某保温箱顶盖同步控制策略研究
2023-11-06 09:03乔西宁王志勇李德忠
导弹与航天运载技术 2023年4期
乔西宁,王志勇,李德忠
(北京航天发射技术研究所,北京,100076)
0 引 言
某保温箱顶盖系统由左右舱盖两部分组成,驱动方式为电驱。为降低单电机驱动功率,单边舱盖由前、后两个电动缸驱动。由于舱盖前后尺寸较长,且舱体主体材料为复合材料,在舱盖运动过程中易产生变形,为保证舱盖的密封性,避免舱盖运动过程中前后电动缸不同步造成疲劳损坏,对前后电动缸的同步精度提出了很高的要求。
由于单边舱盖由前后两个电动缸驱动,为保证较高的控制精度,采用速度环、位置环的双闭环控制策略。试验过程中发现,经典PⅠD控制算法的控制精度受负载影响较大,风载、温度变化、机构磨损等带来的负载变化均会影响舱盖电动缸的同步控制精度,导致舱盖启动与停止时刻的精度难以满足指标要求。近年来,模糊PⅠD控制算法在工业自动化领域的应用越来越广泛,如轨迹跟踪、温度控制、电液控制系统等[1-3],模糊PⅠD控制器具有参数适应性强、响应速度快、控制精度高的特点,因此,针对该问题,设计了一种模糊PⅠD控制器,并将其应用于前后电动缸的位置闭环控制,提高了保温箱顶盖系统的同步精度与抗干扰能力。
1 保温箱顶盖系统组成及控制
