基于改进模糊AHP的风电场有功功率分配方法
2023-11-14 13:28贾梦欣张彬彬陈超波李继超
能源与环保 2023年10期
贾梦欣,张彬彬,陈超波,王 坤,李继超
(西安工业大学 电子信息工程学院,陕西 西安 710021)
化石能源日益减少及其带来的环境污染,是当前世界面临的诸多问题之一。大力发展风电产业,提高风力发电技术水平,是解决该问题的有效途径。由于风能的波动性和间歇性,并网风电场影响电网安全稳定运行。相关国家标准要求并网风电场功率输出服从电网调度中心调度[1]。
风电场有功功率分配中心接收电网调度中心有功功率调度指令,并按照一定的算法分配给每台风电机组。目前工程上,有功功率分配算法多采用按风速权重分配算法[2]。但是该分配算法未考虑机组载荷、频繁启停等问题,目前围绕风电场有功功率分配优化已成为风电场有功功率控制的研究热点。文献[3]建立基于马尔科夫链的风电场机组功率预测模型,根据预测的机组功率,完成风电场功率分配。文献[4]基于随机线性化方法,将风电机组非线性模型等效为线性仿射模型,将风电场功率分配模型等效为求解多维无约束的线性优化问题。但是文献[3-4]依赖风电场的预测风速,目前预测风速的平均绝对误差为3.89%[5],基于风速预测的风电场有功功率分配算法可能会导致机组功率给定不准确。同时以上功率分配算法均未考虑机组的运行状态,导致机组执行机构频繁动作。文献[6]提出基于电池储能的风电场有功功率分配算法。但是电池储能系统将会大大增加风电场的成本。针对部分功率分配算法未考虑机组运行状态的缺点,文献[7]提出了考虑风电机组载荷的风电场有功功率优化分配算法,该算法满足有功功率控制的要求,同时减少机组的疲劳载荷。文献[8]采用多目标优化算法完成风电场功率分配,仿真结果说明所提算法的优越性。文献[9]提出基于多智能体技术的风电场有功功率分配策略,可有效降低疲劳载荷。但是文献[7-9]风电场有功功率分配算法依赖机组的精确数学模型,同时随着机组个数的增多,智能优化算法、预测控制算法等方法存在“维度灾难”和局部收敛的缺点。
综上所述,由于生产误差、安装误差、器件老化等影响,风电机组的数学模型存在非线性、高阶、不确定性等特点[10],以及风速难以预测的特性。文献[11]提出了一种基于模糊评价的风电场有功功率分配算法,根据机组的风速、转速和桨距角数据,采用分层模糊推理算法评价机组的功率调节能力,用于风电场有功功率分配。但是实际应用中仍存在模糊参数较多的缺点。考虑AHP方法在解决大规模非结构化决策问题上具有简洁性。目前已广泛采用AHP方法应用于风电场选址[12]和配电网停电评估[13]等项目。
文中针对模糊评价风电场有功功率分配中,采用二型模糊推理机,存在模糊参数较多的问题,在分析风电机组限功率运行特性的基础上,提出了基于模糊AHP评价风电机组发电能力的算法,用于风电场有功功率分配。在MATLAB仿真平台上验证文中所提算法,并与模糊评价风电场有功功率分配算法相比,说明文中算法的有效性和可行性。
