低附着路面下的车辆横向控制研究
2023-11-21 07:30孙岐峰张博涵
汽车实用技术 2023年21期
孙岐峰,段 敏,张博涵
低附着路面下的车辆横向控制研究
孙岐峰1,段 敏1,张博涵2
(1.辽宁理工职业大学 汽车学院,辽宁 锦州 121007;2.辽宁工业大学 汽车与交通工程学院,辽宁 锦州 121001)
现有的横向控制技术可以保证车辆在简单环境内行驶,但在低附着系数路面环境下的行驶存在路径跟踪效果差、车辆稳定性低等现象。为解决此类问题,文章将对智能车辆横向控制展开研究。文章设计的了一种上层采用变增益模糊滑膜控制、下层采用模糊比例微分积分(PID)控制的双层横向控制算法,在增强操纵稳定性的基础上,提升智能车辆在低附着路面下的控制效果。采用MATLAB/Simulink与CarSim的联合仿真形式,选择双移线工况和定曲率工况来验证其性能。仿真结果表明,文章设计的车辆横向控制器控制的车辆路径跟踪精度高,行驶稳定性良好。
智能车辆;路径跟踪;横向控制;模糊滑膜控制;模糊PID控制
车辆的横向控制和纵向控制主导着智能车辆在行驶时的运行状态。横向控制主要负责转向轮转角与转向力矩的控制,可以保持车辆行驶状态的稳定。ATTIA等[1]基于车辆行驶速度和道路宽度设计的横摆角速度的预估值,采用鲁棒控制器对方向盘期望的横摆角速度进行控制;YE等[2]设计了一种基于模糊控制的滑膜控制器,用来解决针对无人矿车在复杂环境下的跟踪控制问题,有效提高了控制器的抗干扰能力;SABIHA等[3]基于滑膜控制器结合车辆动力学模型和滑移特性,针对滑模控制器的增益改良优化;唐坤等[4]为设计了一款基于纯跟踪(Pure Pursuit, PP)控制和模型预测控制(Model Predictive Control, MPC)的联合控制器,提高低速自动驾驶车辆在不同工况下横向跟踪控制的性能;刘延等[5]参考车辆动力学分析与辨识,基于无迹卡尔曼滤波理论,设计出一种质心侧偏角的精确计算方法,提高车辆的瞬态控制精度,改善乘用车辆的坐舒适性;熊中刚等[6]基于径向基函数(Radial