写字机器人书写特征鉴定的实验研究
——以METAL-20型为例
2023-10-22 01:45周懿恺黄益于奎栋
警察技术 2023年5期
周懿恺 黄益 于奎栋
1.上海市公安局长宁分局 2.上海市公安局奉贤分局 3.上海市公安局物证鉴定中心
引言
传统的笔迹摹仿类案件中,无论书写人出于什么目的,其犯罪行为中表现出一定是隐藏了个人书习惯与书写特征,刻意摹仿他人的书写习惯和书写特征,关于签名笔迹的鉴定研究已较为成熟,同时,随着技术革新发展,在纸张上提取书写人手印、DNA进行比对鉴定最终破案的案例不胜枚举,因摹仿字迹逼真,价格低廉,新型演进式仿生设备写字机器人的出现,将会影响甚至改变此类犯罪形态,虽然部分省、市的实战文检专家反馈,尚未发现此类案例,但不排除未来在更多的违法犯罪活动中会出现写字机器人身影。本次研究结合相关知识,通过写字机器人临摹的不同字迹,分析总结写字机器人的书写特征与正常书写间的差异,为今后类似案件鉴定提供参考。
一、现状分析及工作原理
(一)写字机器人相关研究现状
国内写字机器人受制于经济体制影响,相较于西方国家发展速度较慢,在“七五”计划以及相应高科技研究发展计划政策扶持下,逐渐开始起步。1999年我国在沈阳、哈尔滨、北京等地建立了数个写字机器人产业基地。从逐步建设产业化开始,国内写字机器人正式进入高速发展阶段,经过三十余年的研究与发展,国产写字机器人在国内外逐渐形成了市场化、规模化,一些技术难题获得突破。技术市场化后,带来了写字机器人合理使用与司法实践真伪鉴别的各种讨论与研究。
写字机器人被用于违法犯罪活动,对传统文件检验、司法鉴定带来了冲击,有关部门及研究员对此有着较高的关注度,朱明新在《写字机器人伪造签名字迹的鉴别》(2021)中提出写字机器人摹仿笔迹与常规的伪造方式套摹、临摹、描摹、亿摹或者简单的通过复制、粘贴、挖补等方式不同,具有更为丰富但相似的笔迹特征,故具有较强的迷惑性,会对实战笔迹鉴定产生一定的迷惑。
刘畅、黄钰等人在《写字机器人书写特征的识别与研究》(2020)中提到,写字机器人如今在深度学习神经网络技术中可能会有所涉及,通过AI深度学习,利用已知字迹来摹仿未知字迹,一旦使AI掌握了被摹仿人的书写特征,形成了和被摹仿人书写一致的笔迹风格,会给司法鉴定工作带来较大的挑战。
胡萍、成磊在《直线关节型书写机器人书写笔迹特征的研究》(2019)中,通过盲测实验,让149位刑事科学技术人员对样本进行鉴定,通过对鉴定意见的分析计算,最终出具的鉴定意见错误率高达49%,远高出2018年司法部笔迹鉴定盲测平均不通过率的7%,由此说明了书写机器人具有一定的书写水平,会对实际工作中笔迹鉴定的准确率产生巨大影响。
