基于负载变化的纯电动矿车驱动转矩优化控制策略研究
2023-11-21 07:30王愿望乔美英
汽车实用技术 2023年21期
王愿望,乔美英
基于负载变化的纯电动矿车驱动转矩优化控制策略研究
王愿望1,2,乔美英1
(1.河南理工大学 电气工程与自动化学院,河南 焦作 454000;2.郑州宇通矿用装备有限公司,河南 郑州 450001)
针对常规驱动控制策略无法应对纯电动矿车负载变化大、电机输出转矩不能准确表达驾驶员驾驶意图的问题,文章以模糊控制理论为基础,设计了一种转矩优化控制策略。首先将纯电动矿车的需求转矩分为基准转矩和动态补偿转矩两部分,通过加速踏板开度、电机转速、负载质量确定纯电动矿车的基准转矩,动态补偿转矩是以模糊控制理论为基础的驾驶意图模糊控制器的输出,模糊控制器的输入为期望车速与实际车速的偏差和踏板开度变化率,纯电动矿车的实际需求转矩为基准转矩和动态补偿转矩的和。在MATLAB/Simulink中建立纯电动矿车驱动控制策略仿真模型,通过优化控制策略与传统控制策略的仿真对比结果表明,优化转矩控制策略能够有效适应纯电矿用车负载变化大、准确识别驾驶员的驾驶意图,提升车辆的动力性。
纯电动矿车;驾驶意图;转矩优化;模糊控制;补偿转矩
随着全球能源危机加剧,人们环保意识逐步增强,纯电动矿车相对于传统矿车具有噪声低、效率高、无污染等优势,具有广阔的市场前景。在理论上,电动机的转矩和转速控制精度都优于发动机,而良好的驱动控制策略更能够充分发挥电动机转矩响应快的特点,使纯电动矿车能够充分适应整车负载变化大、快速响应驾驶员的驾驶意图。