
一种谐振式压电爬行机器人的设计与实验1)
2023-10-29 10:15何世界吴医博周生喜
力学学报 2023年9期
何世界 吴医博 周生喜,2)
* (西北工业大学航空学院,西安 710072)
† (洛阳船舶材料研究所,河南洛阳 471023)
引言
近些年来,机器人技术在国内越来越受到重视,同时也在各领域的生产实践中得到发展与应用.爬行机器人[1]作为机器人中的一种,将代替人类执行侦察、探测、工程作业及显微操作等多项任务,它们的高精确性、高效率、高耐久度证明机器人可以更好地完成人类的工作任务.微小型机器人在如今高科技信息时代扮演着至关重要的角色,是近些年来智能机器人技术发展研究的重点方向,基于其体积较小、灵敏度高、抗干扰强、运动灵活等优点,可以应用于灾后救援搜索、极端环境探测和医疗手术等诸多领域.其中,在管道、峭壁、沙漠以及医疗过程中一些人体部位等人类不易工作的地点,微小型爬行机器人能够代替人类完成高精度任务,进而可有效降低人工作业的危险性并提高工作效率.
由于微小型爬行机器人的基体较小,承载能力较低,当我们需要将机器人体积缩小到cm 或mm级别时,传统的机器人结构模型与驱动方式将无法适用,这就要求爬行机器人利用较小的驱动腿结构来产生较大的驱动力.与此同时,电池与传感器的重量也必须轻量化,这些问题对机器人的微小型化来说都是巨大的挑战.
哈佛大学的微型机器人实验室(Microrobotics Laboratory)研制了一种微型多节爬行机器人[2],该机器人重量为2.4 g,采用PZT-5H 压电陶瓷作为驱动器,在200 V 电压的驱动下能达到0.5 Hz 的腿部摆动频率.斯坦福大学的工程师们设计出了一款叫做MicroTugs 的微型爬行机器人[3-4],该机器人仅重12 g,在平面上的投影与一枚硬币相当.爬行机器人的腿上安装有受到外界压力时会自动弯曲的橡胶钉,增加了其与接触面之间的相对面积从而加强了机器人腿部与接触面之间的黏附性.2010 年,美国哈佛大学的Baisch 等[5]研制了一种仿蟑螂运动的微小型六足机器人HAMR,每条支腿可实现两个自由度的运动输出,并通过挠性接头与基体相连.2011年,美国哈佛大学的Baisch 等[6]研制了新一代仿蟑螂运动的微小型六足机器人 HAMR-3,配备了专用的小型电源,实现了无源运动.2014 年,Baisch 等[7]在前期工作的基础上设计制造出了一种可组装的微型四足机器人HAMR-VP,与HAMR 相比,前者降低了制造复杂性且同时实现了准静态和动态操作.
在微小型机器人研究中,利用智能材料进行机器人的驱动可以使运动结构更加简单,制造更加便捷.其中,利用压电陶瓷逆压电效应[8]的新型驱动方式具有占用体积小、传动效率高、响应速度快且不易受干扰等诸多优点,对提高机器人的可操控性、运动分辨力和响应速度等十分有利,在极端环境的探测和物品运输等领域有着潜在的应用前景.由于以上各种优势,压电陶瓷材料驱动为微小型爬行机器人的未来发展提供了新方向,因此,对于复杂环境下的作业,利用逆压电效应和摩擦驱动以及黏滑运动原理设计出的各种新型结构的压电爬行机器人具有非常广的研究前景和实用价值.
2014 年,Takato 等[9]提出了一种压电冲击式旋转驱动器,致动器由多层压电元件组成,该毫米大小的机器人有6 条腿,可以像昆虫一样在不平整的表面行走,每侧3 支腿通过连接机构连接.2016 年,Rios 等[10-11]设计了一款压电驱动多足式机器人,利用机器人足部在不同驱动电压下的不同模态实现机器人的运动.2016 年,Graule 等[12]利用压电驱动器驱动仿蜻蜓机器人的翅膀,设计并制造了一个扑翼型机器人.2017 年,Hariri 等[13]设计了一款驻波驱动的腿式压电微型机器人并建立了其运动学模型,设计的机器人利用压电梁的不同模态进行运动.2017 年,Rios 等[14]提出并设计了一种每条驱动腿的运动由两个压电双晶梁来控制的微小型六足机器人MinRAR V1,当受到350 Hz 频率的信号激励时可实现约为520 mm/s 的最大运动速度.2018 年,Rios 等[10]研制出了新一代的微小型六足机器人MinRAR V2,与之前相比,该机器人装配了驱动电源与微型控制系统,可以实现两种驱动模式的运动,即利用外部电源激励运动和用自身的电源激励运动.
