光纤应变技术在水轮机尾水门物理场模型构建中的应用
2023-11-16 01:38罗金文唐晓丹李初辉刘绍勇黄天雄胡庆雄
水电站机电技术 2023年10期
罗金文,唐晓丹,李初辉,刘绍勇,黄天雄,胡庆雄
(中国长江电力股份有限公司乌东德水电站,云南 昆明 650000)
0 引言
尾水管是混流式水轮机的最后一个过流部件,其主要作用为将转轮出口水流引向下游,并对转轮出口的动能进行回收,提高水轮机的整机效率。为方便尾水管检查和转轮维护,一般在尾水管的锥管段设置有外开、铰链式的矩形进人门,门盖通过螺栓把合的方式进行固定和密封,是机组日常巡检的重点区域。机组运行期间,尤其是低负荷、升压和甩负荷等极端工况,尾水管承受着周期性的压力脉动,国内外水电机组均出现过进人门螺栓松动及断裂、焊缝开裂漏水等问题[1-3],容易诱发水淹厂房的重大安全事故。
本文以某巨型混流式水轮机尾水进人门为例,首次采用光纤光栅应变在线监测传感技术,对尾水门有限元仿真模型进行了真机实测精度验证,为高精度尾水门数字孪生物理场模型构建提供可靠依据。
1 发电设备数字孪生与智能运维
随着物联网、大数据、人工智能、先进监测技术和设备健康管理与故障诊断技术的进步与融合,大型工业装备也朝着设备数字化、管理数字化和服务智能化等应用方向发展。数字孪生技术作为一项联系物理实体和数字模型的关键技术,可以实现物理实体和数字孪生体之间的双向映射和动态交互,通过实时监测、动态感知物理实体的实际状态,使用数字孪生物理场模型进行优化、决策、诊断和预测,达到对水电机组实体全生命周期监测和控制的目标,为机组数字化智能运维提供技术支撑[4-6]。
物理场模型构建的关键技术包括新增传感装置、模型构建、仿真分析和预测诊断功能开发,其中,仿真模型精度的真机验证是整个模型构建过程中最为基础和关键的环节。
2 结构应变监测原理
结构应变测量方法包括应变片电测法、光纤光栅应变测量法、数字图像相关法、X 射线应力测量、声弹性超声测力法等[7-8]。由于光纤传感器具备信号衰减小、可长距离测量、抗电磁干扰、长期零点稳定、温度漂移微小、灵敏度高、准分布式测量、安装工艺简便可靠等优点,本项目中采用四川拜安科技有限公司的焊接式光纤光栅传感器进行尾水门结构应变的在线监测。
图1 焊接式光纤光栅应变计外形图

表1 光纤光栅应变计主要技术参数
2.1 光纤光栅应变测量原理
光纤光栅是利用光纤布拉格光栅(FBG)反射波中心体波长随外力和温度而变化来测量结构件的应变,其计算公式为:
其中:ε为当前结构实际应变,单位με;Kε为恒温下的传感器应变系数,单位με/mm;λε为应变光栅的实时波长值,单位nm;λε0为应变光栅标定环境下的波长值,单位nm;ΔT为当前温度与标定温度的差值,单位℃;C为传感器的温度补偿系数,单位nm/℃。
2.2 传感器温度系数标定
将焊接式光纤应变传感器同批次样品,焊接于基体上,通过温箱进行-20~80℃范围内6 支传感器的温度梯度加载试验。
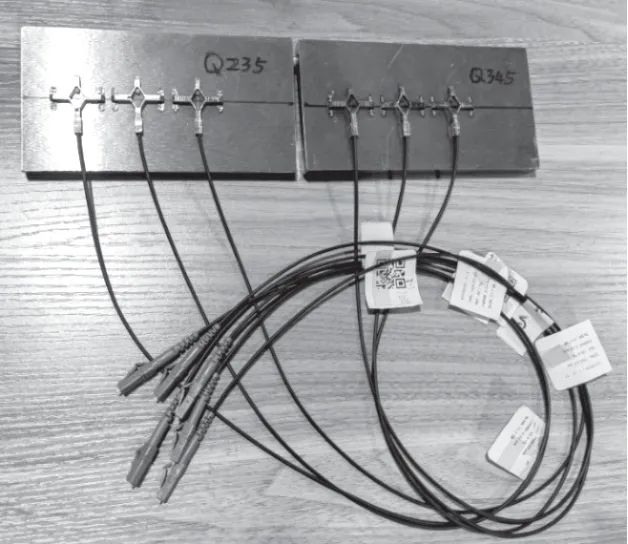
图2 温度系数试验用工装
光纤光栅焊接式应变传感器通过封装结构设计,包括自身材料的选用、结构形式的设计、灵敏度系数的调整等,可以有效降低传感器焊接于碳钢上的整体温度系数,达到自身补偿的效果。由材料自身热膨胀系数(10.6~12.2)με/℃降低至2.4 με/℃附近。添加温度传感器进行温度补偿后可以有效降低结构由于温度带来的影响,在0~30℃的温度范围内,基本可以将应变误差控制在±10 με 以内。
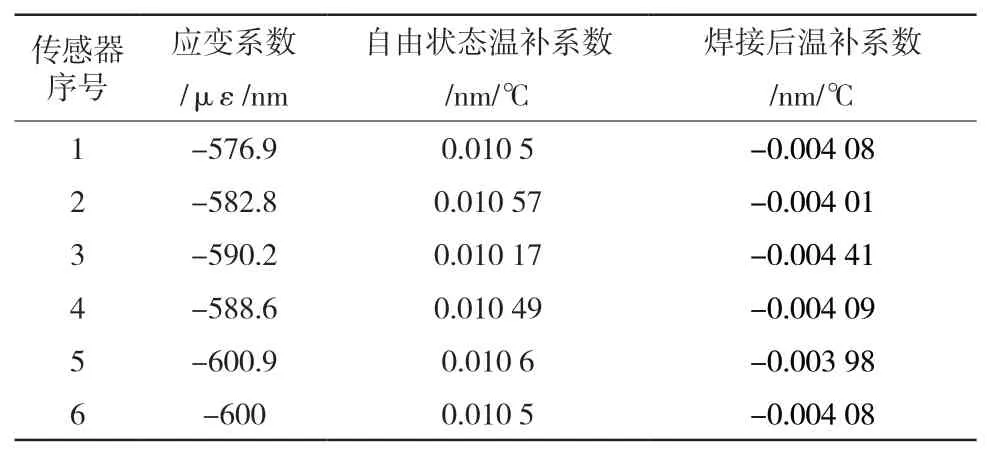
表2 应变系数及温度补偿系数试验值
3 尾水门光纤应变监测现场实施
本电站尾水进人门采用分体式补强设计,根据进人门结构特点,光纤应变测点布置选择锥管本体,避开补强板和局部应力区,详见图3~图4。
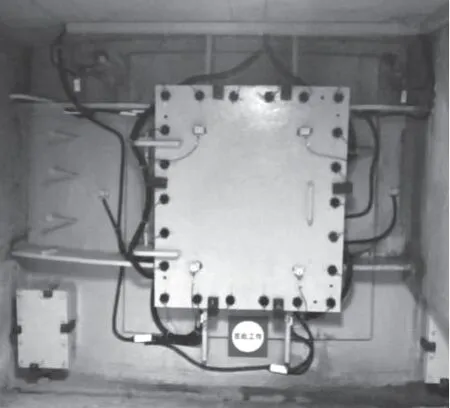
图3 尾水进人门现场图