针对车辆在加速过程中可能存在的电机输出转矩不足而不能准确表达驾驶员驾驶意图的问题,文献[1]设计了一种驾驶意图系数模糊控制器,使车辆在不同的加速模式之间切换,提升了车辆的经济性和动力性;文献[2]基于模糊控制理论,将车辆加速模式分为急加速模式和一般加速模式,并利用模糊控制器进行不同程度的加速转矩补偿,有效提高了车辆的动力性能;文献[3]提出了一种基于模糊控制的转矩控制策略,在基准转矩的基础上增加了动态补偿转矩,提高了车辆在加速过程中的动力性能。
基于上述问题和研究结果,本文提出了一种基于模糊控制理论的转矩优化控制策略,将纯电动矿车的需求转矩分为基准转矩和动态补偿转矩两部分之和。为减小负载变化对纯电动矿用车驱动转矩的影响,通过加速踏板开度、电机转速、负载质量确定纯电动矿车的基准转矩;为准确表达驾驶员的驾驶意图,设计基于模糊控制理论的驾驶意图模糊控制器,模糊控制器的输出为动态补偿转矩,输入为车速偏差和加速踏板开度变化率。在MATLAB/Simulink中的模型仿真结果表明:驱动转矩优化控制策略能够有效应对纯电动矿用车负载变化大,电机输出转矩也能准确表达驾驶员驾驶意图,提升了纯电动矿车的动力性。
1 基准转矩控制策略
1.1 纯电矿用车动力学模型
根据纯电动矿用车的传动系统结构可知,纯电动矿车在正常行驶过程中的驱动力t是由驱动电机转矩经过传动系统传递到车轮上[4],车轮在运动过程中,还要克服外部阻力,其主要包括:滚动阻力f、空气阻力w、爬坡阻力i、加速阻力j。
由此可知纯电动矿用车的动力学表达式为

式中,t为车辆自身驱动力;∑为所有阻力的综合。
滚动阻力是有轮胎的迟滞作用导致的,整车所受的滚动阻力表达式为

式中,为车辆质量;2为车辆负载质量;为重力加速度;为滚动阻力系数,它取决于多方面因素,基于纯电矿用车的运营环境,本文取参考值0.019;为路面坡度角。
空气阻力是车辆相对于空气运动时空气作用力在车辆行驶方向形成的分力,其与车辆速度r的平方成正比,一般表达式为