Basis Function, RBF)比例微分积分(Proportion Integration Differentiation, PID)的控制方法,提升转向控制中对方波轨迹跟踪的效果,提高转向控制精度。
目前,横向控制系统一般采用单一控制器,部分控制器实用性低、控制精度不足,无法保证智能车辆在附着路面上的稳定行驶。
本文设计了一种双层横向控制器,在保证上层控制器精度的同时,兼顾下层控制器对上层信号精准的跟随,提高车辆低附着系数路面条件下的路径跟踪精度和横向稳定性。
1 车辆横向控制原理
本文研究的轨迹跟踪横向控制过程分两部分。首先,上层控制器——轨迹跟踪控制器通过分析车辆的动力学模型、轮胎模型和道路模型等,基于最优预瞄的理想横摆角速度驾驶员侧向模型,以采用合理的控制算法输出理想的方向盘转角。其输入为车辆的状态信息和规划的轨迹信息,规划轨迹信息为车辆的理想行驶道路中心线和预瞄目标点位与车辆的横向偏差,车辆状态信息为横摆角速度、侧向速度、侧向加速度以及车速等[7];输出为理想的方向盘转角。
其次,下层控制器——执行控制器负责接收来自上层控制器输出的方向盘转角,通过调节电动机的电枢电压大小控制电枢电流,进而控制转矩,然后控制转向器完成自动转向,再将实际的车轮转角、车速以及横摆角速度等反馈给上层控制器,进而完成车辆的负责接收来自上层控制器输出的方向盘转角,形成闭环控制[8]。
本文设计的智能车辆横向控制流程如图1所示。
2 横向控制数学模型
线性二自由度动力学模型可以提供侧向和横摆两个运动特性,公式为
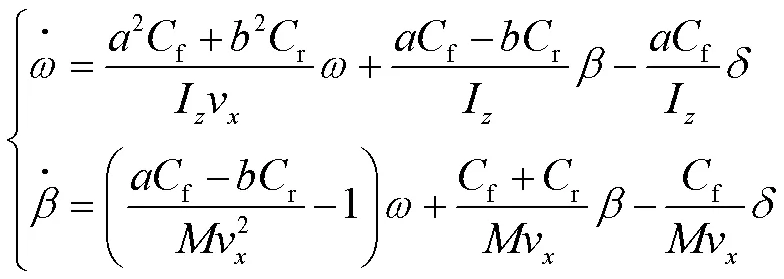
式中,为整车质量;为车辆横摆角速度;f为前轮侧偏刚度;r为后轮侧偏刚度;v为车辆行驶纵向速度;v为车辆行驶侧向速度;I为车辆质心处转动惯量;为车辆前轴到质心距离;为车辆后轴到质心距离。驾驶员模型为

式中,d为理想横摆角速度;c为理想方向盘转角;为车辆方向盘与前轮传动比;为车辆稳定性因数。
