旋转变压器电气参数综合检测平台的开发
2023-11-16 08:17唐文涛李得至连大伟
制造业自动化 2023年10期
唐文涛,李得至,彭 佳,连大伟,颜 明
(1.荆楚理工学院,荆门 448000,2.襄阳寒桦精机有限公司,襄阳 441021)
0 引言
磁阻式旋转变压器(简称旋变)作为永磁电机的位置传感器,在汽车、航空等领域应用广泛。其天生具有结构简单、加工方便,能够连续高速、长寿命地运行的特点,具有抗干扰、耐高低温、耐湿度等优点,使旋变成为随动系统和伺服控制系统中不可替代的部件[1-3]。关于旋变的设计及开发目前已有较多的报道,但是有关它的电气参数的检测系统,目前主流的技术标准是基于GJB2143A多极和双通道旋变通用规范中电气参数测试方法规定来实施[4]。以旋变的电气误差为例,测试所有零位的电气误差,在最大正、负零位误差所处零位的极对下各测一对极的电气误差,每对极测24点(电气角度每隔15°测一点),取各位置误差中的最大值的绝对值为旋变的电气误差。基于该原理搭建的系统,存在效率低、角度分辨率不高不能实际反映旋变电气角度误差等缺点,在旋变的研发阶段尚可,但是在生产环节却显得不足。
本文以52-4对极旋变为例,搭建和开发了一种高效、高精度旋转变压器电气参数综合检测平台,能对旋变的电气角度误差、零点误差、变压比、阻抗、相位移、谐波分量等参数进行实时的检测,并能将各参数保存。平台具有较高的精度、可移植性、及可靠度,适用于旋变的研究、开发、生产等环节。
1 正余弦旋转变压器工作原理
旋转变压器由定子和转子组成,定子槽上分别绕有正弦励磁绕组,正弦输出绕组及余弦输出绕组。旋转变压器是利用转子与齿槽之间气隙的变化,使两相信号绕组输出的感应电动势与转子转角成正余弦变化关系。当转子转过一个电气周期时,输出电压变化周期数等于极对数。输出两相信号绕组输出电压具有相同幅值、频率,且对称布置,相位相差90°,正弦和余弦信号分别如式(1)、式(2)所示[5-7]:
式中:ku为电压变比,u1为励磁电压幅值;ω为励磁频率;P为转子极对数;θ为转子角。
要求解电气误差,实际旋变角度的解算就是关键。根据两相信号绕组输出基波电压同相分量的包络线的正切值,即可计算出转子的位置信息,如式(3)所示[8-10]:
