
基于大幅值Lyapunov轨道稳定流形的地月转移方法*
2023-11-11 02:16郑越,赵敏
航天控制 2023年5期
郑 越,赵 敏
1. 西安航空学院,西安 710077 2. 西北工业大学航天学院,西安 710072
0 引言
地月转移轨道设计是探月工程的关键问题。传统地月转移轨道的设计通常基于二体霍曼转移[1]方法,具有燃料消耗大的缺点,不能满足未来低成本航天任务需求。与之相比,基于限制性三体问题的地月转移轨道充分利用了三体系统的动力学特性,有效降低了转移过程中所需的能耗,这种轨道通常被称为低能转移轨道[2]。
在地月三体系统中,不变流形是与平动点密切相关的一种动力学结构,探测器运行在不变流形上能够不耗能地实现空间转移。位于月球正面的平动点L1点和位于月球背面的平动点L2点,由于周围的力场环境,使得其不变流形为地月转移提供了可行途径[3]。根据平动点位置不同,地月转移可分为基于L2点不变流形的外俘获型低能转移轨道和基于L1点不变流形的内俘获型低能转移轨道。根据不变流形的相流结构,内俘获型低能转移轨道可通过穿越轨道和渐近轨道来进行设计[2]。
弱稳定边界(weak stability boundary, WSB)理论对应于外俘获型低能转移轨道,是1987年由Belbruno[4]首次提出的。WSB是相空间中太阳、地球和月球万有引力趋于平衡的区域。这类轨道从地月系统外部进入系统内部再被月球捕获,需要借助太阳的引力辅助[5]。Koon等[6]将地月三体系统L2点稳定流管与日地三体系统平动点的不稳定流管在适当的庞加莱截面内进行拼接,得到的位置及速度均连续的轨迹即为Belbruno所发现的WSB转移。但是,探测器在外俘获型低能转移轨道中会因太阳引力而远离地球和月球,所以需要较长的转移时间。
内俘获型低能转移轨道始终处于地月系统内,可通过L1点周期轨道的不变流形来实现,这类轨道始终处于地月系统内,可减小探测器的飞行时间。当L1点周期轨道的幅值较小时,其不变流形能够形成管状结构,探测器可通过流管内部的穿越轨道,实现从地球区域到月球区域的空间转移,但却不能到达近地轨道和近月轨道[7]。现有方法通常增加两段轨道,分别将L1点周期轨道流向地球区域的稳定流形与近地轨道拼接,将流向月球区域的不稳定流形与近月轨道拼接[8]。每段轨道的拼接,至少需要增加一次脉冲。目前通常将不变流形上相对于主天体的位置与速度相互垂直的点作为拼接点,再将霍曼转移轨道与不变流形进行拼接[9]。除此之外,连一君[10]通过lambert轨道段连接不变流形;Alessi等[11]从稳定流形的近地点和远地点中挑选拼接点来连接地球停泊轨道;徐明等[12]利用小推力实现了轨道拼接。
如果增大L1点周期轨道的幅值,不变流形可达到近地轨道和近月轨道,但却不能形成流管,探测器只能沿着不变流形,作为周期轨道的渐近轨道来实现地月转移。谭明虎等[13]利用与绕月轨道相切的大幅值Lyapunov轨道,将地月转移问题转化为地球停泊轨道到大幅值Lyapunov轨道的渐近转移问题。尽管省去了额外的拼接轨道,但作为渐近轨道,稳定流形在接近Lyapunov轨道时都会在其附近飞行数圈且永远不能到达这个轨道,必然会增加转移时间和速度脉冲。
