
电子信息装备热效应智能化改进研究与验证
2023-10-25 06:51崔佩璋郭宝锋
火力与指挥控制 2023年8期
陶 杰,崔佩璋,王 欣,郭宝锋
(陆军工程大学石家庄校区,石家庄 050003)
0 引言
随着新一轮军事革命的加速推进,武器装备智能化、体系化、网络化、无人化趋势明显,未来战争形态正从信息化加速向智能化演变[1]。然而智能化电子信息化装备都有一个共同特点:由大规模或超大规模集成电路设计而成,这些超大规模电路都有其特定的环境适应性,即在一定温度范围内才正常运行,否则会发生各类型不可预知的故障,且长时间高温运行会导致装备老化加快,缩短使用寿命。为了确保电子信息装备在战场高温高湿或者低温等恶劣环境条件下能够无故障工作,对其热效应改进以预防装备故障并保持其正常使用寿命,是电子信息装备保障的研究方向之一。
目前,从国内外电子信息装备常用的温控手段来看,大体可以分为两类:一类是针对发热量很大的元器件,如CPU 和GPU 等,运用散热片加装风扇的方式进行个体强制散热;另一类是在装备机箱上安装风扇,以机箱为热传导媒介,强制散去机箱累积热量,以便交换出装备内部多余热能,但是这两类常规方法仅能针对发热较为严重的芯片个体或装备局部区域,且都属于被动散热,亦无法辅助设备在低温环境下启动。从装备整体热效应改进着眼,一方面随着工作时间增加,电能消耗而累积的热量无法快速散出,会因装备整体发热严重导致故障频发甚至寿命缩短;另一方面,超低温下装备不能正常启动概率增加。针对上述两种因热效应引起的装备故障,设计一种温度控制系统对电子信息装备热效应进行改进,可以有效预防电子信息装备因热效应而发生系统故障,提升电子信息装备在战场高温高湿或低温等恶劣环境下的鲁棒性。
1 系统总体设计
针对上述两方面因热效应引起的装备故障问题,以不能随意拆解和改装电子信息装备,不可破坏装备自身正常工作运行状态等为前提条件开展这项技术研究和验证,否则将失去电子信息装备保障的研究意义。因此,根据现实需求,设计了基于BP神经网络增量PID 温度智能控制方案,其具体组成如图1 所示。该方案以STM32F4 单片机为平台,基于BP 神经网络增量PID 控制算法为核心,参数动态整定在计算机中训练完成,得到基于kreas 框架BP 神经网络的.h5 权重文件,然后移植到STM32F4单片机上。