式(4)中通过对输出两相值的符号,确定转子实际的角度位置θ′,即:当sin>0且cos>0时,转子位于第一象限,取i=0;当sin>0且cos<0时,转子位于第二象限,取i=1;当sin<0且cos<0时,转子位于第三象限,取i=2;当sin<0且cos>0时转子位于第四象限,取i=3。
2 平台的硬件结构
硬件结构主要由数据获取及数据处理两部分构成,具体如图1平台的总体架构所示。作为数据处理主体的上位机获取阻抗测试仪中的阻抗值并得到中央处理模块中旋变的励磁信号及输出正、余弦信号和并进行处理,通过上位机界面显示出电气参数信息。
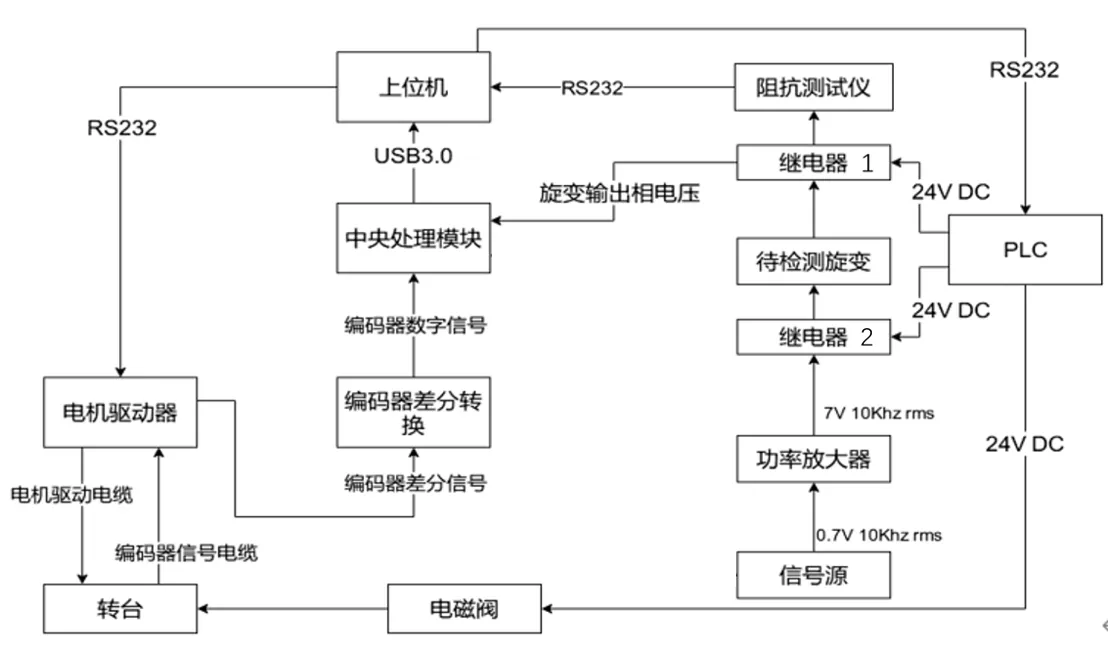
图1 平台总体架构
平台控制过程如下:首先信号源提供0.7V,10kHz的电压脉冲信号,同时上位机通过RS232串口控制PLC[11],将继电器1和继电器2打开,待测旋变获得电压有效值7V,频率10kHz的励磁信号,上位机通过RS232串口获得旋变的阻抗信息;其次,PLC通过继电器将阻抗测试仪关闭,旋变两路模拟输出信号打开;随后,PLC通过电磁阀给转台通电,上位机通过RS232串口控制电机驱动器,并驱动转台,中央处理器获得转台转动角度的增量脉冲信号,即可得到旋变旋转角度的参考信号,与此同时,中央处理器也获得了旋变输出的两路模拟输出信号,上位机通过调用中央处理器API将旋变的两路模拟信号转换成两路数字信号;最后,上位机从中央处理器中获取旋变角度的参考信号和实际信号,并分析与解算相关参数。需要强调的是,由于转台输出的角度信号为增量脉冲信号,由于其角度分辨率高及数据处理时采样率高,可以得到较高精度的旋变角度参考信号及拟合出纯净的励磁信号,由此保证电气参数解算的精度。
2.1 中央处理模块
中央处理模块选择PICO 5442D MSO示波器,主要完成两路模拟信号的采样,并将它们和转台输出的角度信号发送到上位机。硬件系统带宽(-3dB)60M;4个模拟通道,16个数字通道,满足系统两路模拟信号输入,1路数字信号输入的要求;USB3.0、3个通道时,使用Pico SDK,在14位模式时最大采样率达到125MS/s,缓冲区内存128 MS;输入范围±10mV至±20V全量程,根据旋变的实际输出电压范围,本系统选择±5V全量程,电压分辨率0.3mV;噪声(在±10mV范围),在14位模式下为100μV RMS。PICO 5442D MSO可以使用各种采样模式捕获数据,本系统采用块模式,采样率选取最大值125MS/s,模拟通道和1个数字通道的AD通道采样点数为83885764个,14位采样数据以二个字节存储,充分利用了缓冲区最大空间。对旋变输出两路信号的采样完全同步,保证了两路信号的正交。
