
谐振梁加速度计测频噪声分析与实验
2023-11-19 08:06徐文逸王绍航马宇琨韩丰田
中国惯性技术学报 2023年10期
徐文逸,王绍航,马宇琨,韩丰田
(清华大学 精密仪器系,北京 100084)
谐振梁加速度计利用精密机械谐振器的力-频转换特性将输入加速度转换为谐振频率变化,具有动态范围大、稳定性高、准数字输出等优点,是高精度微机电系统(Micro Electro Mechanical Systems,MEMS)加速度计的重要发展方向,在高精度惯性导航、海空重力测量等领域具有广阔的应用前景[1]。
对于谐振梁加速度计的工程应用,频率测量要满足实时性、高更新率、高分辨率等要求。常用的测频方法,基于计数法原理的有直接计数法、等精度测频法、连续时间标记法[2]、延迟链法[3]、多路移相时钟法[4]等;基于相位差原理的有相位重合测频法[5]、游标法[6]、差拍法[7]、锁相环[8]等。基于计数法的测频方法原理简单,但提高精度往往需要消耗更多硬件资源;基于相位差的测频方法精度极高,但对于相位差检测电路同样有着很高的精度要求。现有文献主要针对加速度计标定测试需求,侧重于研究低采样率(如1 Hz)下的测频技术,而谐振梁加速度计应用于惯性导航系统时,需要以数百至数千Hz 采样率更新测量结果,此时频率噪声是制约测频系统性能的主要因素。本文针对高采样率、低噪声测频需求,推导了等精度测频法和连续时间标记法的噪声功率谱密度模型,分析并测试了高采样率下串入低通滤波器前后两种测频方法的噪声水平,可兼顾加速度计测量带宽与采样率的不同需求。
1 谐振梁加速度计工作原理
常见的硅微谐振梁加速度计(Micromechanical Resonant Accelerometer,MRA)的基本结构见图1,包括检测质量、谐振梁、梳齿电极和支承梁等。
当输入加速度沿x轴方向施加时,检测质量两侧的谐振梁分别受到拉力和压力,导致两侧谐振梁的固有谐振频率差动变化。加速度计控制电路通过布置在谐振梁两侧的梳齿电极检测振幅并驱动谐振器工作在谐振状态,通过测量两个谐振频率并解算其差值,可反映输入加速度的幅值和极性[1]。