1 风电机组限功率运行分析
目前变速变桨机组作为主流风电机组,其数学模型[14]为:
(1)
式中,Pm为风电机组机械功率;ρ为空气密度;R为叶轮半径;CP为桨距角β和叶尖速比λ的函数;v为风速;Tm为机械转矩;ω为风力机角速度;J为机组等效转动惯量;Te为电磁转矩。
由式(1)可知,风电机组主要通过调节桨距角或转速,改变叶轮捕获的风能。当风电机组最大输出功率超出其有功功率给定时,风电机组进入限功率运行模式。考虑不同风速下机组变速系统和变桨系统的参与功率调节程度不同,风电机组限功率可分为:变桨限功率控制、变速限功率控制和变速变桨联合限功率控制。
某风电机组在风速8 m/s时,不同桨距角的转速功率曲线如图1所示。图1中,β1=0,且β1—β5依次增大,Popt是风电机组在不同桨距角下最优功率曲线。假设机组当前工作在A点,此时机组的功率为最大功率Pmax。当风电机组的有功功率指令为Pset1时,有3种不同限功率控制策略。
(1)变桨限功率控制。仅改变桨距角,保持机组转速为最优转速,机组的运行轨迹为A-B1段。
(2)变速限功率控制。提高转速,保持桨距角不变,机组的运行轨迹为A-B段。
(3)变速变桨联合限功率控制。联合调节转速和桨距角,使机组工作在A至B-B1点之间。
当机组限功率运行时,机组具有升功率调节能力和降功率调节能力。由式(1)可知。机组功率调节能力与风速的立方线性相关,并且由图1可知,机组桨距角越大,当前转速与最优转速相差越大,机组升功率能力越强。同时升功率能力和降功率能力互补。故机组的功率调节能力如式(2)所示。
(2)
式中,ΔPup为机组升功率调节能力;ΔPdown为机组降功率调节能力;ω为机组转速;ωopt为机组最优转速;ωmax为机组允许的最大转速;β为机组的当前桨距角;βmin为机组正常运行的最小桨距角,通常为0;βmax为机组正常运行的最大桨距角;k1和k2为变速系统和变桨系统的相对权重系数;且满足k1+k2=1,Pmax(v)为机组的最大输出功率,它与风速v的立方有关,其表达式如式(3)所示[15]。
(3)
式中,PN为机组的额定功率;vN、vci和vco分别为额定风速、切入风速和切出风速。
2 基于模糊AHP的机组功率调节能力评价方法
文献[11]对3个限功率区的机组功率调节能力进行模糊评价,并再次通过模糊推理得到机组的功率调节能力。它的模糊推理机共计需要14个模糊参数,实际应用中仍存在参数选取困难的问题。在机组功率调节中,主要是变速系统和变桨系统参与机组功率控制,风速大小不同,两者参与功率调节的程度不同,结合式(2),可采用AHP方法评价机组的相对权重系数,减少模糊推理的参数。
