
控制红薯叶旺长的智能装置
2023-11-23 10:47湖南省汨罗市第二中学陈耀星周添一郭骐嘉黄佳豪
发明与创新 2023年34期
◆湖南省汨罗市第二中学 陈耀星 周添一 郭骐嘉 黄佳豪

图/图虫创意
“中国有条汨罗江,江边有个红薯乡。”其中的“红薯乡”就是汨罗市桃林寺镇。这里的人们利用得天独厚的红土地,大力发展红薯深加工产业,提高农产品附加值,拓宽了增收的渠道,开启了“致富之门”。放假或课余时间,我们在红薯地里翻藤时了解到:红薯叶子旺长会使土壤肥力下降,遏制根茎的膨大,使红薯的单产减少。
于是,我们想发明一种控制红薯叶旺长的智能装置。当监测到红薯藤蔓分枝增多、叶片覆满时,装置能自动将藤蔓往上提起,使其侧根脱离土壤,不影响光合效能,从而抑制藤叶旺长,使薯块膨大,产量增加。
在本次探究中,黄佳豪负责做科学实验。陈耀星负责设计和制作装置。郭骐嘉主要负责查阅、收集、整理文献资料,撰写查新报告。周添一主要负责咨询专家、购买器材、组装并调试装置。
一、设计思路
通过图像识别传感器监测红薯叶的生长情况。当监测到红薯叶开始旺长时,单片机将收到的数据加工后,发送指令让伺服电机启动机械手工作,然后通过无线通信模块传输给手机App。
无线远程监控单元具备在线现场监控的所有功能,用户通过手机App或电脑实时查看红薯叶的疏密度、长势等情况,还能根据不同的红薯品种,分别设置工作参数。
二、装置组件
硬件包括5 个模块,即红薯叶疏密度监测与控制模块、机械手的抓藤工作及力度控制模块、液晶显示及界面操作模块、无线通信模块、装置移动模块。
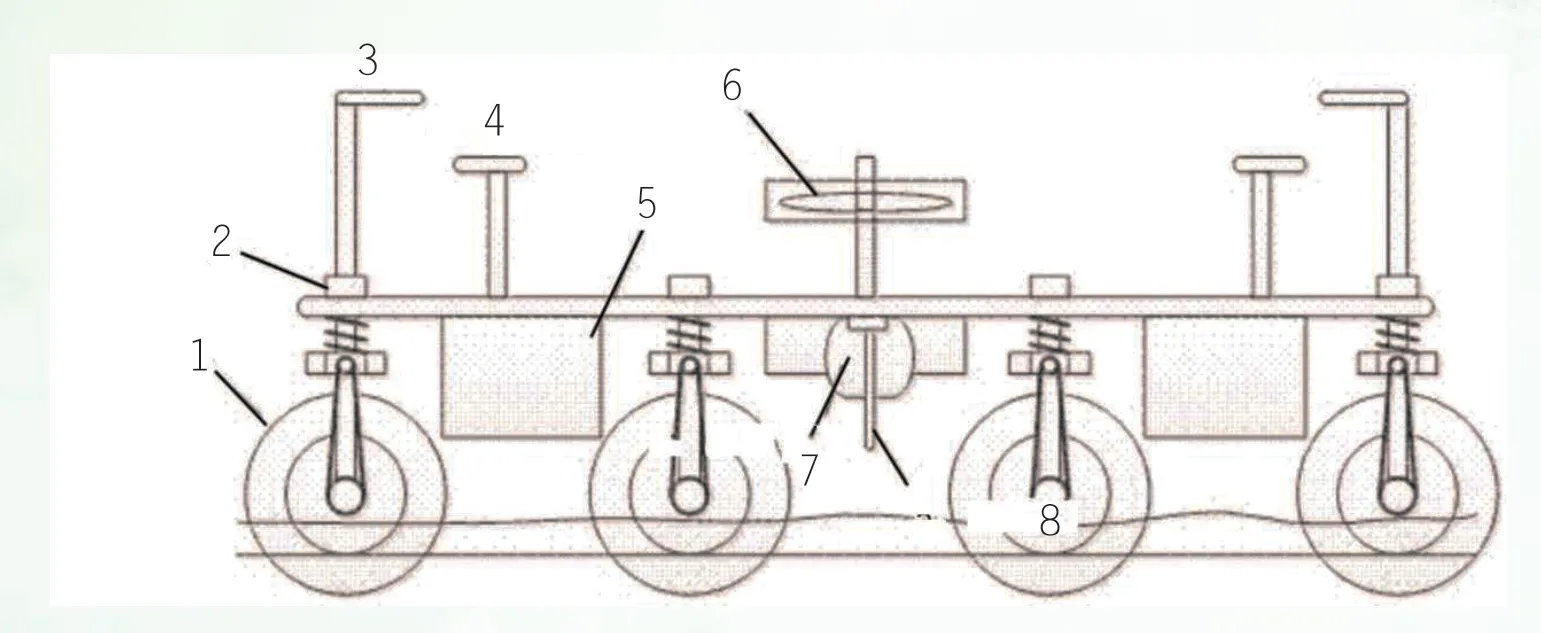
图1 结构图