2 测频噪声分析
2.1 等精度测频法
对于一个周期性信号,测量其频率最简单直观的方法即直接计数法,原理是在闸门时间T内对输出周期进行计数,得到计数值N,则信号的频率f为:
图2 给出了直接计数法的原理。可以看出,由于闸门开启和关闭时刻不一定与待测信号的上升沿完全重合,因此计数值N中存在±1 个计数误差。
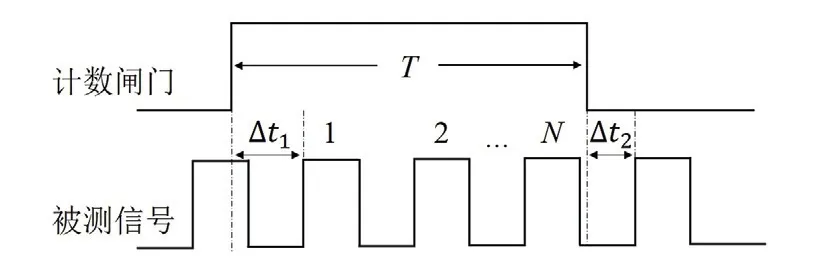
图2 直接计数法原理Fig.2 Conventional counting method
设信号真实频率为f*,则有:
测量频率f与真实频率f*的误差为:
其中Tsignal为被测信号周期,可以看出直接计数法的误差与闸门时间成反比。
20 世纪80 年代,有研究人员在直接计数法的基础上提出等精度测频法[2]。在等精度测频法中,实际闸门信号的开启与关断由被测信号上升沿触发,单次测量的原理框图如图3,时钟信号计数值不断累加,并在每个被测信号的上升沿输出与上一个上升沿时的时钟计数之差N。

图3 等精度测频法单次测频原理框图Fig.3 Block diagram of equal precision method in one period
等精度测频法可以有效地消除实际闸门信号内的被测信号计数误差,具有原理简单、占用硬件资源少、易于实现、精度高等优点。
由于实际闸门的开启与关闭不一定与时钟信号的上升沿完全重合,因此闸门时间内存在±1 个时钟计数误差[9,10],如图4 所示:
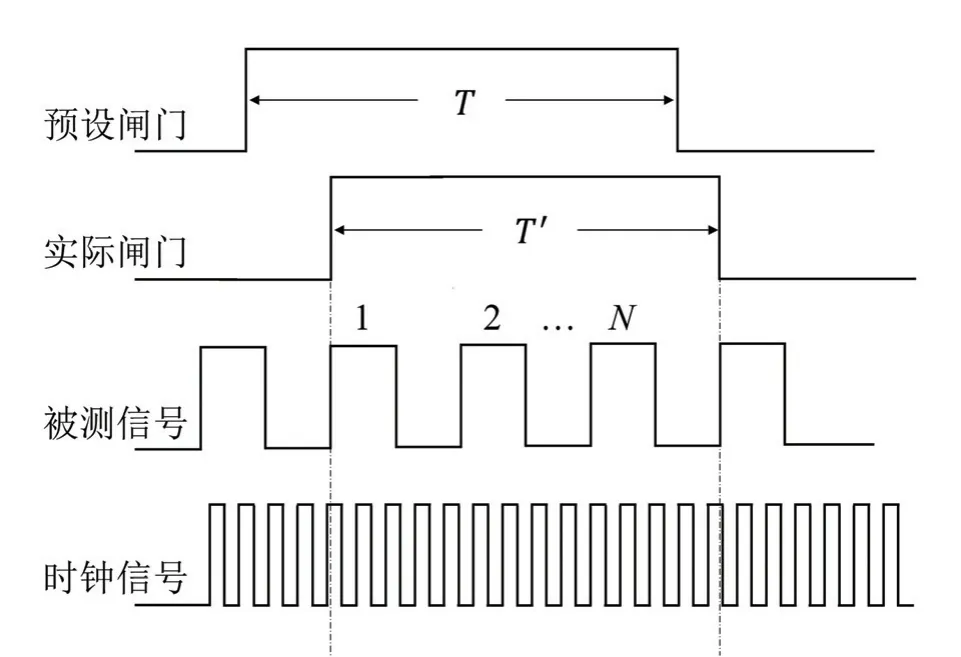
图4 等精度测频法测频示意图Fig.4 Schematic diagram of synchronous periodic counting
由式(2)(3)可以推导出等精度测频法的测量误差:
比较式(3)(4)可知,相较于直接计数法,等精度测频法把待测信号的周期计数误差转换为时钟周期的计数误差,将量化误差缩小到原先的。选取的时钟频率fclk越高,测频精度越高。