式中,D为空气阻力系数,一般取值范围为0.30~0.41,本文取经验值0.35;为空气密度,一般=1.225 8 N.s2.m-4;为迎风面积。
式(3)中,r的单位是m/s,若将其换算成km/h,空气阻力还可以表示为
坡道阻力是纯电动矿用车在坡道上行驶时,车辆自身重力沿坡道的分力,其表达式为

加速阻力是车辆在加速行驶时必须克服的其质量加速运动时的惯性力,其值等于车辆加速度与自身质量的乘积。而车辆的质量又分为旋转质量和平移质量两部分,为便于计算,可通过车辆旋转质量换算系数,将旋转质量产生的惯性力转换为平移质量产生的惯性力进行处理[5],因此j可表示为
式中,为车辆旋转质量换算系数,一般取值大于1,针对纯电矿用车,本文取值为1.04。
纯电动矿车在正常行驶过程中的驱动力t是由驱动电机转矩经过传动系统传递到车轮上得到的,其受力示意图如图1所示。
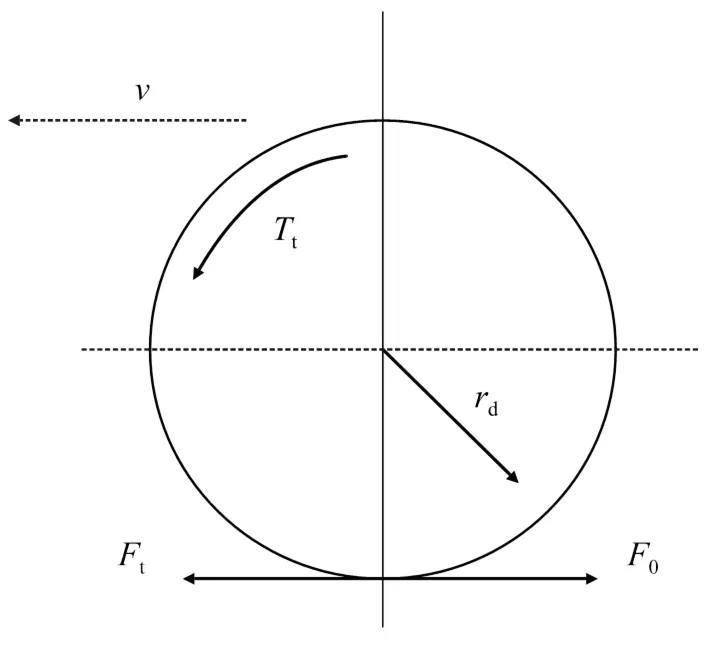
图1 车辆驱动轮受力示意图
根据力的平衡关系式可知:
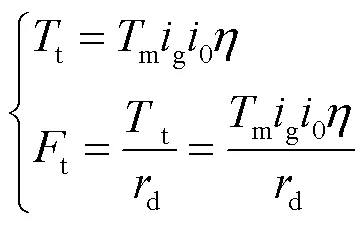
式中,m为电动机转矩;g为两挡变速器传动比;0为主减速器传动比;为传动效率;d为车轮半径。
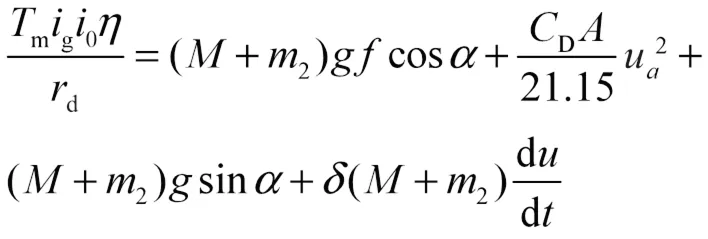
由此可知纯电动矿车在正常行驶过程中的动力学表达式为
1.2 车辆需求转矩解析
在纯电动矿车正常行驶的过程中,整车控制器(Vehicle Control Unit, VCU)会根据车辆当前的输入信号,对车辆的当前需求转矩进行解析,其数学表达式为

