基于RSSI 的笼内鸡只定位方法研究
2023-12-11 04:37赵学谦贾雁琳李丽华
河北农业大学学报 2023年6期
赵学谦,薛 皓,于 尧,贾雁琳,李丽华
(河北农业大学 机电工程学院,河北 保定 071001)
精确地笼内鸡只定位对于研究鸡只的运动行为具有重要意义。采用无线射频识别(RFID)技术根据RSSI 值的衰减对鸡只进行定位能够实现远距离、无接触的多目标行为监测,及时准确地发现行为异常、活动状况有问题的鸡只。对鸡只位置分布进行自动记录分析,能够减少人员进出鸡舍次数,降低鸡只的应激反应,提高福利化养殖和经济性[1]。RFID 技术投入成本少、性能优良、信息交互快,广泛应用于目标定位、智能物流等领域[2]。超高频RFID 技术比起低频和高频RFID 技术有更大的读取范围、更高的读取速率,最大的优点是还可以同时读取多个标签[3]。如何准确高效地使用无线射频识别技术对目标进行定位,许多学者都对其进行了探讨和分析。2013 年Catarinucci 等基于UHF RFID 技术设计了多天线系统,能够有效定位小型实验室动物活动位置[4]。2015 年Sales 等基于LF RFID 技术设计了1 个蛋鸡定位追踪系统,该系统通过对蛋鸡的定位来监测蛋鸡穿过环境偏好室间通道的时间和次数,监测结果显示蛋鸡群在通道停留时间和进入次数的成功检测率高于蛋鸡个体[5]。2015 年Macri S 提出了1 种基于UHF RFID 技术的跟踪解决方案,系统的软件部分能够处理来自硬件系统的原始数据,该解决方案能够正确对笼内小鼠进行定位追踪[6]。2017 年Li L 等采用UHF RFID 技术构建富集式鸡笼内的母鸡个体追踪系统,该系统通过对笼内母鸡的位置分析,实现准确监测笼内母鸡个体的采食和筑巢行为[7]。2017 年Taylor 等采用RFID 技术在商业农场中4 个不同性别的鸡群中定位1 200 只肉鸡的个体位置,研究肉鸡在农场中活动范围和频率与外部环境变化的关系[8-9]。为了解蛋鸡个体内部和个体之间在放养行为上的差异,2017 年Larsen H等采用RFID 技术追踪2 个商业鸡群中自由放养蛋鸡在不同室外区域的位置信息[10]。2018 年尹姝等提出的室内移动目标定位方法是将RFID 和自卡尔曼滤波算法相融合,实验证明该算法对移动目标的室内定位精度有一定程度的提高[11]。2018 年Yan L 等设计了1 种提高室内机器人定位精度方法,该方法采用无源RFID 技术将信标设置为蜂窝模型,提高了读卡器效率和定位精度[12]。2018 年Li Z M 提出了1 种基于参考标签的RFID 定位算法,用实验证明了该算法大大提高了定位精度,使定位更加准确[13]。2019 年李广顺等提出1 种将目标搜索结合RFID 技术的定位算法,定位结果进行不断地重复校准,最小定位误差为0.5 m,平均定位精度得到了提高[14]。2019 年Wang FF 提出1 种RFID技术和IMU 技术相融的室内跟踪方法,试验结果表明融合算法在室内跟踪中具有良好的性能[15]。对于笼内环境复杂,存在信号遮挡和笼子金属对信号折反射等问题,需要可靠的方法以准确获得鸡只位置坐标。
基于此,本文设计了1 种基于UHF RFID 技术的鸡只个体定位信息自动采集系统,合理地布置天线,搭建信号衰减测距模型,结合混合滤波算法和极大似然估计法以及牛顿迭代法实现鸡只个体位置确定。
1 材料和方法
1.1 鸡笼,鸡和鸡舍