针对现有的基于不变流形的地月转移轨道设计方法存在的转移时间长、需要额外速度增量的缺点,本文设计了一种基于大幅值Lyapunov轨道稳定流形的地月低能转移方法。该方法以与月球停泊轨道相切的Lyapunov轨道作为参考轨道,再根据稳定流形与Lyapunov轨道之间的偏差对其进行调整,最终通过一条稳定流形直接连接近地轨道与近月轨道进而实现地月转移。本文所设计的转移轨道在同样仅需要2次速度增量的条件下,相比现有的基于大幅值Lyapunov轨道的地月转移方法节省了轨道转移时间;相比霍曼转移节省了能耗,实现了地月低能转移。
1 地月三体系统
1.1 动力学模型
考虑地月圆型限制性三体问题(circular restricted three-body problem,CRTBP),质量可以忽略的探测器在地球和月球两个主天体的引力作用下的运动,其中主天体绕其公共质心做匀速圆周运动[14]。归一化地球质量m1和月球质量m2之和为单位质量(m1/m2=0.0123),则:
(1)
(2)
其中:Ω为旋转坐标系下的等效势能:
(3)
设矢量r1和r2为探测器到两个主天体的距离,有:
(4)
CRTBP系统中,存在雅可比积分如下:
(5)
在地月三体系统中,单位长度为地月之间的距离L=3.844×105km,单位时间为T=104 h,单位速度为V=1024 m/s。
1.2 大幅值Lyapunov轨道及其不变流形
在地月CRTBP下,平动点周期轨道中的任意一点都可以演化出4条不变流形[2]。对于位于地球和月球之间的平动点L1点,其Lyapunov轨道必然会存在1条流向地球方向的稳定流形。探测器在不变流形上运行时,可不耗能地实现空间转移。当Lyapunov轨道的幅值越大时,系统的雅可比常数越小,而雅可比常数值决定了其不变流形的可达区域。当L1点Lyapunov轨道取较大的幅值使其与月球停泊轨道相切于x轴时,一方面,通过一个切向速度脉冲可以使探测器直接从Lyapunov轨道进入月球停泊轨道;另一方面,Lyapunov轨道流向地球方向的稳定流形可直接到达地球附近。

Xd=[0.983068,0,0,-2.35925]T
(6)
轨道的周期和雅可比常数分别为:
Td=7.27655,Cd=2.46791
(7)
如图1所示,Lyapunov轨道与月球停泊轨道在Xd点相切,探测器在切点能够通过脉冲减速从该Lyapunov轨道进入月球停泊轨道(本文轨道均采用无量纲坐标系)。所以,在探测器到达切点时,可以通过速度的减小,即增大系统雅可比常数来实现从Lyapunov轨道到月球停泊轨道的转移。

图1 大幅值Lyapunov轨道与月球停泊轨道相切减速示意图
λ1=λ2=1,λ3=0.00208529,