测频噪声实验中,使用安泰信ATF20B 信号发生器生成8 Vp-p、20 kHz 的被测正弦信号,通过前置比较器电路将其转化为方波信号后输入到FPGA 管脚,在FPGA 测频电路中通过等精度测频法测量其频率,时钟频率设置为20 MHz,闸门时间T设为1 s,由式(4)计算得出,Δf≤1 mHz 。与图5 的测频结果吻合。
图5 等精度测频法的测频结果Fig.5 Frequency measurement result of synchronous periodic counting
下面分析测频噪声的功率谱密度。设在第n个周期内,闸门时间为R[n],时钟计数量化输出为N[n](即闸门时间内时钟计数对应时间),当前时钟周期的量化噪声为e[n](即闸门关闭时对应的时钟信号被截断的周期剩余部分),则有:
使用等精度测频法测频时,测量结果f满足:
式中Ninputsignal为闸门时间内被测信号周期数,实际频率f*为:
因此f与f*的偏差Q(n)为:
式(9)中e[n] -e[n-1]视为零均值随机变量,故省略负号。
将式(8)代入式(9),得:
若闸门时间R[n]取为常值R,在z 域下有:
即测量结果的噪声是对时钟量化噪声e(z)的一阶整形。
在频域下,有[11]:
由Parseval 定理,导出其单边功率谱密度为:
设测频信号采样率(也即输出更新率)为fs,闸门时间即:
式(15)中Se(f)是量化噪声e[n]的功率谱密度。量化噪声视为上均匀分布的白噪声,其功率谱密度为:
将式(16)代入式(15),得到等精度测频法的测频噪声功率谱密度:
实验中分别利用信号发生器和课题组研制的硅微谐振梁加速度计(见图6(a))输出被测信号,并使用课题组自研FPGA 测频模块(见图6(b))进行频率测量。由前面的分析可知测频精度与参考时钟信号的精度有关,因此FPGA 采用高精度20 MHz 温补晶振作为参考时钟,在-20℃~70℃工作温度范围内频率漂移小于0.1 ppm。
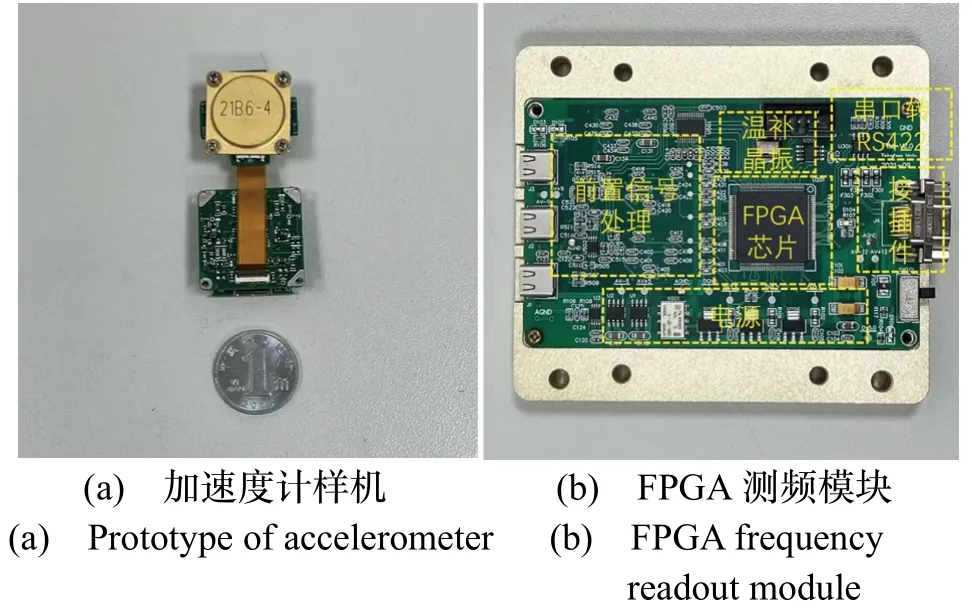