图1 电子信息装备热效应智能改进总体设计Fig.1 General design of intelligent improvement of thermal effects of electronic information equipment
方案中,24 V 电源取自装备车辆上供电设备,再通过本系统电源转换模块为其他功能单元提供5 V和3.3 V 电源;SHT35 温湿度传感器负责获取电子信息装备所处环境温度和湿度参数;DS18B20 温度传感器采集温度控制舱室温度值;2.4 英寸OLED液晶屏显示出温控方案结果、当前系统运行状态及方案执行情况;CMOSFET 驱动电路根据STM32F4单片机输出多路PWM 波控制珀尔贴矩阵输出功率;STM32F4 单片机负责温度控制方案生成和本系统其他外部设备控制等。
系统开始运行后,首先进行硬件设备初始化,并根据SHT35 温湿度传感器读取的外部环境温湿度参数,决定为装备实施升温还是降温控制策略。温控时,由4 个DS18B20 温度传感器采集温控舱室温度,其均值表征温控舱室的最终目标温度。若进行升温控制,则直接启动珀尔贴进行加热,直至温控舱温度升至10℃(经验值)。若进行降温控制,根据温湿度传感器获取的环境温湿度数据,计算该环境下的温控目标温度(经过多次试验验证,将系统控制的目标温度设定为比露点温度高3℃的经验值最为合理),而后不断读取温控舱室的温度,将该温度和设定温度进行差值,并记录最近3 次的温度控制误差值,运用BP 神经网络训练出的权重参数和增量PID 控制算法,可将温度控制在目标温度±0.2℃范围内。系统通过BP 神经网络增量PID 温度控制闭环,实现了对电子信息装备温度精准智能控制,预防了装备因高低温发生故障,保障了装备正常使用寿命。
2 研究内容
2.1 热效应改进安全性
采用珀尔帖进行制冷或者制热需要考虑其所处环境温度、湿度参数,在自然环境温度和湿度条件下盲目降温会使珀尔帖表面产生凝水、结露甚至结冰,这就给温度控电路甚至是电子信息装备带来巨大的安全隐患。基于热效应改进方案的安全性考虑,在温控电路实施温控之前首先要获取当前所处环境的露点温度。因此,可使用温湿度传感器采集环境温度和湿度参数,并将测得的环境温度和湿度具体数值带入式(1)中,即可得到该温度和湿度下的露点温度[2-4]:
td=U(A+B·t)+C·t-19.2 (1)
其中,td为露点温度(℃),U 为环境相对湿度(%),A=0.198,B=0.001 7,C=0.84,t 为环境温度。利用式(1)可以得到与实际露点温度最大相差0.5℃的露点温度计算值,相较于查表法的过程繁琐及数量值离散等局限性,公式法计算方便,常被广泛采用,该公式拟合的露点温度与真实露点温度比较如图2 所示。
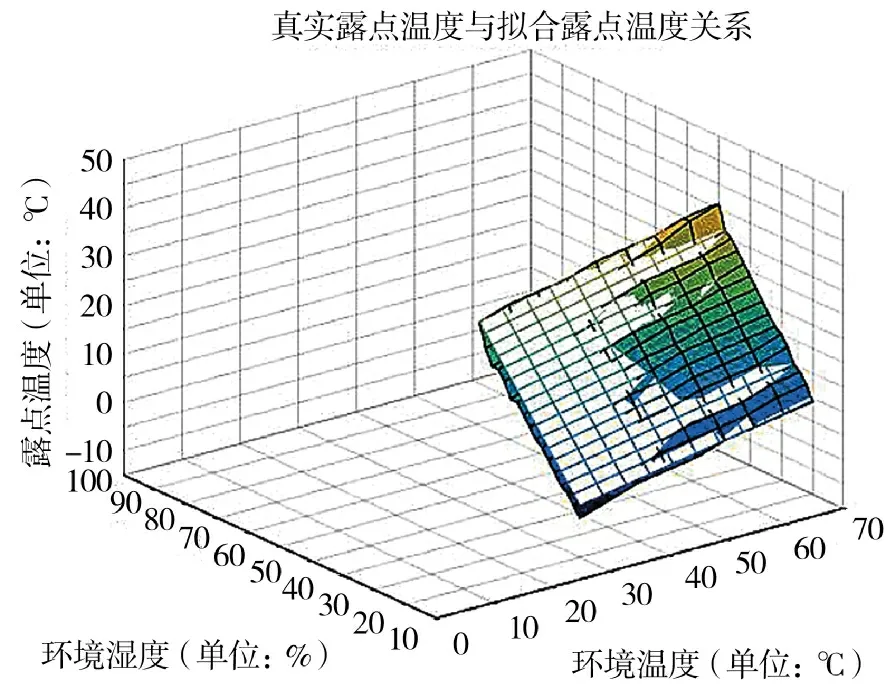
图2 露点真实温度和拟合温度之间的对比图Fig.2 Comparison chart of actual temperature and fitting temperature of dew points
2.2 大功率热效应元器件驱动
珀尔帖是一类大功率热效应电子元器件,调整电流方向即可实现制冷与制热翻转,且由于温度需要精准控制,从而需要精准控制流过珀尔帖的电流,与使用可控硅、继电器等驱动方案相比[5-6],并结合电子信息装备小而精的特点,采用了PWM 波精准开关场效应管控制流过珀尔帖电流的方法实现。珀尔帖驱动电路的其中一路具体设计如图3 所示。

图3 珀尔帖驱动电路Fig.3 Peltier drive circuit
图3 中,驱动电路采用24 V 供电,NPN 型三极管Q17 采用S9014,增强型N 沟道场效应管Q15 采用IRFB3607,P18 为珀尔帖接口,PB5 是STM32F4单片机输出某个占空比PWM 波经过非门后的信号端口。当PB5 为低电平时,Q17 导通而Q15 截止,珀尔帖无功率输出;当PB5 为高电平,Q17 截止而Q15 导通,接在P18 两端的珀尔帖开始工作。通过以上分析可知,当PB15 输出的PWM 波形占空比为50%时,珀尔帖输出功率约为正常功率的一半,且占空比越大珀尔帖输出功率越大。由单片机通过定时器产生的PWM 波形,实测其占空比与流过珀尔帖的电流、珀尔帖两端电压、珀尔帖功率及IRF3607栅源极电压关系如图4 所示。