本实验 在4 800 mm×1 200 mm×680 mm 单层式鸡笼的第一个小笼子内(1 200 mm× 1 200 mm×680 mm)内进行。根据1∶9 公母比例饲养3只公鸡,27 只母鸡。母鸡是280 d 左右海兰灰蛋鸡,质量在1.6~2.1 kg 之间。公鸡是180 d 左右河北保定本地的柴鸡,质量在2~2.5 kg 之间。清粪时间是每天上午7 时30 分左右,投喂饲料时间分别是上午10 时和下午2 时。实验时间是2020 年8 月5 日到2020 年8 月18 日。实验场地是河北农业大学的畜牧教学基地,整个鸡舍布置如图1。
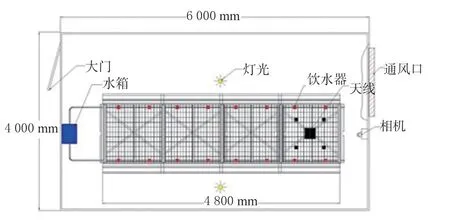
图1 实验鸡舍整体布置Fig. 1 The overall arrangement of the experimental chicken house
1.2 RSSI 值采集系统
本实验中采集系统每天工作10 h,并且要同时采集每个鸡只脚踝标签的RSSI 值,需要读写器有超长稳定工作时间、较高的标签识别率和网络接口速率。固定式读写器(FU-M6-A,ThingMagicM6e-A,主动工作方式,深圳铨顺宏科技有限公司)支持4路独立天线,能充分发挥防碰撞算法的优势,被用来读取和写入数据。选用4 个3 dBi 天线(QBTX301,7 cm×7 cm×0.1 cm,双馈点圆极化陶瓷,深圳骐宝科技有限公司)和1 个8 dBi 天线(QBTX801,26 cm×26 cm×3.5 cm,圆极化平板外置,深圳骐宝科技有限公司)。2 种天线设为间歇工作方式同时置于RSSI 值采集系统中。标签(Alien-Inlay ALN-9654,10 cm×3 cm,广州东芯智能科技有限公司)作为脚环。
程序软件运行在PC 机(Intel(R) Core(TM)i77700HQ(CPU),2.80 GHz,Windows10,16 GB RAM 和1T SSD)。在Jupyter Notebook 应用程序上使用Python 语言将读写器软件与本地连接,并将数据进行存贮。在本实验中将3 只公鸡作为研究对象,编号为1 号、2 号和3 号。在鸡只适应笼内环境后,读取2020 年8 月14 日到2020 年8 月16 日在自然光照环境下上午9 时至下午6 时之间的数据列表进行分析处理。
5 个天线(1 个8 dBi 和4 个3 dBi)通过长1 m阻抗为10 Ω 的馈线连接到2 个四通道读写器(ThingMagicM6e-A,902~928 MHz,Trans Tech Systems),读写器以网口连接方式连接到电脑,RSSI 值采集系统接口如图2 所示。
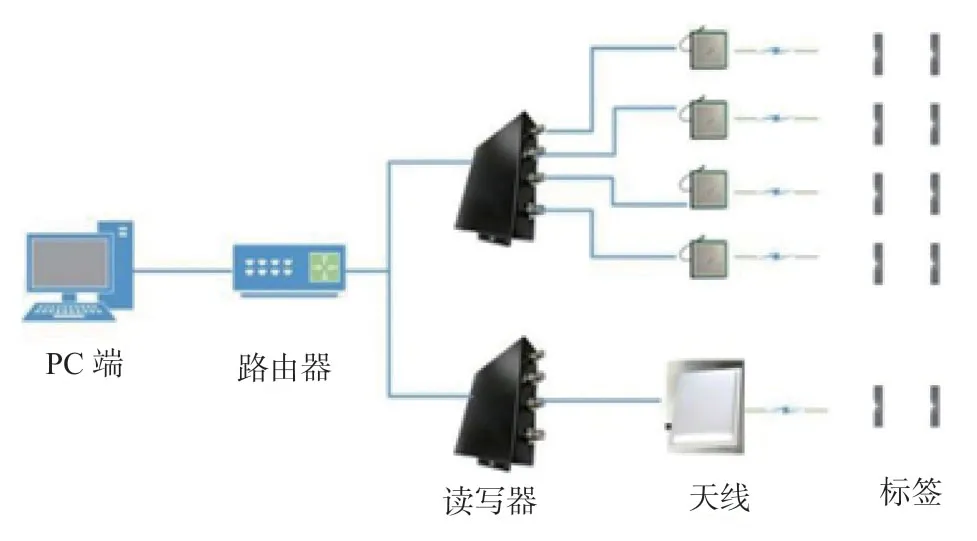
图2 RSSI 值采集系统接口Fig. 2 Interfacing of the RSSI system components
1.3 天线布置
根据文献[16]笼子对信号有屏蔽作用,为减少信号传播的多径效应,将天线采用圆极化方式布置于单个鸡笼顶部。调整5 个天线的位置和角度以及读写器的频率,保证笼内移动的标签都在天线辐射范围内,在天线平面平行笼底和发射功率28.5 dBm 时标签反射回的接收信号强度较为稳定,然后将天线进行固定。以天线中心为参考点,功率增益为3 dBi 的1 号、2 号、3 号、4 号天线和功率增益为8 dBi 的5 号天线在笼底射频范围分别是45 cm 左右和75 cm 左右。由于笼子本身有一定的坡度,按照在笼子底部最低的平面建立平面直角坐标系,以笼子底部左下角作为坐标原点,笼子顶部1 号、2 号、3 号、4 号、5 号天线位置坐标分别为:(30,30,68)cm、(90,30,68)cm、(90,90,68)cm、(30,90,68)cm、(60,60,68)cm。天线笼内布点如图3 所示。