图6 实验中所用硅微谐振梁加速度计样机及测频模块Fig.6 The MRA prototype and frequency readout module used in the experiment
加速度计的单侧谐振频率约为23437 Hz,将信号发生器的频率也设为该值。在FPGA 测频模块中使用等精度测频法分别对加速度计和信号发生器输出的信号进行频率测量。设定输出更新率fs=f*,测频数据通过串口传输至上位机记录。
将采集到的数据在MATLAB 中进行处理,图7是计算出的功率谱密度图。
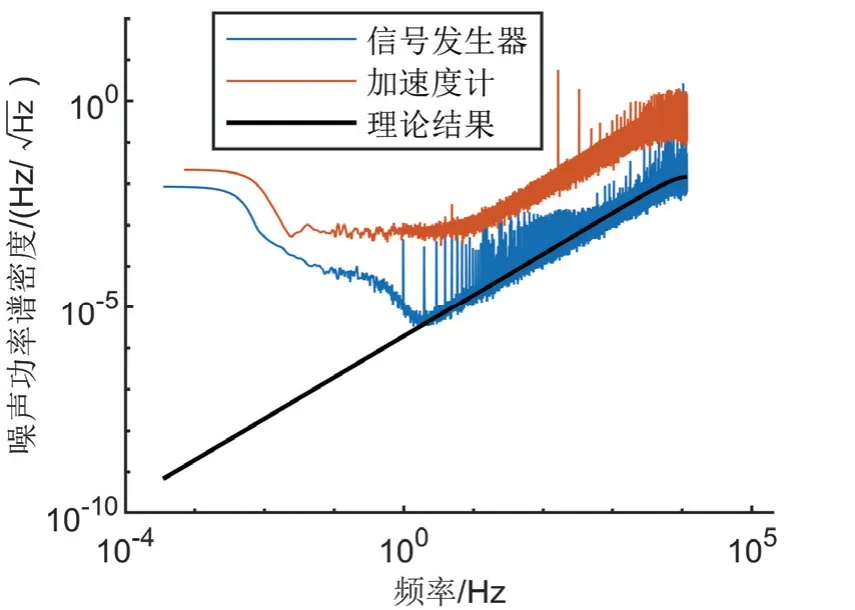
图7 等精度测频法测频噪声功率谱密度Fig.7 The noise power spectral density of synchronous periodic counting
可以看出信号发生器输出信号的噪声功率谱密度在1 Hz 以上的频段和式(17)吻合较好,低于1 Hz 频段的差异是被测信号存在温漂、时漂等低频噪声所致。加速度计信号本身的频率噪声较信号发生器大1~2 个量级,这是由于加速度计的输出信号耦合了结构、电路等噪声。等精度测频法对量化噪声进行了一阶整形,其测频噪声功率谱密度曲线以20 dB/dec 的斜率上升,部分测频噪声被搬移到测量带宽之外,从而降低了带宽内的测频噪声[12]。
2.2 连续时间标记法
21 世纪初,文献[2]中提出基于最小二乘法拟合原理的连续时间标记测频法,硬件上仅需采用一个寄存器和一个计数器。其原理是在闸门开启的时间内对被测信号和时钟信号分别进行计数,并对每个被测信号的上升沿进行标记。闸门关闭后,得到n个数据点{xk,Tk}。其中n为输入脉冲个数,xk是标记点被测信号计数值,也即从1 到n的自然数序列,Tk是对应时钟量化输出。闸门的开启与关闭同样由被测信号的上升沿控制,对闸门内n个数据点线性拟合得到一条直线,其斜率的倒数即为频率测量值[13],表示为:
类似地,由式(6)可以推导出第n个闸门时间内,连续时间标记法的偏差为:
其中m为每个闸门时间内的被测信号周期数,则Q(n)的方差为:
量化误差项视为白噪声,得到连续时间标记法的测频噪声功率谱密度为:
利用连续时间标记法分别对信号发生器和加速度计的输出信号测频,设输出更新率为400 Hz,测得两者的噪声功率谱密度如图8。
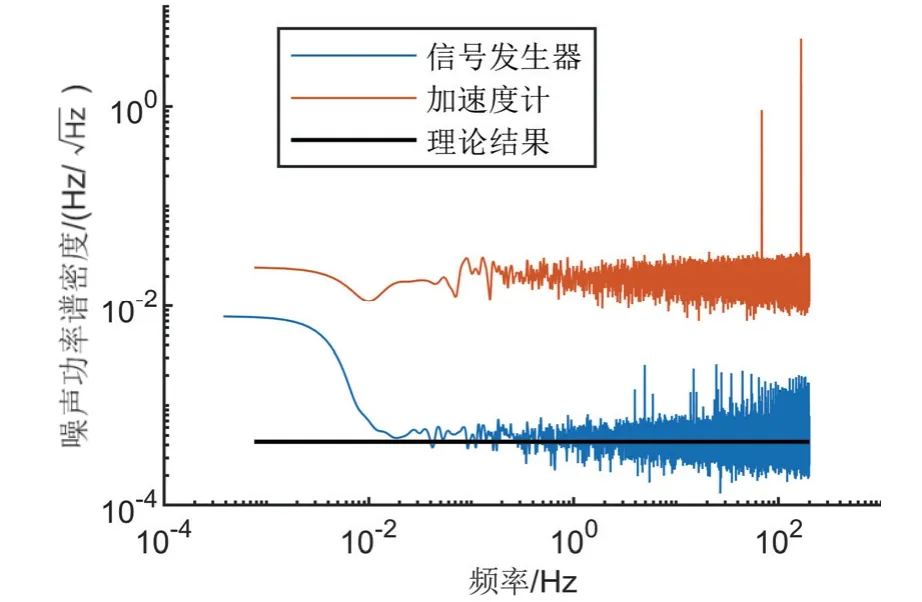
图8 连续时间标记法测频噪声功率谱密度Fig.8 The noise power spectral density of continuous time stamping
对于硅谐振式加速度计,谐振频率通常在几十kHz,因此以较低的测频更新率输出时会混叠高频噪声。与等精度测频法相比,连续时间标记法不具备噪声整形特性,全频段内噪声功率谱密度较为平坦,因此高频噪声较低,低更新率下可以有效避免噪声混叠。
3 高更新率下测频噪声分析
应用于惯性导航系统时,要求加速度计数据输出更新率高达几百乃至上千Hz,因此有必要评估高更新率下两种测频方法的噪声性能。
由式(17)(21),可以得出等精度测频法和连续时间标记法的噪声标准差σE和σC分别为:
可以看出,等精度测频法的噪声与更新率成正比,连续时间标记法的噪声与更新率成3/2 次幂的关系。将前面采集到的信号发生器原始输出数据导入MATLAB,分别使用两种测频方法计算噪声(用相对分辨率即表征),图9 是两种测频方法的相对分辨率与更新率的关系,可以看出在1~1000 Hz 范围内,连续时间标记法的测频噪声均低于等精度测频法。
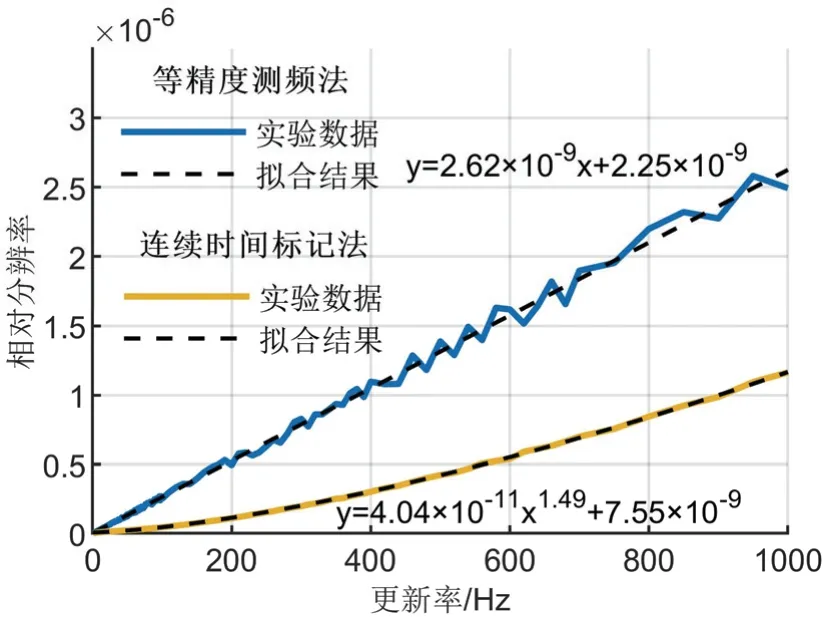
图9 两种测频方法相对分辨率与更新率的关系Fig.9 The relationship between the relative resolution and update rate of the two frequency measurement methods
