基于STM32 的柱塞气举运动状态监测系统
2023-11-14 12:04肖红翼罗仁宏张海龙
现代制造技术与装备 2023年9期
肖红翼 罗仁宏 张海龙
(1.长江大学 电子信息学院,荆州 434023;2.武汉商贸职业学院 现代工业技术学院,武汉 430000;3.上海科学技术职业学院 智能制造工程学院,上海 201899)
柱塞气举作为重要的人工举升方式,在油气田开采中应用十分广泛[1-2]。柱塞上行速度和到达井口的状态与柱塞气举工作制度密切相关,直接影响柱塞气举的举升效率。现有的柱塞气举运动状态监测系统存在功能单一、成本高等问题,且多以地磁检测手段为主。地磁检测传感器的成本高,需要分析不同轴向的地磁变化,数据处理难度大。为了克服现有技术的不足,设计了一种柱塞运动状态监测系统,以微型处理器STM32 为核心,基于法拉第电磁感应定律产生柱塞运动与到达信号,经过设计的滤波整形电路后,由STM32 进行采集,并通过Modbus RTU 协议将柱塞运动状态远程传输至上位机。系统简化了外围电路,具有功耗极低、运动状态便于观测与记录、柱塞气举的举升效率高的优点。
1 柱塞运动状态监测系统组成
当一块磁铁从某一高度落下,通过外部绕有线圈的圆柱体时,会使线圈产生感应电动势,与之相连的电路将获得磁铁经过线圈的信号,依据这一原理进行柱塞运动状态检测[3]。通过在油管上缠绕线圈将磁铁固定在柱塞上,当柱塞经过线圈时,线圈上将产生感应电动势。利用设计的滤波与放大电路,放大该感应电动势信号以获得表征柱塞经过线圈时的开关量信号。该信号经过STM32 微处理器运算处理后,得到柱塞运动速度与到达信号。
柱塞气举运动状态监测系统框图如图1 所示。将配有磁铁的柱塞放置在油管底部,油管上缠绕3 个测速线圈和1 个到达线圈。当含有磁铁的柱塞运动到线圈位置时,线圈上将产生感应电动势。通过滤波电路滤除干扰信号后,将感应电动势信号整形与放大,获得表征柱塞运动到线圈位置的开关量信号。系列开关量信号触发STM32 定时器,从而获得柱塞运动速度与到达状态。STM32 通过Modbus RTU 协议将柱塞运动状态参数发往上位机进行显示。电源提供5 V 和±3.3 V 电压。
2 柱塞运动参数检测原理
将线圈紧贴在钢管(油管)上,当柱塞运动至线圈位置时,传感器输出高电平信号。当柱塞未运动到传感器位置时,传感器输出低电平信号。将4 个柱塞运动参数检测传感器安装在钢管上,其中下面3 个传感器用来检测柱塞运动速度,最上面靠近井口的传感器用来检测柱塞到达标志。在已知传感器安装距离的基础上,通过捕获每2 个传感器输出高电平的时间差,由速度v、距离l与时间t关系式v=l/t可求得速度。
3 系统设计
3.1 硬件设计
带有磁铁的柱塞经过线圈时将产生感应电动势,但该电压很低且带有杂波信号,为了便于微处理器判断,需要对该感应电势进行信号处理[4]。滤波电路采用电阻-电容(Resistor-Capacitance,RC)滤波,滤除电压信号中的低频干扰信号。硬件电路中设计有二级放大,其中:一级是通过仪表放大器对共模信号进行抑制的同时,将感应电势放大,所选仪表放大器为INA128,电路设计放大倍数为40;二级是采用运算放大器放大第一级的输出,选用TI 公司的OPA2350 运算放大器。
该芯片内置有2 个放大器,电路设计中一个用作普通放大,放大倍数设计为8.5。另一个设计为比较器,电路中比较基准电压为1.66 V,即将柱塞经过线圈产生的感应电势经滤波放大后与1.66 V 进行比较。当大于该基准电压时,OPA2350 输出高电平信号;当低于该基准电压时,OPA2350 输出低电平信号,经过硬件电路的处理后将柱塞经过线圈产生的感应电势通过开关量呈现出来。滤波与整形电路,如图2 所示。
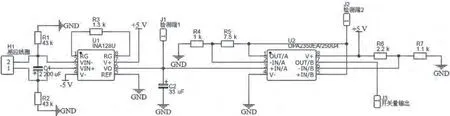
图2 滤波与整形电路
