大中型城镇排水泵站电动机无功补偿设计
2023-11-25 07:27郭文会
广东水利水电 2023年11期
郭文会
(中山市水利水电勘测设计咨询有限公司,广东 中山 528403)
1 概述
交流异步电机具有结构简单、制造容易、价格低廉、运行可靠、维护方便、坚固耐用等一系列优点。并且有较高的运行效率和较好的工作特性,从空载到满载范围内接近恒速运行,能满足大多数工农业生产机械的传动要求。大中型城镇排水泵站水泵配套电动机额定电压多为10 kV,额定功率为250~2 500 kW,额定功率因数一般为0.64~0.85[1-3],电动机额定转速越低,额定功率因数越低。
异步电动机消耗大量无功负荷造成许多不利影响:① 挤占变配电系统的有效容量;② 增加输配电线路损耗;③ 电动机端电压明显下降,影响电能质量;④ 增加变压器的损耗;⑤ 增加用电费。根据《供电营业规则》,大、中型电力排灌站功率因数要求不应低于0.85,但地方供电部门往往要求考核点功率因数为0.9以上,因此排水泵站安装异步电动机时,均需进行无功功率补偿,以提高功率因数,降低能耗,改善电网电压质量,满足供电部门考核和节能要求[4-5]。
大中型城镇排水泵站,无功补偿装置可选用SVG、SVC、TSC、TCR+TSC、并联电容器[6-8]等,其中采用并联电容器进行无功补偿是较为经济、可靠的补偿方案,仅以节约电费的计算,0.5—3年可回收补偿设备投资,在市政和水利工程中得到广泛使用。
2 电容器补偿方式的选择
在选择电容器补偿方式时应做到系统合理,节省投资,控制、管理方便。城镇排水泵站电容器无功补偿方式分集中补偿、单机就地补偿两种[9]。
集中补偿:电容器组集中设置电动机电压母线上。优点是集中补偿装置设有控制器,其具有无功功率控制、功率因数控制、无功电流控制、电压控制、按特定负荷控制多种控制模式,可根据系统无功功率的变化,完成补偿电容器的投入、切除、跟踪负荷的变化做到最佳的补偿效果。可分组自动投切电容器数量,调整补偿容量,避免过补偿或欠补偿,便于运行维护,补偿效益高。缺点是集中补偿装置的分组数、分组容量组合较难确定,需要按照排水泵机组运行台数、电动机负载率情况组成不同运行工况,分别计算确定总补偿容量、分组数量、分组容量,计算所需要考虑的工况组合较多;无功补偿装置故障后,无法进行无功功率补偿,同时也会失去无功补偿提升泵站电动机母线电压的作用,可能影响泵站机组的正常运行。另外,集中补偿方式需要设置无功补偿装置高压出线柜、微机保护装置、无功补偿自动控制装置,增加相应设备投资。
