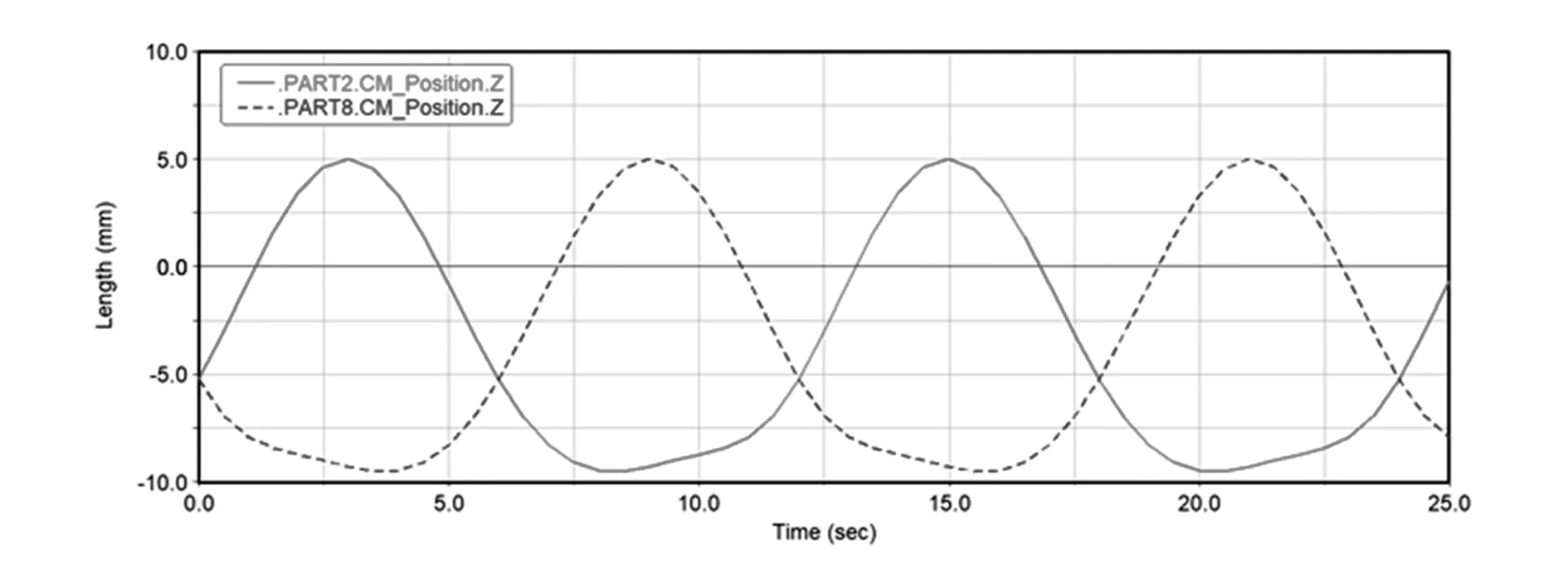
图2 机器人腿部的4只脚爪在运动过程中沿z向的位移
爬壁机器人在壁面上爬行时,其脚爪稳定抓附壁面后便与壁面保持相对静止,而机体在舵机的作用下沿壁面向上运动,故在机器人爬壁过程中,脚爪中心的实际运动轨迹如图3所示。在图3中,A点为机器人开始抓附壁面时脚爪所处的位置,A点处的切线几乎与壁面垂直,这表明脚爪在抓附壁面时,其速度方向几乎与壁面垂直,与前文对机器人单个脚爪运动方案的设计要求相同;爬壁机器人脚爪在B点处从壁面上脱附,B点处的速度方向可分解为沿壁面向上和垂直壁面向外,而两个方向的运动均有利于爪刺沿壁面拔出,保证脚爪能顺利脱离壁面。

图3 机器人脚爪中心的实际运动轨迹
重心是指地球对物体中每一微小部分引力的合力作用点,分析重心的运动轨迹对分析爬壁机器人运动的稳定性具有重要意义。故本文对爬壁机器人在一个运动周期内重心的运动轨迹进行分析,得到重心运动轨迹曲线如图4所示,同时也得到重心沿x向和z向运动的位移曲线如图5(a)、(b)所示。从图4可以看到,机器人重心的运动轨迹与脚爪的实际运动轨迹相似,都是倒C形。从图5(a)可以看出,机器人的重心在一个运动周期内沿x向前进了70 mm。从图5(b)可以看出,在运动过程中,机器人重心在z向的最小高度为11.7 mm,最大高度为14.9 mm,则最大起伏值为3.2 mm,造成这一情况的主要原因是由于脚爪在抓附壁面的过程中会向着壁面运动,导致机器人重心略微抬起,但相较机身的高度而言,重心上下起伏距离依然很小,基本不影响机器人抓附壁面。同时,从图5(b)也可以看出,由于机器人重心距离前端脚爪与后端脚爪的距离不相同,使得在同一周期内机器人重心沿z向位移的2个峰值并不完全相同。

图4 机器人重心的运动轨迹
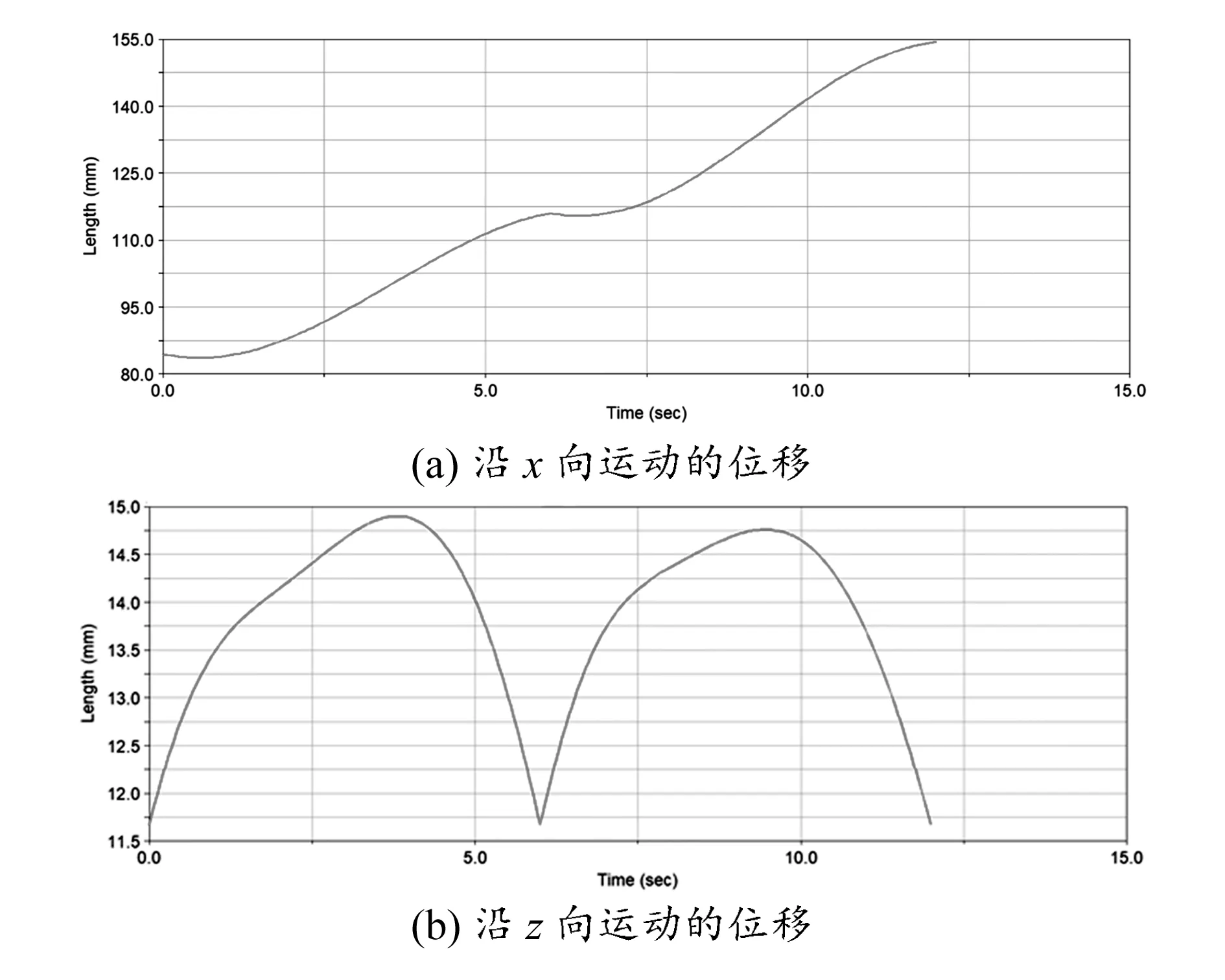
图5 机器人重心位移
2 爬壁机器人控制系统设计