单边舱盖机构组成如图1所示。舱体具有整车保温舱的密封、防雨功能。电动缸为前后各1个,图示位置处重叠,前后两电动缸的位移通过位移传感器反馈至控制器,完成双缸同步控制。舱盖开关到位的极限位置由接近开关反馈,确保舱盖运行安全。
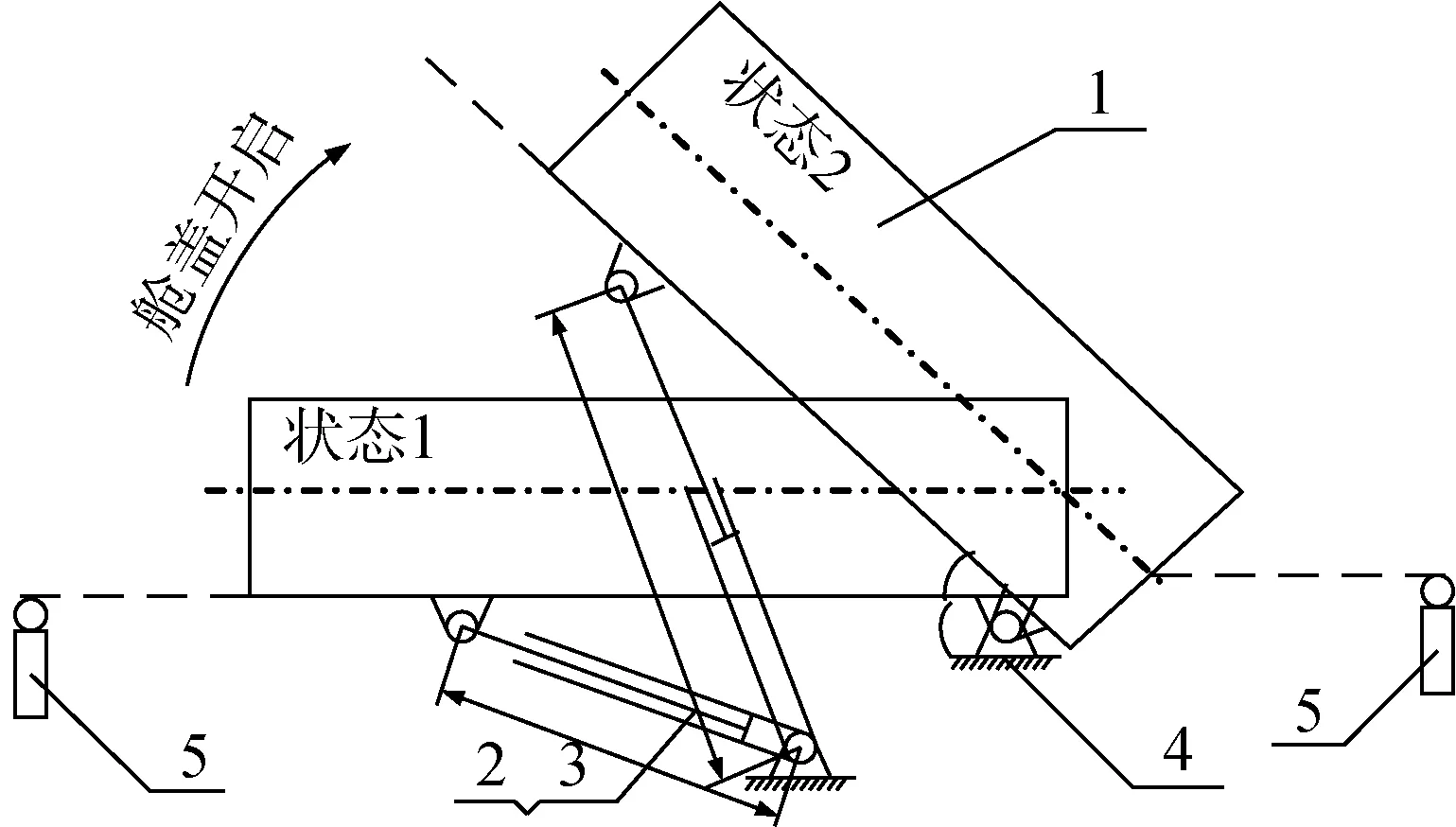
图1 单边舱盖机构组成示意Fig.1 Schematic diagram of unilateral hatch cover
1.1 系统主要参数
电动缸在电机驱动下,将电机轴的旋转运动转换为电动推杆的直线运动。电动缸结构如图2所示。
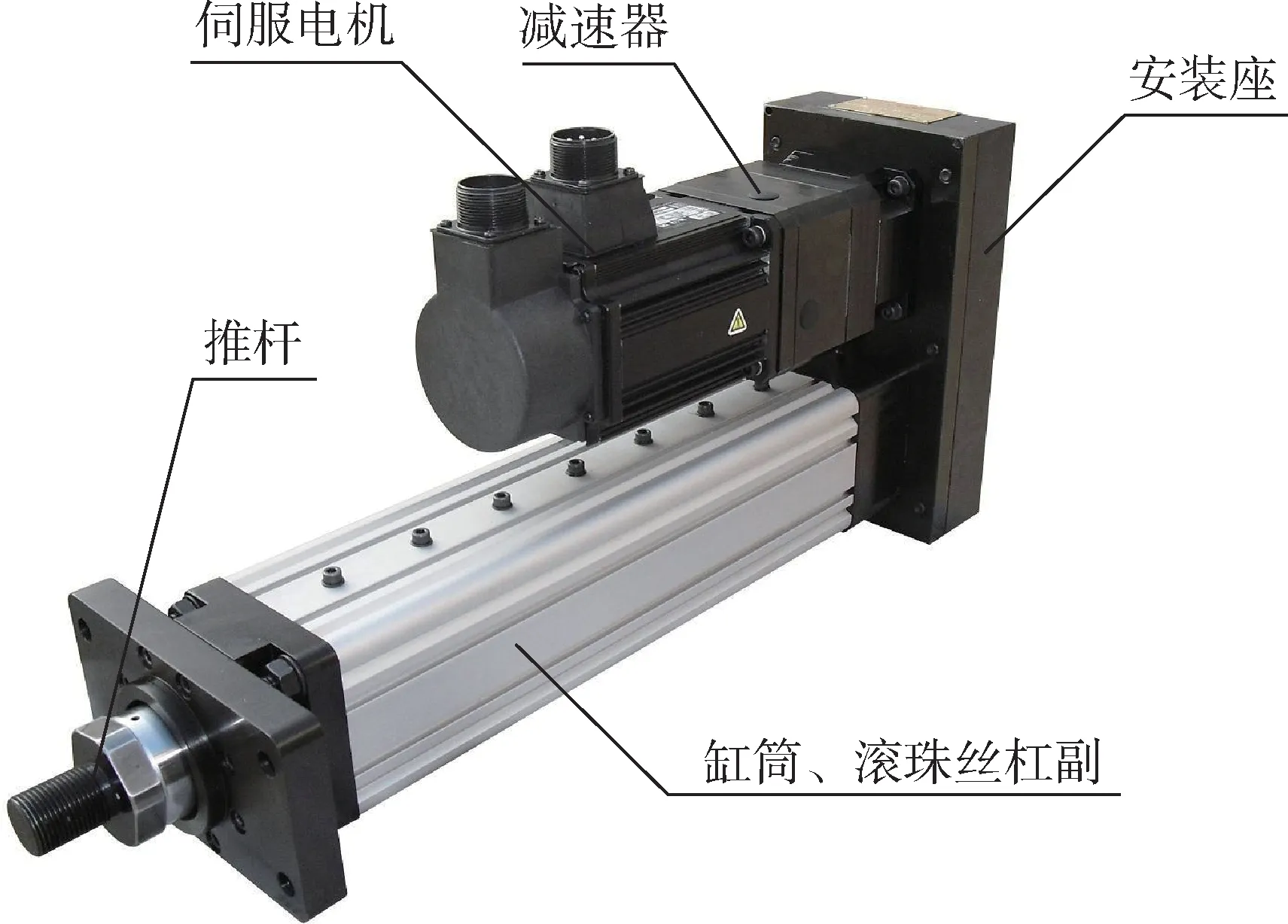
图2 电动缸结构Fig.2 Structure of electric cylinder
电动缸位移与电机转角的换算公式为
式中SL为电动推杆位移,单位为mm;θm为电机轴转角,单位为rad;P为丝杠导程,单位为mm;i为减速比。
忽略电机轴的弹性变形,电机轴转矩与电动推杆负载之间的换算公式为
式中TL为电机轴输出力矩,单位为N·m;JD为电机轴等效转动惯量,单位为kg·m2;B为电机轴等效阻尼系数,单位为(N·s)/m;Kt为转矩常数,单位为(N·m)/A;I为电机电流,单位为A。
舱盖系统的主要特性参数如表1所示。
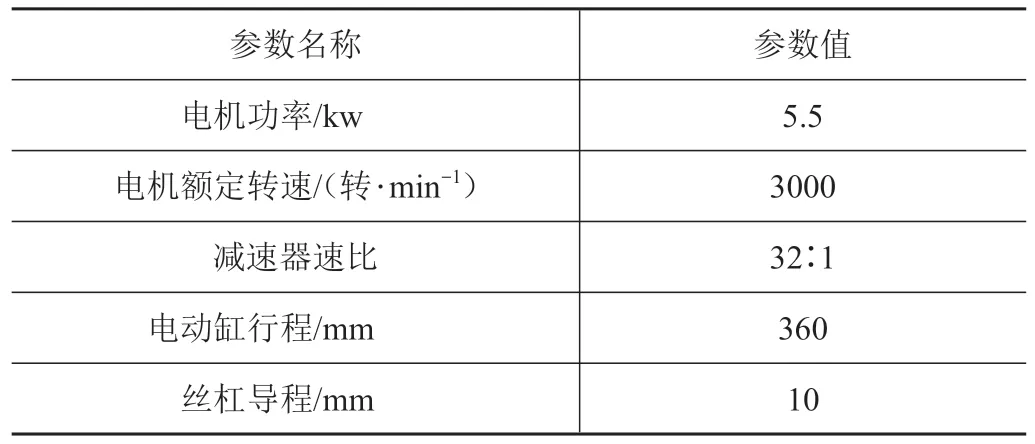