图中的计算结果与式(22)(23)的结果有一定的偏差,这是因为实际的量化噪声Se(f)并非式(16)中理想的白噪声。一方面,从图7 中可以看出,噪声功率谱密度曲线中存在较多跳变,这些跳变点对应的频率值是实际的信号频率和时钟频率的公因子频率,是量化噪声并非均匀分布,而是存在着量化相移分辨力[14]所导致的;另一方面,实际测频噪声中耦合了主频时钟的相位抖动、比较器触发误差及被测信号的固有噪声等[1]。因此,式(22)(23)一般只用于估计噪声的数量级,不适合进行精确计算。
为抑制高频噪声,本文提出对频率测量结果进行数字低通滤波的改进测频方案,并详细分析了滤波器带宽、不同测频方法对测量噪声的影响。
出于ASIC 集成方面的考虑,数字滤波器常用CIC 滤波器或Butterworth 低通滤波器。CIC 滤波器常用于多速率信号处理系统中,可以以较少的硬件资源实现数字滤波和采样率转换。
以CIC 降采样滤波器为例,抽取倍数设为R,单级滤波器应具有如下形式的冲激响应[15]:
对该冲激响应进行z变换后,得到传递函数为:
N级CIC 滤波器级联的幅频响应为:
CIC 滤波器虽然有着占用资源少,无需乘法器的优点,但是通带误差高,阻带衰减低[16],需要多级CIC 滤波器级联或添加补偿滤波器才能获得较好的滤波效果。此外,由式(27)可以看出CIC 滤波器的带宽与降采样率R、级联数N均有关系,且无解析解,这就使得CIC 滤波器的带宽难以灵活配置。
由于测频结果对相位没有特殊要求,因此本文选用参数更少、更易于设计的4 阶IIR Butterworth 低通滤波器。
Butterworth 滤波器的幅频响应为:
其中N为滤波器阶数。
由式(17),等精度测频法串接4 阶Butterworth 低通滤波器后的噪声功率谱密度为:
测频噪声方差为:
4 实验与结果分析
4.1 低通滤波对比分析
使用 MATLAB 中的滤波器设计工具filterDesigner 设计数字滤波器并处理测频结果,滤波器选择4 阶直接II 型IIR Butterworth 低通滤波器,采样频率Fs与实际信号频率保持一致,在此基础上分析不同的滤波器截止频率fc、数据更新率fs、不同测频方法对噪声的影响。由于测频数据的采样率等于输出更新率,因此在每个fc对应的曲线中只画出fs> 2fc的部分,结果如图10 所示。