相关接口函数如下:
ps5000aOpenUnit:打开PICO 5442D MSO;
ps5000aSetChannel:选择通道范围和AC/DC耦合;
ps5000aSetDigitalPort:设置数字端口;
ps5000aGetTimebase:选择时基,直到每个样本所需的纳秒为止;
ps5000aSetSimpleTrigger:使用触发设置功能设置采样触发;
ps5000aSetTriggerDigitalPortProperties:设置各个数字通道的触发方向;
ps5000aSetTriggerChannelConditionsV2;设置通道或端口的触发条件;
ps5000aRunBlock:启动示波器运行等到示波器准备就绪;
ps5000aBlockReady:回调(或使用ps5000aIsReady);
ps5000aSetDataBuffer:告诉驱动程序内存缓冲区在哪里;
ps5000aGetValues:从示波器传输数据块
ps5000aStop:停止使用;
ps5000aCloseUnit:关闭设备。
2.2 转台及驱动器
转台选择横川DD马达DMFE80-003RE型号,驱动器选择VCII-03-230。马达瞬时最大输出扭矩3.5N·m,连续最大扭矩1N·m,最大转速4rps,额定转速2rps,编码器分辨率1205760pulse/sev,绝对精度±32/±10arc-sec,重复定位精度±1.5arc-sec,负载安装面机械精度小于5μm。
转台的调试:首先,调整KNLD(微分增益),将KNLP(比例增益)设置为默认值的一半,将KNLI(积分增益)和KNLIV(导数-积分增益)设置为零,增加KNLD,直到ICMD(电流指令)出现振荡。ICMD纹波的可接受水平主要取决于负荷:轻负荷(<2x转动惯量),额定电流的5%为正常水平。其次调整KNLP,增加KNLP的值,直到PE(位置误差)出现振荡。随着KNLP比例增益的增加,各个运动相(加速、稳定、减速)的位置误差都达到稳定值。最佳效果为:各个运动相的位置误差达到恒定,并且在换相时(加速到稳定、稳定到减速、减速到停止)没有振荡。