转向系统模型为
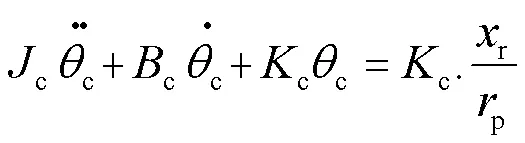
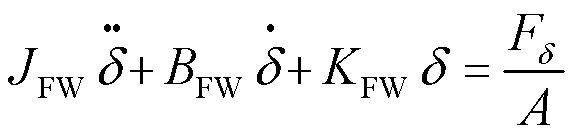

式中,c为方向盘转动惯量;c为上转向柱阻尼系数;c为上转向柱转动刚度;c为方向盘转角;r为齿条位移;p为齿轮分度圆半径;为转向轮转角;FW为转向轮绕主销的转动惯量;FW为转向轮绕主销的阻尼系数;FW为转向轮绕主销的转动刚度;F为路面等效至齿条上的阻力;为转向器至前轮之间的等效传动比;m为转向电动机转动惯量;m为转向电动机运动粘性阻尼系数;m为转向电动机转动刚度;m为电动机电磁转矩;为减速机构传动比;m为转向电动机转角;r为齿轮和齿条的等效质量;r为齿条等效阻尼系数;r为齿条等效刚度。
电机的电源是电压源作为电机的端电压,其电气方程式为

式中,m为作用在电枢的电压;m为转向电动机电枢绕组的电阻;m为转向电动机的电流;m为转向电动机电枢绕组的电感系数;f为反电动势系数。
电动机电磁转矩m与电流m的关系式为
3 横向控制器设计
3.1 上层控制器设计
本文横向控制上层控制器采用变增益模糊滑膜控制。系统跟踪误差具体表示为
本文设计的滑膜控制器切换函数为
式中,为加权系数且>0。对此切换函数求导可得

令趋近率函数为0,假设车辆做恒定横摆角速度的匀速圆周运动,则理想横摆角加速为0,所以滑膜控制的前轮转角输入可以表示为

将滑膜控制律:
根据车辆方向盘转角与前轮转角直接的传递关系,可以得到上层控制器——轨迹跟踪控制器输出的目标方向盘转角为
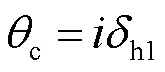
模糊控制输入切换函数和切换函数变化率d的模糊集合为{NB,NM,NS,ZO,PS,PM,PB},模糊论域为[-1.5,1.5],隶属度函数为三角函数;模糊控制的输出切换增益()的模糊集合与输入一致,模糊论域为[-1,1],隶属度函数为三角函数。其模糊控制规则如表1所示。