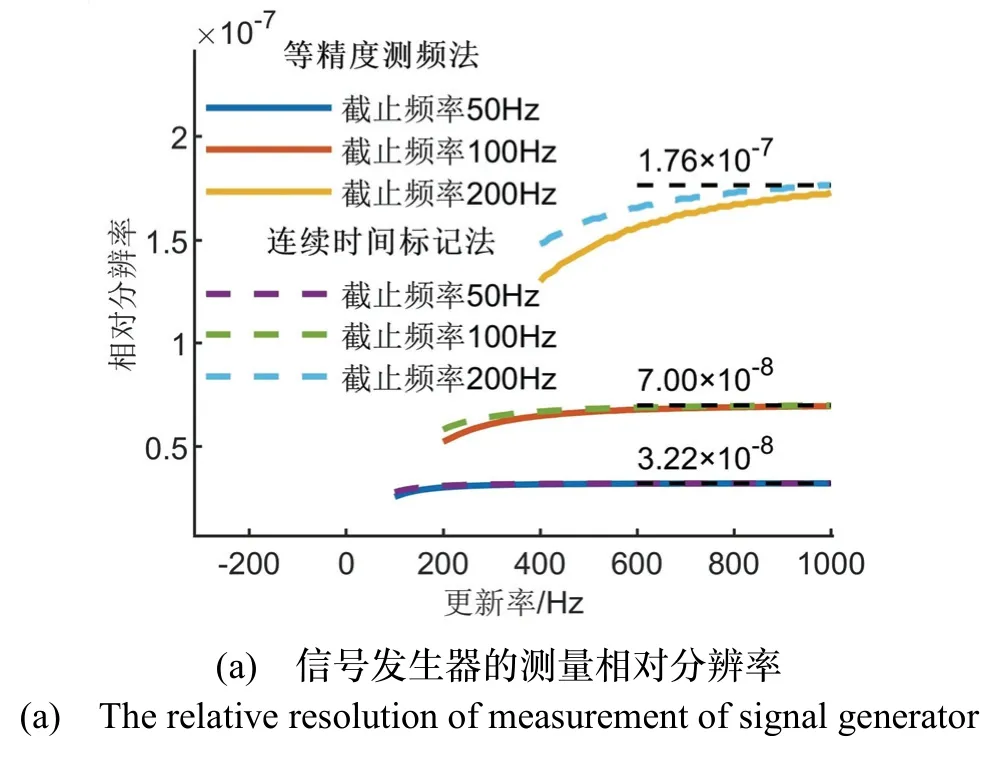
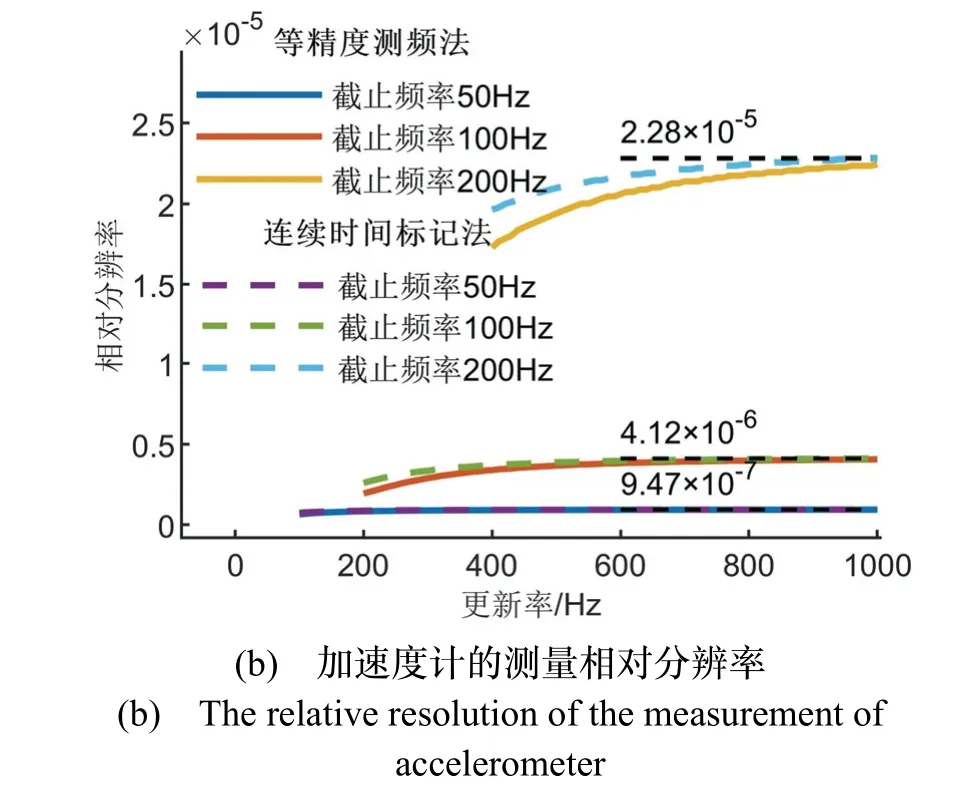
图10 串入低通滤波器后的测频相对分辨率Fig.10 The measured relative frequency resolution with lowpass filter
在串入低通滤波器后,高更新率下连续时间标记法与等精度测频法的噪声水平基本相当,且随着更新率的提高,噪声趋于同一常数。这是因为滤波器滤除了绝大部分的高频测频噪声,使得测频结果接近于信号本身的噪声。表1 是相对测频分辨率在1 kHz 处的收敛结果。
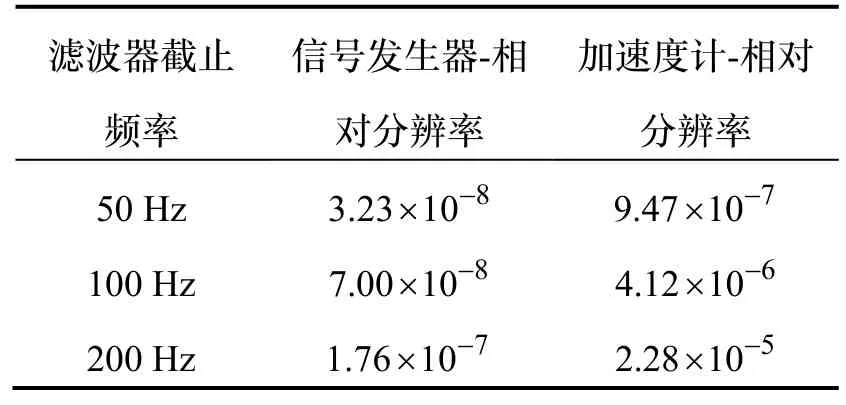
表1 相对分辨率收敛结果Tab.1 The convergence results of relative frequency resolution
对比图9 可以看出,在串入低通滤波器后,由于滤除了混叠的高频噪声,等精度测频法的测频噪声反而略优于连续时间标记法。
4.2 加速度计样机性能测试
基于两种测频方法,本文对研制的加速度计样机(编号21F2-4)展开了性能测试,被测样机的设计量程为±20g,测得样机的标度因数为228.5 Hz/g。
首先对21F2-4 样机进行了常温零偏稳定性测试。将样机安装于分度头上,样机敏感轴处于水平方向,其输出经FPGA 测频模块处理后送至上位机记录。设置测量更新率为500 Hz,低通滤波器截止频率为200 Hz,图11 是实验装置照片。

图11 零偏稳定性测量实验装置Fig.11 MRA setup for test of bias stability
室温条件下,样机上电热稳定后,分别使用等精度测频法和连续时间标记法测量加速度计信号频率各1 h。
图12 是测量出的样机差分频率数据(出于读图效果,将等精度测频法测频数据向下平移4 Hz)。将这1 h 测频数据进行10 s 滑动平均,计算出等精度测频法和连续时间标记法测得的零偏稳定性(1σ)分别为1.03 μg和1.24 μg。两种方法测量结果相近,样机常温零偏稳定性接近1 μg。