接着增加KNLIV,直到PE出现振荡,增加KNLIV增益,以减少位置误差,降低对外部扰动的敏感性,同时减少停止时的稳定状态位置误差。当KNLIV比例增益增加时,各个运动阶段(加速、稳定、减速)的位置误差减少。当每个运动阶段转换后,位置误差以最快可能速度降低,且转换时不存在振荡时,则调整达到最佳状态。随后调整KNLI,KNLI用来减少运动期间和停止时的位置误差。在不产生过冲或振荡的前提下,应尽量提高KNLI。最后调整kiff Spring 增益(柔性系统补偿)。系统中NLPEAFF值体现的是电机和符合间连接的自然振荡频率。系统柔性越高,此频率越低。因此NLPEAFF的调整从最高值开始,然后逐渐降低。
转台调试后,评价了转台在不同转速下的PE。由于系统将PE以脉冲数形式呈现,通过下列公式一能将脉冲误差转换成角度误差:
其中,每转线速为8194,反馈类型为128。考虑到转台启动和终止时加减速的影响,采用转台旋转1.5圈,即旋变此时经过1.5个机械周期,在中间稳定转速的1个机械周期中评价角度误差。通过图2所示,可以明显发现,转台在稳定转速10rpm,100rpm和150rpm下,最大误差角度分别约为±4.7秒,±9.3秒及±12.4秒。为满足实际生产中测试效率与测量精度的需求,转台速度可以选择100rpm,每台旋变的检测时间约为3秒。增量差分光栅脉冲信号通过驱动器发送到编码器差分转换模块进行处理。差分转换模块输出的是16位数字信号,需要在PICO 5442D MSO提取其中第三位数据即1路光栅脉冲信号。该脉冲信号其中有一定的杂波成分,需要再次经过PICO 5442D MSO示波器滤波处理。

图2 不同转速下PE(位置误差)
2.3 阻抗测试仪
阻抗测试仪选用同惠TH2810D型LCR数字电桥。TH2810D提供与PC通讯的RS232接口,全双工异步通讯,通过该接口可以实现所有面板按键功能,并可通过该接口查询仪器的测量状态采集测试结果。主机发送的命令以ASCII代码传送,以NL(即换行符,ASCII代码10)为结束符,TH2810D收到结束符后才开始执行命令。TH2810D一旦执行到查询命令,将立即发送查询结果。为了保证测试结果稳定准确,选择TH2810D的SLOW测试速度,每秒约2.5次;根据旋变的电阻范围,选择TH2810D在100源内阻时,1K量程;波特率9600bps,数据位8BIT,停止位1BIT。
2.4 信号源