在国内,蒋振宇等[15-16]研制了一种基于双压电膜驱动的微小型足式机器人,该机器人每条腿都是先在平面弹性板上加工出平面结构再弯折而成,结构简单.2015 年,李魁等[17]设计了一种有3 条不同固有频率的圆弧曲梁足的微小型三足机器人,通过施加每个曲梁足所对应固有频率的激励信号,可以使机器人沿3 个方向运动.2017 年,郑龙龙等[18-19]设计了一种由压电双晶片驱动的微小型八足机器人,其4 条内腿和4 条外腿足端与地面均有大小相同的一个倾斜角,且每一条腿只有一个自由度.2018 年,陈畅等[20-21]设计并研制了一种六足爬行机器人,利用多层材料叠合的压电驱动器驱动,机身结构由3 个驱动单元节组成并利用碳纤维连杆传动机构放大位移并传动.2019 年,李一帆等[22]和李京等[23]研究了一种轮腿式的足腿一体化六足压电机器人,每条腿利用4 个压电陶瓷片谐振驱动,并且在实验中该机器人可以在不同粗糙度的表面行走,展现出了较强的环境适应性.2019 年,Peng 等[24]设计了一种微小型双足压电机器人Milli-Walker,主要由一片压电陶瓷和一个双足基体组成,体长仅为6 mm,当施加的激励信号达到机器人共振频率时,可以实现较快的运动速度.2020 年,卢鹏辉[25]设计了一种小型防倾翻结构的压电机器人,该结构在倾翻后仍可以各个姿态运动,并利用LabVIEW 软件构建了控制系统,能使机器人按既定路径运动.2021 年,高煜斐等[8]设计并制作了一种微型结构的三足压电爬行机器人,通过驱动腿的谐振原理来使其行走,利用左右两侧不同的驱动电压使机器人实现了较快的左转和右转运动,并实现了设计的3 个方向的运动,该结构可为未来微型压电机器人的设计与研究提供参考.为了提高压电机器人的移动灵活性,人们对提高机器人的移动速度和运动分辨力产生了很大兴趣.2023年,Li 等[26]在前期研究的基础上研制了一种小型四足压电机器人,该结构模拟动物运动时的姿态产生形变,可以分别实现纳米分辨率和高速移动两种运动状态,并可实现上述两种运动机制的有效配合.2023 年,Deng 等[27]提出了一种小型谐振蠕动压电机器人,该结构具有沿圆周均匀设置的6 个驱动脚,通过两种振动模式的叠加使驱动脚产生椭圆运动,该机器人最大速度可达200 mm/s,位移分辨力为0.71 μm.同年,Chen 等[28]研究了一种可快速移动和翻转的软压电机器人,长10 mm,体重仅0.058 g.受猎豹四肢在奔驰过程中收缩和扩张的运动步态的启发,利用双螺旋的共振用于放大运动性能,该软体机器人可在复杂地形上移动、爬坡,并承受重负载以及温度传感器.
目前关于小型压电机器人的实验研究在现有的依靠逆压电效应的执行机构驱动位移较小以及不能控制其进行复杂环境下移动与作业等方面尚存在不足,因此本文在上述研究的基础上,设计了一种结构简单、响应快速的四足爬行机器人.基于欧拉-伯努利梁理论计算了其驱动腿部的固有频率,并推导了机器人基体结构的力学模型,设计并制作了压电机器人实物,通过实验测试分析了不同驱动频率、不同负载、不同电压、不同驱动足以及不同接触面对运动方向及运动速度的影响.与此同时,本文还设计了一种机器人的控制程序,可以使其执行期望的运动,以期为后续进一步优化机器人结构以用于人类无法进入的环境或者探险救灾等提供参考数据.
1 机器人结构设计与驱动原理
1.1 机器人的模型设计
在对称结构中,要想实现运动必须实现不对称的驱动力,借鉴于不同变化角度的倾斜面与地面接触时的前后摩擦系数不同,设想出了如图1 所示的3 种驱动足,分别为圆弧体、圆弧面(铲式)和倾斜面驱动足,驱动力实现方式主要为利用不对称的形状和表面倾斜结构形成不对称摩擦力[29].选择在材料表面加工倾斜的微结构实现各向异性的摩擦力,该驱动足采用PLA 材料使用30%填充度打印而成,且该结构中间为镂空结构,实现轻量化.压电片采用PZT-5H 压电陶瓷,经极化处理后再与黄铜片粘在一起.