λ4=4.79549×102
(8)
其中:特征值λ3对应的特征向量为:
ed=[-0.00261860,-0.00277165,
0.807490,0.589868]T
(9)
Lyapunov轨道稳定流形的计算方法是通过对轨道上的点X施加一个小偏差量来确定初始状态,再反向时间积分来计算。稳定流初始点的计算公式为:
Xs(Xd)=Xd±εed
(10)
其中:ε为一个正的小偏差量,代表不变流形积分初值与Lyapunov轨道上点X的偏差。式(10)中的正号和负号代表稳定流形的正负两个分支,分别流向地球方向和月球方向。当稳定流形能够到达地球附近时,则可通过一个速度脉冲使探测器离开地球停泊轨道进入稳定流形。初始状态为Xd的大幅值Lyapunov轨道稳定流形的正分支如图2所示。尽管大幅值Lyapunov轨道的稳定流形不再具有管状结构,但是与小幅值Lyapunov轨道的稳定流形相比,它们可以到达更加接近地球附近的区域,从而方便探测器从地球停泊轨道切向进入稳定流形。如果选择距离地球表面167 km,即距离地心半径为RE=0.0170265的近地轨道作为地球停泊轨道,那么这个大幅值Lyapunov轨道稳定流形的正分支可以直接到达地球附近。
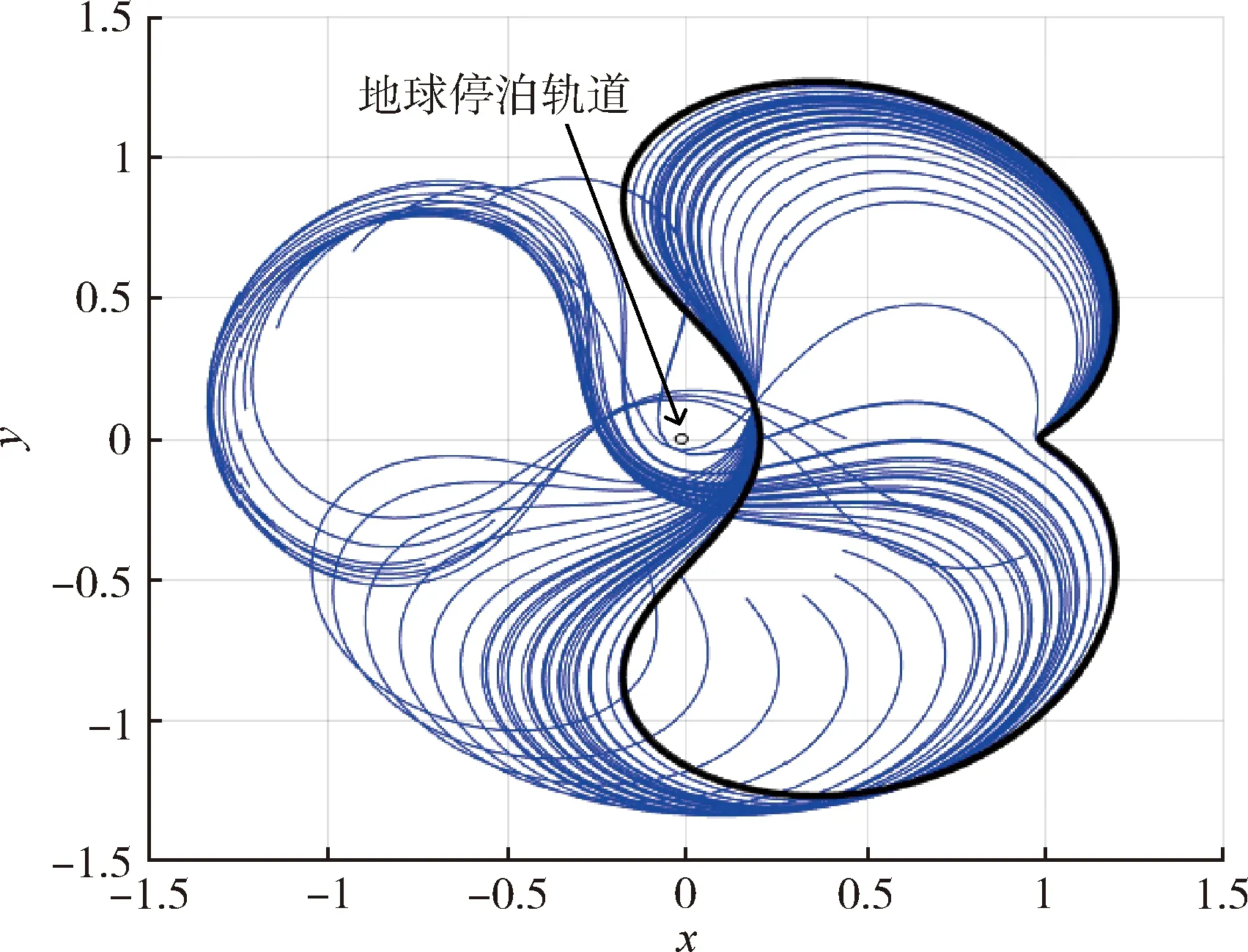
图2 大幅值Lyapunov轨道的稳定流形
对于Lyapunov轨道的稳定流形,小偏差量ε的大小会影响稳定流形在轨道周围运行的时间。图3为以Xd+εed为初始状态,通过不同偏差值反向时间积分20个单位时间的稳定流形的正分支。当ε=10-6时,稳定流形在Lyapunov轨道周围运行大约3个周期;当ε=10-5和ε=10-4时,稳定流形在Lyapunov轨道周围运行大约2个周期后流向地球;当ε=10-3、ε=10-2和ε=10-1时,稳定流形在Lyapunov轨道周围运行大约1个周期后流向地球。由此可见:ε越大,稳定流形受到Lyapunov轨道吸引而在其周围运行的时间越短。

图3 不同偏差值对应的稳定流形流向地球方向的分支
2 轨道设计方法
在地月CRTBP下,由于共线平动点L1点处于地球和月球之间,L1点的Lyapunov轨道必然会存在一条反向时间积分流向地球区域的稳定流形和一条正向时间积分流向月球区域的不稳定流形。不变流形可以用来实现地月转移,探测器处于不变流形上可不耗能地靠近或者远离Lyapunov轨道。但是,不变流形无论是靠近还是离开平动点周期轨道,都会在接近周期轨道时飞行数圈且永远不能到达这个轨道。一方面,平动点周期轨道与不变流形之间渐近过程增加了轨道转移所需要的时间;另一方面,现有方法通常忽略了周期轨道与不变流形之间的过渡,所设计出的转移轨道并非一条完整连续的轨道,且未将过渡时所需的能耗考虑在内。
本文设计了一种基于L1点大幅值Lyapunov轨道的地月转移方法。该方法通过一条流向地球方向的稳定流形直接连接近地轨道与近月轨道,轨道在地球和月球附近的终止条件通过最近点截面来实现。