单机就地补偿:对每台排水泵电动机进行单独补偿,无功补偿安装在电动机控制柜出线侧。优点是接线简单、灵活、投资少,任一机组电动机无功补偿装置故障,不影响其他机组正常运行。缺点是无法进行补偿容量调节,并应特别注意无功补偿容量,不应引起电动机自激现象。
当电动机采用软启动装置起动时,单机就地补偿装置与电动机软起动装置接线应注意配合,选用正确的接线方案。图1中(A)接线方案错误,不可采用。原因是:在机组停机时,断路器QF分断,但电动机还没有停下来,补偿电容就会给电动机提供超前的无功电流,使电动机变成发电机,此时电动机是空载发电,发出的电没有消耗的通路,形成很高的空载电压(该电压与电容器提供的电流大小、电动机的转速有关),该电压会损坏软起动装置,特别是大惯性负载更加危险。(B)(C)方案接线正确。机组开机时应先合闸断路器QF,待机组起动完成,旁路接触器KM1投入后,再闭合接触器KM2,以免电容投入时涌流,损毁固态软启动器。机组停机时,应在断开断路器QF的同时断开接触器KM2,或者在断开断路器QF前先断开接触器KM2,否则,接线方式将与(A)接线相同,可能出现类似问题。

图1 单机就地补偿装置、软启动装置配合接线示意
3 无功补偿容量计算
3.1 满足目标功率因数要求的补偿容量
城镇排水泵站主水泵电动机选型时,按水泵可能出现的最大轴功率并留有1.05~1.20的储备系数选型[10]。一般最高扬程时,水泵轴功率最大,水泵配套电动机按此工况选型,但泵站最低、平均、设计扬程工况下,水泵轴功率均较小,电动机长期处于轻载或低负载率运行。据笔者调查多宗大中型城镇排水泵站,主水泵电动机负载率长期在40%~70%之间,甚至更低,均需要进行无功补偿,按满足目标功率因数要求,需要的无功补偿容量计算公式如下:
Qbx=P/η×[tg(cos-1Φ1)-tg(cos-1Φ2)]×N
(1)
式中:
Qbx——需要的无功补偿容量,kvar;
P——电动机的输出功率,kW;
η——相应输出功率时电动机的效率;