图1 驱动足的结构Fig.1 The structure of the driving foot
本文设计了一种基于逆压电效应的足腿一体化摩擦驱动结构,实验中选用的压电片参数如表1 所示,机器人基体为轴对称结构,中间基板为半径18 mm 的圆形铍铜板,中间右侧第2 段铍铜基板长为5 mm,宽为12 mm,连接在圆形基底右侧,与腿部梁成135°夹角,第3 段铍铜基板长为45 mm,宽为12 mm,且与足部连接板成135°夹角,第4 段铍铜基板长为20 mm,宽为20 mm,用来连接驱动足,厚度均为0.2 mm.

表1 材料参数Table 1 Material parameters
其中该机器人总质量为10.8 g,摩擦力驱动足通过双面胶粘贴在足部连接板下端,借鉴已有的菱形、杠杆等位移放大机械装置,将机器人结构设计成近似梯形形状使其顶部振动幅值得到放大.将该结构看做一个两足的运动单元节以方便后续利用其来进行多足机器人的制作.设计的两足机器人实物模型参数如表2 所示,机器人基体展开俯视图如图2 所示,中间圆形基底为粘贴压电片的部分.

表2 机器人一个单元节的参数Table 2 Parameters of a robot unit

图2 机器人基体展开图及尺寸 (单位: mm)Fig.2 Unfolded drawing and dimensions of the robot substrate (unit: mm)
1.2 压电机器人驱动原理
在Comsol 中施加与两足机器人结构谐振频率一致的电压信号到压电片后,它对基体产生压电力,同时带动基体产生相应的应力应变,机器人的形变如图3 所示.

图3 机器人在谐振频率下的变形Fig.3 Deformation of the robot at a resonant frequency
首先,分析机器人单侧足腿的受力变形,在Comsol中设置压电陶瓷片受到第一阶振动模态的激励频率,对模型施加正弦波电压激励载荷,并对其一个周期内进行瞬态求解可得出机器人在一个运动周期内的形态变化.如图4 所示,状态(1)为模型上表面由平衡位置向上弯曲的状态,到正弦波峰值时机器人上表面达到最大弯曲状态,状态(2)为弯曲达到最高点并即将向下弯曲的变形状态,状态(3)为机器人由平衡位置开始向下弯曲达到最低点,状态(4)为模型运动到最低点并开始向上运动,最终再次回到平衡位置;在这个周期的瞬态解中可以发现机器人两端的足部存在两种运动状态: 当模型上基底向上弯曲时,机器人两足端相互靠近;当模型上基底向下弯曲时,机器人两足端相互远离.

图4 结构在正弦波激励下的变形Fig.4 Structural deformation under sinusoidal wave excitation
本文设计了一种基于逆压电效应的足腿一体化摩擦驱动结构,当确定压电片的极化方向后,在d31工作模式下(施加电压方向与压电片形变方向相垂直)的压电陶瓷片在周期性电压的驱动下会产生周期性弯曲,与之连接的弹性腿也将产生对应的弯曲振动.当驱动压电片的激励频率达到机器人基体的共振频率时,它的振动幅值会显著增大,弹性腿连接的摩擦力驱动足与工作表面发生摩擦,将产生左右两侧不对称的摩擦力来驱动结构行走[30].当施加连续正弦激励和脉冲正弦激励信号时,压电机器人可分别实现较快速度和较高分辨力的运动.基于以上原理设计出的机器人具有体积较小、传动效率高、响应速度快的优点.
在机器人两端足部设置不对称的结构,可以引入左右方向不等的摩擦力,它可以在不对称摩擦力的驱动下向摩擦力较小的一侧运动.将压电片粘贴在两足机器人单元体的圆形基底上,经分析可得到具体的运动过程如图5 所示: 状态(a)机器人的平衡位置,状态(b) 为圆形基底处于最高点位置,状态(c)为压电片弯曲到最低点位置.当压电片由最高点向最低点运动时,机器人两端腿部相互远离,此时机器人右端足部受到正方向的大值摩擦力作用,左端受到负方向的小值摩擦力作用,受到的合力为正向力,驱使机器人向正方向运动;当压电片由最低点向最高点运动时,机器人两端腿部相互靠近,此时机器人右端足部受到负方向的小值摩擦力作用,左端受到正方向的大值摩擦力作用,受到的合力驱动机器人继续向正向运动.

图5 移动机理Fig.5 The movement mechanism
2 受力分析及动力学建模
2.1 驱动腿的共振频率分析
如图6 所示,利用材料力学知识[31]对驱动腿进行理论分析,设横向振动位移为w,轴向位移为u,则压电作动器的应力应变关系为

图6 驱动腿的简化模型Fig.6 Simplified model of the driving leg
式中,z为纵坐标,S为梁上的应变.
将圆形压电片和铍铜基底简化为一个质量点,下文将具体分析压电片产生的激励.将与其连接的机器人压电腿部和足部连接板简化为欧拉-伯努利梁[32],并对每段结构进行分析,w1,w2,w3分别代表3 段结构的横向位移,仅考虑弯曲振动和轴向振动,当x∈(0,l1) 时
当x∈(0,l2) 时
当x∈(0,l3) 时
式中,mk为各分段单位长度的质量,g/mm;Ek为各分段等效杨氏模量,GPa;Ik为各分段的惯性矩,m4;ck为黏性阻尼系数.
式中,Wn为每段的宽度,m;tc为铍铜梁厚度,m;ρc为梁体积密度,g/mm3.
忽略黏性阻尼系数c时,设梁的横向振动方程[33]的解为
将式(14)带入式(2)中,可得
进一步整理可得
该方程左端为x的函数,右端为t的函数,且x与t相互独立,因此上式应该等于一个常数,且该常数非负,记为ω2≥ 0,因此上式可以分离为两个独立的微分方程
由于各个分段的宽度和厚度也不同,因此弯曲梁的模态方程由3 个不同的部分组成.各段的横向坐标分别表示为x1,x2和x3.
当x1=0 时,边界条件为
当xn=ln,xn+1=0,n=1,2 时,连续性边界条件为
当x3=l3时,边界条件为
弯曲梁的横向振型函数为
设纵向振动方程的解为
其中,An,Bn,Cn,Dn,En,Fn,Gn均为系数
由式(14)~式(34)可以得出压电驱动腿各阶的固有频率fn,驱动腿每段结构简化模型具有一致的共振频率,可求得f1=242.52 Hz,f2=542.04 Hz.
在Comsol 中建立机器人对称单元节一半的结构模型,中间半圆板横截面处施加滚动铰支座约束,有限元仿真分析的结果中可得到低阶固有频率为249.67 Hz,可以看到数值解和仿真结果相差并不大,说明分析结果较为准确.
2.2 圆形压电片的等效激励
本文所选用的压电片结构如图7 所示,下端为黄铜金属层,厚度为t1;上端为PZT-5H 压电陶瓷材料,厚度为t2;上层的压电陶瓷焊接有导线接正极,下层的金属接负极;以下端金属层的中心位置为坐标原点建立柱坐标系,压电陶瓷与金属层为同圆心的层合圆板结构,压电板的半径为a,令z轴垂直平面向上,径向坐标r与环向坐标θ服从右手定则.将压电层的激励等效为关节处的弯矩M(t),当在压电层上下两端之间施加电压时,由于d31效应压电片一端伸长另一端缩短,将产生弯曲变形,设金属层在ro-z平面内的转角为φ(r,t),当r=a时将其表示为φ(t).设粘贴有压电片的黄铜板的弯曲刚度为K2,以产生等量转角为原则有M(t)=K2φ(t).