表1 特性参数Tab.1 Characteristic parameters
1.2 控制系统设计
控制器接收主机的开盖、关盖指令,通过电机驱动器驱动电机控制电动缸的伸收,完成舱盖的开关动作。通过位移传感器采集前、后电动缸各自的位移信息,将前后电动缸位移差通过闭环控制运算后对后电动缸的转速进行补偿,进而完成前后电动缸的位移同步控制。通过接近开关到位信号进行舱盖开关到位极限位置判断,起到安全保护作用。根据结构布置及驱动形式,舱盖控制系统如图3所示。
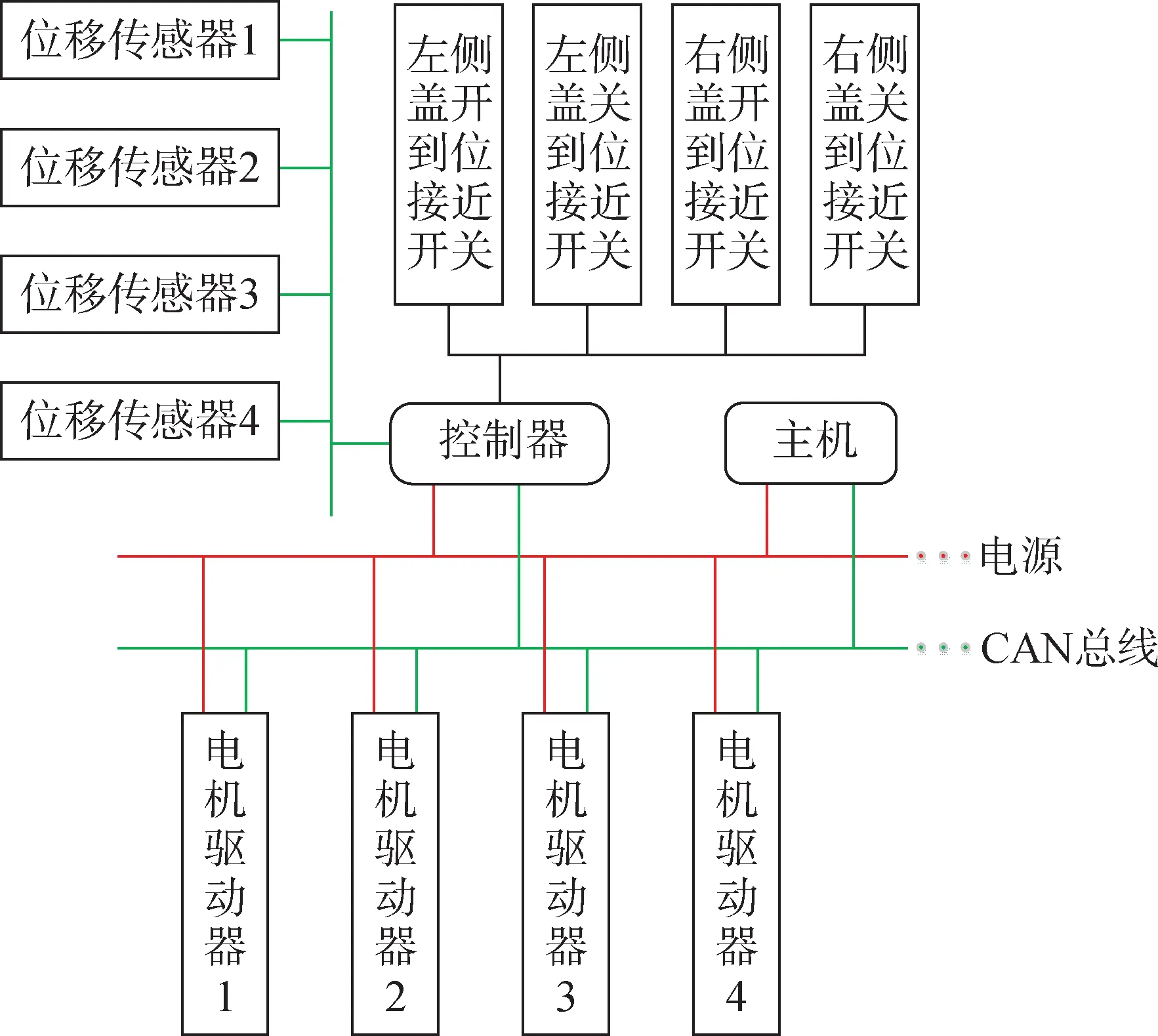
图3 控制系统Fig.3 Schematic of control system
2 控制算法设计
2.1 控制指标要求
舱盖系统控制指标要求如表2所示。
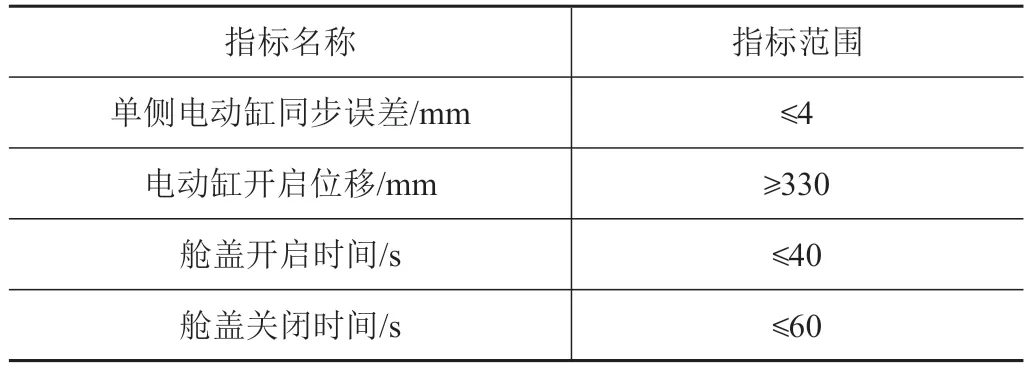
表2 指标要求Tab.2 Ⅰndex requirements
2.2 控制策略设计
为保证单侧舱盖前后电动缸的同步精度,前电动缸采用速度环控制,根据不同的运动区间,规划不同的目标速度。速度环控制偏差在时域上的积分将导致位置控制精度随时间的延长逐渐变差。后电动缸采用速度环、位置环控制,在速度环的基础上,引入前后电动缸的位移差对目标速度进行补偿。控制框图如图4所示。
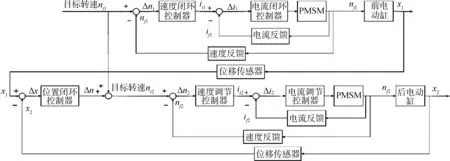