文中以AHP方法为理论基础,确定变速系统和变桨系统参与风电机组限功率运行的相对权重系数。实际运行过程中,不同限功率运行区的区域划分是模糊的,可利用TS(Takagi-Sugeno) 模糊模型以系统局部线性为基础,基于模糊推理实现系统的全局非线性的特点,结合模糊理论和AHP方法,评价风电机组的功率调节能力。
2.1 AHP方法
AHP方法将复杂的问题分解成各个组成因素,又将这些因素按支配关系分组形成递阶层次结构。基于实际经验和系统运行特性,通过两两比较的方式确定层次中诸因素的相对重要性。然后综合计算各个因素对总体目标的权重,为最优方案提供基础[16]。
AHP方法关键是确定判断矩阵。判断矩阵元素的重要性标度见表1。可根据各个元素的相对重要程度,确定判断矩阵元素的数值。根据判断矩阵计算各因素权重,权重计算方法采用求和法,求和法见式(4)。
(4)
式中,n为判断矩阵的维数;aij是判断矩阵的元素。由式(4)可知,各因素权重的求取步骤为:按列归一化判断矩阵的元素;然后各列元素相加;除以n即得权重向量。
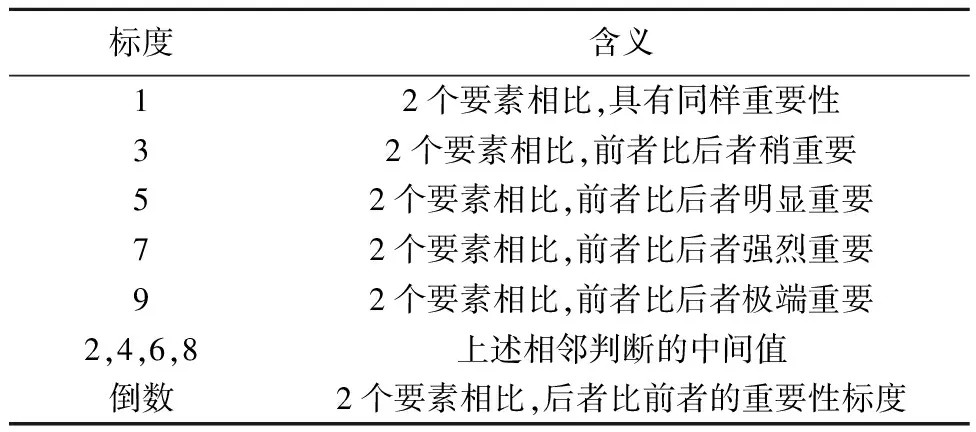
表1 判断矩阵标度定义Tab.1 Definition of judgment matrix scale
2.2 TS模糊模型
TS模糊模型一般应用于非线性模型的近似,在工业控制领域、系统辨识等场合,具有广泛的应用。TS模糊模型的第i条规则表达式为:
Ri:IFx1isAi,and…,xnisAn
THEN:yi=fi
(5)
其中,x1,…,xn为输入变量;A1,…,An为论域;yi=fi为输出函数。
经过模糊推理,模糊模型的输出如式(6)所示,wi为第i条规则的隶属度。
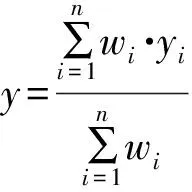
(6)
2.3 模糊AHP评价机组功率调节能力
由图1和式(2)可知,评价机组功率调节能力的关键是确定变速系统和变桨系统的相对权重系数。相对权重系数的判断矩阵A为:
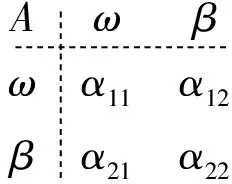
(7)
变速限功率运行时,风电机组输出功率主要由变速系统调节,认为风电机组的变速系统比变桨系统极端重要,则变速限功率区的判断矩阵A1为:
(8)
在变速变桨限功率运行中,风电机组输出功率由变速系统和变桨系统共同调节,认为两者一样重要,则变速变桨联合限功率区的判断矩阵A2为:
(9)
在变桨限功率运行中,风电机组的功率输出主要由变桨系统调节,认为变桨系统比变速系统极端重要,则变桨限功率的判断矩阵A3为:
(10)
采用式(4)求取变速系统和变桨系统的权重系数,3种限功率运行区的相对权重系数见表2。
表2 三个限功率运行区的权重向量