图7 压电片的柱坐标系Fig.7 The cylindrical coordinate system of piezoelectric patch
由以上基本假设可得径向应变、环向应变与径向坐标、转角之间的关系如下[34]
式中,εr为径向应变,εθ为环向应变,r为径向坐标,φ为绕中心面的转角.
采用第3 类g 型压电方程
其中,σr为径向应力,σθ为环向应力,Ez为z方向电场强度,D为电位移向量,g为压电电压常数矩阵,β为应力不变条件下介质隔离率矩阵,sD为恒电流密度条件下的柔性常数矩阵.
本文选用的压电材料为PZT-5H,其压电介电常数矩阵、柔度系数矩阵、电位移向量以及压电电压常数矩阵参照标定标准(z方向极化).其g 型压电方程中的材料参数sD,g,β分别为
将式(37)代入式(38),解得上压电层的本构方程[35]如下
压电层中r-o-z平面内的力矩为
将式(39)代入式(40)得
由圆形薄板的轴对称弯曲理论[35],可知黄铜金属板中r-o-z平面内的力矩为
其中,M为压电层中的力矩;Mm为金属层中的弯矩;Em为黄铜的弹性模量;υ 为黄铜的泊松比.
将Ez在z方向积分有
其中,V为压电层的上表面电压值.
将式(39)代入式(43)可得
由力矩平衡关系得
将上式代入可得
2.3 对机器人右侧腿的受力分析
将计算得到的压电层合板的激励等效为关节处的弯矩M(t),如图8 所示.ki为柔性足的等效关节刚度,zi为柔性足每段梁的等效质量,φi为关节转角,li为梁的长度,i=1,2,3.自由状态下l1呈水平状态,l2与y轴方向的夹角为θ2.取x轴与地面平行,y轴正方向向上,建立直角坐标系o-xy.在o-xy中,每个节点处的位置为(ai,bi),i=1,2,3,4,初始时刻a1与x轴上的o点重合,b4与y轴上的0 点重合.根据几何关系,可得ai,bi与φi之间的关系如下

图8 一侧腿部的受力分析Fig.8 Force analysis of one leg
式中,θ2为初始状态第2 段关节与y轴方向的夹角;θ3为弯曲后第3 段关节与x轴的夹角.
根据上图的结构模型,可得系统的动力学方程式(59)~式(64)
计算与地面未接触时驱动足受激励时y方向上的位移变化
当V=80sin(2πft) 时,y方向上的振幅为
压电片与圆板弯曲时,横向位移为 Δa,随时间变化的驱动足连接板末端x轴上的位置为
未弯曲变形时,驱动足连接板末端x轴上的位置a4=74.42 mm,可计算x方向上的位移变化为
将信号发生器频率调为机器人共振频率240 Hz,电压为2 V,经功率放大器放大40 倍后输出到压电片上,此时将机器人左侧一半固定,右边一半悬空放置,如图9 所示.机器人腿部受到激励带动足端振动起来,由于达到了结构的共振频率,此时足端振幅最大,可采用合肥富煌君达高科信息技术有限公司的ISP502 千里狼高速摄像机(Revealer)记录下机器人足部x方向和y方向随时间变化的位移,设备如下图10 所示.