爬壁机器人控制系统的主要作用是实现机器人的自主运动。控制系统要结合机器人的运动机构进行设计,故本文对控制系统的设计提出以下3点要求:1)控制系统中的硬件集成度应尽量高,且尺寸应尽量小,以减小控制系统的尺寸与质量;2)控制系统硬件应尽量布置在同一层,以减小机器人重心高度,提高机器人爬壁稳定性;3)控制系统应能同时控制机器人的4只脚爪,保证4只脚爪能够实现独立运动。
综合以上因素,选用Arduino舵机控制板作为爬壁机器人的核心控制器,其中央控制芯片为ATmega328P。ATmega328P是基于Atmel 8位AVR RISC的微控制器,具有32 KB ISP的闪存和读写能力,拥有32个通用工作寄存器、6通道10位A/D转换器,其吞吐量接近1 MIPS,具有高性能、低功耗和运行速度快等特点。Arduino舵机控制板上有6路舵机接口,可控制6路舵机;具有手柄接口,支持手柄远程操作;还有蓝牙接口,支持安卓系统app远程控制。此外,Arduino舵机控制板还提供了多种传感器与驱动接口,可外接多种传感器及驱动模块。该控制板接口多,功能强大,完全满足本文对控制系统的要求。
由于爬壁机器人要求驱动元件速度可调,故其常用的驱动电机有步进电机、直流伺服电机和舵机。其中步进电机依靠电脉冲信号来控制角度与转动圈数,因为其转动为开环控制,所以精度不如伺服电机,且低速时容易发生低频振动现象。直流伺服电机虽然能进行速度调节,但其转速高、输出转矩小,而机器人向上爬行时脚爪部分所受的载荷较大,需要电机提供较大的力矩保证爬行,如果使用直流伺服电机作为机器人的驱动元件,就要同时配合使用具有较大传动比的减速装置来对电机进行减速,以提高伺服电机输出转矩,保证机器人有足够的动力向上爬行。因为舵机由伺服电机和减速齿轮组组成,所以舵机具有伺服电机运动精度高、稳定等优点,并且舵机将减速齿轮组直接装入电机中,免去了额外安装减速机构的麻烦,还使驱动机构的结构更加紧凑,整体质量更轻,且价格便宜,控制方便。
综合考虑,本文选择舵机作为爬壁机器人的驱动电机。舵机分为180°舵机、270°舵机和360°舵机,其中180°舵机和270°舵机是通过PWM信号精确控制角度,广泛用于机械臂的控制。而360°舵机可以进行360°循环转动,采用闭环控制并使用PWM信号精确控制舵机转速,保证其运动速度稳定可靠。