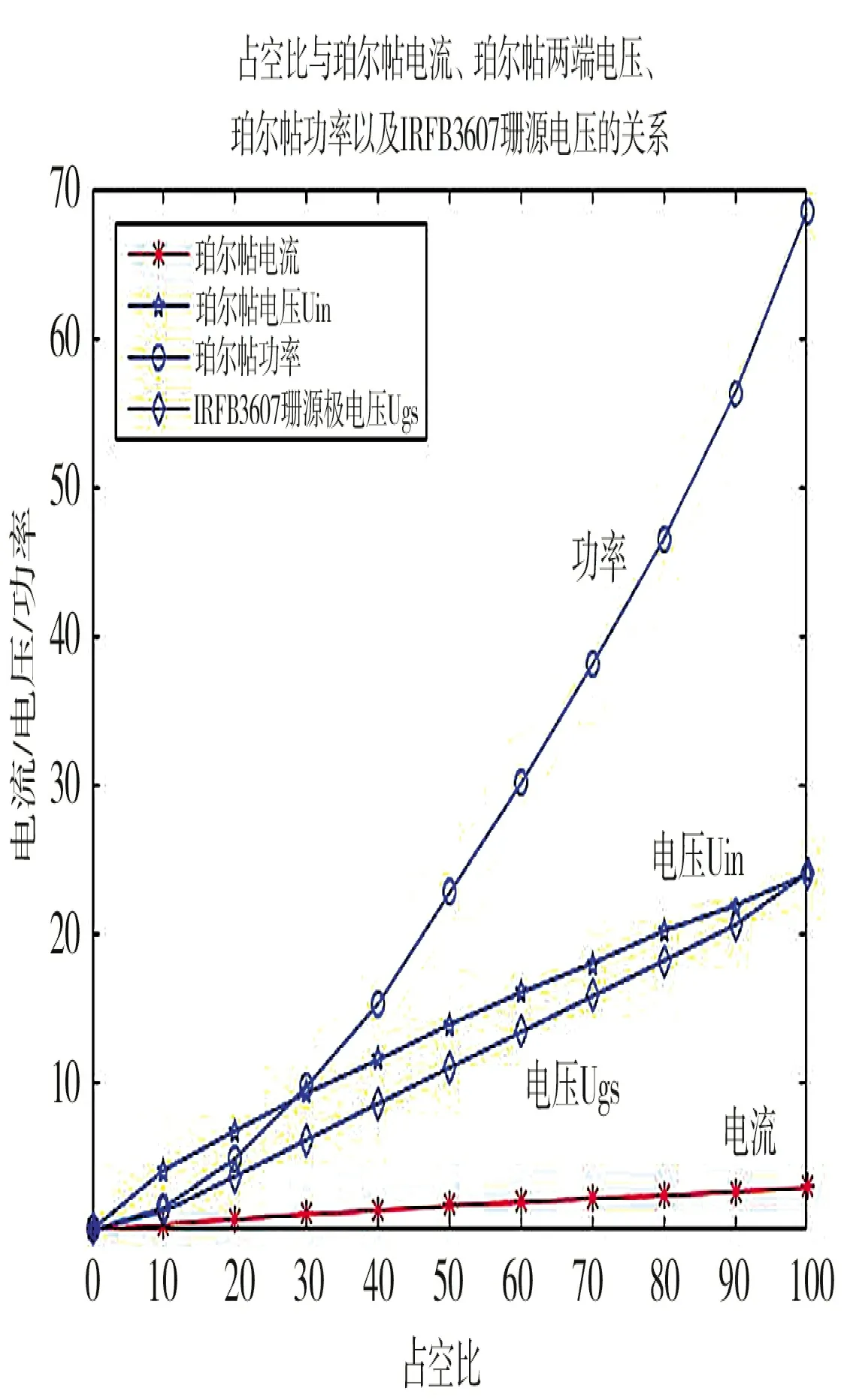
图4 PWM 波占空比与珀尔帖的端电流、端电压、消耗功率以及IRFB3607 栅源电压的关系曲线图Fig.4 Relation curve of PWM wave duty cycle、terminal current、terminal voltage、consumption power of Peltier and grid source voltage of IRF 3607
2.3 基于BP 神经网络增量PID 的温度智能控制
结合电子信息装备热效应特点,比较模糊PID控制技术和增量PID 控制技术[7-8],BP 神经网络增量PID 控制技术其优点在于,采用温度控制增量作为BP 神经网络输入更符合系统温度控制实际,对于这种非线性大滞后特征温度控制系统的PID 参数整定可由BP 神经网络输入数据训练逼近,适应性较强,控制效果良好[9-10]。基于BP 神经网络的增量PID 温度控制算法是本系统的控制核心,其构成如下页图5 所示。

图5 基于BP 神经网络增量PID 温度智能控制的系统结构框图Fig.5 System structure framework of intelligent control of pin temperature based on BP neural network incremental
由于需要将BP 神经网络移植到STM32F4 单片机中,神经网络过于复杂,消耗资源过多,单片机无法承受,也不符合小而精的原则;神经网络太简单则不能满足温度控制过程中对kp、ki和kd3 个重要参数的要求,从而无法达到有效温控目的。按照隐层神经元个数确定方法并结合实际调试[11-13],选择输入层神经元个数为4,隐层神经元个数为5,输出层神经元个数为3,其结构示意图如图6 所示。
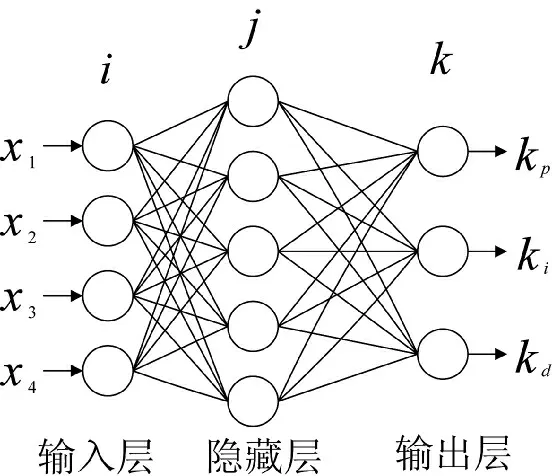
图6 BP 神经网络结构图Fig.6 Structure of BP neural network