式中,q为车辆的需求转矩;为车辆加速踏板开度;D为车辆加速踏板开度变化率;m为车辆当前总质量;Brake表示车辆制动信号;m为电机转速;t为车辆当前车速。
在纯电动矿用车正常启动且加速踏板有效后,即进入正常驱动行驶模式,此时驱动电机的输出转矩和加速踏板开度的关系可以通过电机转矩负荷系数来描述,定义电机转矩负荷系数t和加速踏板开度的关系如下:
转矩负荷系数与加速踏板开度一般有3种函数关系:硬踏板控制策略(上凸型)、软踏板控制策略(下凹型)、线性踏板控制策略,具体如图2所示。为兼顾纯电矿用车的动力性和经济性,本文选用线性踏板控制策略,即
式中,k为加速踏板开度。
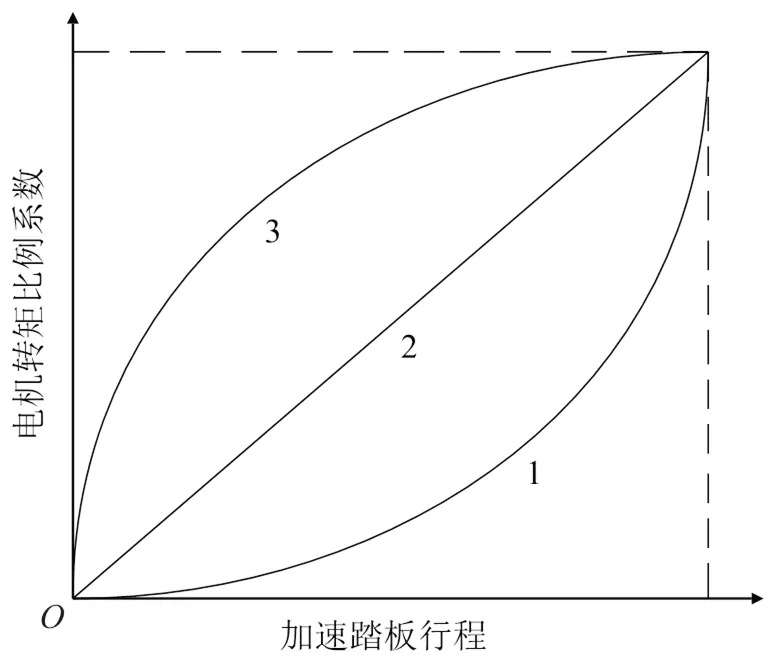
图2 转矩符合系数与加速踏板开度关系图
当车辆处于非静止状态时,由式(8)可知,车辆会有一个保持当前工况下安全行驶所需的最小转矩min,从而知车辆的需求转矩q与电动机特性和加速踏板开度的关系为

式中,max为电动机所能提供的最大驱动转矩;brk为制动力转矩。
根据电机的外特性曲线(图3)知,电机最大输出转矩表达式为
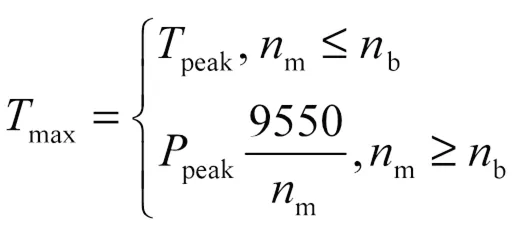
式中,peak为电动机峰值转矩;peak为电动机峰值功率;m为电动机实时转速;b为电动机额定转速。
图3 电动机外特性图
根据式(8)、式(11)-式(13),控制策略中可以用查表法,通过加速踏板开度、电机转速、负载质量确定纯电动矿用车的基准转矩[6],如图4所示。
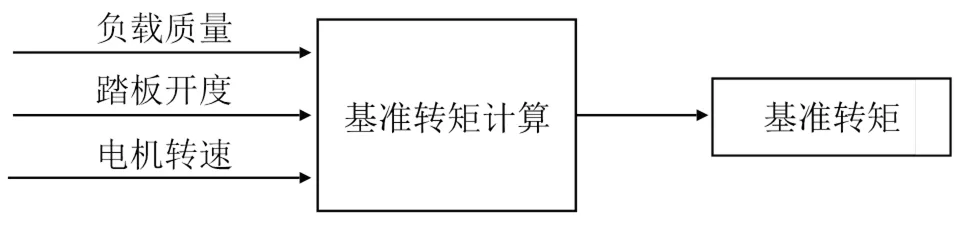
图4 基准转矩算法图
2 优化转矩控制策略