由于本文的四足爬壁机器人的运动机构为曲柄摇杆机构,而曲柄需要360°转动来为机器人提供持续运动,因此本文采用微雪电子的MG90S 360°舵机。舵机质量为9 g,工作电压为4.8 ~6.0 V,依靠控制系统发送PWM脉冲来控制舵机速度。为保证机器人动力充足,本文选择电机输入电压为6.0 V,此时最大扭矩为2.8 N·m。通过ADAMS对机器人的运动进行仿真,得到恒转速状态下电机轴输出力矩曲线,如图6所示。在图6可以看出,恒转速状态下电机轴输出扭矩最大值为9.12 N·mm,远小于电机在6.0 V电压工作下的最大扭矩2.8 N·m,所以该电机能满足本文所设计爬壁机器人的动力要求。

图6 恒转速状态下电机轴输出力矩曲线
因为Arduino舵机控制板的输入电压范围为6.0~12.0 V,所以采用7.4 V航模电池作为爬壁机器人的电源,该电池容量为800 mA·h,放电电流为15C,质量为48 g,尺寸为50 mm×30 mm×15 mm。
机器人控制系统使用Arduino IDE进行编程。Arduino IDE由欧洲开发团队于2005年开发,其基于Java开源编写并应用于网络工程、物联网、机器人、艺术和设计等领域。Arduino IDE操作方便,兼容性好,可以在Windows、Macintosh OSX、Linux三大主流操作系统上运行。其编程语言基于wiring语言开发,不需要太多的单片机基础和编程基础,简单学习后,就可以快速进行开发。
3 爬壁机器人爬升实验
将控制系统硬件安装在钩爪式四足爬壁机器人的机身上,完成机器人总体样机的制作。机器人总体样机如图7所示,其总质量为317.3 g,中央控制板与电池直接固定于机身底部,而4个舵机与脚爪分别固定在机身两侧,机器人长300 mm、宽110 mm,其中机身长180 mm、高度为36 mm、尾部长120 mm。为验证爬壁机器人在粗糙壁面爬行的可行性,以及在机器人实际爬行壁面的过程中足部(由腿部机构和脚爪组成)抓附墙面的稳定性,将爬壁机器人放置在24目砂纸制作的模拟壁面上,对其爬升性能进行实验测试。