图4 光纤应变测点布置图
锥管半锥顶角为6°,可解析估算其在尾水压力下的周向及轴向微应变[9]。
其中:p为尾水压力;r为进人门高程的锥管半径;E为弹性模量;t为锥管壁厚;α为半锥顶角。
根据式(3),每0.01 MPa 尾水压力变化对应的周向应变变化值为7.5 个微应变;电站在0.24 MPa 尾水压力下,对应的周向微应变为180。
4 仿真验证
4.1 有限元仿真模型
按电站进人门混凝土廊道实际尺寸对模型进行截断,四周固支;进人门筋板和锥管环筋采用壳单元建模,本体采用六面体网格,与本体施加壳-实体耦合约束;网格特征尺寸10 mm,模型网格单元约52万;按电站实测锥管进口压力进行加载。
4.2 结果验证
根据现场在线监测数据,统计了尾水压力0.22~0.31 MPa 范围内的实测相对变化值,见图5。
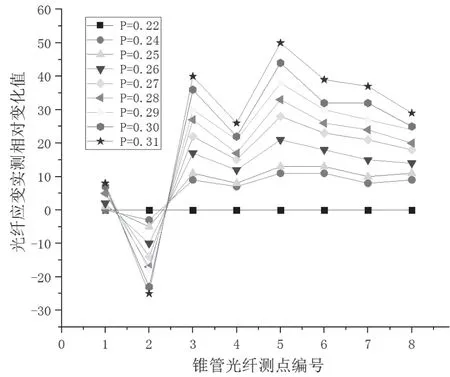
图5 尾水进人门实测相对变化值(以0.22 MPa 为基准)
尾水压力0.27 MPa 的载荷下,实测值与有限元仿真值比对及相对误差详见图6~图7。二者吻合度较好,除测点1~2 应力集中区外,测点2~8 的相对误差均在±5%以内。

图6 实测值-仿真值对比
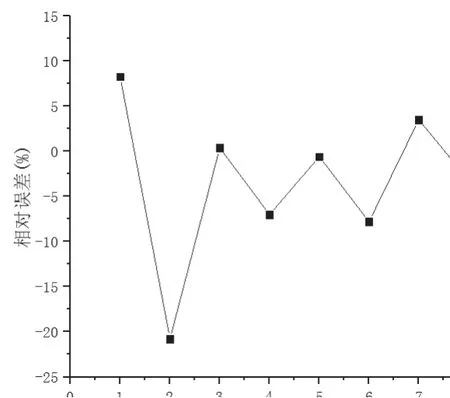
图7 仿真值相对误差
5 结束语
本文采用实测和有限元仿真相结合的方法,解决了水轮机尾水进人门长期以来有限元计算无法验证的问题。
通过本项目的实施,对尾水门仿真模型的建模、边界和载荷条件等进行了真机验证,为尾水门数字孪生物理场模型构建提供了关键技术支撑,并为机组其它部件物理场模型构建提供了实例参考。
猜你喜欢
今传媒(2022年12期)2022-12-22
当代水产(2022年2期)2022-04-26
党史纵览(2022年4期)2022-04-25
云南化工(2020年11期)2021-01-14
红领巾·萌芽(2020年8期)2020-10-27
湖北农机化(2020年4期)2020-07-24
作文评点报·作文素材初中版(2020年24期)2020-06-21
供水技术(2020年6期)2020-03-17
高师理科学刊(2016年8期)2016-06-15
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27