图4 控制原理Fig.4 Diagram of control block
2.3 经典PⅠD控制试验结果分析
舱盖电动缸的速度环、位置环的闭环控制均采用经典PⅠD控制算法。
经典PⅠD调节的控制算法如式(3)所示:
式中Kp,Ki,Kd分别为比例、积分、微分常数;T为控制器闭环控制周期;ek为当前循环的控制偏差;ek-1为上次循环的控制偏差。受总线型位移传感器的传送周期限制,控制器闭环控制周期为10 ms,微分常数设置为0。
舱盖控制系统调试完成后,通过主机对总线数据进行采集,由于发射车左侧盖右侧盖是对称的,仅对单边舱盖试验数据进行分析。
以右侧电动缸为例,右侧前电动缸位移及电机转速曲线如图5所示。舱盖完全开启时,对应的电动缸位移为338.3 mm,满足位移要求。舱盖开启时间为32.33 s,满足时间要求。
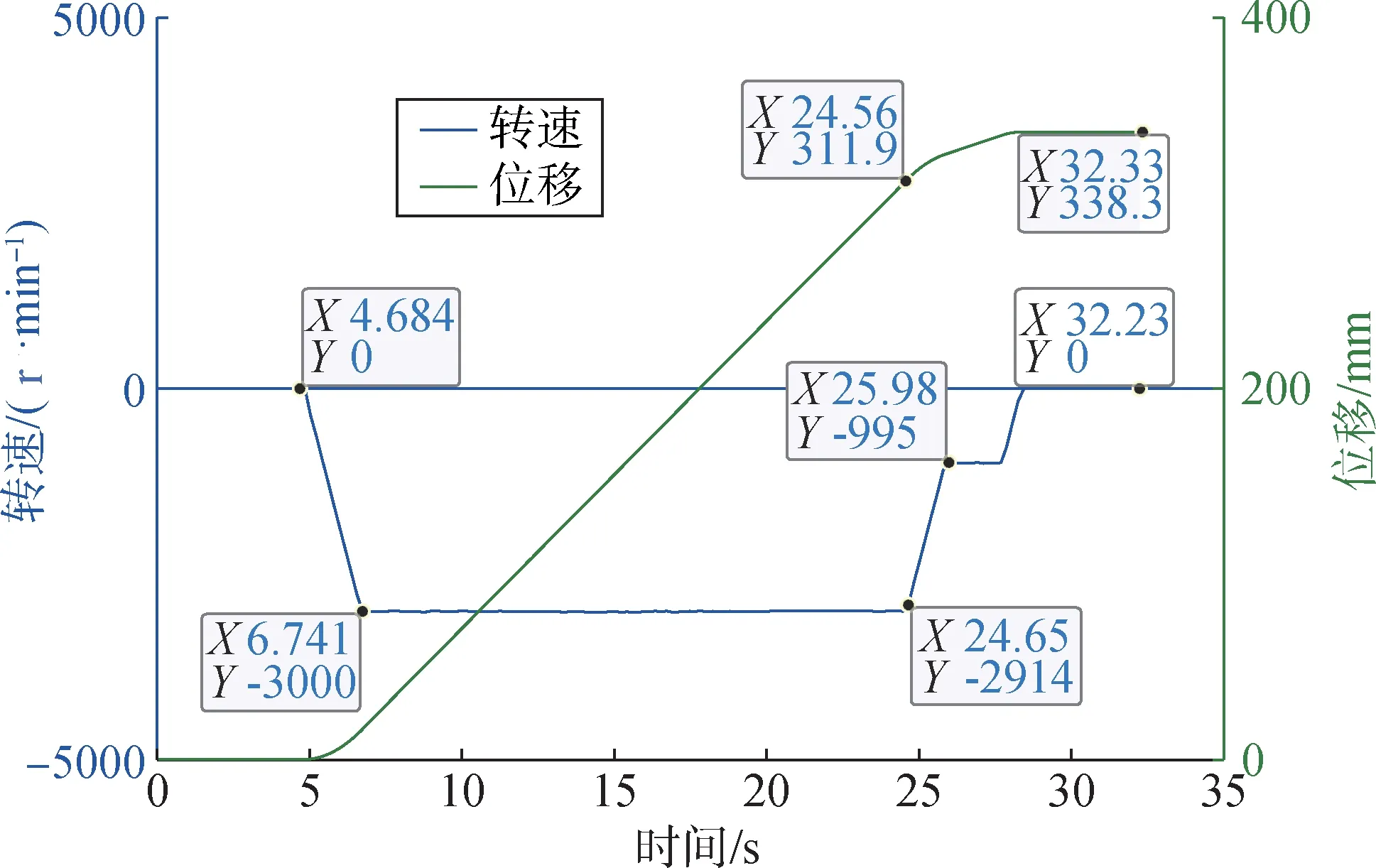
图5 电动缸位移、转速曲线Fig.5 Displacement curve of electric cylinder
右侧舱盖前后电机的转速差及电动缸位移差曲线如图6所示。
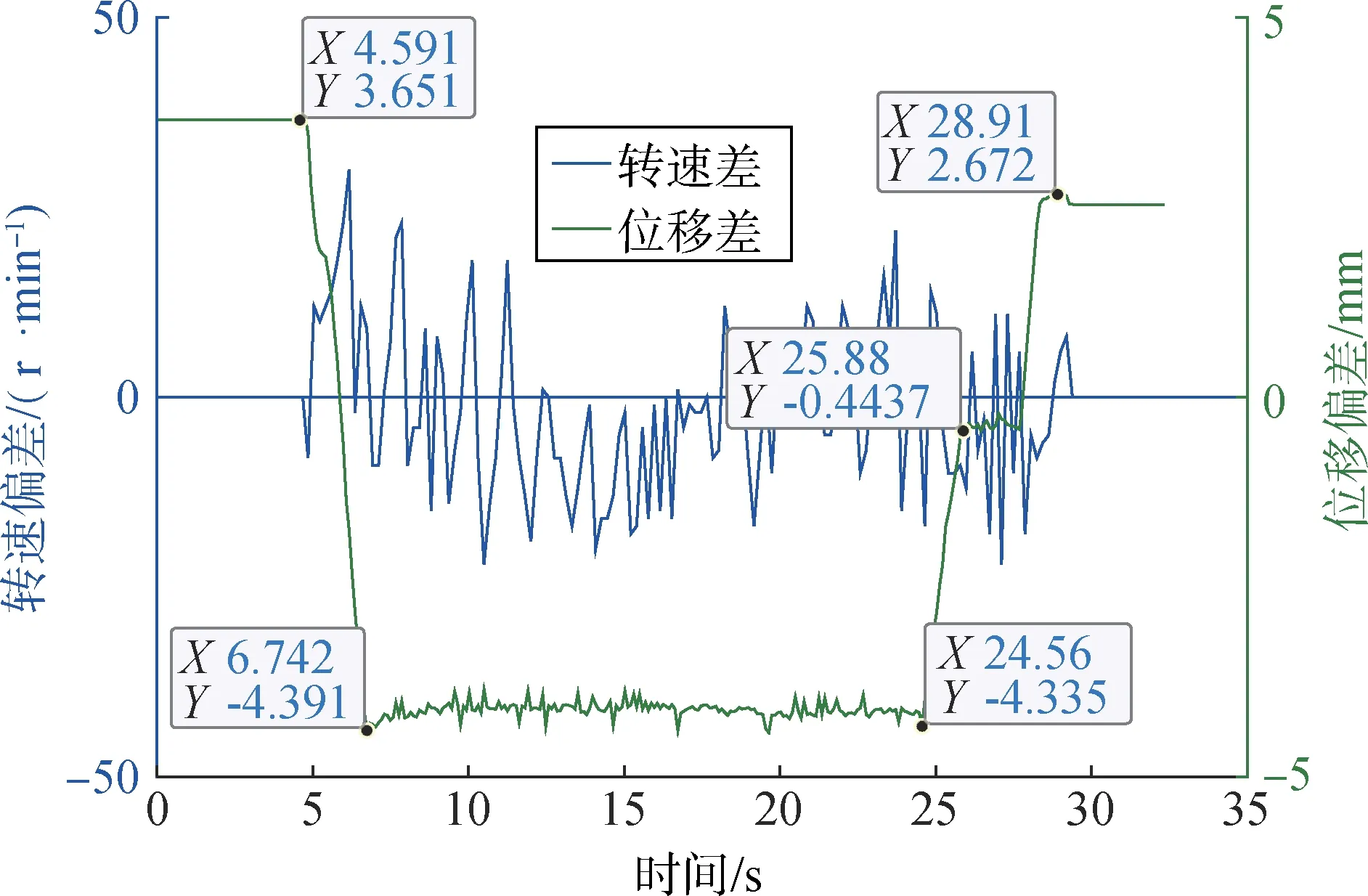
图6 前、后电动缸转速、位移偏差曲线Fig.6 Deviation curve of front and rear electric cylinder speed and displacement