Tab.2 Weight vectors of three curtailmentpower operating zones
同时受机组安全运行限制,无论机组采用任何功率控制策略,通常风速越大,变速系统参与功率调节的程度越弱,变桨系统参与功率调节的程度越强。针对变速系统和变桨系统参与功率调节的程度的不确定性和机组数学模型的非线性,文中采用TS模糊模型评价机组功率调节能力。TS模糊模型的输入为风速,输出为机组变速系统相对权重系数,其中输入变量的隶属度函数如图2所示,隶属度函数选择较为容易实现的梯形隶属度函数。L为变速限功率运行区,M为变速变桨综合限功率运行区,B为变桨限功率运行区。v01、v02、v03和v04为模糊函数的隶属度函数参数,v01可认为是机组切入风速,v04为额定风速,v02和v03需根据变速系统和变桨系统参与功率调节程度确定。与模糊评价法相比,文中只需要v02和v03两个参数,大大减少模糊推理机的参数数量,同时可媲美模糊评价的控制效果。
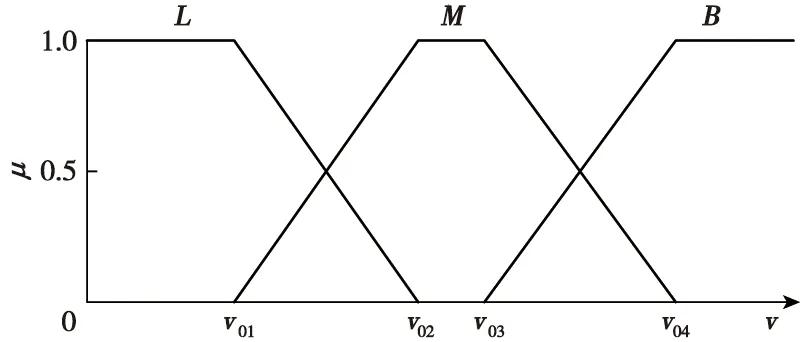
图2 三个限功率运行区隶属度函数Fig.2 Membership function of three curtailment power operating zones
则风电机组限功率运行时,结合式(6),变速系统相对权重系数η为如式(11)所示。

(11)
式中,μ(L)、μ(M)和μ(B)分别为变速限功率、变速变桨联合限功率和变桨限功率隶属度;kL1、kM1和kB1分别为3个限功率运行区的变速系统相对权重系数,具体数值见表2。
变桨系统相对权重系数为1-η,结合式(2),则机组的功率调节能力如式(12)所示。
(12)
3 基于机组功率调节的风电场有功功率分配
结合第2节,采用模糊AHP方法可得第i台机组的升功率调节能力ΔPup,i和降功率调节能力ΔPdown,i,可用于风电场有功功率分配。基于模糊AHP风电场有功功率分配算法如图3所示。风电场有功功率分配器接收电网调度指令Pcmd,同时与风电场实际功率输出Pout相比,得到功率偏差ΔPfarm。如果风电场功率偏差ΔPfarm大于0,则每台机组提高功率输出,则第i台机组的功率给定变化ΔPset,i如式(13)所示;如果风电场功率偏差ΔPfarm小于0,则每机组降低功率输出,第i台机组的功率给定变化ΔPset,i如式(14)所示。
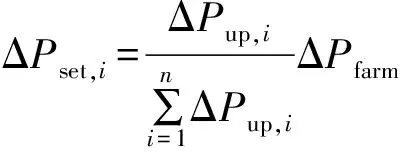
(13)
(14)

图3 模糊AHP的风电场有功功率分配示意Fig.3 The wind farm active power dispatching schematic of the fuzzy AHP
4 仿真验证