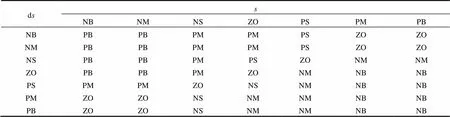
表1 模糊规则
3.2 下层控制器设计
横向控制的上层控制器采用模糊PID控制,原理如图2所示。
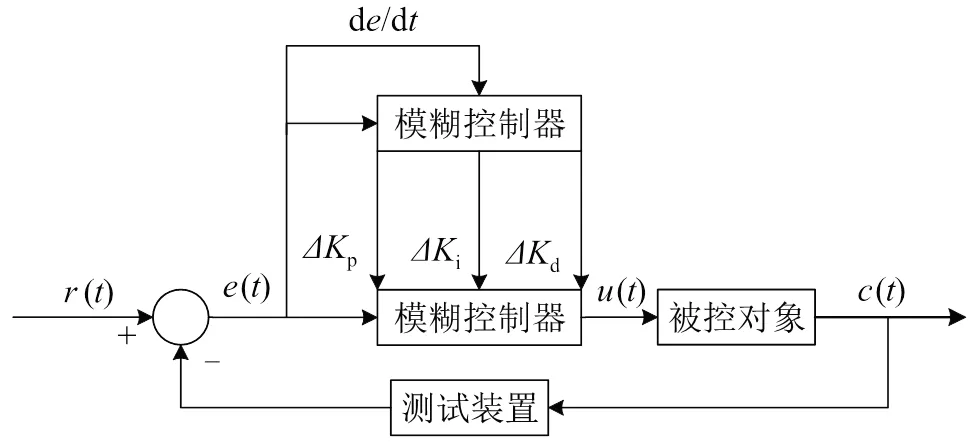
图2 模糊PID控制原理
输入变量和输出变量的模糊子集可表示为{NB,NM,NS,ZO,PS,PM,PB}。在模糊控制器之后还有保留器,上一次的p、i、d值,再加上模糊控制器的输出值得到p、i、d,相加后的数值作用于控制对象。
设输入量为误差()、误差率()、输出量p、i、d。输入输出量模糊论域都为[-6,6],隶属度选择三角形函数,如图3所示。
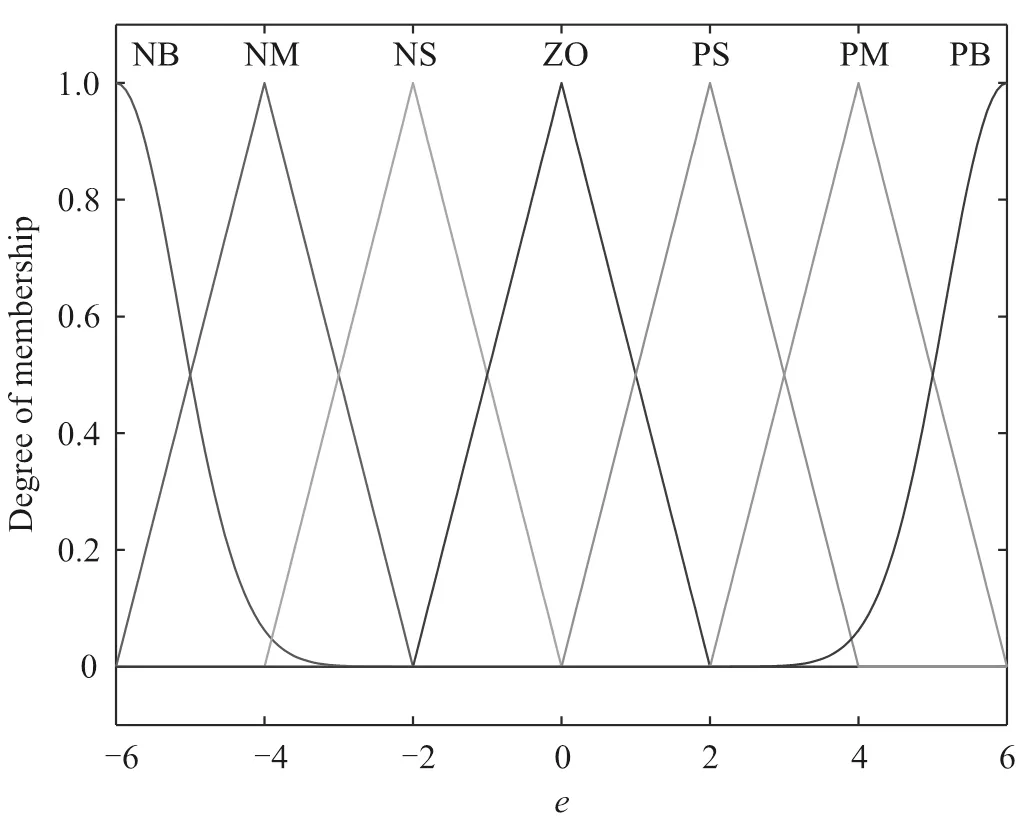
图3 模糊PID控制的隶属度函数
由于惯性补偿和摩擦对系统影响较小,忽略这两种补偿控制方法的作用,本文采用阻尼补偿控制,提高横向控制精度。
本文采用电流补偿的方式减小输出的误差,可以将转向电动机的角速度乘上电机的阻尼增益系数,最后得到补偿电流,用目标电流与补偿电流之和作为补偿后的电流,可以显著提高转向效果。
4 横向控制联合仿真
本文采用MATLAB/Simulink模型与CarSim模型联合仿真的形式,对本文设计的横向控制算法的控制效果进行验证。仿真工况设置了双移线工况和定曲率工况两种,并在不同车速下进行仿真验证。
将CarSim中的路面附着系数设置为0.2,车速为10 m/s和20 m/s,以下是仿真结果对比。通过图4可以看出,车速为10 m/s时,在附着系数为0.2的路面上行驶,无横向控制的车辆已经不能对目标路径进行跟踪。本文横向控制的车辆可以对目标路径进行跟踪,跟踪纵向误差不超过2.5 m,横向误差不超过0.4 m。
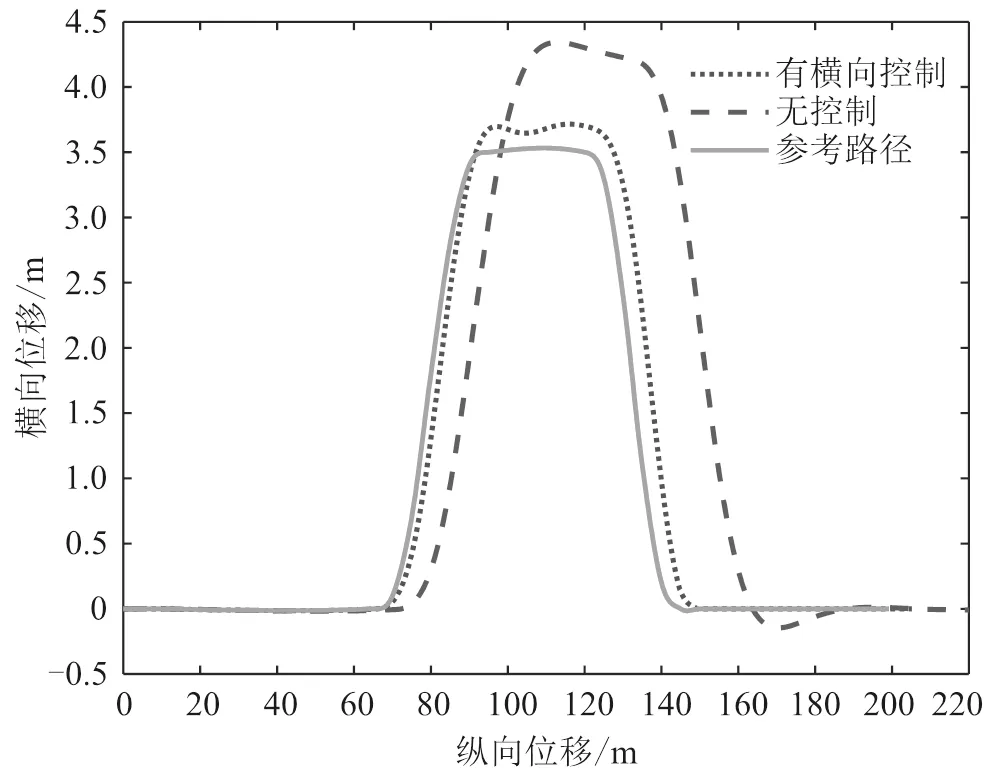
图4 车速10 m/s双移线工况下的有、无横向控制仿真对比

图5 车速20 m/s双移线工况下的有、无横向控制仿真对比