纯电矿用车驱动转矩优化控制策略是在车辆基准转矩(线控驱动转矩)的基础上增加了动态补偿转矩,对驱动电机的输出转矩进行补偿和优化,使驱动车辆的电机输出转矩能够更加准确、快速响应驾驶员的驾驶需求。动态补偿转矩是通过期望车速与车辆当前实际车速的偏差和加速踏板开度变化率为输入变量的基于模糊控制理论的驾驶员意图控制器计算得到的,是对基准转矩的一种补偿,控制算法架构如图5所示。

图5 动态补偿转矩算法图
2.1 驾驶员的期望车速
定义驾驶员的期望车速为某一加速踏板开度下,车辆行驶在稳定工况(平坦路面、匀速行驶、负载稳定)下的稳定车速。在这一稳定的车速下,电机输出转矩稳定,驾驶员加速踏板开度的大小就直接反映了驾驶员对车辆平稳运行时速度的期望,期望车速与加速踏板的开度一一对应,与车辆当前车速无关。
由(8)式可知纯电矿用车在稳定工况下的运动学方程为

式中,exp为期望车速。
从而得

2.1.1 车速偏差
车速偏差Δ是驾驶员期望车速exp和车辆当前行驶车速之间的差值,在车辆加速行驶阶段,其大小是反映驾驶员加速意图的强烈程度的要素之一,车速偏差越大,说明驾驶员的加速意图越强烈。可以根据式(15)制定纯电矿用车的期望车速MAP表,使期望车速与加速踏板开度一一对应,整车控制策略通过查表法得到期望车速。
2.2 转矩补偿分析
由于在纯电矿用车线性驱动转矩的基础上增加了动态补偿转矩,可能会引起纯电矿用车驱动转矩的突变,从而影响驾驶员的驾驶体验和驾驶感受[7-8]。车辆的舒适性可以用冲击度来评价,因此在确定动态补偿转矩的最大值时,要充分考虑冲击度的限制。冲击度的定义是加速度变化率,由牛顿第二定律可知
由(16)式可得冲击度的表达式为

将(17)式变化可得
车辆冲击度依据国际通用的德国冲击度限制标准:≤10 m.s-3,以电机的理论响应时间为20 ms进行计算,将表1的纯电矿用车整车相关参数带入式(18)中,计算出纯电矿用车的动态补偿转矩Δ的最大值为163 N.m。