图9 压电力作用时驱动足的位移Fig.9 Displacement of the driving foot under the piezoelectric force
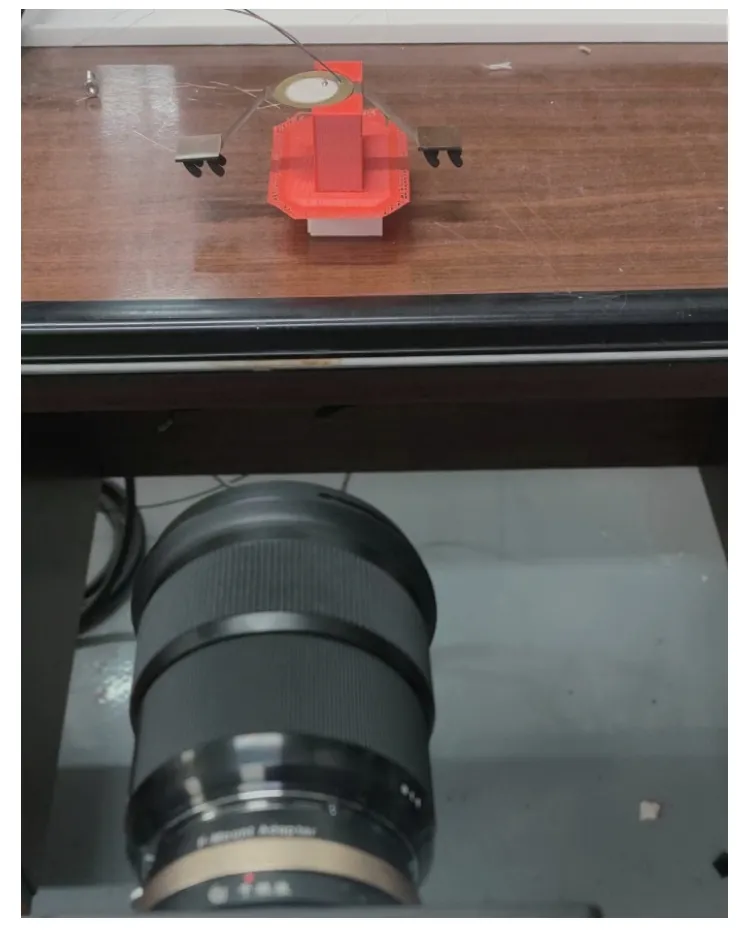
图10 高速摄像机拍摄足端振动Fig.10 High speed camera shooting foot end vibration
由图11 可以看到高速摄像机测得的y方向上的最大位移为0.299 62 mm,x方向上的最大位移为0.163 62 mm,而理论上的y方向和x方向上的振幅分别为 Δb=0.273 mm 和 Δa=0.128 mm.由于理论计算时忽略了连接到腿部连接板上驱动足的质量,在实验过程中,驱动足振动时的惯性会带动腿部的摇摆,因此会导致机器人足端位移的增加.可以看出实验测得的数据与理论计算所得的相差并不大,证明实验结果较为可靠.

图11 正弦波激励下机器人足部的振幅Fig.11 Amplitude of robot foot under sine wave excitation
3 实验验证
首先对机器人的单个运动单元节进行研究分析,实验需要仪器如图12 所示,通过信号发生器产生一定频率和电压的信号源,然后将此信号输入功率放大器的输入端,经过放大后输出到压电陶瓷铜片使其弯曲振动;当达到机器人的共振频率时,此时机器人驱动足的位移变化最大,由于与地面接触的足部前后两个方向的摩擦力大小不同,机器人会按照摩擦力小的方向开始运动.同时通过仿真和实验测试机器人不同的模态频率,当达到机器人的其他模态频率时,金属基体连接驱动足会产生相应的变形,从而带动机器人与地面发生相对运动,实现转弯功能.

图12 机器人实验流程图Fig.12 Robot experiment flowchart
将压电片下端铜片焊接线连接负极且设置为零电压,压电陶瓷上方焊接线接正极并输入周期性正弦电压信号.为了验证上述设计加工的压电机器人工作性能和相关参数,本文设计了相关实验来研究机器人的频率-速度关系、电压-速度关系以及不同承载位置下的负载能力等.实验中通过导轨来约束机器人单个运动单元节的直行,驱动足及直线导轨均为3D 打印PLA 材料.
通过实验从大范围来测试机器人在3 种不同足的驱动下速度较快的频率点,如图13 所示,可以看到在200 Hz 和500 Hz 处机器人速度值较大,然后将信号源的电压的频率设置在共振频率附近,驱动电压幅值恒定为80 V,驱动频率分别设置为190~270 Hz 和480~570 Hz.下面对不同类型的驱动足对在不同驱动频率下的机器人运动速度造成差异的原因进行分析.由图1 可得,斜面足与地面成一个45°的倾斜角度,相比于其他两种驱动足,它与地面之间的摩擦力显然更大,而且可以测得其所带来的前后方向摩擦力的差异相较于圆弧面足更小,因此在斜面足驱动下机器人运动速度最慢但最平稳,圆弧面与四圆弧体足与地面接触部分在建模时均由一段圆弧线扫描拉伸而成,由于圆弧面足在回退时其内表面更平滑,因此所带来的与运动方向相反的摩擦力较小,因此相同驱动频率下运动速度要比斜面足更快,四圆弧体足相比于其他两结构而言,其与地面具有更小的接触面,在驱动腿带动足部振动时,会受到摩擦、碰撞等多种工况作用,由于其与地面的接触面积较小,因此其能量的损耗也较小,综上可得,在圆弧体足驱动下机器人运动速度最快,但运动时稳定性相较于其他两足较差.