图6BP 神经网络结构中,设本次温度控制误差为e(k),则网络输入层x1~x4的值分别为e(k)、e(k)-e(k-1)、e(k)-2e(k-1)+e(k-2)和偏置常量1;kp、ki、kd为BP 神经网络输出的PID3 参数。网络输入层与隐藏层输入间的权值为:
网络隐藏层与输出层间的权值为:
在keras 框架下搭建该神经网络,使用分辨率为0.1℃的e(k)、e(k)-e(k-1)、e(k)-2e(k-1)+e(k-2)预期数值随机组合作为数据集进行训练与验证,得到权重参数矩阵,实现了非线性大滞后系统的PID 参数动态整定。以权重参数矩阵、0.55 学习率、0.01 惯性系数和50 s 采样时间等参数进行仿真,其具体结果如图7 和下页图8 所示。

图7 BP 神经网络在预设参数下仿真输出的kp、ki、kd 与时间关系图Fig.7 The relationship chart among kp、ki、kd with time under the preset parameters of BP neural network

图8 按照设计参数仿真BP 神经网络增量PID 温度智能控制过程图Fig.8 Control process chart of PID intelligent temperature control according to the simulation BP neural network incremental with design parameters
2.4 系统与装备集成结合方式
电子信息装备外形各异,针对其中典型装备的热效应特点,进行了详细设计并研究了防凝水系统与电子信息装备的结合方法。由于珀尔帖在进行温度交换时,两端面温差较大,在低温部分出现较低温度,故对电子信息装备不同结构的箱体采用了两种不同的设计理念,其示意图分别如下页图9 和图10所示。两图中“1”是帮助散热片快速散热的风扇,“2”是珀尔帖制冷片,“3”是处于珀尔帖制冷片和散热风扇之间的散热器。这两种结合方式中,第1 种是直接结合方式,适合电子信息装备表面平整,可以将珀尔帖制冷片直接贴合在表面上,制冷或制热效果明显;第2 种是间接接触方式,适合电子信息装备表面凸凹不平,通过珀尔帖制冷或加热封闭舱室内的空气,以热交换方式间接给电子信息装备箱体降温或升温,这种温度控制方法较第1 种缓慢。

