一种神经网络的舰船目标噪声提取和分类技术
2023-12-04 06:38吴建军
舰船科学技术 2023年20期
孙 航,吴建军,李 林
(开封大学,河南 开封 475000)
0 引言
随着现代各类电子信息技术的快速发展,船舶的部分噪声辐射有所降低,因此对船舶目标的噪声提取以及识别分类显示更加重要[1]。舰船在航行过程中,由于其装载的机械设备在不停的运转,因此必定会向四面八方传播各类噪声,并且这些噪声通过水和空气传播到很远的地方。若被远处的水听器接收到,则这些噪声变成海洋中目标识别的干扰源之一[2]。当前世界各国对舰船的低噪声发展越来越重视,因此导致船舶目标噪声的判断与识别变得越来越难,仅仅依靠人工判断很难满足现阶段的需求[3]。本文基于神经网络技术,研究船舶目标噪声的提取和分类技术,这有助于船舶噪声识别技术的发展。
1 神经网络技术
1.1 卷积神经网络技术
现代科学技术的进步促进了深度学习技术的发展。深度学习的相关理论技术已经得到了广泛的应用,例如多目标分类[4]。为了降低整个神经网络的计算量,提升卷积运算的效率,卷积神经网络在卷积过程中为每个卷积运算核都提供权值共享,这样可以降低整个卷积神经网络中的参数量。卷积神经网络在进行多维图像处理的过程中,可以对图像直接进行卷积运算,这样可以省略图像特征提取以及数据重构的过程[5]。卷积神经网络凭借着自身强大的特征提取以及学习能力,使得其对图像的识别具备平移不变性,其结构如图1 所示。
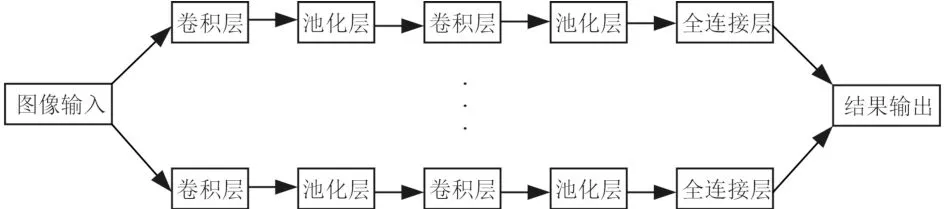
图1 卷积神经网络整体结构Fig.1 The overall structure of convolutional neural networks
利用卷积层,卷积神经网络能够对输入图像进行特征提取,最终得到图像的特征图。卷积神经网络中卷积核权重的优化学习过程叫做卷积神经网络的训练,一般利用反向传播算法对卷积核权重进行优化。卷积层的算法如下式:
在整个卷积神经网络运算过程中池化层具有十分重要的作用。池化层能够确保图像的局部特征不会发生形变。平均池化和最大池化是卷积神经网络中最常用的2 种池化操作。卷积神经网络的池化算法如下式:
在卷积神经网络中需要将所有二维图像的特征值整合成一维的图像特征值,然后通过全连接层以及激活函数的响应可以得到整个卷积神经网络中全连接层的输出,如下式:
式中,bl为偏置项。
1.2 神经网络学习过程
在正向传播过程中,神经网络需要将误差信息按照原有的链路传送回去,并且利用调整神经元权重值的方法,不断向神经网络的输入层进行传递并计算,接着执行正向传播过程,通过反复使用正反2 个传播过程,不断降低误差的数值,最终获得期望的数值[6]。隐层输出的算法和输出层的输出函数算法分别如下式:
在反向传播过程中,需要对前一层的权重值进行优化,神经网络中权值的调整量计算方法和权重值的调整方法分别如下式:
由于传统的神经网络学习方法的收敛时间比较长,针对传统神经网络学习方法的缺陷,可以采用附加动量以及可变学习速度的方法进行调整,其权值调整公式为:
采用可变学习的方法也可以达到提升收敛速度的目的,如果迭代之后的误差降低,则下次迭代的步长增大。可变学习方法的权值修正方法如下式:
式中:η为学习步长,是一个固定数。针对固定学习步长的缺点,可以采用变步长的学习方法,将学习步长看成一个可以变化的量,学习步长的修正方法和误差变化率的计算方法分别如下式:
2 舰船目标噪声建模仿真分析
舰船在海上航行过程中,由于船上机械设备的运动以及舰船自身的航行运动,因此会以舰船为中心向四周传播噪声,水中产生的噪声可以成为目标信号。接收到的目标噪声是多种噪声合成的结果,包括机械振动、螺旋桨旋转、海水流动等。其中螺旋桨在正常旋转过程中,叶片的尖端的线速度能够达到数十米每秒,螺旋桨叶片的振动噪声满足下式:
经过大量的经验测量发现,可以采用一个正弦函数来模拟低频线谱,如下式:
式中:fi为频率;ai为幅值;ϕi为相位。舰船噪声低频线谱波形如图2 所示,可以看出,归一化之后的幅值范围为-0.4~0.4。
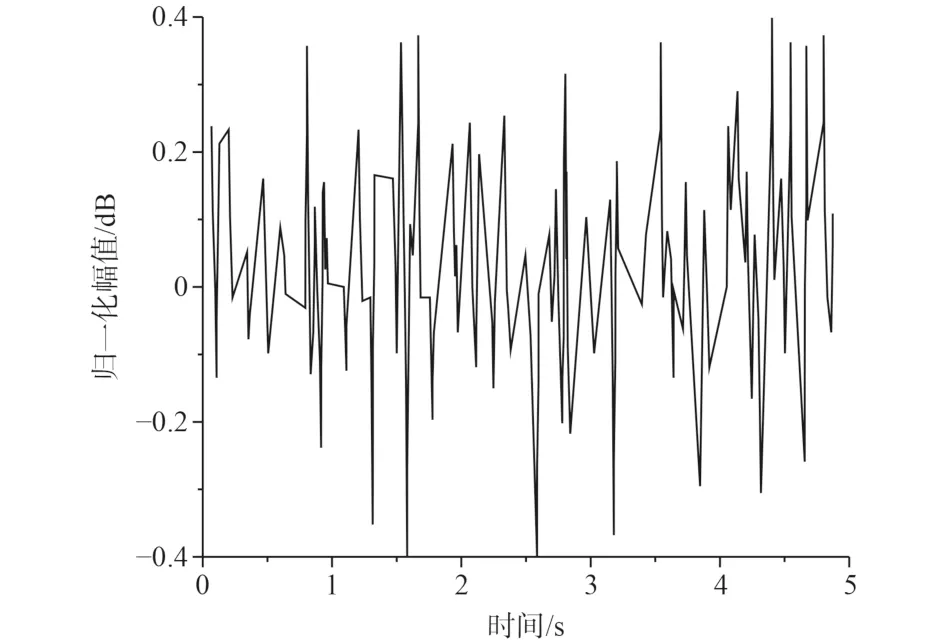