信号源选用普源RIGOL DG4202函数/任意波形发生器。该设备最高可输出200MHz正弦波,能满足激励源10KHz频率的要求,具有500MSa/s采样率,14bits垂直分辨率,具有2ppm高频率稳定度,相位噪声低至-115dBc/Hz,可生成稳定、纯净的信号。尽管输出信号电压有效值幅值为0.7V,通过功率放大器后,经过频谱分析,可以得到电压有效值幅值为7V,频率为10kHz的纯净的正弦励磁信号,可以有效地消除电源中携带的谐波对旋变的解算角度的影响。
2.5 转台定位部件
转台定位部件如图3所示,整体结构采用7075铝合金非导磁材质设计加工,装配精度0.02mm[12]。转子固定在转台轴,两个压紧气缸-2保持转子水平固定,压紧气缸1及两个固定端构成三角结构,保持旋变在平面上的稳定。端子压紧气缸用来保持旋变与外接信号线路的无缝连接。气缸的开、断由PLC控制,定、转子同心度0.02mm。
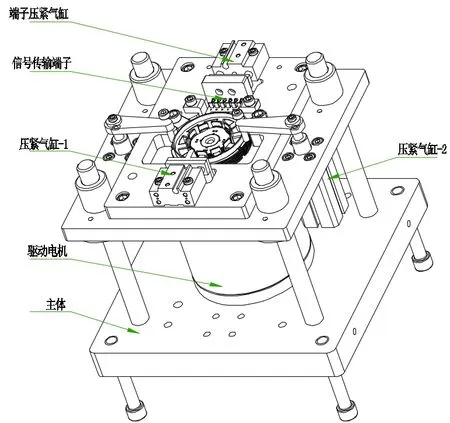
图3 转台定位部件
3 平台的软件结构
PICO 5442D MSO示波器提供了丰富的API,基于数据精度处理的需要,上位机中数据的处理及参数的显示通过MATLAB平台来实现[13]。软件流程图如图4所示。
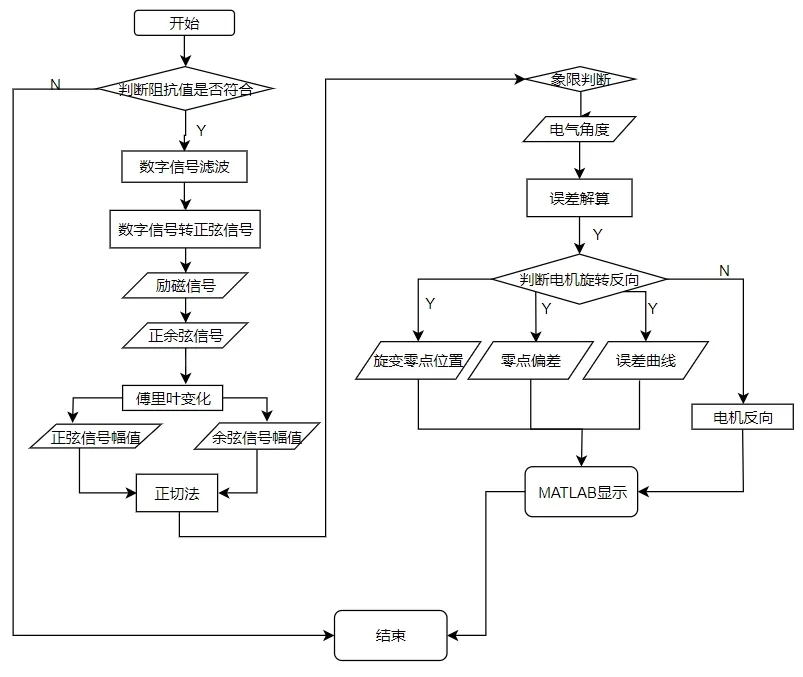
图4 平台软件流程图
具体过程如下:初始化相应串口,定子转子同心定位;转台转动,阻抗检测仪检测旋变的阻抗值,设置阻抗值的范围值,通过得到的实际值和这个范围值来进行比较,来判断阻抗是是否合格,如果不合格程序将直接结束;将示波器采集到的脉冲信号进行滤波优化处理,并得到同频方波信号;方波转换为同频同幅值励磁信号,根据脉冲数也能得到电机的旋转角度即旋变旋转的参考角度;由于输出两相信号中存在同频的高频干扰,通过差分运算,对连续尖峰和现实的电磁干扰又很好的抑制,由此排除共模噪声的干扰[14-15];将得到的正余弦调制信号做幅值检波,由此得到输出的正余弦信号,并做傅里叶分析,得到包括基波在内的谐波信号,并获得两相信号基波电压的同向分量;通过正切法和角度象限判断可以解算出旋变的实际角度;通过实际角度和参考角度可以得到旋变的电气角度误差;按照国标要求,从零位误差最大值来确定电气误差的的电气周期,把该周期内电气角度误差的正向和负向最大偏差偏差值分别作为旋变的最大正向和负向电气角度误差;输出基波同向分量的电压幅值与励磁电压幅值的比值即为变压比;最后将阻抗值、电气误差、零点误差、变压比、谐波分量等参数在界面上显示。图5中蓝色代表励磁信号、红色代表正弦调制输出信号,绿色代表正弦调制输出信号同向分量包络线。