通过图5可以看出,车速为20 m/s时,在附着系数为0.2的路面上行驶,无横向控制的车辆完全丧失对目标路径进行跟踪的能力。本文横向控制的车辆仍可以对目标路径进行跟踪,跟踪纵向误差不超过10.2 m,横向误差不超过1.1 m。
选择定曲率工况验证本文设计的横向控制器稳定性。
如图6所示,在车速为10 m/s时,本文设计的横向控制器控制的车辆轨迹跟踪效果良好,跟踪误差不超过0.3 m;无横向控制的车辆对路径的跟踪误差较大,最大误差超过9.3 m。
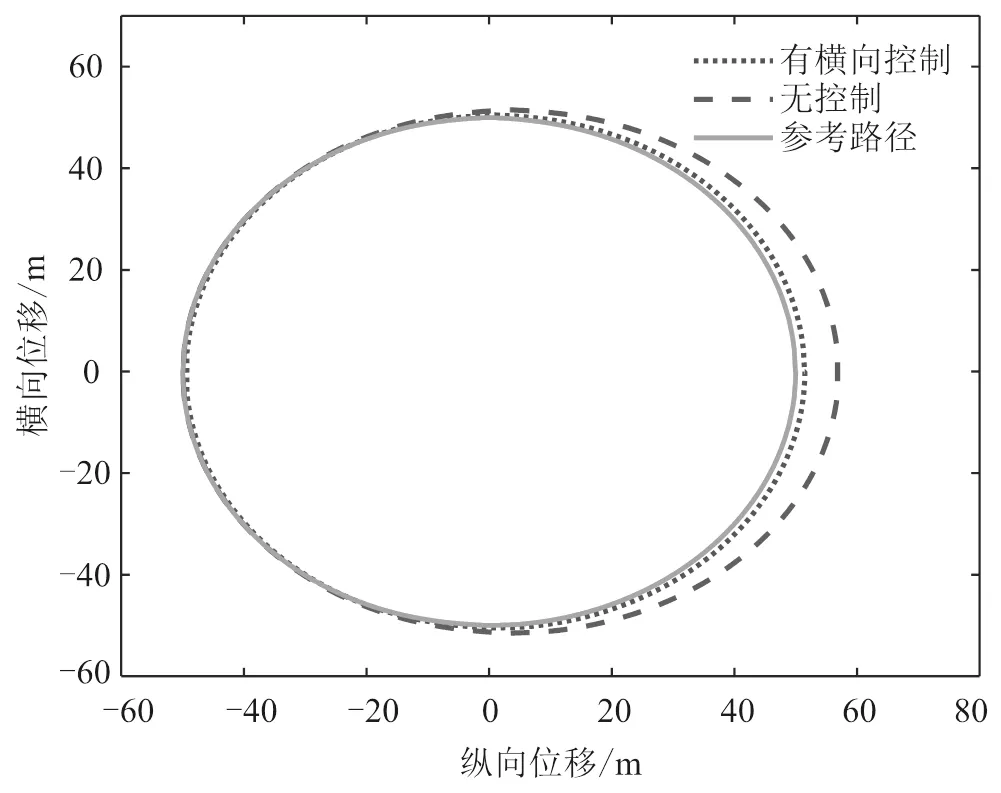
图6 车速10 m/s定曲率工况下的有、无横向控制仿真对比
如图7所示,在车速为20 m/s时,横向控制器控制的车辆实际轨迹与目标轨迹相差较大,但对目标路径的跟踪效果仍然良好。

图7 车速20 m/s定曲率工况下的有、无横向控制仿真对比
5 结论
本文针对车辆在低附着路面上跟踪精度低、行驶不稳定等问题,设计出一种双层控制方案的车辆横向控制器。上层控制器采用变增益模糊滑膜控制,可以提高对目标路径的跟踪精度,减小横向误差;下层控制器采用模糊PID控制,设计补偿控制,可以增加下层制器的信号跟随性,提高车辆的行驶稳定性。采用MATLAB/Simulink与CarSim的联合仿真,通过双移线工况和定曲率工况下的仿真验证得出:本文设计的智能车辆横向控制器控制效果显著,在低附着路面上可以对目标路径进行精准跟踪,横向误差小,具有良好的行驶稳定性。
[1] ATTIA R,BASSET M,ORJUELA R.Combined Long- itudinal and Lateral Control for Automated Vehicle Guidance[J].Vehicle System Dynamics:International Journal of Vehicle Mechanics and Mobility,2014(2): 261-279.