(二)写字机器人工作原理
1.写字机器人的控制
以本实验所使用的在网上购买的“十字形”写字机器人为例,设计者采用了作标定位法,计算笔迹轨迹的各像素点坐标,利用相应软件预览并标记每一个像素点的相对位置,事先固定好两个高精度电机,在其中x、y轴交接处电机上安装笔杆,按照预定程序在相应点位进行起落笔设定、速度设定、笔力设定等系列操控设定,从而可以顺利完成书写。
2.写字机器人汉字信息获取方式
目前写字机器人主要通过三种方式获取汉字信息:(1)直接利用电容笔在相应软件中录入个人字体后导入写字机器人适配字库,此方式最为简单,对技术层面求较低,但是容易受书写时主、观因素影响,可能会导致字迹与被摹仿字迹差异较大,尤其是在笔迹粗细上无法体现变化;(2)可将纸张上的人工书写的笔迹用高精度扫描仪扫描,然后使用Gcode工具描画路径,转换为矢量图导入字库,此方式入库时通过阈值灰度一定程度上可体现被摹仿人的笔迹粗细变化,但在笔顺特征方面会因为录入方式是扫描,类似于一幅“画”,而不是一个“字”,在写字机器人书写时会偶发异常;(3)利用计算机深度学习技术,大量被摹仿人字迹的信息录入,并通过AI学习让计算机掌握被摹仿人书写习惯与书写特征,从而形成与被摹仿人字迹风格高度相仿的笔迹。随着AI技术精进和样本数据的增大,此类笔迹与被摹仿人字迹会愈加趋同,未来将对鉴定工作带来较大考验。
二、实验过程
(一)实验仪器、软件
本实验所用器材:METAL-20型号写字机器人(如图1所示)、电容笔、华为mate40pro、笔记本电脑(Windows7系统)、Pimio签字笔(0.5mm黑色)、放大镜。

本实验所用软件:奎享造字、奎享雕刻软件。
(二)实验设计
根据写字机器人特点,用电容笔在手机奎享造字软件中录入比对样本所需的个人字体,将字库导入奎享雕刻软件,通过奎享雕刻软件中字体变形功能,将字体在合理区间内进行随机化处理以增加写字机器人摹仿个人字迹迷惑性,通过直接比对法和放大观察法对两种字迹进行特征比对,从而发现异同,总结鉴别方式。
(三)实验对象
选取12位在校大学生进行3项实验准备:(1)比对样本制作;(2)个人字体录入;(3)摹仿他人笔迹。
(四)实验步骤
1.比对样本制作
分别让所选取的三名实验对象对一份随机选取的素材在统一纸张、使用同一支笔进行书写。(要求笔墨余量大致相同且较为充盈,确保所完成的样本能够较为完整的表现个人笔迹特征)(如图2所示)。