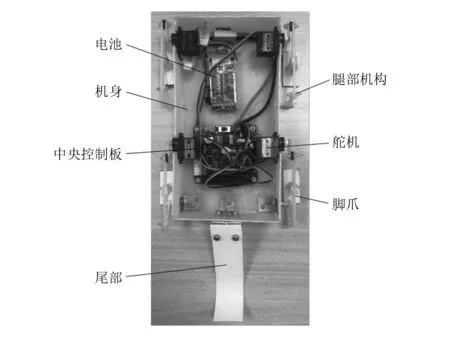
图7 钩爪式四足爬壁机器人样机图
经过多组实验测试,最终确定钩爪式四足爬壁机器人能在与水平面夹角小于80°的壁面上稳定爬行,爬行速度约为24 mm/s,如图8所示。
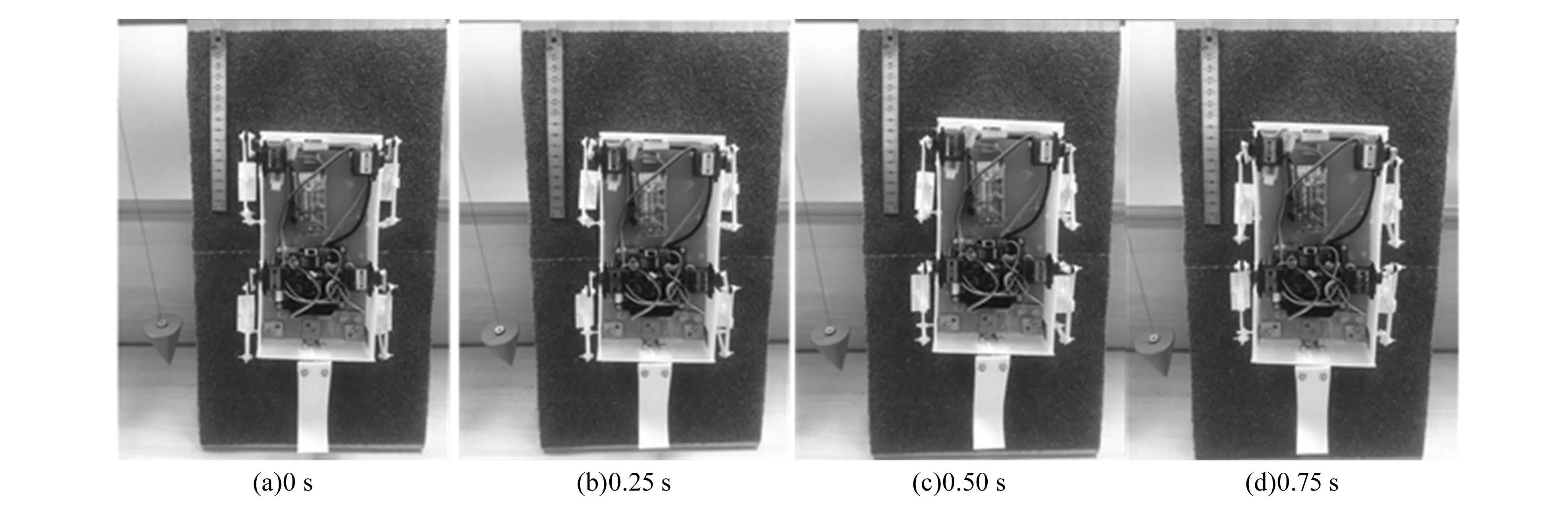

图8 爬壁机器人样机在80°壁面上爬行过程图
从图8可以看出,从0 s开始到第1.75 s,机器人爬行约42 mm。爬行过程中机器人前后脚爪做交替运动,运动过程稳定,无4只脚爪同时离开壁面的情况发生,同时也没有爪刺卡在壁面无法拔出的情况,脚爪在壁面上的抓附稳定可靠,各脚爪均无抓脱的现象。由于尾部机构的支撑作用,爬壁机器人机身始终与壁面存在一个空隙,保证了机器人机身不与壁面发生直接摩擦,且尾部材料与壁面摩擦系数小,在机器人运动过程中并不阻碍其向上爬行。
4 结束语
本文通过研究钩爪式四足爬壁机器人的结构和爬行方式对其步态进行规划,进行爬壁机器人控制系统的设计,控制机器人四足两两交替附着在粗糙壁面上,实现机器人在壁面上稳定爬行,同时制作了机器人样机,并在粗糙壁面上进行爬行实验,验证了爬壁机器人的性能。实验结果表明,此机器人可以在粗糙壁面上自主稳定地爬行,验证了控制系统设计的合理性和机器人结构设计的合理性,可以为今后爬壁机器人控制系统和结构的设计提供了参考。
猜你喜欢
红领巾·萌芽(2023年9期)2023-10-24
力学学报(2022年6期)2022-07-10
科教新报(2022年22期)2022-07-02
玩具世界(2022年2期)2022-06-15
中国特种设备安全(2021年12期)2021-04-26
新民周刊(2016年25期)2016-07-01
食品与生活(2016年6期)2016-06-16
广东石油化工学院学报(2016年6期)2016-05-17
恋爱婚姻家庭(2015年27期)2015-12-19
恋爱婚姻家庭·养生版(2015年9期)2015-05-14