2.3 模糊控制器设计
动态补偿转矩的大小由反映驾驶员驾驶意图的车速偏差和加速踏板开度变化率共同决定,但动态补偿转矩、车速偏差、加速踏板开度变化率三者之间的关系并不能用准确的数学函数表达式来表达,对于这种相互之间不明确的变量关系通常采用模糊控制理论来进行研究。基于上述分析,设计以动态补偿转矩为输出变量、以期望车速与车辆当前实际车速的偏差和加速踏板开度变化率为输入变量的驾驶员驾驶意图模糊控制器,其中动态补偿转矩的论域为[−163,163];车速偏差的论域为[−40,40];加速踏板开度变化率的论域为[−100,100];模糊子集均为{负大,负中,负小,0,正小,正中,正大},表示为{NB,NM,NS,0,PS,PM,PB};输入输出变量均采用三角形和梯形结合的隶属度函数,如图6所示。
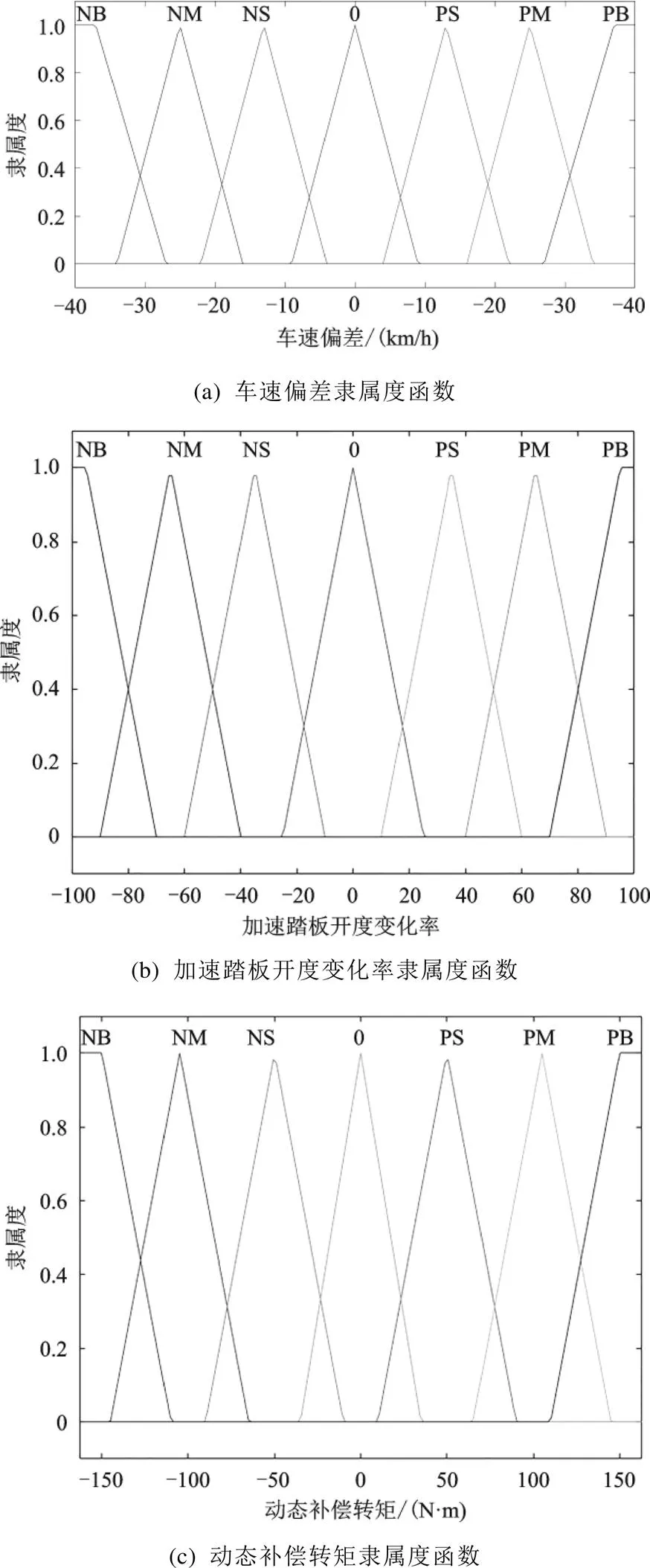
图6 驾驶意图模糊控制器
模糊控制规则采用if(a)and(b)then(c)的形式,根据驾驶员的驾驶意图,制定如表2所示的模糊规则表。
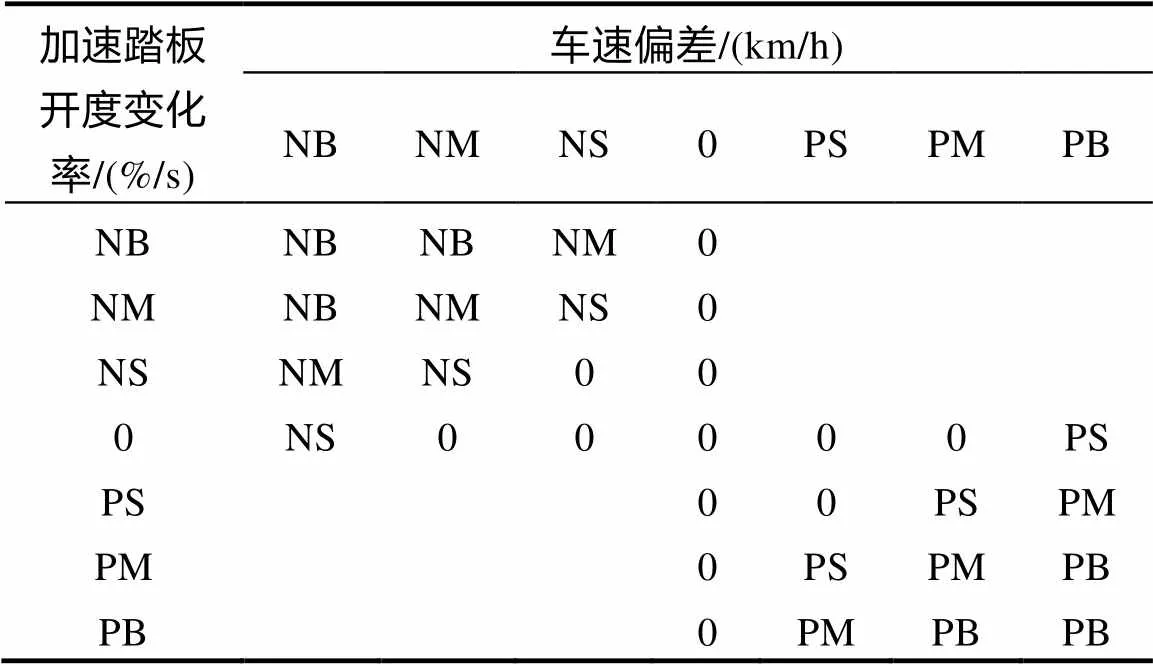
表2 模糊规则表
根据上表所制定的模糊控制规则,得出动态补偿转矩的模糊控制规则曲面,如图7所示。
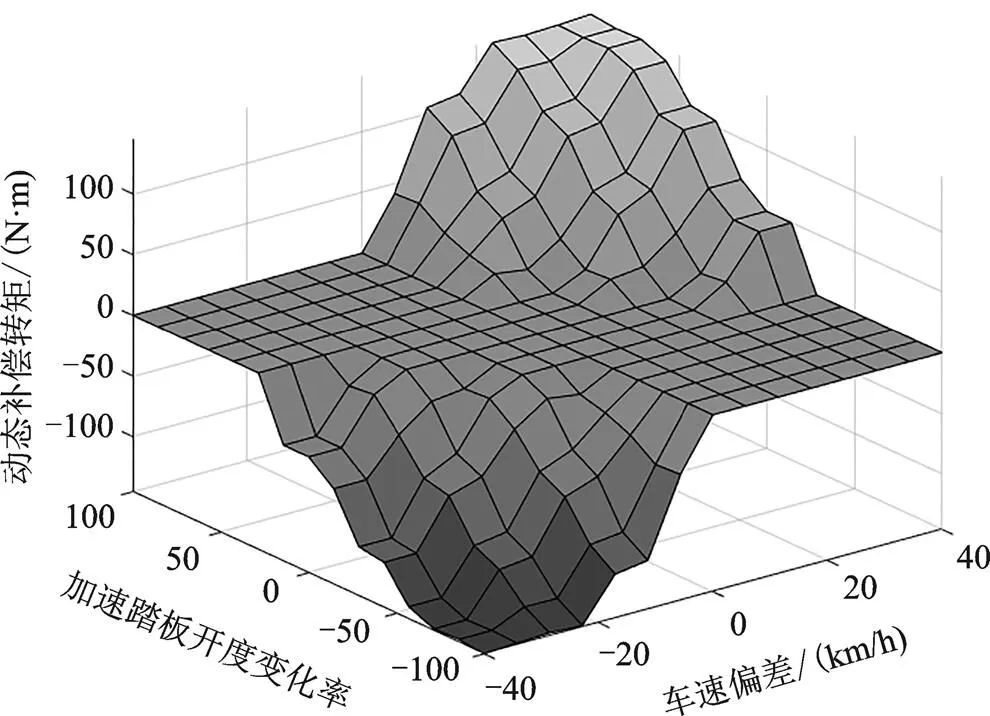
图7 动态补偿转矩模糊控制规则曲面
2.4 优化转矩控制策略架构
根据纯电矿用车的基准转矩和动态补偿转矩控制策略搭建整车驱动转矩优化控制策略,策略架构如图8所示。