Φ1——补偿前的功率因数角;
Φ2——补偿后的功率因数角;
N——机组台数。
由交流异步电动机工作特性曲线,可知电动机运行功率因数随着负载率降低而减小,低负载率时功率因数较额定值下降较多。以往的设计,一般仅按电动机额定值计算无功补偿容量进行补偿,当电动机轻载工况下运行时,可能不能满足无功补偿要求。可对电动机在不同负载率时,需要的无功补偿容量进行分别计算,然后采用Excel绘图功能中多项式曲线拟合法,得到需要的无功补偿容量曲线。
3.2 单机就地补偿最大补偿容量
采用单机就地补偿时,为了防止产生自激过电压,单机补偿容量不应过大,依据《供配电系统设计规范》[11]第6.0.11条规定:“接在电动机控制设备侧电容器的额定电流,不应超过电动机励磁电流的0.9倍”。计算公式如下:
(2)
式中:
Qb_max——单机就地补偿最大补偿容量,kvar;
UN——电动机的额定电压,kV;
I0——电动机的空载电流,A。
电动机的空载电流应按电动机生产厂家资料值。当未能取得厂家确切数据时,可按以下3种方法进行估算[12],待后期得到准确数据后再进行核验。
① 根据经验数据估算法,一般情况下I0=20%~50%×IN[6],电动机极数越多,额定功率因数值越小,最大转矩与额定转矩之比越大,电动机空载电流越大。
②I0=2IN(1-cosΦN)
(3)

(4)
式中:
IN——电动机的额定电流,A;
cosΦN——电动机的额定功率因数值;
B——最大转矩与额定转矩之比,一般可取1.8~2.2。
4 无功补偿装置实际输出无功容量
无功补偿装置生产厂家一般是按照其内电容器安装容量来标称设备的无功输出容量,实际输出无功容量,受到电容器实际运行电压与其额定电压的差异、串联电抗器的无功损耗、串联电抗器后电容器端电压升高等因素的影响,计及影响后其实际输出无功容量[13]计算公式如下:
(5)
式中:
Qb——实际输出容量,kvar;
Ug——接入点电压,kV;
Uce——电容器的额定电压,kV;
Qce——电容器的额定容量,kvar;
A——串联电抗器电抗率,%;
Kb——输出容量系数,%。
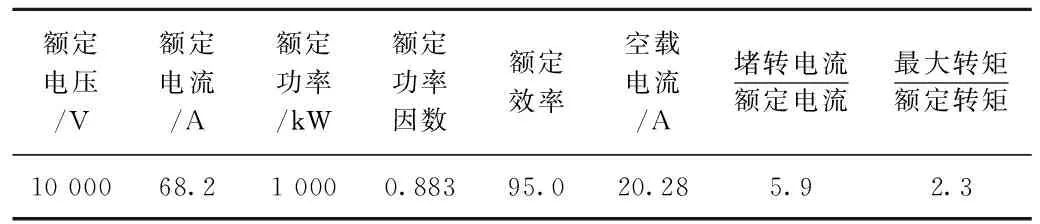