由图6 可知,在4.59~6.74 s 区间内,位移偏差从3.65 mm 变为-4.39 mm,在24.56~25.88 s 区间内,位移偏差从-4.3 mm 变化为-0.44 mm。对比图5,位移偏差的变化与转速变化的区间相吻合,位移偏差变化发生在转速变化过程中。由于前后电动缸的速度环动态特性存在差异,位置环控制精度受转速变化较为明显。在电机高速运转后,位置环稳态误差为-4.39 mm,不满足指标要求。
结合式(3),比例、积分系数为固定值,若设置较大的值,在前电动缸从高速切换低速后容易引起后电动缸的位置超调,若设置较小的值,后电动缸的响应速度与前、后电动缸的稳态控制精度会受影响,位置环的控制偏差发生变化时,应及时调整比例、积分系数以保证控制精度满足控制指标要求。
3 模糊PⅠD控制器设计
3.1 控制原理
为克服经典PⅠD 控制算法的不足,将图4 中的位置闭环控制器改进为模糊PⅠD控制器,使得控制参数能够根据控制偏差及偏差变化率进行实时调整[4]。以控制偏差Δx、变化率Δẋ作为模糊推理机的输入,模糊推理后输出ΔK͂p、ΔK͂i,然后逆模糊化得到实际修正量ΔKp、ΔKi。依据式(4)对比例、积分系数进行实时修正:
电动缸位置环模糊PⅠD控制器原理如图7所示。