从图8可以看出:优化转矩控制策略会根据纯电矿用车当前各种传感器和执行器的输入信号,求出当前工况下车辆的基准转矩,实时动态补偿转矩则依据驾驶员驾驶意图模糊控制器制定的模糊控制推理方法推理计算所得。VCU下发的纯电矿用车的实际需求转矩为基准转矩值与动态补偿转矩值之和,但需要考虑电动机在当前条件下的最大转矩的限制,需求转矩不能超出电动机所能提供的最大转矩。
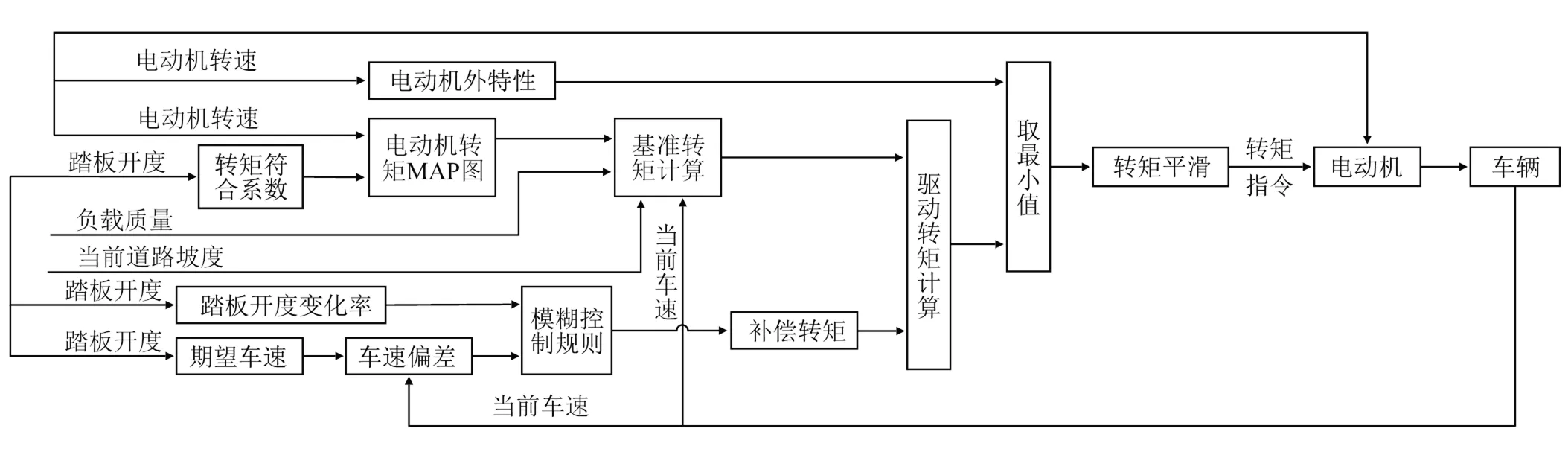
图8 优化转矩控制策略架构
3 控制策略仿真分析
根据表1的整车基本参数和图9的优化转矩控制策略架构,在MATLAB/Simulink中建立纯电动矿车的整车仿真模型[9],通过设置不同的加速踏板开度模型和负载质量来验证优化转矩控制策略的合理性和有效性。
仿真表3和表4的仿真分析结果表明:1)负载越高,电机输出扭矩越大,验证了优化转矩控制策略可以有效适应纯电矿用车负载变化;2)通过传统控制方法与优化控制方法仿真结果的对比分析,可以看出优化控制方法的电机转矩响应速度更快,加速时间更短,验证了优化控制策略对电机转矩的补偿效果。
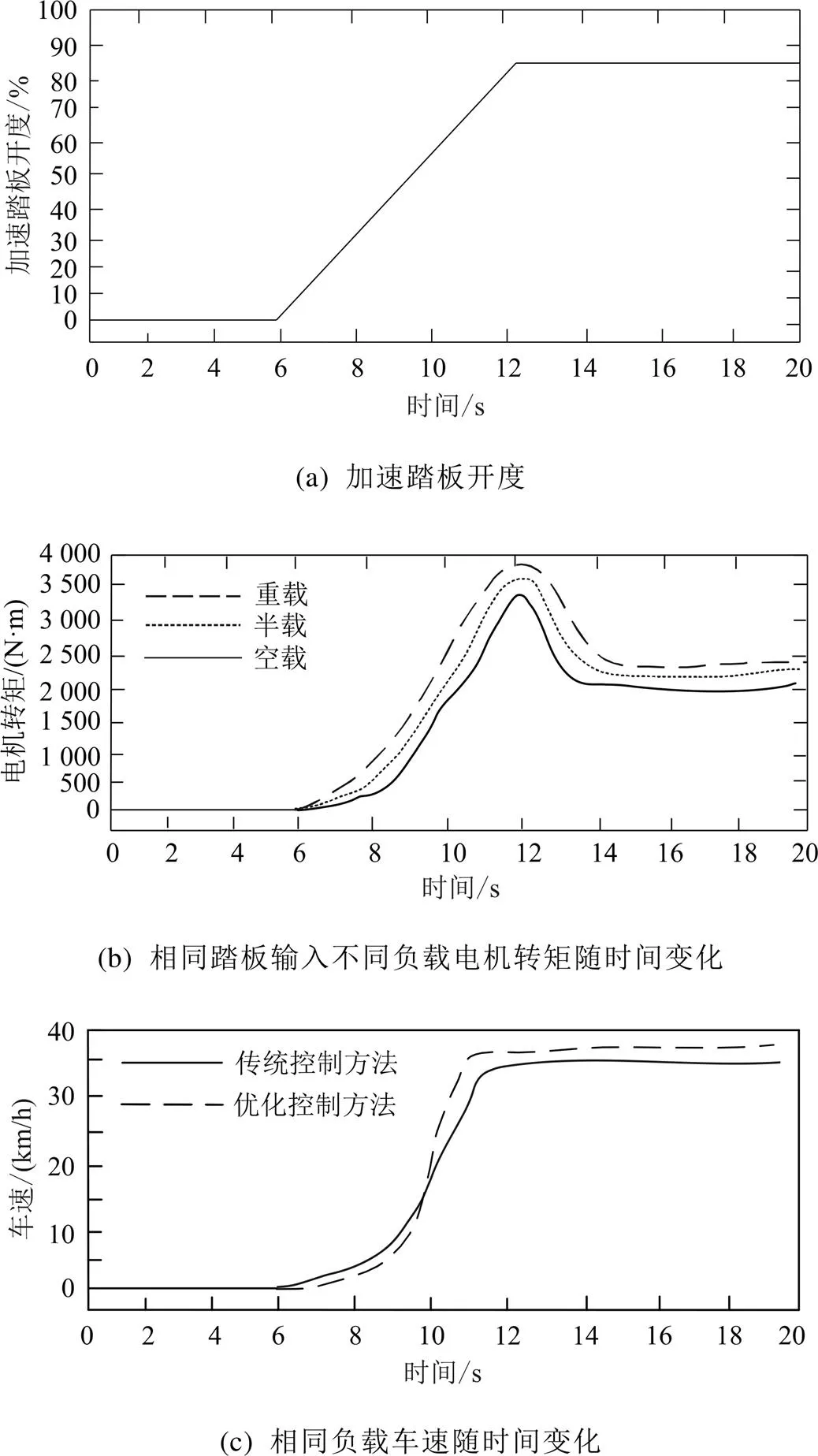
图9 工况1仿真结果

表3 工况1:0~30 km•h-1加速时间对比

表4 工况2:0~30 km•h-1加速时间对比
4 结论
针对纯电动矿车负载变化较大、电机输出转矩不能准确表达驾驶员驾驶意图的问题,设计了一种纯电动矿车优化转矩驱动控制策略,通过加入控制策略前后的仿真结果对比表明,优化转矩控制策略能够有效适应纯电矿用车负载变化、快速准确识别驾驶员的驾驶意图,从而使电机输出转矩较快达到加速踏板所对应的需求扭矩。
[1] 马晓楠,吉春宇,韦尚军,等.纯电动汽车加速过程的转矩优化控制策略[J].汽车实用技术,2021,46(4):1-5,13.