图13 3 种驱动足下机器人的频率-速度图Fig.13 Frequency-velocity diagram of three types of robots driving feet
之前对比了3 种不同驱动足下的频率-速度参数,得到结果为四圆弧体足的驱动效果最好,黑色尼龙足的结构形态也为圆弧体足,且尼龙的材料性能较 PLA 材料具有结构更轻,韧性和抗压强度更好,耐磨,表面更光滑且能够吸收冲击和振动等优点,为了形成与上述3 种结构之间的对比,因此将机器人的驱动足更换为材料性能更好的黑色尼龙驱动足进行实验,并且在共振频率附近处得到了在尼龙足驱动下的的机器人频率-速度曲线,可以看出机器人的速度特性确有提升.图14 为实验得到的频率-速度图,可以看到速度曲线在240 Hz 附近存在着一个峰值,这个峰值即对应着机器人驱动腿对应的低阶固有频率;与此同时频率-速度曲线在540 Hz 附近存在着另一个小的峰值,这个峰值即对应着机器人的高阶固有频率.实验曲线中的速度最高峰值出现在230~240 Hz 附近,这也与Comsol 当中的机器人结构固有模态的仿真结果能够对应上,在驱动频率为240 Hz 附近的速度为92.9 mm/s,而驱动频率为540 Hz 附近的速度接近60.2 mm/s.下面分析造成两谐振点处的速度值差距较大的原因,通过高速摄像机拍摄机器人驱动足部在不同谐振点振动的位移,可以看到在240 Hz 低阶固有频率下驱动足水平方向振动幅值更大,与地面之间的作用力也会更大,所以移动速度会更快,而在高阶谐振点时,足端在左右方向振动位移较小,因此速度较慢.
在确定机器人固有振动频率后,分别在设置为低阶固有频率和高阶固有频率的正弦波信号源的驱动下,来研究机器人移动速度与驱动电压之间的关系,驱动频率分别设置为240 Hz 和540 Hz.机器人的驱动足有3 种,分别为两圆弧面、四圆弧体和黑色尼龙材料驱动足.由于材料加工和人工装配误差等原因会导致机器人结构并不完全对称,造成机器人无法在不加约束的条件下直行,因此加工了长度为40 cm 的导轨(3D 打印PLA 材料),记录其在轨道上行走前20 cm 的时间,便可以计算得到机器人不同电压下的移动速度.
实验结果如图15 所示,可以看到,在240 Hz 驱动频率下,机器人的速度随电压的增加而增加,在尼龙足的驱动下,机器人的速度远远高于其他两足的速度,在110 V 时最快速度能达到14.2 cm/s,圆弧体足的速度高于弧面足,且随着电压的增加,机器人速度增加的趋势变缓,这是由于电压过大时,机器人足端振幅会过大,引起它在行进过程中跳跃,与地面接触不充分;在540 Hz 驱动频率下,机器人的速度也是随电压的增加而增加,在尼龙足的驱动下机器人速度最快,其他两足驱动下的速度差距不大,在实验中可以观察到在540 Hz 驱动频率下,机器人虽然在速度上略小于240 Hz 时的速度,但就运动平稳性上来说,在高阶固有频率下机器人更占优,且速度随电压变化较缓,在低电压驱动时,速度也不会过低,相比低阶固有频率具有一定优势;通过线性拟合可得到在尼龙足驱动下当激励信号频率为240 Hz 时,机器人电压-速度的一次方程为v1=0.208 8V-7.580 6,当在540 Hz 激励频率下尼龙足驱动时,机器人电压-速度的一次方程为v2=0.132 3V-3.659 1,其中驱动电压V的单位为V,速度单位为cm/s.

图15 不同驱动足下机器人移动速度随电压的变化Fig.15 The variation of movement speed versus voltage for robots with different driving foots
为了测试机器人在负载情况下的实验速度,在机器人的顶部圆形基底和两足端连接板处分别以圆形塑料片和铁片来模拟机器人在实际中的负载,实验照片如图16 所示,实验速度曲线如图17 所示.驱动频率分别设置为240 Hz 和540 Hz,施加在压电片上的电压为80 V,从图17 中可以看出,随着负载重量的增加,在大体的趋势上机器人的速度是不断下降的,当负载在两足端连接板上时,随着塑料片数量的增加,在负重1.6 g 时,机器人速度会有一个微小的提升,这是因为机器人承受一定负重时,竖直方向上的跳跃会减少,减少能量损失的同时会增加机器人与接触面的摩擦力,使得机器人的速度会增加一些;在更换负重为铁片时,在x=3.8 g 机器人速度有一个阶跃的提升是因为塑料片堆叠过高会导致机器人运动不平稳;当顶部圆形基底上的负重更换为铁片时,机器人速度会增加也是由于类似的原因,当堆叠过高会导致机器人运动时重心不稳,对运动时的干扰较大,负重更换为铁片时就解决了这一问题;在顶部负载0.8 g 时,应该是机器人在240 Hz 的驱动频率下的最佳负载,此时不仅竖直方向上的位移会减少,与接触面的摩擦力增大,而且在对比空载时的速度没有较大下降的前提下会使机器人运动的更加平稳.由此可以看出负载质量对机器人运动速度有较大影响,通过实验验证了机器人在240 Hz 的驱动频率下单个单元节无负载条件下速度可达92.9 mm/s,当在顶部加铁片负载2.5 g 时,移动速度可达58.7 mm/s.虽然机器人运动单元节最大负载能力有限,但在两足端连接板上负载超过自身重量15.2 g 时速度也可以达到21.2 mm/s.因此,在实际应用中机器人可以承担一些运输小型物品的功能;此外,将负重更换为微型传感器或摄像头时,也可以为人类探测一些较危险的地带,还能为机器人的实时运动提供反馈,使机器人的行进路线更准确.