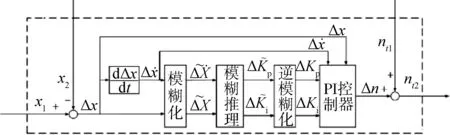
图7 模糊PⅠD控制原理Fig.7 The principle block diagram of fuzzy PⅠD control system
3.2 模糊化、逆模糊化处理
模糊集[5]选取{NB、NM、NS、ZO、PS、PM、PB},即{负大,负中,负小,零,正小,正中,正大}。比例系数初值Kp0,积分系数初值Ki0初值为6.5、1.2。由图6 可知,位置偏差Δx一直在区间[-4.42,2.67] 内,偏差Δx的变化率Δẋ一直在区间[-7.86,5.27]内。偏差Δx、偏差变化率Δẋ、比例系数修正量ΔKp、积分系数修正量ΔKi论域均取为[-10,10],量化因子依次取2.82、0.76、1.54、8.33。
选取三角函数和钟形函数相结合的隶属度函数[6]。隶属度函数如图8、9所示。
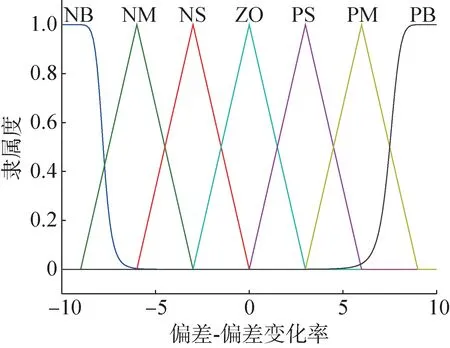
图8 Δx,Δẋ隶属函数Fig.8 Membership function of Δx and Δẋ
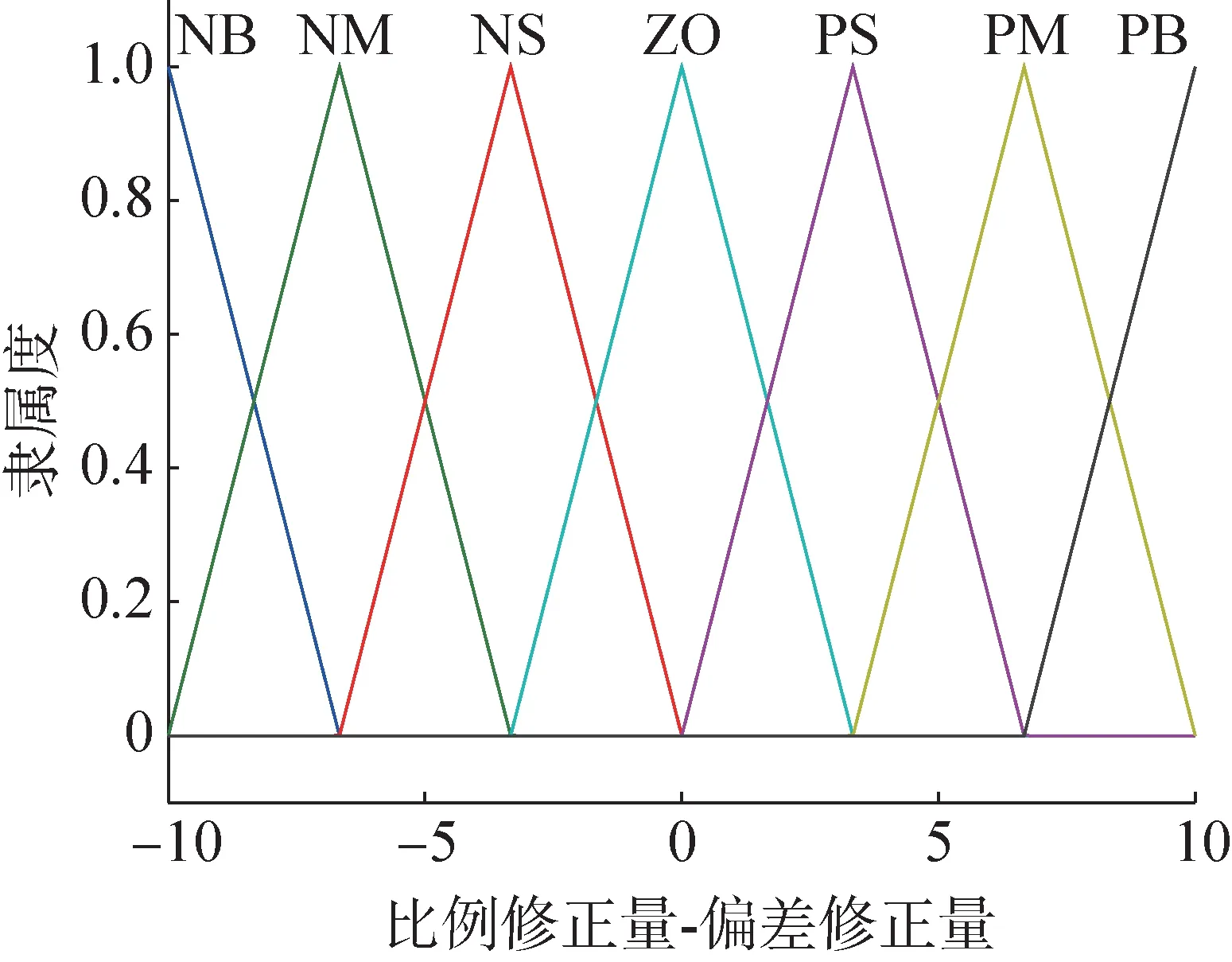
图9 ΔKp,ΔKi隶属函数Fig.9 Membership function of ΔKp and ΔKi
3.3 模糊判决