图12 加速度计样机1 h 差分频率测量Fig.12 1-hour differential frequency readout of MRA
进一步,在-40 ℃~60 ℃温度条件下,对样机零偏和标度因数的温漂进行了建模补偿实验,补偿前测得的零偏稳定性和标度因数稳定性分别为504 μg和724 ppm;利用一组测试数据建立多项式温漂模型,对另一组测试数据进行温漂补偿后,零偏稳定性和标度因数稳定性分别提升至20.6 μg和8.24 ppm,实验结果验证了上述测频方法的可行性。
5 结论
针对高采样率下硅微谐振梁加速度计的低噪声测频问题,本文介绍了等精度测频法和连续时间标记法两种基于计数法原理的测频方法,并推导了两者的功率谱密度表达式。利用信号发生器和谐振梁加速度计样机输出信号分别进行频率测量,比较了在串入4 阶低通滤波器下两种测频方法的噪声性能。实验结果表明,在不串入低通滤波器的情况下两者的测频噪声分别随测量更新率呈线性和3/2 次幂的关系,且更新率在1~1000 Hz 范围内,连续时间标记法的测量噪声更优。而在高更新率下串入低通滤波器后,两种测频方法的测频噪声相近,进一步提高更新率后测频噪声趋于常数。本文的研究成果为硅微谐梁加速度计的频率测量噪声提供了理论基础,为测频方案及低通滤波器等提供了设计参考。
猜你喜欢
中国特种设备安全(2021年5期)2021-11-06
装备制造技术(2021年2期)2021-07-21
遥测遥控(2020年3期)2020-09-17
中国惯性技术学报(2017年1期)2017-06-09
中国卫生(2016年12期)2016-11-23
光学精密工程(2016年5期)2016-11-07
新高考·高一数学(2016年3期)2016-05-19
现代计算机(2016年34期)2016-02-28
电子科技(2015年2期)2015-12-20
中国医药导报(2015年27期)2015-02-28