图3 天线和标签位置分布Fig. 3 Antenna and tag location distribution
1.4 标签布置
在1 号、2 号、3 号和4 号天线正下方的笼底分别布置1 个标签,这4 个标签作为参考标签来接收天线信号计算该环境下路径损耗系数n。以笼子底部左下角作为坐标原点,参考标签1 号、2 号、3 号、4 号的位置坐标分别为:(30,30,4)cm、(90,30,4)cm、(90,90,4)cm、(30,90,4)cm。另外布置4 个标签作为待测标签来验证养入鸡只后系统定位准确性,待测标签5 号、6 号、7 号、8 号的平面位置坐标分别为:(10,10)cm、(110,10)cm、(110,110)cm、(10,110)cm,标签布置位置如图3 所示。实验开始后,将电子标签设计成脚环佩戴在监测鸡只的脚踝处,如图4。

图4 佩戴脚环的鸡只Fig. 4 Chickens wearing ankle rings
1.5 视频验证系统
将小米云台2K 版智能摄像机固定在距离鸡笼50 cm、高2.3 m 的墙上,对笼内的鸡只进行监测,如图5。实验开始前,应用读写器软件读到鸡只脚踝上的标签再重新写入进行编号,使得鸡只脚踝的编号与鸡冠和鸡背的号码一致,方便在视频中识别鸡只。后期通过cv2 获取视频流,每隔3 s 取1 帧图像,人工观察视频,根据图像位置在图片上标出位置坐标与系统定位坐标相对比,视频图像上显示时间与读写器软件界面时间相对应,实验期间读写器不间断采集数据,摄像头持续进行录像,对本文基于RSSI融合混合滤波算法计算的位置坐标进行验证。

图5 摄像机位置Fig. 5 Camera position
2 数据处理
2.1 RSSI 值与距离模型构建
根据RSSI 信号衰减值计算天线与标签之间距离的原理是当佩戴脚踝标签的鸡只进入天线射频范围内时,鸡只脚踝标签获得能量并将接收到的电磁波信号反射给读写器天线[17],如图6 所示。

图6 天线信号传播Fig. 6 Antenna signal propagation
式(1)中,p(d)表示天线发射的信号经过距离d衰减之后的RSSI 值,p(d0)表示天线发射的信号传播距离d0衰减之后的RSSI 值(其中d0通常取1m)[18],xσ是均值为0,方差为σ2按照高斯分布随机数,n是该环境下的路径损耗系数。对式(1)进行分析,可以得到计算信号发射端和信号接收端之间距离d的公式
式(2)中,A表示以1 m 为参考距离时,发射端发出的无线信号在空间传播1 m 后接收端接收到的RSSI 值强度。RSSI表示接收端接收信号强度的均值。n是路径损耗系数。
2.2 RSSI 值进行混合滤波
基于RSSI 定位的精度主要由距离估计值决定,RSSI 值的测量是否准确决定着距离估计值的准确性[19-20],因此减小RSSI 值误差能够提高距离估计值的准确度从而提高定位精度。然而,大量已有的实验数据表明,实际环境中噪声、障碍物、电磁波和多路效应等各种干扰因素的存在[21],使得同一目标节点在定位空间中同一位置接收到的 RSSI 值是随机变化的。在本实验中将某个标签一段时间内采集到的1 000 个RSSI 值按照时间戳导入Jupyter Notebook 应用程序进行仿真得到如图7,结果显示在这段时间内该标签采集到的RSSI 值在[-77,-47](dBm)之间上下波动,信号波动大,稳定性差但整体上服从高斯分布。