文中以某风电场为研究对象,该风电场有30台风电机组,假设所有机组运行状况良好,同时不考虑机组之间的尾流效应。机组的相关参数[14]见表3,建立机组的单质量体仿真模型,风电机组的有功功率控制算法选择文献[17]提出的变速变桨联合限功率控制策略。
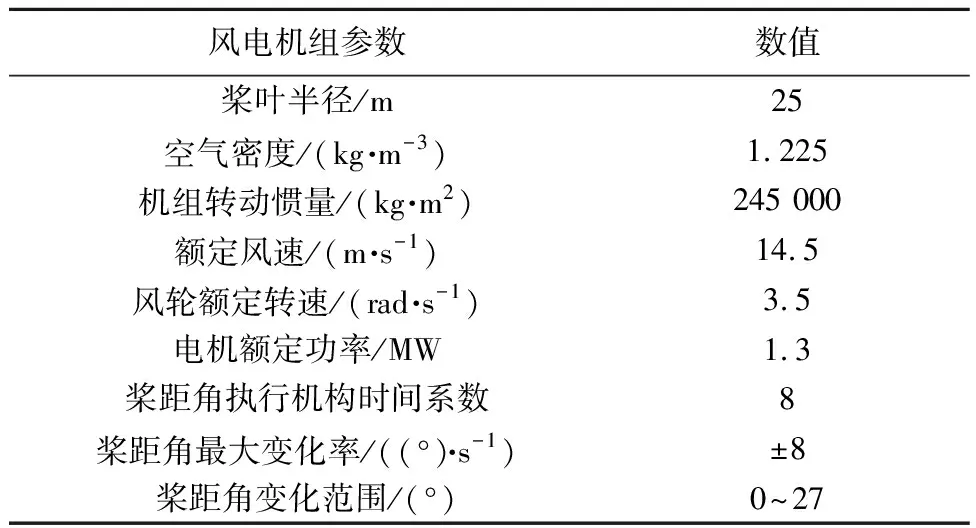
表3 风电机组参数Tab.3 The parameters of wind turbine
在MATLAB仿真平台上完成机组限功率控制,根据机组参数和机组运行结果,结合相关工程经验,可知v01=3 m/s,v02=7 m/s,v03=11.5 m/s,v04=13.5 m/s。
假设30台机组运行状态良好,且不考虑风电场尾流。为体现风电场风速多样性,假设平均风速在3~14 m/s均匀分布,且风速由基本风、阵风、渐变风和随机风组成。机组编号被3整除的10台机组风速曲线如图4所示。当风电场有功功率指令大于风电场最大功率时,所有机组为MPPT(Maximum Power Point Tracking)控制。文中侧重研究有功功率指令小于风电场最大功率的情况。
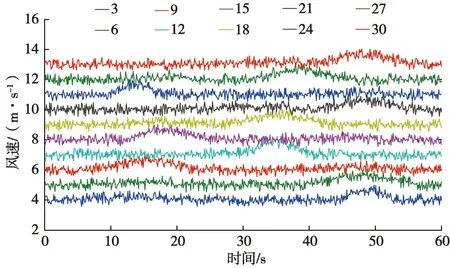
图4 10台风电机组的风速Fig.4 The wind speed of 10 wind turbines
假设风电场所有机组初始转速为1 rad/s,初始桨距角为0,风电场的有功功率分配周期为5 s。在CPU为Core(TM)i7-4790、内存为8 GB的计算机和MATLAB2014环境下,文中算法的执行时间为1.36 ms,文中算法满足实际工程实时控制要求。
假设风电场有功功率调度指令为12 MW,则模糊评价有功功率分配算法和文中算法的风电场有功功率输出如图5所示。7 s后2种功率分配算法的功率输出达到电网调度指令要求。采用误差绝对积分(IAE)指标评价2种算法的跟踪效果,文中算法的IAE指标为40 678 639,而模糊评价分配算法的IAE指标为40 849 257,说明文中算法的跟踪效果好、跟踪精度高。
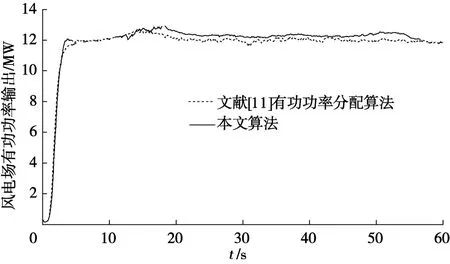
图5 两种分配算法风电场有功功率输出Fig.5 The wind farm active power curves of the two dispatching algorithms
参考文献[14]定义的功率平滑度,风电场的输出功率平滑度见式(15)。则模糊评价风电场有功功率分配算法的功率平滑度31 474,文中算法的功率平滑度为26 630,说明文中算法的有功功率波动较小。
(15)
参考文献[11],定义机组的转速平滑度函数见式(16)。转速平滑度越低,机组的轴系负荷就越小。定义桨距角的行程见式(17),βi为第i台机组的桨距角。风电场桨距角行程越小,变桨系统的疲劳载荷就越低。
(16)
(17)