2.1 最近点截面
在地月轨道转移过程中,保证转移过程中能耗尽可能低的条件是:探测器离开地球停泊轨道时通过一个切向脉冲使其速度增大,进入月球停泊轨道时再通过一个切向脉冲使其速度减小。轨道转移的过程通常通过庞加莱截面实现,但是传统的庞加莱截面(以x轴为截面)并不能保证探测器的切向加速或者减速,所以本节引入最近最远点截面来设计地月低能转移轨道。


(11)

(12)
表明相对于地球的位置向量垂直于速度向量,即
r·v=0
(13)
根据CRTBP动力学方程,如果轨道在t时刻满足式(13)时,当满足条件
(r·v)t-<0,(r·v)t=0,(r·v)t+>0
(14)
时,该点为近地点;当满足条件
(r·v)t->0,(r·v)t=0,(r·v)t+<0
(15)
时,该点为远地点。最近最远点截面图通常以探测器轨道在质心旋转坐标系中的位置向量[x,y]作为投影点坐标,由此可以确定轨道相对于地心的位置向量[x+μ,y],而轨道的速度向量垂直于其相对于地心的位置向量。
最近点截面通常称为近拱点庞加莱截面,可用来设计大幅值Lyapunov轨道的稳定流形与地球停泊轨道之间的拼接。当稳定流形在以地球为中心的近拱点庞加莱截面图上的投影点刚好落在地球停泊轨道上时,则通过投影点位置可以施加切向脉冲。然而,需要注意的是:单从近拱点庞加莱截面图上的投影点判断,每一个投影点都可以代表两个互相相反的方向。在图4中,投影点a1对应的轨道与地球停泊轨道速度方向相同,则探测器离开圆轨道所需要的脉冲值最小,为v1-vE;投影点a2对应的轨道与地球停泊轨道速度方向相反,则探测器离开圆轨道所需要的脉冲值最大,为v2+vE。所以,当探测器在地球停泊轨道上运行时,对其施加一个脉冲,能够使其离开该轨道。如果施加脉冲后系统的雅可比常数固定,那么脉冲值最小的充要条件是:所施加的脉冲为切向速度脉冲且与地球停泊轨道运行方向相同。

图4 最近点截面图的脉冲关系
2.2 地月转移轨道设计
在地月轨道转移根据本文1.2节的内容,可知初始状态为Xd的L1点大幅值Lyapunov轨道与高度为100 km的月球停泊轨道相切,并且其稳定流形能够到达地球附近。所以,利用初始状态为Xd的L1点大幅值Lyapunov轨道能够实现地月轨道转移。然而,探测器在稳定流形上运动时永远不能到达Lyapunov轨道。当偏差值设置较小时,稳定流形会围绕Lyapunov轨道运行数圈,增加了转移时间;当偏差值设置较大时,稳定流形能够较快地离开Lyapunov轨道,但稳定流形初始点也会距离Lyapunov轨道较远,为转移轨道的设计增加了难度。图5为以Xd为初始状态的Lyapunov轨道取的情况下得到的流向地球方向的稳定流形。可以看出:Xd与稳定流形的初始点Xd+εed之间存在一定的偏差,距离大约为73 km。
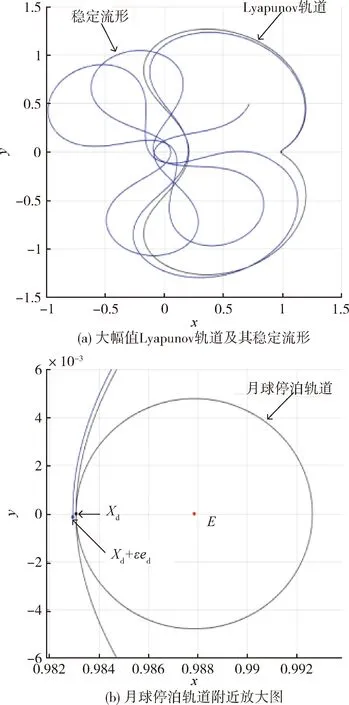
图5 Lyapunov轨道与稳定流形之间的偏差