图2 工作流程图
需要的配件有太阳能电池组件、控制器、机械手、继电器组、摄像头、伺服电机、地磁传感器、图像识别传感器、视觉传感器、Wi-Fi 模块、OLED液晶显示器、单片机、红外对管、云服务器、双向数据无线传送模块。
软件包括控制代码、手机App 远程控制程序等。
三、工作原理
用Prote199 软件设计一块印刷电路板,将单片机、OLED 液晶显示器、开关等弱电部分全部焊接在该电路板上。单片机负责收集信息,综合判断并发出控制指令。图像识别传感器对红薯叶疏密度进行监测,当高于设定值时,通过单片机控制机械手抓藤。
视觉传感器捕获图像,并将其与存储的基准图像进行比较分析。若视觉传感器被设定为红薯茎可见,判为叶疏;若传感器感知红薯茎不可见,则判为叶密。
叶面积仪测定红薯叶的面积,根据监测结果计算出叶面积指数。如果超出设定值,单片机就可据此对伺服电机下达工作指令。

图3 陈耀星(上)、周添一(下)修改作品零部件
现场监控系统和无线远程监控可将红薯叶疏密度的实时状况直观地显示在液晶屏上。
程序采用C 语言,基于Keil 编译环境。开发的App 基于手机安卓平台,根据设定红薯叶疏密度参数,通过该App 可远程实时监控装置对红薯叶的抓藤情况。
四、测试过程
利用叶片图像分析仪扫描红薯藤旺长情况,记录每行红薯藤的坐标,同时反馈给单片机进行处理。在扫描过程中,光线穿透叶片的表面,反射出不同程度的光波,经过光学透镜成像后,形成具有特定灰度值的图像。
通过图像处理技术,我们可以识别叶片表面的轮廓、密度等详细信息,并将其转换成数字形式,通过软件进行处理和分析,最后形成高清图像。
设计机械手,使它实现抓放以及上下移动。编写与机械手相关的18 个串口对应的参数。编写机械手工作代码,利用DMA 控制程序,使其按照设计要求工作。申请一个BMP文件的内存,将机械手的运算值转换成对应的BMP文件,并存储到SD 卡中。设计每隔5秒机械手“抓—放”工作的循环程序。
把上述子程序打包汇总到一个程序中,反复调试,直到装置能成功运行。

图4 测试控制红薯叶旺长的智能装置
五、创新点
(一)设置图像识别传感器监测红薯叶的疏密度,单片机与步进电机、传感器相互配合,控制装置边移动边抓藤。
(二)通过App 实现远程无线实时监测红薯的生长情况,并根据设定的疏密度,自动进行抓藤,减轻农户的劳动量。农户能随时随地观察红薯的生长情况,并实时掌控装置自动抓藤,抑制侧根生长,提高红薯产量。
作者心声
陈耀星:我在制作抓藤机械手的过程中,先将其整体悬挂在桁架上,一端悬挂于横向模组上,另一端有手腕和手指,手腕可多个自由度旋转,手指可以抓放红薯藤。接着安排三个伺服电机:一个控制前后移动的抓藤机械手,一个控制机械手横向抓藤,一个则控制机械手上下移动。
最难的是如何实现机械臂的自动抓取、放下的建模。机械臂由多个元器件构成,主要包括可视化系统、传动系统、执行器和控制系统。可视化系统通常是一个三维立体显示器,用于显示机械臂的位置和运动轨迹。传动系统由驱动器、减速机、传动带和传动链构成。执行器主要由夹具、气动夹具、真空吸盘、机械手和机械手套构成。把这些零配件一一买来组装再进行调试,过程十分曲折,也将平时学的动力机械与计算机知识进行了一次系统的融合训练,动手又动脑,收获满满。
黄佳豪:我负责的控制系统比较棘手。在购置了元器件后,根据设计图连接,结果并未实现机械臂在空间内的任意旋转、抓放!我懊恼极了。经过反复琢磨、多次修改设计方案才发现,原来是父链节点的运动影响了子链节点相对运动。我想,如果最终能找到一个符合要求的姿态,那么一定要满足所有父链节点与末端节点的连线均指向目标点!接着我就赶紧进行实验,当我第五次完成每个节点旋转后,起始端与末端节点的连线分毫不差地指向目标点!我高兴极了。
在多次失败之后,我依托电子学及机械运动原理,通过机械手控制每个自由度的电机完成了既定动作。同时,机械手接收传感器反馈的信息,形成稳定的闭环控制,圆满实现了设定的各种功能。

图5 作者与指导老师曾尚文(中)在第九届全国青年科普创新实验暨作品大赛湖南赛区现场合影
专家点评
控制红薯叶旺长的智能装置是一个富有前瞻性的发明项目。
常言道,“民族要复兴,乡村必振兴”。只有把饭碗牢牢端在自己的手里,才能应对各种风险挑战并赢得主动。目前,我国农业发展正处于由追求数量向追求质量转变的关键时期,用人工智能等方式,把绿色、低碳的理念贯穿于乡村振兴的各个环节,很有必要。这个项目的出现,充分体现几位同学已具备一定的创新视野与创新能力,同时,它将引发一系列相关农业方面人工智能原创性作品的诞生。
值得指出的是,这个项目只是一个雏形,离实际的生产应用还有很长的路要走。这是因为在红薯的生长中,就“控旺”这一个环节,不仅有提蔓这道工序,常规的还有翻秧、打尖、化学控旺等。
希望这几位同学在提升各学科核心素养的同时,继续探究,努力成长为红薯现代化生产领域的拔尖创新人才。
猜你喜欢
青少年科技博览(中学版)(2023年5期)2023-06-26
今日农业(2021年17期)2021-11-26
微特电机(2020年11期)2020-12-30
海峡姐妹(2019年11期)2019-12-23
学与玩(2018年5期)2019-01-21
电子制作(2018年17期)2018-09-28
通信电源技术(2018年3期)2018-06-26
工业设计(2016年6期)2016-04-17
通信电源技术(2016年1期)2016-04-16
机电信息(2015年3期)2015-02-27