图5 励磁信号、输出正弦信号及其包络图
径向磁路磁阻式旋转变压器相对于绕线式旋转变压器来讲,具有体积小、结构简单、成本低等特点,因此可靠性好、故障少、寿命长[16]。但是由于径向磁路的磁阻式旋转变压器在转子位置变化时,气隙长度随之不断改变,因此输出阻抗值不固定,并且受负载影响较大,且气隙磁导中含有较大成分的高次谐波。谐波的存在影响旋变的电气误差,为分析输出精度,对波形提取包络线后实施傅里叶变换并获取各谐波分量。傅里叶变换需满足狄利克雷条件,即满足有限个间断点和极值点的条件,x(n)绝对可和,即满足表达式的条件[17]。由于系统采用长方形窗口傅里叶变换,故窗口内的波浪激励数据点数N为常数,显然一个电气周期内,两相输出信号有限数据均满足该条件。则N点序列x(n)的离散傅里叶变换(DFT)为:
式中,i=0,1,2,…,N-1;。根据DFT,未知频率激励力可分解为几种频率正弦波形及噪声叠加,分析该波频率含量,可得系列频率正弦波:
式中,F1-Fn为分解所得n次正弦波对应的幅值;ω1-ωn为分解所得n次正弦波对应的角频率;∅1-∅n为分解所得n次正弦波对应的初相位。不同角频率正弦波对应的幅值可以反映出旋变的谐波特性。
取一个电气周期的励磁信号同向分量,如图6上所示,经过FFT运算后,频谱如图6所示,可见基波占主导,直流分量和其他谐波分量接近0值,证明同向基波分量的提取是可靠的。
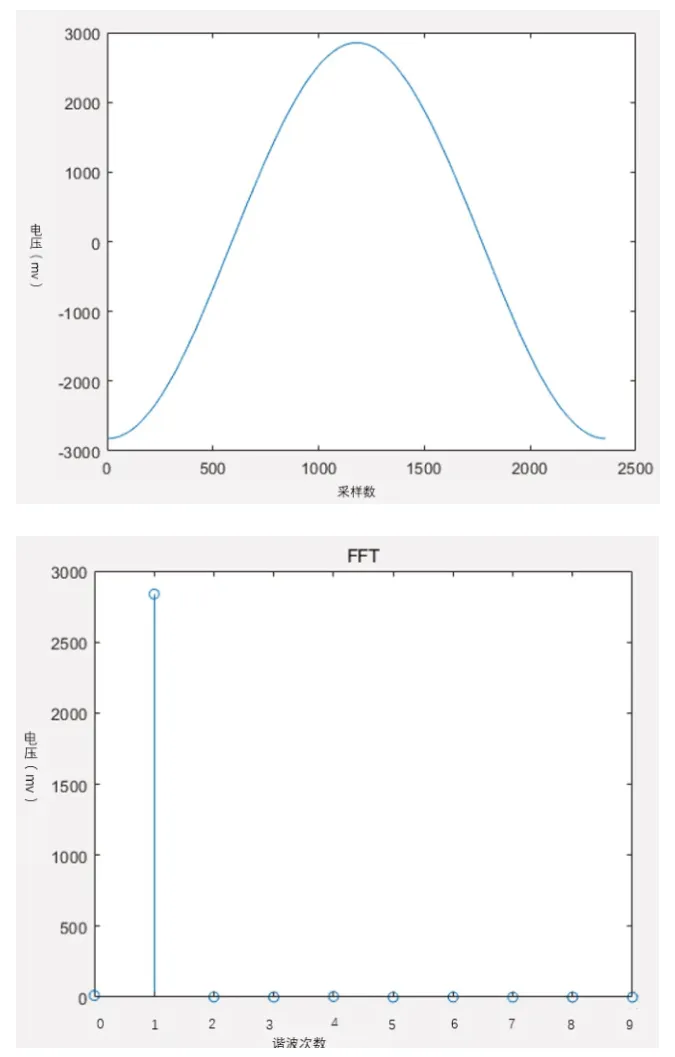
图6 励磁信号同向分量及其FFT谱分析
4 系统展示
52-4对极旋转变压器电气参数综合检测平台转台如图7左所示,图7右为硬件控制平台[18];图8中显示了产品的上位机界面,能实现零点偏差、正向电气误差、负向电气误差、阻抗值、变压比、相位移、谐波分量的检测,并依据电气角度误差±30分,输入阻抗值120±20Ω,输出阻抗值408±20Ω,变压比0.286±10%,作为产品是否合格的标准。上位机界面中最下部的绿线显示了一个机械周期的电气角度误差,黄线部分为零点偏差最大电气周期的电气角度误差的曲线,代表了旋变的精度分。