Xs=X0+εes
(16)
由于X0与Xd非常接近,则es与ed近似,所以有:
(17)
根据式(12),如果近拱点庞加莱截面以月心为中心,则有:

(18)
(19)
在预先设置取值范围的情况下,由于es与ed较为接近,则可以预估Δx的取值范围并进一步得到x0的取值范围。在x0的取值范围内,选择x0并计算以x0为初始点的大幅值Lyapunov轨道,然后根据式(19)计算ε的值,可反向时间积分得到相应的稳定流形。
通过本文方法设计地月低能转移轨道的流程如图6所示。预先设置ε的取值范围,预估Δx的取值范围并进一步得到x0的取值范围;选定x0的值并计算以x0为初始点的大幅值Lyapunov轨道,根据式(19)计算ε的值,得到相应的稳定流形;当稳定流形在以地心为中心的近拱点庞加莱截面图上的投影点落在近地轨道上时,探测器能够在该点实现从地球停泊轨道向稳定流形的切向过渡,否则重新设置x0的值;通过稳定流形在以月心为中心的近拱点庞加莱截面图上的投影确定从稳定流形进入近月轨道的切点,计算这个近月轨道半径得到月球停泊轨道,得到了一条完整的地月转移轨道。
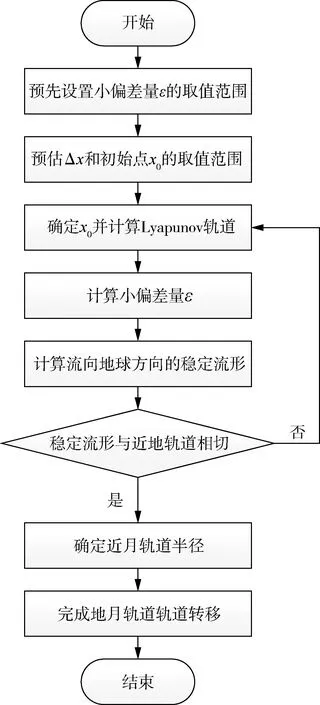
图6 转移轨道设计方法
3 数值仿真分析
在地月CRTBP中,选择地球停泊轨道距离地球表面的距离为167 km,月球停泊轨道距离月球表面的距离为100 km,本文以Xd为初始值的大幅值Lyapunov轨道为参考轨道设计地月低能转移轨道。
通过图3可知:当ε取值为10-6,10-5和10-4时,稳定流形在Lyapunov轨道周围运行至少2周,导致地月转移时间过长;当ε取值为10-3和10-2时,稳定流形仅在Lyapunov轨道周围运行1周,且随着ε增大,稳定流形逐渐接近地球;当ε取值为10-1时,尽管稳定流形在Lyapunov轨道周围运行1周,但距离地球较远。因此,预先设置ε的取值范围为[10-3,10-2],预估Δx∈[2.6×10-6,2.6×10-5],可确定x0的取值范围。根据图6中轨道设计流程,图7为所得到的最短时间的地月转移轨道,其对应的大幅值Lyapunov轨道的初始状态为:

图7 通过稳定流形得到的地月转移轨道
X0=[0.983079,0,0,-2.36246]T
(20)
相应的稳定特征向量为:
es=[-0.00262780,-0.00274259,
0.804571,0.593845]T
(21)
与之对应的ε=0.00415310,通过X0和ε可以得到稳定流形的初始状态并反向时间积分得到Lyapunov轨道流向地球方向的稳定流形。这个稳定流形在以地心为中心的近拱点庞加莱截面图上的投影点落在距离地球表面距离为167 km的地球停泊轨道上。所以,这个点对应地球停泊轨道的分离点,使得探测器能够从地球停泊轨道通过切向速度脉冲进入Lyapunov轨道流向地球方向的稳定流形。另外,需要找到稳定流形在以月心为中心的近拱点庞加莱截面图上投影,而这个投影点可以定为月球停泊轨道的进入点。