根据比例系数、积分系数对系统的影响,在提高系统响应速度的同时,避免积分饱和,制定模糊规则表[7],如表3、4所示。
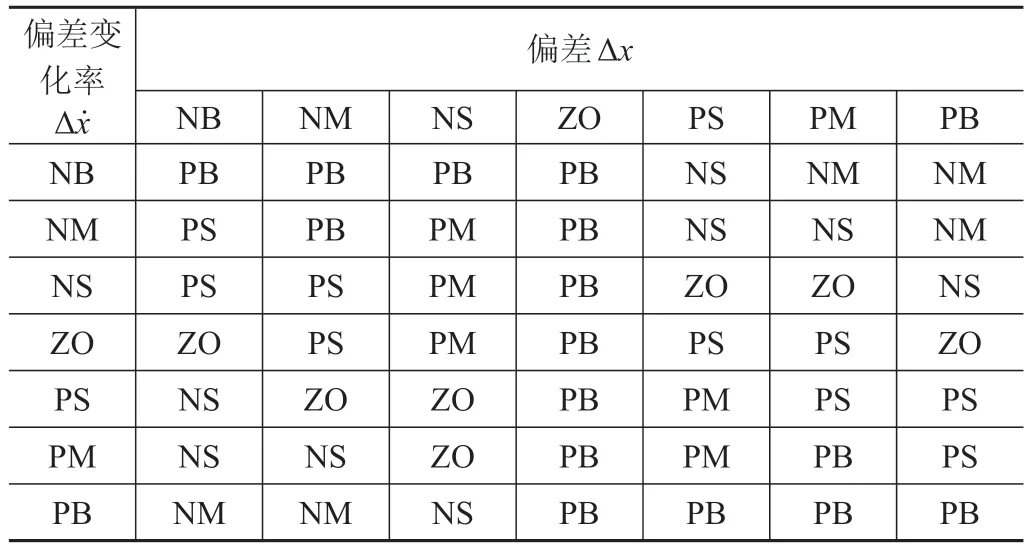
表3 Kp的模糊规则表Tab.3 Fuzzy rule table of Kp
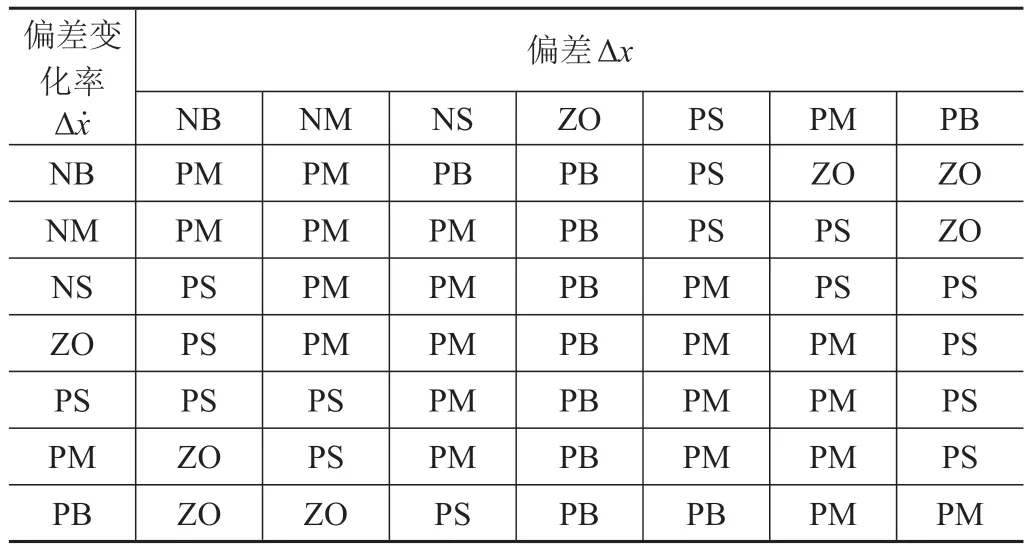
表4 ΔKi的模糊规则表Tab.4 Fuzzy rule table of ΔKi
4 试验数据分析
4.1 模糊PⅠD控制器试验
根据制定的隶属函数及模糊规则表,生成ΔKp、ΔKi调整矩阵,对电动缸位置闭环进行改进,试验结果如图10所示。
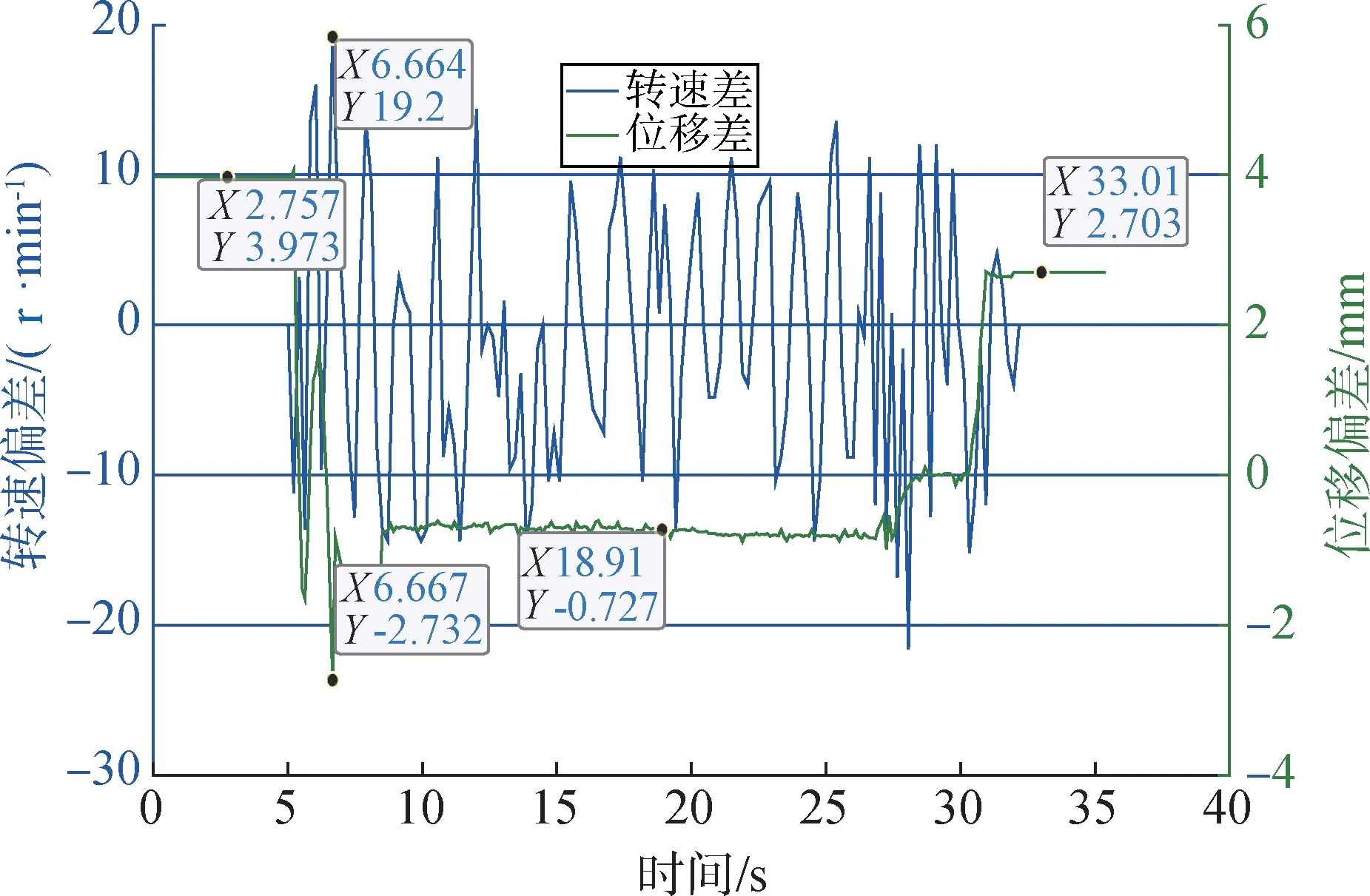
图10 前、后电动缸位移、转速偏差曲线Fig.10 Deviation curve of front and rear electric cylinder speed and displacement
由图10 可知,转速偏差最大为19.2 r/min,运行过程中的最大位移偏差为-2.73 mm,发生在电机由0向-3 000 r/min加速过程中。
4.2 试验数据对比分析