图9 珀尔帖与装备结合方式1 结构示意图Fig.9 Structure schematic diagram of integration mode 1 of peltier with equipmentcombination method 1

图10 珀尔帖与装备结合方式2 结构示意图Fig.10 Structure schematic diagram of integration mode 2 of peltier with equipment
3 实验验证
按照系统总体设计,将验证试验取得的数据进行了可视化处理,分别如图11 和图12 所示。两图分别显示了针对某型电子信息装备实施降温和升温控制时温度控制曲线,降温时取样时间间隔为3 min,升温时为2 min。图11 中,约需要30 min 能将机箱温度降至45℃的目标值,从开始至约第12 min 和约第18 min 至约第33 min 两阶段降温较缓慢,这是因为装备在第1 阶段积累了一部分热量难以快速交换掉,第2 阶段控制温度接近目标温度,受系统控制放缓;图12 中,机箱温度为-20.1℃时开始实施升温,需要约28 min 可以达到目标温度。图13 显示装备在15℃的环境温度下正常工作时,内部温度(15℃~61℃)和装备机箱外部温度的对应关系。

图11 对某型电子信息装备实施降温时温度控制曲线图Fig.11 Temperature control curve during cooling control of a certain electronic information equipment
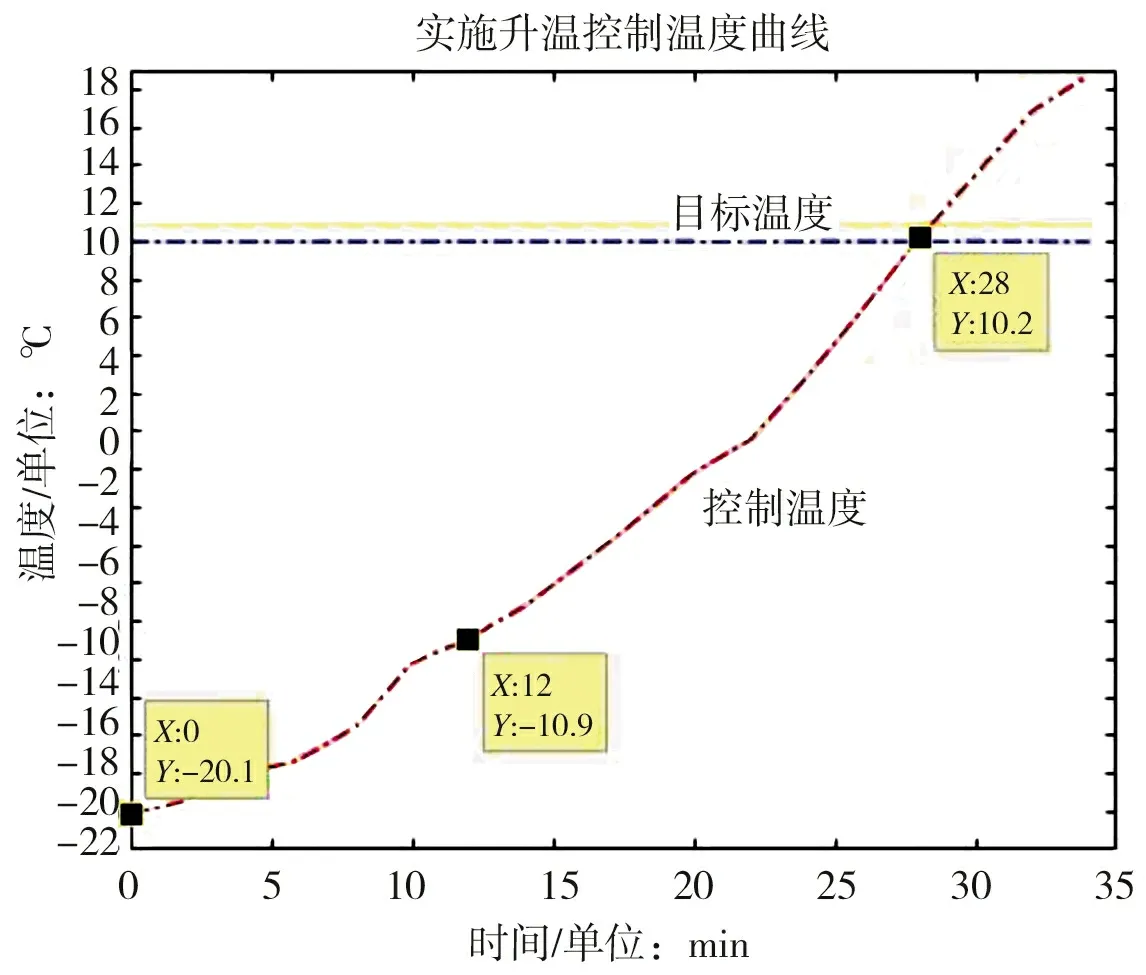
图12 对某型电子信息装备实施升温控制时温度上升曲线Fig.12 Temperature rising curve during temperature rising control of a certain electronic information