图16 在不同位置负载的机器人Fig.16 Robots loaded at different positions

图17 不同负载位置下机器人的速度Fig.17 The speed of robots under different load positions
4 爬行机器人的控制
4.1 不同构型设计的爬行机器人
在驱动原理确定的基础上,可以将此两足压电结构当作一个模块单元,通过不同的连接方式和构型设计利用该单元节构造出多种不同结构构型的多足爬行机器人,以上实验研究主要是针对机器人的一个基础运动单元节来进行的,实验数据可以为之后更复杂构型的机器人结构提供参考,根据此结构的布局变化可以令爬行机器人有多种形态,如下图18所示.

图18 压电机器人的不同构型Fig.18 Experimental equipment for piezoelectric robots
之后本文设计制作了一种小型四足爬行机器人实物如图19 所示,整体结构由压电陶瓷片、机器人基体本身和粘贴的摩擦力驱动足构成.机器人基体结构为一体化设计,由0.2 mm 厚的铍铜板切割加工弯折而成,摩擦力驱动足被粘贴在足部连接板上,两片圆形蜂鸣压电片分别粘贴在机器人连接两弹性腿的圆形基底的上表面.将驱动部件与传动和执行元件整合为一体,结构设计简单,传动效率提高.

图19 压电驱动的四足爬行机器人实物图Fig.19 Manufactured prototype of the piezoelectric driven quadruped crawling robot
4.2 四足爬行机器人直走和转弯频率的实验验证
参考上面对两足机器人的实验研究,下文将对四足爬行机器人的性能参数进行研究.通过对四足机器人整体进行大量实验时可以得出: 当信号发生器产生频率为560 Hz 电压为2 V 的信号源,经过功率放大器放大后输出到压电陶瓷铜片上,机器人可以直行且此时移动速度较快,而且得到在PLA 板上运动时机器人的电压-速度关系如下图20 所示,通过线性拟合可得到四足机器人直线行走时的电压-速度关系约为v=0.058V-0.483 9,其中电压V的单位为V,速度单位为cm/s,电压范围为60~120 V;当调节机器人频率为520 Hz 时,可以带动机器人向左转弯,且转弯顺畅;当信号发生器输出频率为940 Hz 左右电压不变的信号源时,机器人可以实现右转的功能.此外,当信号发生器频率为560 Hz时,也可以调节两个单元节上压电陶瓷片上的电压,当左侧电压较大时,机器人左侧受到的驱动力更大,会使其向右转动,同理可得,当右侧压电片上的电压调大时,机器人会向左转弯.与此同时,可以在Simulink中搭建一定的程序,搭配不同频率和电压的信号源,以及一些控制输入的模块,将此程序连接到Quanser半物理仿真平台;然后通过电压放大到机器人压电片上,即可通过更换不同的指令让机器人进行直行或转弯等一系列动作,实验装置图如图21 所示.

图20 在560 Hz 时机器人的电压-速度图Fig.20 Voltage-velocity diagram of the robot at 560 Hz

图21 压电机器人的实验设备Fig.21 Experimental equipment for piezoelectric robots
对机器人在560 Hz 驱动频率下在不同接触面上的电压-速度进行研究,图22 为机器人在电压60~110 V 区间内在不同面上运动时的速度曲线,可以看出随着接触面粗糙度的增加,同一驱动电压下机器人的速度是逐渐降低的,从木板到办公桌面随着粗糙度的减小,运动速度增加,但太过于光滑的表面也会导致机器人运动时足部与接触面打滑(比如玻璃板),使得运动速度下降,因此当机器人在适中的粗糙度接触面(塑胶地)上的运动速度最快.实验研究表明,设计的四足机器人可以很好地运用于各种环境以及不同粗糙度的接触面.