图2 舰船噪声低频线谱波形Fig.2 Low frequency line spectrum waveform of ship noise
为了能够进行连续谱的仿真,则需要将螺旋桨噪声经过一个FIR 滤波器,滤波后可以得到连续分量的噪声。使用巴特沃斯滤波进行FIR 滤波,该滤波器的频率响应曲线如图3 所示。经过调制的船舶目标噪声的时域曲线的表达式如下式:
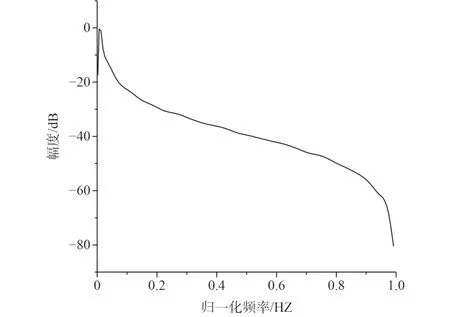
图3 滤波器频率响应曲线Fig.3 Filter frequency response curve
式中:l(t)为线谱分量;a(t)为调制信号;c(t)为连续谱信号。船舶目标噪声中包含了连续谱和窄带宽线谱2 种频谱,在进行仿真时,将带内信噪比和海洋噪声进行叠加。带内信噪比的求解方法,如下式:
海洋噪声功率如图4 所示。
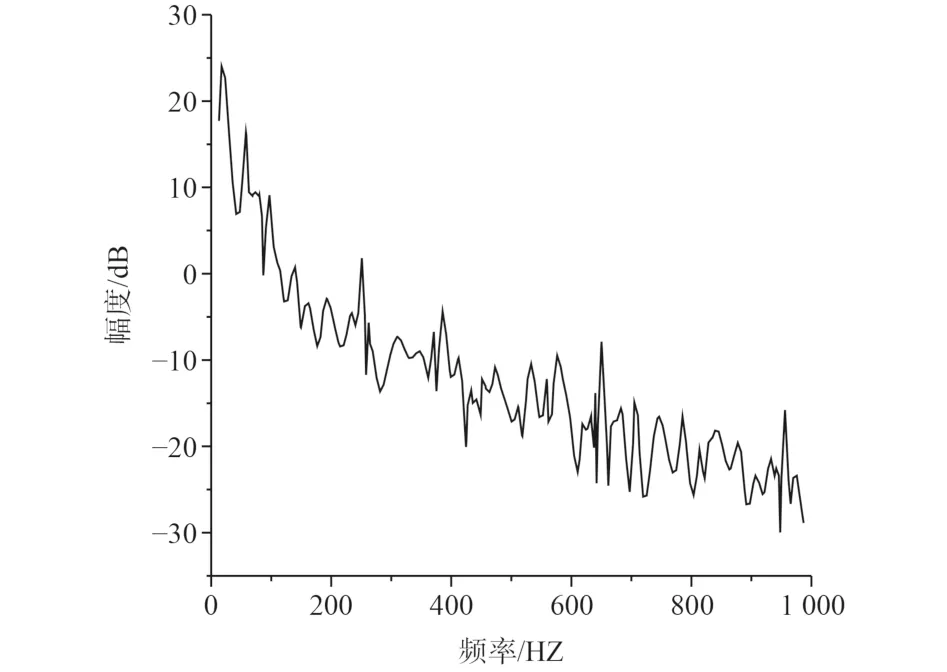
图4 海洋噪声功率谱Fig.4 Ocean noise power spectrum
通过舰船目标噪声的产生原理可以得知,线谱主要有2 种,一种是和船舶螺旋桨转速相关的,另一种是和船舶螺旋桨转速无关的,因此该线谱只能靠实际测量的经验值进行估算,所以本文在仿真过程中采用理想模型来表示该线谱。本文仿真采用的线谱基频为31 Hz,谐波分量分别为62 Hz、93 Hz、124 Hz,采样频率为4 800 Hz,仿真得到曲线如图5 所示。
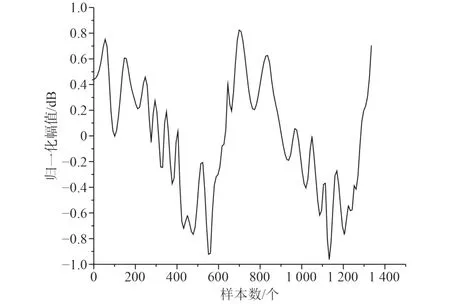
图5 线谱信号波形曲线Fig.5 Line spectrum signal waveform curve
3 舰船目标噪声提取及分类
3.1 舰船目标噪声提取
从人耳的感觉来看,船舶目标噪声的频率和音调之间的关系是成正比例关系的,但是本质上音调和频率之间并不是正比例关系,因此采用Mel 频率来描述人耳接收到的船舶目标噪声的非线性特性,Mel 频率和实际频率之间的关系如下式:
曲线关系如图6 所示。
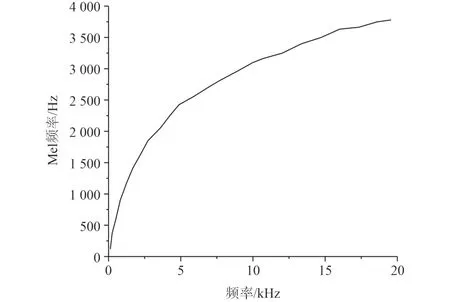