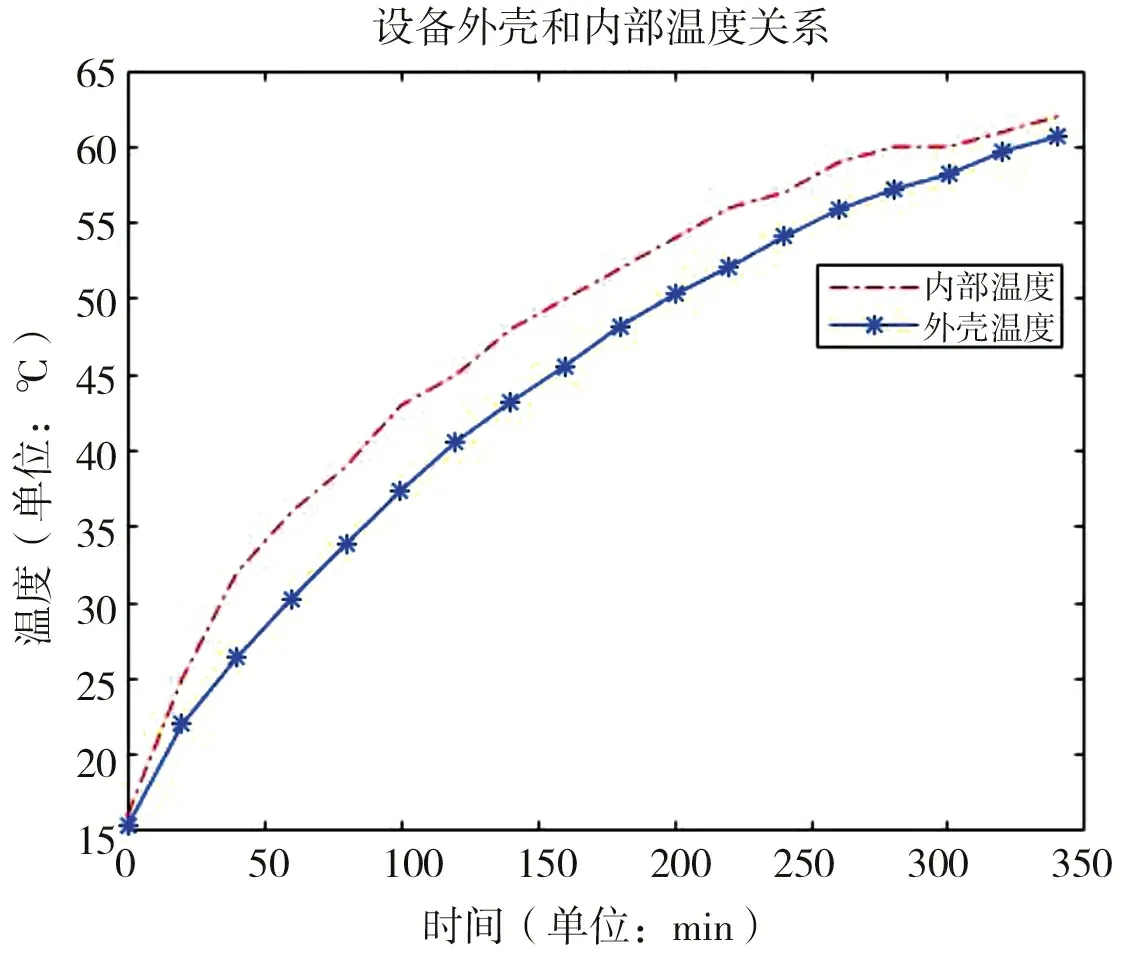
图13 某型电子信息装备机箱外部温度和内部温度对应关系Fig.13 The corresponding relationship between external temperature and internal temperature of a certain electronic information equipment case
从图11 和图8 进行对比可知,相较仿真图的平滑曲线,实际温控曲线说明了:一方面,热效应改造是在电子信息装备正常运行时进行的,温控滞后性大,且电子信息装备工作负荷越大,热效应累积的热增量越快,温控滞后效应越明显;另一方面,图中实际温控曲线非平滑性受到时间离散采样方式和温度传感器精度两方面的影响。
4 结论
针对某型电子信息装备热效应的改造实验,是在不破坏电子信息装备整机及其正常工作状态情况下进行的,实验通过样机运用BP 神经网络增量PID 温度智能控制等关键技术,在整机热效应改造方面作了降温和升温试验,降温时取得了温度控制误差±0.2℃的实验结果,证明了热效应改进方案的可行性。这种利用大功率热交换电子元器件对电子信息装备热效应进行改造的方法,为装备保障提供了思路,同时该系统方案研究与验证为后续装备研制提供了理论支持和实验经验。为了能更加贴近电子信息装备智能化与实战化,进一步提高电子信息装备可靠性,下一步将对提高热转化效率、缩短温度控制时间和降低控制功耗等方面继续深入研究。
猜你喜欢
广东第二课堂·小学(2021年10期)2021-12-03
中国测试(2021年4期)2021-07-16
中学生数理化(高中版.高二数学)(2020年2期)2020-04-21
读者欣赏(2019年5期)2019-05-13
少年文艺·我爱写作文(2017年11期)2017-11-16
材料科学与工程学报(2016年5期)2016-02-27
新闻传播(2015年10期)2015-07-18
小火炬·智漫悦读(2015年5期)2015-06-05
机械制造文摘(焊接分册)(2013年6期)2013-03-20
化学教与学(2012年9期)2012-03-20