[2] 徐凯,牛志刚.纯电动汽车加速转矩控制优化策略[J].机械设计与制造,2016(9):50-53.
[3] 王善超,吉春宇,覃记荣,等.纯电动汽车加速过程转矩优化策略[J].装备制造技术,2020(3):14-18.
[4] 张金成,王陶,王良模,等.纯电动汽车坡道行驶驱动转矩优化控制策略[J].江苏大学学报(自然科学版), 2021,42(5):506-512.
[5] 刘翔皓.电动汽车整车控制策略的研究与设计[D].南京:南京理工大学,2019.
[6] 王程玉,林慕义,吴柯桐,等.负载变化对纯电动货车驱动控制策略的影响[J].机械设计与制造,2022(2): 148-151.
[7] 徐飞,梁缘,李丹林,等.基于模糊逻辑的电动汽车驾驶意图设计及应用[J].汽车科技,2017(2):18-22.
[8] 邓元望,郑潮雄,曾俊,等.纯电动汽车转矩动力性能优化控制研究[J].计算机仿真,2017,34(1):132-137.
[9] 郑锦汤,刘开,李玉忠.纯电动汽车加速转矩补偿控制策略及硬件在环测试[J].国外电子测量技术,2021,40 (7):164-169.
Research on Driving Torque Optimization Control Strategy of Pure Electric Mine Car Based on Load Variation
WANG Yuanwang1,2, QIAO Meiying1
( 1.School of Electrical Engineering and Automation, Henan Polytechnic University, Jiaozuo 454000, China;2.Zhengzhou Yutong Mining Equipment Company Limited, Zhengzhou 450001, China )
Aiming at the problem that the conventional drive control strategy cannot cope with the load variation of pure electric mine car and the motor output torque cannot accurately express the driver's driving intention, this paper designs a torque optimization control strategy based on the fuzzy control theory. Firstly, the demand torque of pure electric mine car is divided into two parts: benchmark torque and dynamic compensation torque. The benchmark torque of pure electric mine car is determined by acceleration pedal opening, motor speed and load weight.The dynamic compensation torque is the output of driving intention fuzzy controller based on fuzzy control theory. The input of fuzzy controller is the deviation between expected speed and actual speed and the change rate of pedal opening. The actual demand torque of pure electric mine car is the sum of benchmark torque and dynamic compensation torque. The simulation model of driving control strategy of pure electric mine car is established in MATLAB/Simulink. The simulation results of optimized control strategy and traditional control strategy show that the optimized torque control strategy can effectively adapt to the load change of pure electric mine car, accurately identify the driver's driving intention, and improve the vehicle's power.
Pure electric mine car;Driving intention; Torque optimization; Fuzzy control; Compensating torque
U469.7
A
1671-7988(2023)21-36-07
10.16638/j.cnki.1671-7988.2023.021.008
王愿望(1994-),男,硕士研究生,助理工程师,研究方向为电工电能新技术,E-mail:2447507040@qq.com。
猜你喜欢
车主之友(2022年6期)2023-01-30
科学与财富(2021年33期)2021-05-10
北京汽车(2021年2期)2021-05-07
电站辅机(2021年4期)2021-03-29
作文大王·低年级(2020年2期)2020-03-13
机械管理开发(2020年1期)2020-02-17
黄河之声(2019年23期)2019-12-17
汽车实用技术(2019年17期)2019-09-21
幽默大师(2019年5期)2019-05-14
黄河之声(2017年13期)2017-01-28