假设风电场功率给定为12~13 MW,则2种风电场有功功率分配算法的IAE指标、功率平滑度、桨距角行程和转速平滑度如图6—图9所示。对比可知,模糊AHP风电场有功功率分配算法的有功功率输出较为稳定,功率输出较为平滑,同时有效降低桨距角频繁调节。但是模糊评价风电场有功分配算法的转速平滑度优于文中算法。通常变桨系统存在成本高、维修时间长的缺点。从降低维修成本方面考虑,文中算法的控制效果优于模糊评价风电场有功功率分配算法。

图6 两种功率分配算法的风电场IAE指标Fig.6 The wind farm IAE index of two power dispatching algorithm
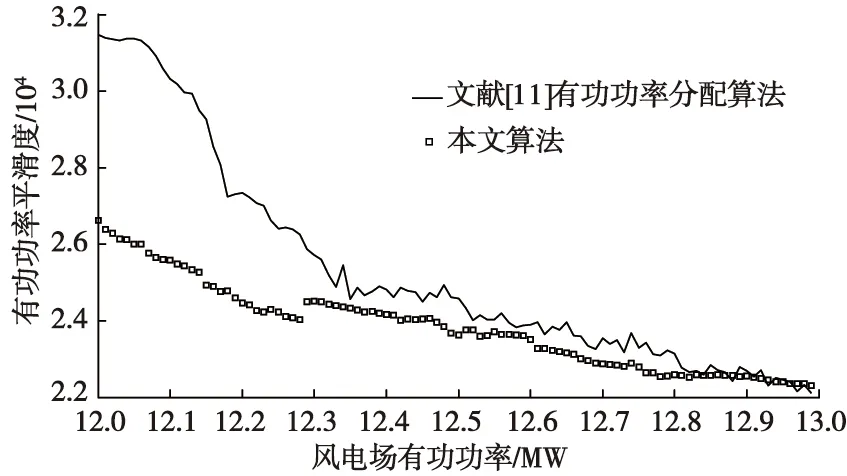
图7 两种功率分配算法的风电场功率平滑度Fig.7 The wind farm power smoothness of two power dispatching algorithm

图8 两种功率分配算法的风电场桨距角行程Fig.8 The wind farm pitch angle route of two power dispatching algorithm
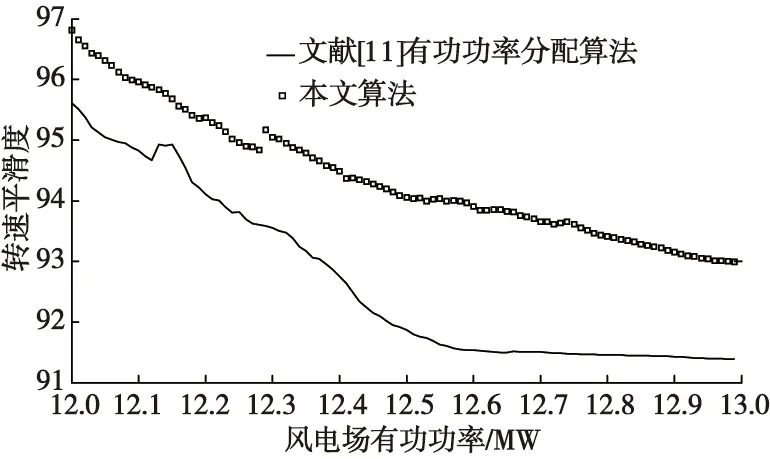
图9 两种功率分配算法的风电场转速平滑度Fig.9 The wind farm speed smoothness two power dispatching algorithm
5 结论
针对模糊评价有功功率分配算法,采用二型模糊推理机,模糊参数较多问题。文中提出了基于模糊AHP的风电场有功功率分配算法。该算法采用AHP法评价变速系统和变桨系统参与功率调节的相对权重系数,最终通过TS模糊模型评价机组的功率调节能力。文中的模糊模型仅需调节2个模糊参数,有效的克服模糊评价有功功率分配算法模糊参数较多的问题。
实验结果表明该算法在保证风电场服从功率调度要求,同时风电场功率输出波动小、桨距角行程小。说明模糊AHP方法评价机组功率调节能力更加合理,分配算法更加有效。有效的提高机组运行寿命,降低风电场成本,提高风电场竞争力。
猜你喜欢
电力科学与工程(2022年9期)2022-10-10
电力建设(2022年7期)2022-07-04
东方汽轮机(2020年3期)2020-11-04
电子制作(2018年17期)2018-09-28
大电机技术(2018年4期)2018-09-26
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年4期)2016-04-04
电源技术(2016年2期)2016-02-27
电机与控制应用(2015年3期)2015-03-01
风能(2015年9期)2015-02-27