2.个人字体录入
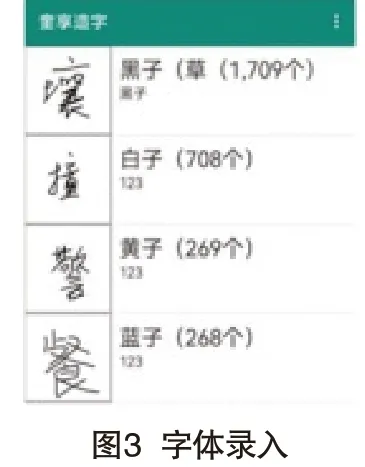
通过手机下载奎享造字软件,使用电容笔在手机屏幕上录入个人字迹。考虑到个人字迹具有随机性、变化性,在个人字迹录入过程中,采取一人字迹多次录入,形成个人多个字体库(如图3所示),为在后续写字机器人摹仿书写过程中,多个字体库随机使用,为确保字迹逼真性,同时在字迹录入时尽量采用连笔方式,确保字迹的完整性(如图4所示)。

3.写字机器人摹仿笔迹
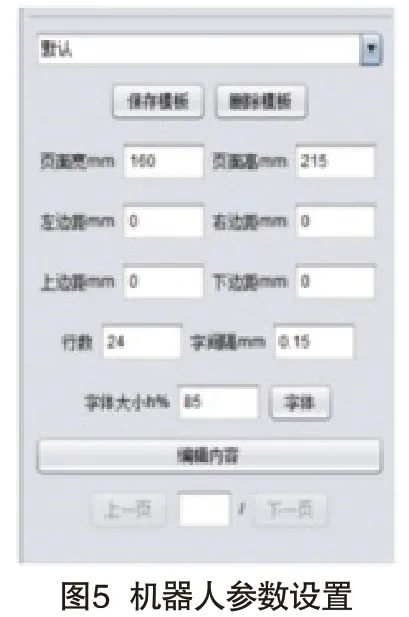
将写字机器人连接电脑,设置写字机器人机体,同纸同笔,确保签字笔笔墨余量相同、笔墨充盈,确保笔尖距离纸张3~4cm处,尽量体现出写字机器人临摹笔迹特征,设置写字机器人参数,测量纸张长度、宽度、行数,保证写字机器人所临摹字迹所在位置合理,具有可比对性(如图5所示)。将一人多个字体库随机选取,再通过字体变形功能将字体在合理范围内进行随机大小、随机间距、随机倾斜、随机垂直拉升以增加写字机器人摹仿个人字迹的迷惑性(如图6所示)。

三、写字机器人摹仿笔迹与个人书写笔迹比较分析
(一)概貌特征、布局特征
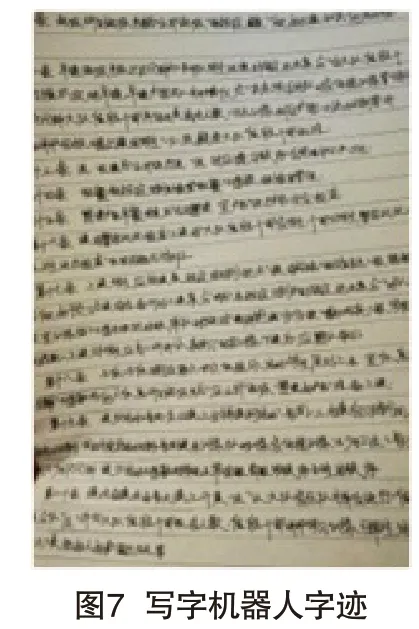
写字机器人摹仿个人字迹进行仿写,书写水平特征无法体现,写字机器人将字体进行了随机化处理,字距、行距皆可微调、对整体文字通篇布局单字结构也都进行了参数调整,基本达到与书写人笔迹较为吻合的状态,因此概貌、布局特征基本相同,尚不作本次研究的重点。但对字行与格线关系特征进行观察,经过多次实验发现,写字机器人通过模板对书写纸张的长宽、行数、字体大小进行编辑,故写字机器人书写在每一行的行距中默认是从中间开始,按照编辑的字体大小占比进行书写,因此写字机器人仿写笔迹大多位于格线中间位置(如图7所示),这一点可对习惯紧靠下格线或其他不靠近中线位置书写的书写人进行特征比对(如图8所示)。
(二)搭配比例特征
写字机器人仿写是通过手动录入、图片录入以及AI学习方式,尽管在搭配比例上较为接近书写人搭配比例,但受限制于录入的字体库的种类数量,对于搭配比例特征较为明显且在笔迹中多次出现的字体,即使通过软件进行随机化处理,最多只能做到单个字体整体性的倾斜、放大缩小等,对于字体内部搭配变化很小,仍能比较容易发现多处比例特征完全相同的同一文字。因此这也可以作为鉴别是否为写字机器人摹仿笔迹的手段之一。