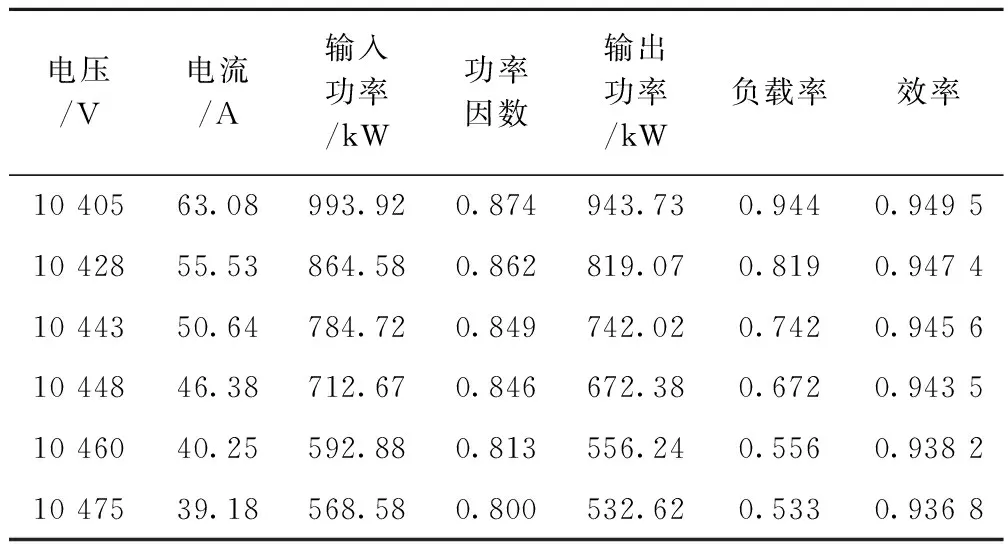
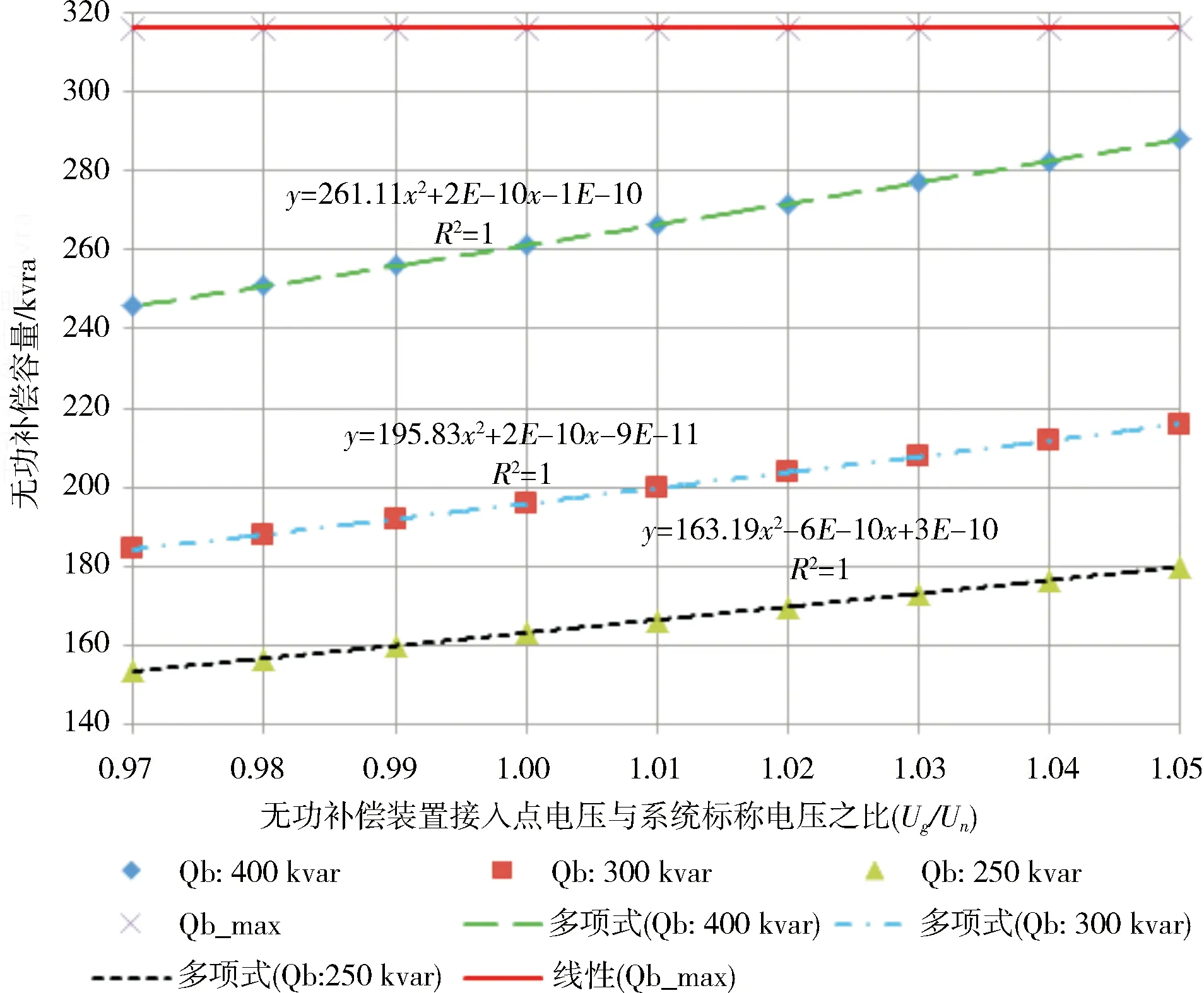
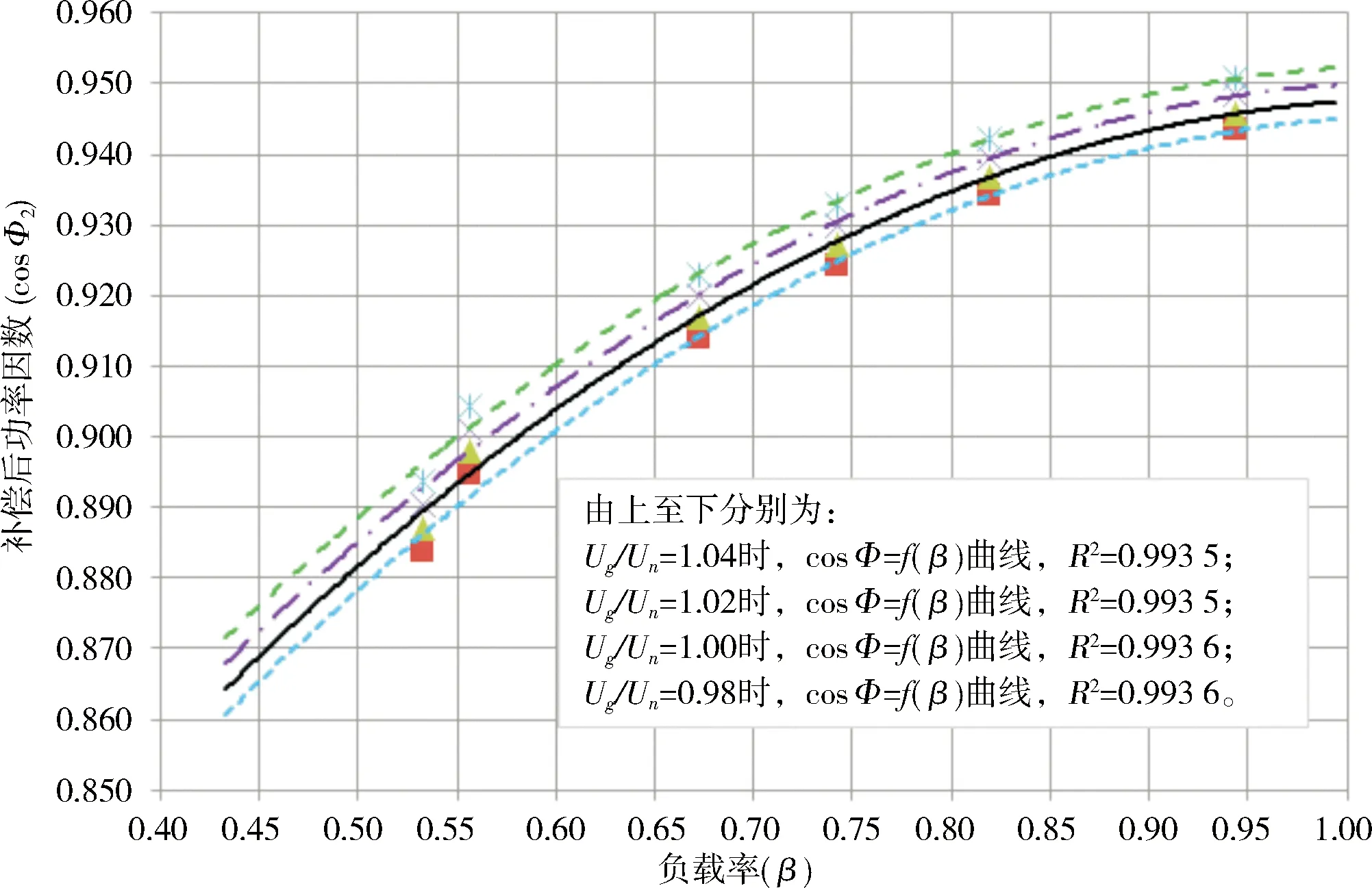
无功补偿装置实际输出无功容量应小于不引起电动机自激励条件下的最大容量,并应大于满足功率因数目标值所需要的最小补偿容量,即需要满足Qbx≤Qb 工程实际中,一般情况下,无功补偿装置中电容器额定电压选1.1或1.2倍系统标称电压(Un),串联电抗器电抗率为A=6%[14-15]。根据式(5)计算得无功补偿装置的输出容量系数(Kb)见图2。分析图中数据可以看出Ug/Uce在0.97~1.05范围内变化,当Uce/Un=1.1时,Kb=82.7%~96.9%,当Uce/Un=1.2时,Kb=69.5%~81.4%。无功补偿装置实际输出无功容量与其内电容器安装容量存在较大偏差,在选择无功补偿装置时,应特别注意两者之间的区别,以免出现欠补偿,功率因数不达要求的问题。 图2 无功补偿装置的输出容量系数曲线 中山市白石涌外排泵站设计排涝流量为135 m3/s,泵站设计扬程为2.0 m,最高扬程为3.10 m,最低扬程为1.0 m,安装6台2650GZBW型潜水贯流泵,水泵配套电动机型号为YQGN990-6P型,在不同扬程工况下运行,水泵电动机负载率在0.45~1.00范围内变化。水泵电动机基本数据见表1,负载特性试验数据见表2。 表1 电动机基本数据 表2 电动机负载特性试验数据 泵站由地区110 kV变电站引接两路10 kV电源供电,泵站不设变压器,仅设配电母线,泵站10 kV主接线采用两路电源进线单母线不分段接线。变电站至泵站10 kV供电电缆线路长度约1.5 km,电能计量点设在泵站处,功率因数要求不低于0.9,无功功率补偿采用单机就地补偿方案。 1)按电动机不发生自激条件,计算单机最大补偿容量 按本文第3节的3种方式估算的电动机空载电流分别为: a)I0=(0.2~0.5)×68.2=13.64~27.28 A b)I0=2×68.2×(1-0.883)=15.96 A 根据厂家试验数据,YQGN990-6P型电动机空载电流约为额定电流的29.7%,与经验数据估算值基本一致。 