[2] YE W,SHEN W,QIAN Z,et al.Robust Longitudinal Motion Control of Underground Mining Electric Vehicles Based on Fuzzy Parameter Tuning Sliding Mode Controller[J].Computers & Electrical Engineer- ing,2022,98:107683.
[3] SABIHA A D,KAMEL M A,SAID E,et al.ROS-based Trajectory Tracking Control for Autonomous Tracked Vehicle Using Optimized Backstepping and Sliding Mode Control[J].Robotics and Autonomous Systems, 2022,152:104058.
[4] 唐坤,曹志雄.低速自动驾驶横向跟踪控制研究[J]. 电机与控制应用,2021,48(8):72-80,89.
[5] 刘延,周金应,徐磊,等.基于质心侧偏角计算的自动转向控制[J].重庆理工大学学报(自然科学),2021,35 (8):33-38,89.
[6] 熊中刚,刘忠,王寒迎,等.RBF神经网络增量式PID自动转向控制系统设计[J].农机化研究,2021,43(4):27- 32.
[7] 孔昕昕,邓召文,余思家,等.基于滑模控制的汽车横向预瞄驾驶员模型[J].湖北汽车工业学院学报,2020, 34(4):25-28.
[8] 张杰.基于EPS的智能纯电动汽车横向控制研究[D].合肥:合肥工业大学,2019.
Research on Vehicle Lateral Control under Low Adhesion Road Surface
SUN Qifeng1, DUAN Min1, ZHANG Bohan2
( 1.School of Automotive Engineering, Liaoning Vocational University of Technology, Jinzhou 121007, China;2.School of Automotive and Traffic Engineering, Liaoning University of Technology, Jinzhou 121001, China )
The existing lateral control technology can ensure the vehicle running in a simple environment, but the path tracking effect is poor and the vehicle stability is low in the road environment with low adhesion coefficient. In order to solve this problem, the horizontal control of intelligent vehicle will be studied in this paper. In this paper, a two-layer lateral control algorithm using fuzzy synovial film control on the upper layer and fuzzy proportion integration differentiation (PID) control on the lower layer is designed. On the basis of enhancing the handling stability, the control effect of intelligent vehicle under low adhesion road surface is improved. The co-simulation form of MATLAB/Simulink and CarSim is used to verify its performance by selecting double line shifting condition and constant curvature condition. The simulation results show that the vehicle lateral controller designed in this paper has high path tracking accuracy and good driving stability.
Intelligent vehicle; Path tracking; Lateral control; Fuzzy synovial control; Fuzzy PID control
U461
A
1671-7988(2023)21-25-05
10.16638/j.cnki.1671-7988.2023.021.006
孙岐峰(1994-),男,实验师,研究方向为新能源汽车,E-mail:sqf54005@163.com。
2022年辽宁省教育厅基本科研项目(面上项目)(LJKMZ20220976)。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
中学生数理化·七年级数学人教版(2021年9期)2021-11-20
建材发展导向(2021年14期)2021-08-23
知识经济·中国直销(2018年3期)2018-04-12
传媒评论(2017年8期)2017-11-08
解放军健康(2017年5期)2017-08-01
知识经济·中国直销(2016年2期)2016-11-07
中国组织化学与细胞化学杂志(2016年3期)2016-02-27
交通建设与管理(2015年13期)2015-03-20
汽车零部件(2014年5期)2014-11-11