将柱塞运动参数检测传感器的输出端与STM32微处理器相连接,由STM32 进行采集与处理。STM32在输入端的硬件上通过PC7、PC6、PB8 这3 个通用输入/输出(General-Purpose Input/Output,GPIO)端口与传感器输出相连接,用以捕捉开关量信号。STM32 的串口与232-485 芯片相连接,实现232 V到485 V 的转换。数据格式上采用Modbus RTU 协议与工控机进行数据交互。
3.2 软件设计
通过系统硬件电路实现了感应电动势到开关量的转换,软件部分主要根据柱塞运动参数检测原理进行柱塞运动速度计算、到达时间计算以及数据的远程上传,在工控机端查看柱塞运动参数[5]。当STM32 检测到1 号线圈输出的高电平信号时,开启定时器1。当STM32 检测到2 号线圈输出的高电平信号时,关闭定时器1,读取时间t1,并开启定时器2。当STM32 检测到3 号线圈输出高电平信号时,关闭定时器2,读取时间t2。STM32 获取时间序列数据后,计算得到速度,然后将速度值存入Modbus 寄存器下的缓冲区,实现向工控机的数据转发。当执行开井操作后,STM32 控制定时器3 开始计时。STM32 检测到到达线圈输出高电平时,读取定时器3 的计数值,并关闭定时器3,即可获得柱塞到达时间,同时将该值存入Modbus 寄存器。
4 实验
本实验在中石油气举实验基地多相流实验平台和气井动态模拟实验装置中进行。实验平台能进行油、气、水等多种流体实验,在0 ~90°倾角、常温至90 ℃、常压至3.5 MPa、液流量0 ~500 m3·d-1、流体黏度0 ~1 000 mPa·s、 气流量0 ~50 000 m3·d-1的条件下开展多相流动态研究。为了分析不同柱塞在0 ~90°倾角的运动特性,测试不同倾角条件、不同压强条件下柱塞的运动速度。
实验步骤:打开出口阀释放管内残余气体;当油管压强达到0 MPa、套管压强达到10 kPa 时,打开入口阀以小气量进气,其中气动阀开度在3%;当套管压强为30 ~40 kPa 时,关闭出口阀,打开进液阀和入口阀,同时进气液;当液段达到目标高度时,关闭液泵停止供液,静置等待压强稳定;待压强稳定后,打开出口阀;当监测系统检测到柱塞到达时,关闭出口阀。该实验研究了不同井底压强、不同倾角下柱塞运动状态的相关参数采集。柱塞运动状态监测数据,如表1 所示。
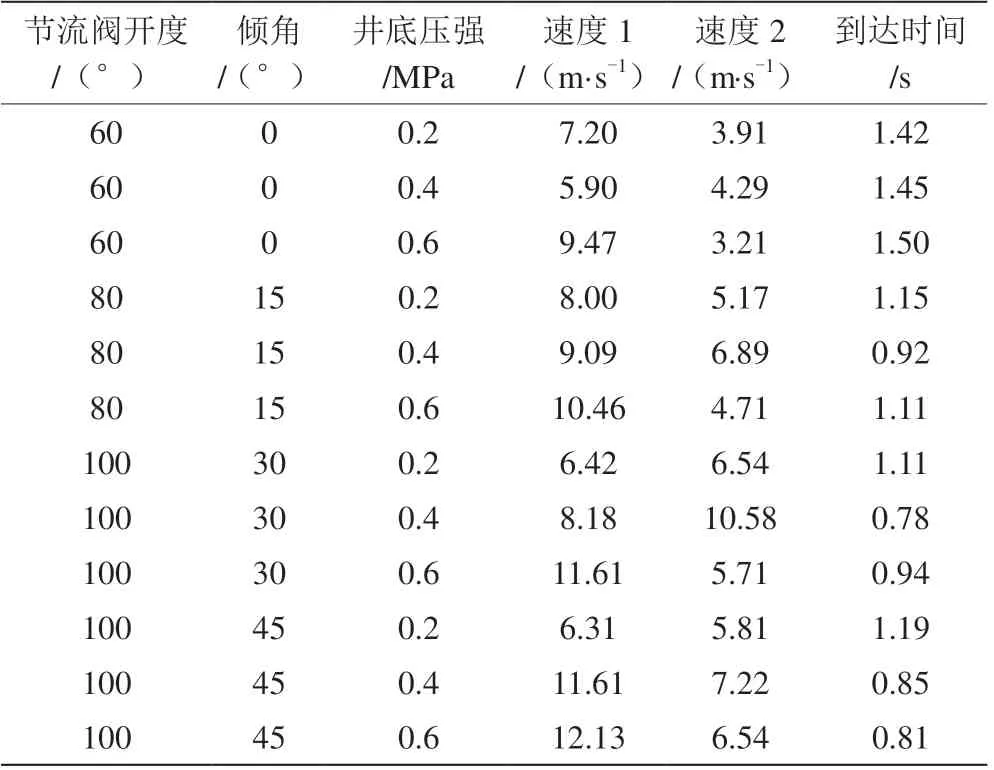
表1 柱塞运动状态监测数据
表中,速度1 表示柱塞从1 号线圈到达2 号线圈的快慢程度,速度2 表示柱塞从2 号线圈到达3 号线圈的快慢程度。测试结果表明,在不同工况下,本次设计的状态监测系统能有效检测柱塞运动状态,可精确测量柱塞运动速度,准确捕捉柱塞到达状态。基于STM32 的柱塞气举运动状态监测系统为后续开展柱塞气举物理模拟实验研究,进一步探索柱塞气举的举升效率问题提供了有力支撑。
5 结语
柱塞气举研究多采用软件模拟的方法,缺乏实际柱塞运动数据的支撑。提高柱塞气举的举升效率,良好控制柱塞运行的前提条件是对柱塞运动状态进行监测。因此,设计了基于STM32 微处理器的柱塞气举运动状态监测系统,以法拉第电磁感应定律为理论基础,结合设计的滤波与整形电路实现了感应电势到开关量的转换,便于STM32 微处理器进行捕捉。柱塞运动时经过感应线圈产生开关量信号,触发STM32外部中断,从而检测柱塞运动速度与到达井口的状态,并在工控机端显示柱塞运动参数。实验模拟了柱塞气举工作环境,完成了柱塞气举运动状态监测,验证了基于STM32 的柱塞气举运动状态监测系统的有效性与实时性,为后续开展柱塞气举漏失量、柱塞运动速度与摩擦系数关系研究提供了较好的硬件支持。
猜你喜欢
机械工程与自动化(2022年3期)2022-06-24
山西电子技术(2022年1期)2022-02-28
云南化工(2021年10期)2021-12-21
海洋石油(2021年3期)2021-11-05
装备制造技术(2020年11期)2021-01-26
石油钻探技术(2020年3期)2020-08-24
钻采工艺(2020年1期)2020-07-21
科技传播(2019年15期)2019-08-22
数字传媒研究(2017年11期)2017-02-05
西部广播电视(2016年16期)2016-11-09