图22 不同接触面上的速度Fig.22 Velocity of the robot on different contact surfaces
4.3 展望
Simulink 是Matlab 中的可视化仿真工具,它支持系统仿真、程序设计、系统控制和信号处理等方面.Quanser 半物理仿真平台[36]、与Simulink 接口板卡和Windows 在线控制程序Quarc 等,能够直接将计算机与受控对象相连,构成闭环控制结构.
通过在Simulink 中编译程序来对一些结构进行智能化控制,可以将该工具运用到压电机器人的控制当中让机器人实现预期化的运动,从工程应用的角度来说,不仅需要提供一个稳定的电压驱动压电机器人运动,还需要让压电片驱动机器人结构在给定速度下进行直线运动,才能适应各种实际需求.可以基于PID (proportional,integral,differential)控制器,在Simulink 中设计一种控制压电驱动爬行机器人速度的模型,来使机器人实现给定速度下的稳定运动,然后连接到Quanser 半物理仿真平台对压电驱动四足爬行机器人的直行和转弯运动进行控制实验,在线控制程序Quarc 能够启动Simulink 模型生成的代码,向板卡发送命令或从板卡输出端收集反馈回的数据,达到实时控制的目的,而且可以通过反馈的实时速度来改变程序中的参数使机器人实现预期下的运动.分析对比实验与理论的误差,并进一步优化控制模型,为以后更精确控制压电爬行机器人的速度模型提供参考.
首先,对机器人单个模块单元即两足压电结构进行驱动和控制,通过之前实验测得的电压-速度数据以及拟合方程,将其输入到程序中建立两足机器人速度与驱动电压的关系模型,然后在程序中设置期望速度与行走时间,最后启动仿真控制程序连接到Quanser 板卡上并通过激光位移传感器传输回采集的数据从而实现反馈控制,图23 为机器人在轨道上的行走.通过实验可以发现两足机器人在程序驱动控制下,行走并不稳定且机身摇晃较剧烈,因此开始对四足机器人进行实时控制实验,将特定程序代码输出到板卡连接到功率放大器然后输出到两个压电片上,研究结果发现驱动效果较好,比两足结构运动更稳定.图24 为通过Simulink 搭建模型然后连接到板卡,设置机器人在程序启动1 s 后开始运动到8 s 时停止运动,在此期间实现期望速度为5 cm/s 的直线运动,通过激光位移传感器实时采集得到位移数据微分后得到速度数据,由于激光位移传感器采集传输回的位移数据比较杂乱,干扰较多,因此在模型中加入滤波器模块,将滤波器过滤掉杂波后的位移数据经过限幅和微分后反馈到PID 模型中,让程序自动调节输出到功率放大器上的电压参数,使得机器人实现期望下的运动,图25 即为设置的目标速度以及加上反馈后经PID 调节后的拟合曲线,此时比例参数P值为2,积分参数I值为0.3,D值为1.

图23 两种机器人在轨道上的运动控制Fig.23 Motion control of two types of robots on orbits

图24 通过Simulink 搭建模型连接到板卡Fig.24 A Simulink model connected to the card

图25 期望速度与经PID 调整后的速度曲线Fig.25 Expected speed and PID adjusted speed curve
未来可以用Simscape 模块来对机器人的运动进行路径规划,通过一系列数据点的设置,设定程序来计算出两端驱动腿所需要达到的速度,进而得出压电片上所需的电压,再通过功率放大器放大到压电片上,从而使机器人完成规划下的运动.
将本文的压电机器人与近年来其他文献中压电机器人在重量、运动速度、驱动器末端位移、最大负载、移动灵活性和可控性等方面的参数作对比,可以发现现有压电机器人存在执行机构的驱动位移较小以及在复杂环境下移动与作业的能力不佳等问题,本文设计的机器人相比于现有的一些压电机器人具有较快的移动速度和良好的移动灵活性,且具有较好的负载能力,可承载微型摄像头和传感器以勘测环境,且可通过仿真程序对其进行实时控制来完成未知环境下的作业.
5 结论
本文设计了一种可以在各种平面上稳定运动的谐振式压电爬行机器人,并利用振动力学和材料力学方法对该机器人建立了整体受力分析方程,得到了以下结论.
(1)利用压电片逆效应设计出了一种新型的机器人结构,期望能按照预定方向去行走,其具有速度快、易控制等特点.
(2)通过Comsol 对机器人单元节的分析,得出了两足机器人受到交变压电力时的应力-应变和运动原理,通过大量实验分析总结出驱动电压和机器人行进速度的关系,并分析不同种类驱动足对机器人移动速度的影响,然后通过实验验证了机器人的低阶和高阶固有频率与仿真结果较为吻合.此外,还对两足机器人在不同位置负重时进行了实验,得出当顶部负载2.5 g 时,机器人的峰值速度接近58.7 mm/s,在两足端连接板上负载15.2 g 时速度也可以达到21.2 mm/s.证明该机器人在工程探测、抢险救援等方面具有潜在应用价值.
(3)当通过Simulink 程序连接半物理仿真平台Quancer 板卡利用不同频率和幅值的驱动电压控制四足爬行机器人时,实现了左转、右转和绕自身圆心自转以及期望速度下的近似直线运动.未来可以对机器人的运动进行路径规划,使机器人行进过程更精确,更加完美地完成期望的路线.
猜你喜欢
汽车实用技术(2022年7期)2022-04-20
房地产导刊(2020年11期)2020-12-28
天天爱科学(2020年6期)2020-09-10
铁道通信信号(2019年4期)2019-10-10
压电与声光(2019年1期)2019-02-22
铜仁学院学报(2018年6期)2018-07-05
美术文献(2016年6期)2016-11-10
通信电源技术(2016年1期)2016-04-16
全球定位系统(2015年4期)2015-02-28
振动、测试与诊断(2014年6期)2014-03-01