图6 Mel 频率和实际频率之间的曲线关系Fig.6 Curve relationship between Mel frequency and actual frequency
因为舰船目标噪声的频谱主要存在于2 500 Hz 以下的低频段,因此对1.5~23.5EBR 之间的频段进行噪声特征响应的提取,通过该方法可以获得221 维的船舶目标噪声特性响度的特征值,接着利用PCA 方法可以找到主要的特征,最终可以达到提取主要特征的目的。本文对海上航行舰船产生的噪声进行响应特征提取,分析的目标样本数为6 000 点,最终获得了83 个样本的特征值。舰船目标噪声特征响应度曲线如图7所示,可以看出,噪声特征响度峰值出现了100 Hz 频带附近。舰船目标噪声特征值大小曲线如图8 所示,可以看出,船舶目标噪声的响度特征大部分集中于20 维之前,并且90%以上集中在前10 维。
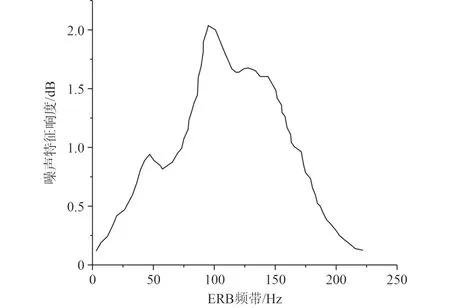
图7 舰船目标噪声特征响应度曲线Fig.7 Characteristic response curve of ship target noise
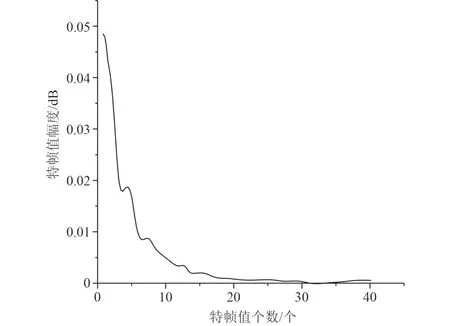
图8 舰船目标噪声特征值大小曲线Fig.8 Ship target noise characteristic value size curve
3.2 舰船目标噪声分类
由于舰船目标噪声比较复杂,并且每个船舶目标噪声之间相互交错,因此本文采用的神经网络分类器具备非线性隐层。将提取到的舰船目标噪声的特征矢量输入船舶目标噪声分类器中,将一部分的目标噪声特征样本用作网络的训练,以便能够得到合适的权值,接着将另外的样本用作分类检测。在对舰船目标噪声进行分类之前,需要从众多的特征中识别出最有效的特征,这样能够更好地进行分类。使用欧式距离测量的方法对船舶目标噪声特征进行提取,最优特征的判断方法如下式:
式中:Sb为类间距;Sw为类内距。找到一个合适特征维数使得J达到最大值,从所有特征数D中选择d个特征数,如下式:
将1 620 个舰船目标噪声特征样本分成ABC 三类,每一类又分成训练样本和测试样本,舰船目标噪声能量特征分类结果如表1 所示。目标噪声能量特征识别准确率和训练次数之间的关系如图9 所示,可以看出,随着训练次数的增加,准确率也会逐渐增加。
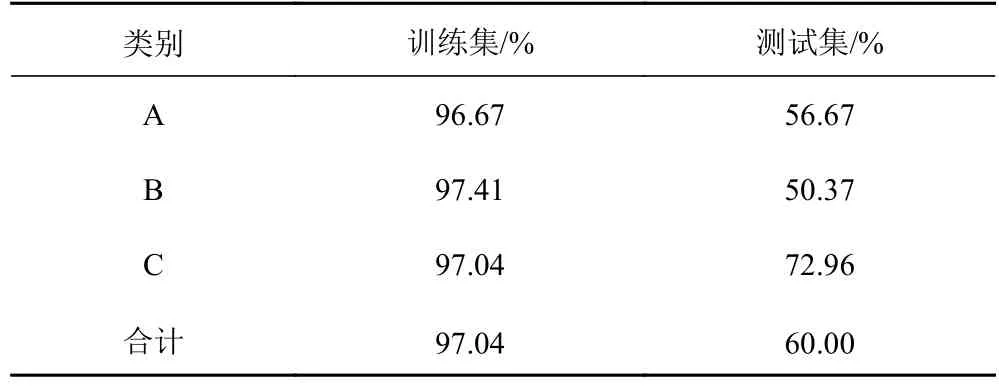
表1 舰船目标噪声能量特征分类结果Tab.1 Classification results of ship target noise energy features
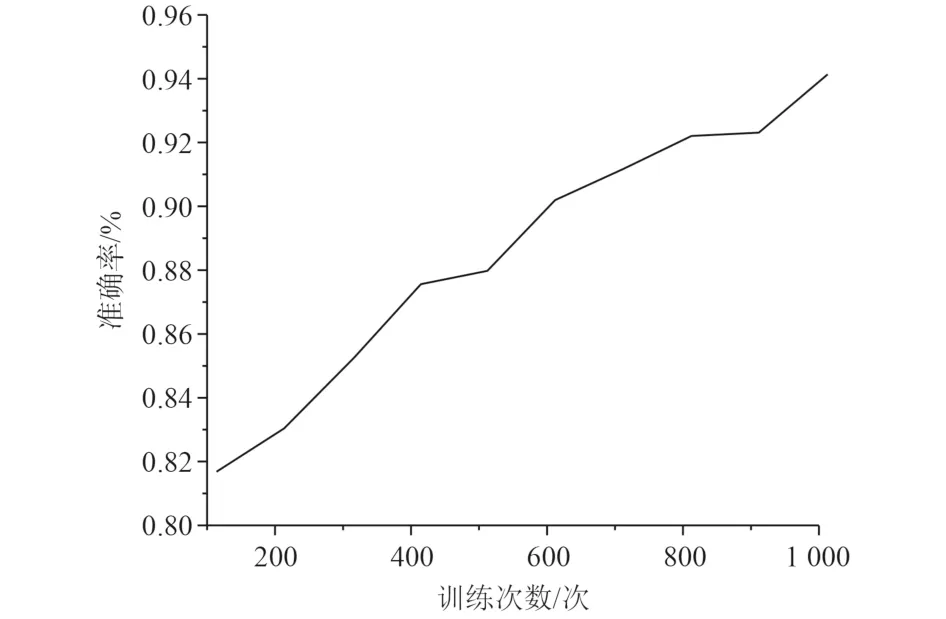
图9 识别准确率和训练次数之间的关系Fig.9 Identify the relationship between accuracy and the number of training sessions
4 结语
舰船目标噪声的识别难度在于其噪声的产生机制非常复杂,噪声中的成分比较多,其中包含连续谱和较强的窄带2 种分量,这使得舰船目标噪声的特征提取一直是舰船信号处理领域的一个重要问题。在舰船目标噪声识别过程中最关键的步骤在于分类器的选择。神经网络的优点主要有分布处理、自主学习、并行计算等。随着BP 算法的提出,深度神经网络获得了跨越式的发展。将神经网络技术应用到舰船目标噪声的提取和分类中,可以实现舰船目标噪声识别技术的智能化发展。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
舰船科学技术(2022年10期)2022-06-17
北京航空航天大学学报(2021年9期)2021-11-02
舰船科学技术(2021年12期)2021-03-29
应用声学(2020年2期)2020-06-08
电子制作(2019年11期)2019-07-04
北京航空航天大学学报(2018年1期)2018-04-20
舰船科学技术(2016年1期)2016-02-27
舰船科学技术(2015年8期)2015-02-27
电视技术(2014年19期)2014-03-11