2)按满足目标功率因数要求条件 按补偿后功率达到0.90以上的目标,拟对无功补偿装置中,电容器额定容量分别为250 kvar、300 kvar、400 kvar的3个方案进行比选,电容器额定电压均为12 kV,串联电抗器电抗率均为6%。 根据电动机负载特性试验数据,采用EXCEL绘图功能中多项式曲线拟合法,对电动机负载率在0.45~1.0范围内变化,无功补偿装置接入点电压(电动机母线电压)与系统标称电压(电动机额定电压)之比(Ug/Un)在0.98~1.04范围内变化时,3个方案无功补偿装置实际输出无功容量曲线,补偿前、后功率因数曲线进行计算,分析补偿效果。 图3为水泵电动机负载率(β)在0.45~1.0范围内变化时电动机功率因数(cosΦ1)曲线;图4为Ug/Un=0.98~1.04时,3个方案无功补偿装置的实际输出无功容量(Qb);不引起电动机自激的最大补偿容量(Qb_max);图5、图6、图7分别为β=0.45~1.0,Ug/Un=0.98~1.04时,3个方案无功补偿后的功率因数(cosΦ2)曲线。 图3 水泵电动机负载率β=0.45~1.0时,补偿前功率因数曲线 图4 无功补偿装置接入点电压—实际输出无功容量曲线 图5 无功补偿装置(400 kvar)补偿后功率因数曲线示意 图6 无功补偿装置(300 kvar)补偿后功率因数曲线 图7 无功补偿装置(250 kvar)补偿后功率因数曲线 分析图3可知,电动机负载率β=0.45~1.0时,电动机功率因数(即补偿前功率因数)cosΦ1=0.773~0.877,低负载率时功率因数较低。 分析图4可知,Ug/Un在0.98~1.04范围内变化,无功补偿装置内的电容器额定容量为400 kvar(方案1)时,实际输出无功容量Qb=245.68~287.88 kvar;电容器额定容量为300 kvar(方案2)时,Qb=184.26~215.91 kvar;电容器额定容量为250 kvar(方案3)时,Qb=153.55~179.92 kvar,均小于电动机不发生自激的最大补偿容量Qb_max=316.20 kvar,采用这3种补偿方案均不会电动机自激现象。 分析图5可知,方案1β=0.45~1.0,Ug/Un=0.98~1.04时,cosΦ2=0.89~0.97,基本满足目标值不小于0.9的要求。 