由图11可知,引入模糊控制对比例、积分系数进行实时整定后,对比图5 发现,在0 r/min 加速至-3 000 r/min 后位移偏差快速收敛,最终稳定在了-0.72 mm。-3 000 r/min 减速到-1 000 r/min 后的稳态误差由-0.368 mm缩小到了0.017 mm。
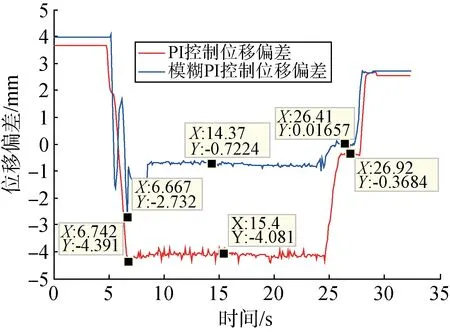
图11 电动缸位移偏差对比曲线Fig.11 Comparison curve of displacement deviation of electric cylinder
5 结 论
保温箱控制系统中,针对电动缸双缸同步控制偏差易受转速变化影响的问题,设计了模糊PⅠD控制器对位置环进行改进,试验结果表明,较之经典PⅠD控制器,模糊PⅠD控制器的电动缸位置同步控制精度更高,能够满足控制指标要求,具有一定的工程实践意义。
猜你喜欢
商品与质量(2021年29期)2021-11-24
起重运输机械(2021年19期)2021-03-15
家庭医药(2020年20期)2020-12-04
家庭医药·快乐养生(2020年10期)2020-11-06
时尚育儿(2019年2期)2019-06-11
宇航计测技术(2018年3期)2018-09-08
中国修船(2018年4期)2018-01-26
物联网技术(2017年7期)2017-07-20
国际公关(2015年10期)2015-12-17
纺织导报(2014年9期)2014-10-31