需要注意的是,通过投影点确定的月球停泊轨道会与理想轨道(距离月球表面100 km)存在一定的偏差,但这个偏差通常非常小。在图7中,探测器最终进入的月球停泊轨道与月球表面的距离为100.018 km,与理想轨道仅存在0.018 km差距。探测器从雅可比常数为CE=58.3021的地球停泊轨道出发,通过一个切向脉冲Δv1=3131.6 km/s进入转移轨道,转移轨道的雅可比常数为C=2.46437,而探测器到达绕月轨道的雅可比常数为CM=5.50799,需要一个切向脉冲Δv2=789.1 km/s进入月球停泊轨道。整个地月转移过程所需要的总能耗为Δv=3920.7 km/s,转移轨道所需要的总时间为62 d。
表1为本文方法与现有方法所得到的地月转移轨道的参数对比。传统的霍曼转移方法所需要的能耗为3994.8 km/s,飞行时间为5.1 d。与霍曼转移方法相比,本文方法尽管需要更长的飞行时间,但却能够节约能量消耗。同样基于大幅值Lyapunov轨道不变流形方法[13]的地月轨道转移需要的总能耗为Δv=3890.2 km/s,飞行时间至少为95.8 d。与文献[13]相比,本文方法减少了稳定流形渐近Lyapunov轨道时所需的飞行时间和脉冲次数。与现有的基于Lyapunov轨道的地月转移方法不同,本文方法利用Lyapunov轨道流向地球方向的稳定流形直接将地球停泊轨道与月球停泊轨道连接进而实现地月转移。优点是:在飞行时间方面,转移轨道始终处于地月系统内,且不用通过渐近Lyapunov轨道来实现转移,转移时间较短;在能耗方面,转移轨道为不耗能的稳定流形,探测器通过最近点截面实现地球停泊轨道的切向逃逸和月球停泊轨道的切向进入,尽可能地减少了转移能耗;在所需脉冲方面,仅需要最少的2次脉冲即可实现地月转移。

表1 地月转移过程中所需的速度增量和飞行时间
4 结论
利用L1点大幅值Lyapunov轨道的稳定流形直接将近地轨道和近月轨道切向连接来实现地月低能转移。相比霍曼转移,该方法所得到的转移轨道具有更少的能量消耗;相比其它基于Lyapunov轨道的地月转移轨道设计方法,该方法省去了与不变流形的拼接和探测器渐近Lyapunov轨道的时间,节省了轨道转移时间和脉冲次数。
猜你喜欢
军事文摘(2022年12期)2022-07-13
飞碟探索(2022年1期)2022-03-12
军事文摘(2021年18期)2021-12-02
数学物理学报(2021年1期)2021-03-29
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
数学物理学报(2020年2期)2020-06-02
数学年刊A辑(中文版)(2019年3期)2019-10-08
学生天地·小学低年级版(2019年5期)2019-06-05
学生天地(2019年15期)2019-05-05
数学物理学报(2019年1期)2019-03-21