1.相邻笔画的距离特征
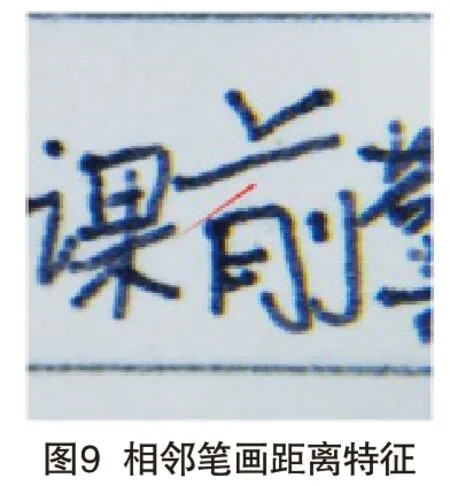
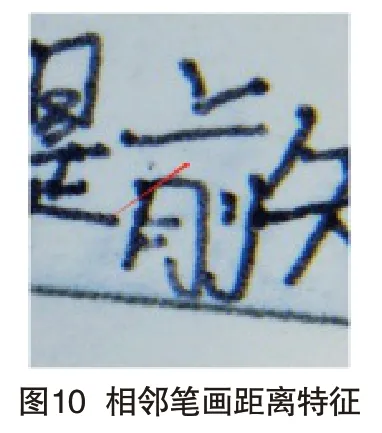
由于写字机器人是机械的摹仿个人书写习惯,因此在较大篇幅的材料中,很容易发现同一个字多次出现的邻位笔画上的相似性,如图9、图10中的“前”字,上下两部分距离较远,且通篇多处可以发现同样特征,尽管测量后发现距离不完全相同,但是经过多处测量、比对、分析后发现,两部分之间距离与软件随机化处理使得字整体缩放比例成正比,从而得出文中的类似“前”字这样的相邻笔画距离特征其实是对字库中字复制粘贴的过程,仅仅有缩放区别,无其他变化。
2.偏旁的搭配特征
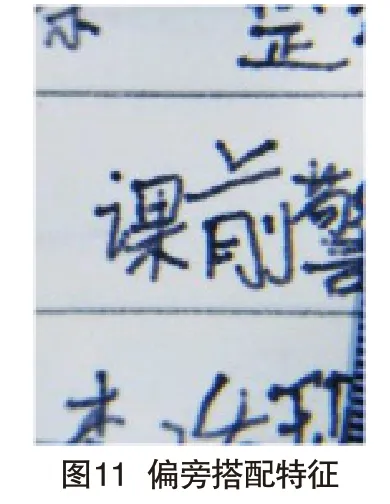
如图11、图12中“课”字书写偏旁偏高,且检材中发现多出言字旁书写均出现偏高特征,反应了被摹仿人书写特征的同时,发现同一字迹偏旁高低、倾斜几乎一模一样,可推断出类似于写字机器人“复制”“粘贴”的过程。

(三)笔顺特征
无论通过手写录入字迹或是图片扫描录入字体,又或是通过AI学习字迹,在录入过程中都未设计记录书写人的书写笔顺,在计算机控制下,为保持笔画连续性,书写笔的移动程序设计都是按由上至下固定顺序,因此某些字,特别是连笔字的书写过程中,会出现写字机器人摹仿字迹和个人字迹笔顺不同。
(四)运笔特征
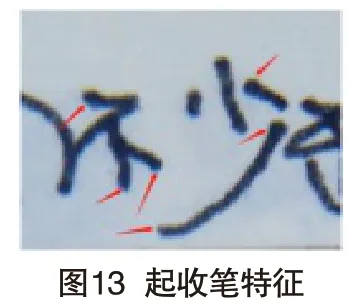
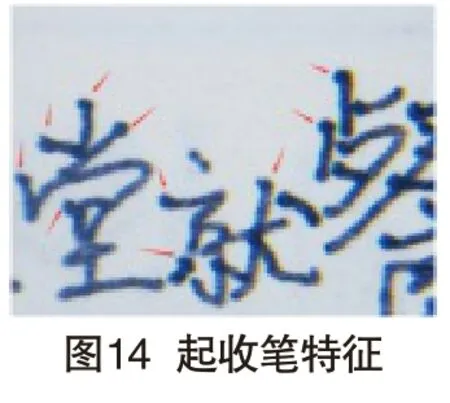
1.起收笔特征
正常人书写动作开始时,笔尖接触书写面一般起笔方式有直起笔、侧起笔和回转起笔。笔尖离开书写面的细节动作特点主要可以分为直收笔、顿压收笔和回转收笔。写字机器人工作原理是通过电机上安装的弹簧直压方式进行起笔收笔,因此写字机器人起笔收笔均为顿压笔,且形态较为生硬,起收笔过重,收笔顿压笔末端不是寻常顿压收笔应有的圆顿形,类似于点状式的停笔(如图13、图14、图15所示)。有时候甚至会出现夸张再现提、转、顿的收笔动作,形成异常的收笔样式。

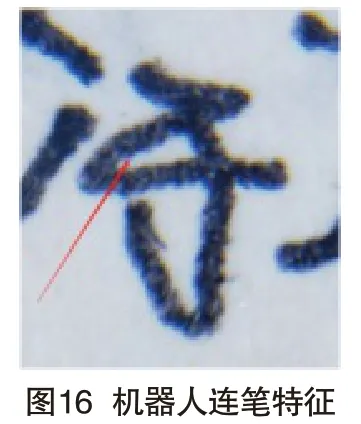
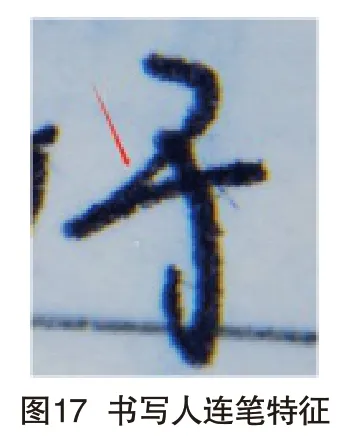
2.连笔特征