分析图6可知,方案2 β=0.45~1.0,Ug/U=0.98~1.04时,cosΦ2=0.86~0.95,不能满足目标值不小于0.9的要求;但β=0.6~1.0,Ug/Un=0.98~1.04范围内变化时,基本满足目标值不小于0.9的要求。 分析图7可知,方案3β=0.45~1.0,Ug/U=0.98~1.04时,cosΦ2=0.85~0.94,不能满足目标值不小于0.9的要求;但β=0.6~1.0,Ug/Un=1.0~1.04时,基本满足目标值不小于0.9的要求。 综合以上分析,方案1的水泵电动机负载率、电动机母线电压,在一定范围内变化情况下,补偿后功率因数均满足要求,补偿效果较好,满足长期在低负载率工况下运行要求。β=0.45~1.0,Ug/Un=0.98~1.04的区间内变化时,均能满足补偿后功率因数不小于0.9的要求,符合水泵电动机负载率β=0.45~1.0范围内长期运行的实际情况。 大中型城镇排水泵站电动机选用高压异步电动机时,按电动机额定值进行无功补偿,存在电动机低负载率运行工况下欠补偿问题,可根据电动机负载试验数据或负载特性曲线,采用EXCEL绘图功能中多项式非线性拟合法,得到电动机负载率、电动机母线电压在一定范围内变化情况下,无功补偿装置实际输出无功容量曲线,补偿前、后功率因数补偿曲线,进行补偿效果分析,方法简单实用。另外,无功补偿装置的实际输出无功容量与安装的电容器额定容量有较大的差别,在工程设计时应特别注意。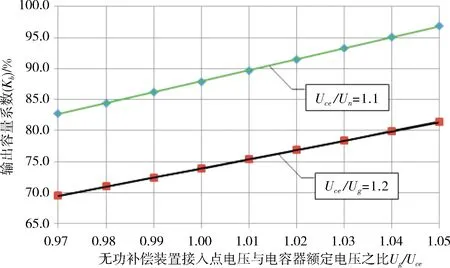
5 实例分析




6 结语
猜你喜欢
物理之友(2020年12期)2020-07-16
电子制作(2019年22期)2020-01-14
山东冶金(2019年5期)2019-11-16
测控技术(2018年9期)2018-11-25
中国交通信息化(2018年12期)2018-03-21
水利规划与设计(2018年1期)2018-01-31
中华建设(2017年1期)2017-06-07
电子制作(2016年1期)2016-11-07
通信电源技术(2016年6期)2016-04-20
通信电源技术(2016年5期)2016-03-22