该测试旋变电气误差正向偏差为18.1365分,负向偏差为6.7117分,零点偏差6.3532分,输入阻抗值100.058Ω,正弦输出阻抗456.701,余弦输出阻抗456.927,正弦输出项与励磁项的变压比0.26583,余弦输出项与励磁项的变压比0.26261,正弦输出项相位移-6.8141度,余弦输出项相位移-7.6339度,正弦输出项直流量、基波、二次谐波、三次谐波、四次谐波、五次谐波分别为-11.8mV、2646mV、4.18mV、1.36mV、1.04mV、6.3mV,相应余弦项为-10.1mV,2606mV,4.16mV,1.9mV,1.38mV,6.41mV。测试结果显示该产品合格。除此之外界面也定义了部分的快捷键操作功能。对测试原始数据都保存在excess中,如图9所示,方便对不同产品的不同参数的数据进行分析和处理。
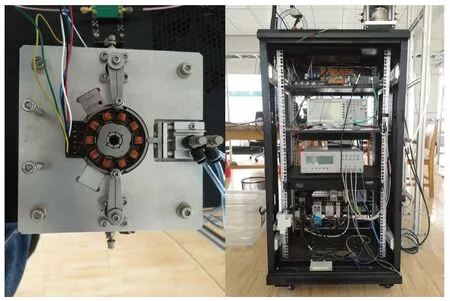
图7 旋变综合测试硬件平台
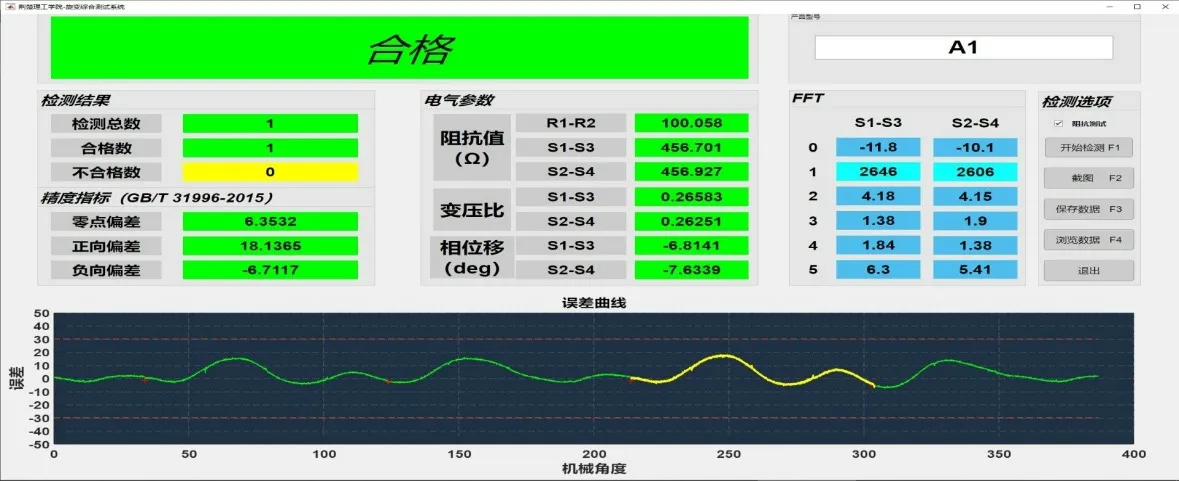
图8 系统上位机界面

图9 实验数据保存
5 结语
PICO 5442D MSO的采样频率远高于转台励磁脉冲频率,转台的绝对精度决定了励磁信号角度的精度,也就是系统的电气误差的精度,即±10arc-sec;因为励磁电压为标准纯净的信号,变压比的精度由PICO 5442D MSO的采样精度决定,尽管采样位数为14位,但是差分处理后,实际采样位数为15位,以两相输出幅值电压有效值为2V计算,电压精度为61μV;系统检测时间主要由阻抗仪检测时间、转台运动时间及上位机数据处理时间决定,在转台以100 rpm转速在1周半内及TH2810D的SLOW测试速度下,经测定完成一次检测需要15秒。输出阻抗精度由阻抗测试仪精度决定,为100Ω±5%。
猜你喜欢
河北电力技术(2021年2期)2021-07-29
电子制作(2018年1期)2018-04-04
电子制作(2017年7期)2017-06-05
大电机技术(2017年3期)2017-06-05
电测与仪表(2016年15期)2016-04-12
黑龙江工程学院学报(2015年5期)2015-12-04
电源技术(2015年5期)2015-08-22
电源技术(2015年11期)2015-08-22
电测与仪表(2015年8期)2015-04-09
电测与仪表(2015年7期)2015-04-09