不同人在笔画间连笔的部位、连笔方向和连笔形态上,会表现出不同特征。一般来讲,在容易连笔部位出现的连笔价值较低,但写字机器人书写过程中笔力较为均匀,连笔笔画无粗细变化,连笔较为生硬,且连笔方向固定,相同字在全篇多次出现的连笔方向完全一致,因此可作为鉴别是否为写字机器人书写的方法(如图16、图17所示)。
3.笔力特征
笔力特征是一种现行条件下较为切实有效的区别是否为写字机器人摹仿字迹的方式,对于机器而言只有0和1,代表着“白”和“黑”,在字体录入的过程中,受限制于软件、录入设备不具备区别笔力大小的功能,也受制于电机的固定位置,在Z轴上的体现仅仅为放置笔杆的弹簧上,因此,写字机器人在摹仿时仅能判断是否落笔,并不能表现笔力轻重,即写字机器人在摹仿书写过程中笔力全程均较为均匀,笔痕大小,笔画粗细基本一致。在书写时缺少“轻、重、缓、急”的笔迹动态感。
(五)其他特殊笔迹特征
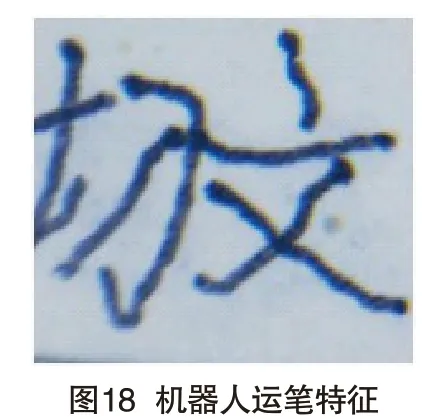
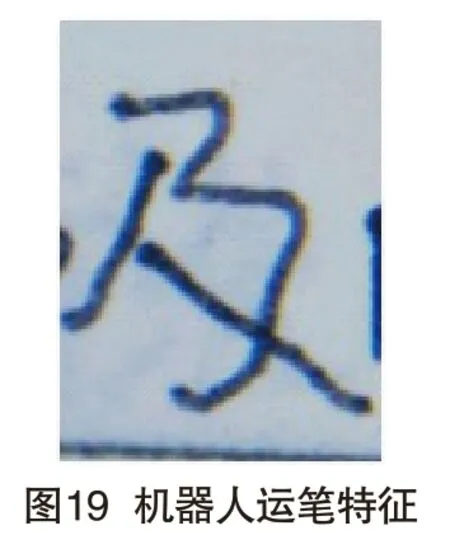
在运用放大镜观察发现,写字机器人摹仿字迹中较多情况会出现笔画抖动(如图18、图19所示),该抖动歪曲特征与普通摹仿笔迹抖动歪曲特征相比,抖动歪曲幅度小,分布广,且这种不规则的小幅度抖动在正常书写过程中无法实现,经过多次实验分析得出,写字机器人摹仿笔迹在个别笔画出现歪曲抖动受影响于设置的书写速度,且降低书写速度可以在通篇有效减少发生抖动频率,另一方面是在录入字体库时受影响于电容笔灵敏度,录入设备辨识度的原因。这种抖动几乎无法避免,因此这一运笔特征可作为鉴别是否为写字机器人摹仿字迹的有效手段之一。
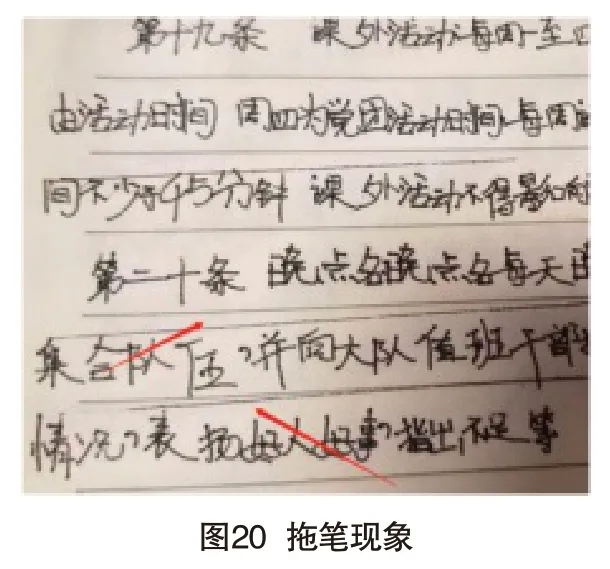
机器人在书写过程中,要依靠结合控制板、步进电机、抬笔舵机、齿轮等硬件的联动才能实现,对于Z轴的距离把控无法做到像X、Y轴一样精准测量,因此如果笔的位置稍低,或纸面、桌面不平整,则会在笔迹书写的收笔位置出现较长的拖带痕迹,从而形成机械所特有的反常拖笔现象(如图20所示)。
(六)标点符号笔迹特征
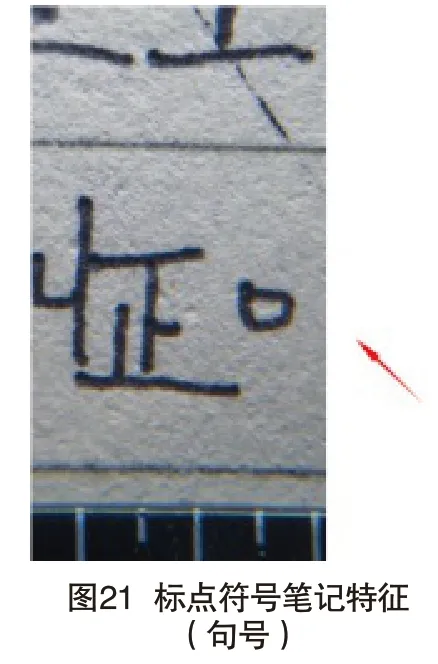
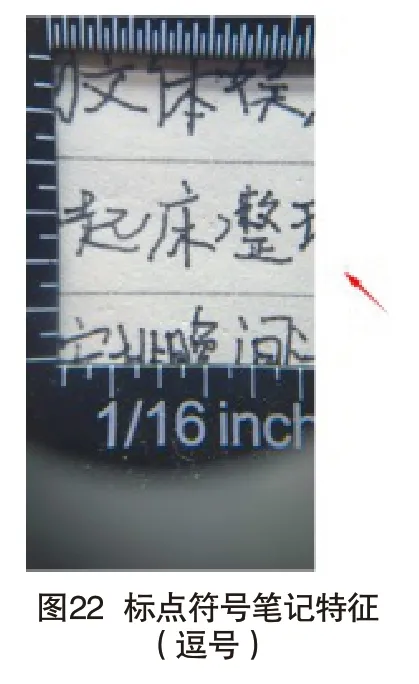
《标点符号用法》明确规定了标点符号的名称、样式和用法,其中逗号、句号放在字下偏右位置,写字机器人书写这类标点符号时,由于书写在每一行的位置固定是从中间开始按照编辑的字体大小占比进行书写,因此书写的逗号、句号都偏中间甚至靠近正中心位置(如图21,22所示),与正常书写人书写有较大突兀,因此可作为鉴别是否为写字机器人书写的特征之一。
(七)执笔特征
正常人在写字过程中,一般的执笔角度都是笔与纸面横线约成35℃至40℃之间,因此采用了“三指执笔法”即大拇指和食指中间的指头在上面抓住笔杆子,笔杆上部也自然而然地斜靠于手指虎口部,借此来保持执笔工作的顺畅,执笔过程中的绕、翻、压腕等动作,也保证了书写过程中可以力度大小转换、虚实结合、运笔灵活,而写字机器人的执笔在角度上多为固定参数,以本实验中使用的“十字形”写字机器人为例,执笔角度无法调整为垂直90°,在整个书写过程中均保持这一书写角度,同时写字机器人是使用塑料笔杆弹片加螺丝钉固定笔进行书写,仅仅有了书写的“实”,没有了书写的“虚”,因此在放大镜观察其笔痕,特征均为笔痕深度均匀,笔痕脊梁与两边痕迹缘的距离不变,痕迹缘处纸张翘起程度一致。
四、结论
通过观察写字机器人摹仿笔迹,发现现有的写字机器人摹仿个人字迹存在较大的可鉴别点,总结如下:
(1)写字机器人布局固定位于两行线中间,且全篇呈机械性重复;
(2)单字笔顺特征基本可以实现与被摹仿字迹完全相同,但是较为复杂的字可能会因为录入原因与被摹仿字迹产生差异;
(3)起收笔均为顿压笔;
(4)执笔角度固定单一;
(5)个别笔画会出现幅度小且弯曲小的抖动;
(6)整体笔画均匀笔压、笔痕粗细接近;
(7)整体运笔生硬,无“轻、重、缓、急”的笔势;
(8)写字机器人书写标点符号位置普遍会出现靠近中心位置的情况。
因此在实战过程当中,如遇到需鉴别是否为写字机器人摹仿字迹可通过如下方式:
(1)可以通过直观比对检验单字组合特征、整体布局特征;
(2)通过放大比对检验字迹的起首笔、行笔等细节特征,在实验中发现,在放大镜侧光照射作用下,通过手机或者相机进一步放大拍摄,可以清晰观察到字迹的笔力特征,甚至可以借此洞悉单字交叉部分的笔顺;
(3)可以利用文检仪或运用反射变换成像技术等进行进一步比对观察。
猜你喜欢
中国篆刻(2022年2期)2022-03-29
少儿科技(2021年3期)2021-01-20
江苏教育(2020年45期)2020-08-06
作文新天地(初中版)(2020年2期)2020-04-10
中国篆刻(2020年2期)2020-03-23
快乐语文(2017年33期)2017-12-06
老年教育(2017年4期)2017-05-10
快乐语文(2016年7期)2016-11-07
中国司法鉴定(2015年4期)2015-02-28