因此要提高定位的精度,需要对RSSI 值进行滤波来减小根据RSSI 值对距离估计的误差。本文采用狄克逊和高斯混合滤波算法[22]来对信号进行处理。首先用狄克逊检验法滤波,剔除一些受到外界环境干扰后发生跳变异常的数据,接着用高斯滤波算法进一步优化。在高斯滤波筛选出置信区间的RSSI 值后,利用高斯模型将每个时间戳的RSSI 值和其相邻时间戳的RSSI 值进行加权平均后的数据代替原有数据。
2.3 参数优化
在信号衰减测距模型中,笼子内的环境对笼顶天线发出信号强度的影响主要体现在发射端发出的无线信号在空间传播一段距离后接收端接收到的RSSI 值强度A和路径损耗系数n上,路径损耗系数与当前笼内环境有关[23-24]。本节主要讨论路径损耗系数n的选取对发射节点与接收节点之间距离d的影响,如图8 所示。
假定参考功率A=-60 dBm 时,路径损耗系数n取2、3、4 时RSSI 值与距离的关系。路径损耗系数如果取经验值,会对发射节点与接收节点之间距离d有很大影响。为了使它们最大限度地满足天线发出的无线信号在笼内的传播特性,减小基于RSSI值测距的误差,需要对其进行优化以得到最适合当前环境中的参数值。
参数优化具体步骤为:
(1)距离1 号发射天线64 cm 的1 号标签,距离2 号发射天线64 cm 的2 号标签,距离3 号发射天线64 cm 的3 号标签和距离4 号发射天线64 cm的4 号标签处各测量1 组RSSI 值,1 号、2 号、3 号、4 号标签处测1 组5 号天线的RSSI 值,每组1 000 个。
(2)对采集到的RSSI 值使用狄克逊和高斯滤波进行预处理,再用高斯模型继续优化,对优化后的数据分别取中间值和均值。对优化后的RSSI 值进行中间值得到RSSI(a),同样的对优化后的RSSI 值取均值得到RSSI(b)。对1 号标签接收到1 号天线的RSSI(a)和RSSI(b)做算数平均处理,即:
(3)使用公式(2)计算得到该环境下路径损耗系数n的值。
2.4 极大似然法与牛顿迭代法求得最优解
在RSSI 定位系统中极大似然估计法是1 种常用的定位方法[25-27]。设1 号、2 号、3 号、4 号、5 号天线的坐标为(xi,yi,68),i为1、2、3、4、5。设(x,y,z)为鸡只脚踝携带电子标签D 的坐标,D 到各天线的距离分别为d1、d2、d3、d4、d5且这些距离根据信号衰减测距模型求得,则由欧几里得距离公式可以得到方程组:
牛顿迭代法具有局部收敛特性,选择合适的初值能够避开牛顿法进入死循环的问题。采用极大似然估计法获得目标节点的初始坐标,将初始坐标作为牛顿法的初值代入牛顿迭代法中,设定迭代4 次,取其最接近初值的解作为最优解。求得最优解:fi(i=1,2,..n)表示(4)式等号左边未知数的函数表达式,X(K)表示(x,y,z,d)的当前值的列向量,在X(K)处用泰勒公式展开,得到式(5)。
对其求导得到如(6)式的迭代公式:
对标签每次定位时,标签距天线的距离和标签位置x、y、z、d1、d2、...dn组成初始值列向量X(0),按上式展开迭代求得标签的位置坐标(x',y',z')即为定位最优解。
3 结果与分析
3.1 滤波和参数优化的结果与分析
如图9,狄克逊滤波只剔除了高端和低端异常值。高斯滤波对RSSI 值进一步优化,距离真实RSSI 值较远的数据被滤掉,使得数据更加平滑,减小了RSSI 值波动。
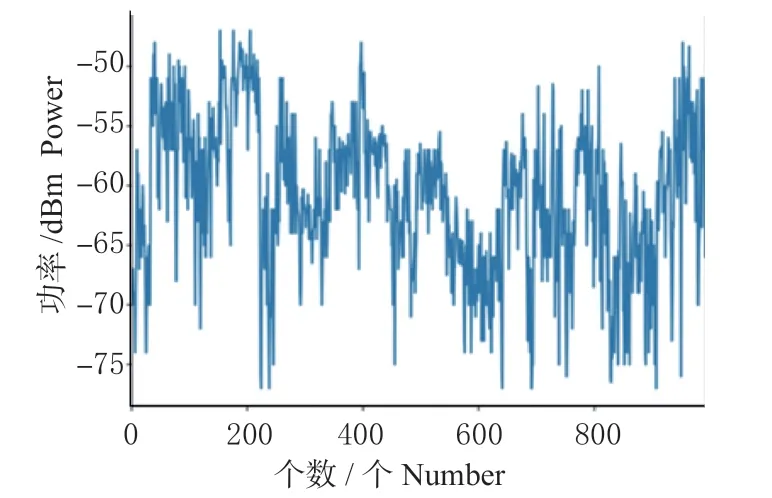
图9 狄克逊检验法滤波后RSSI 值Fig. 9 Dixon test RSSI after filter
如图10,将原始数据采用狄克逊和高斯混合滤波剔除异常数据后,RSSI 值在[-67,-54.6](dBm)之间上下波动,稳定性提高了很多。
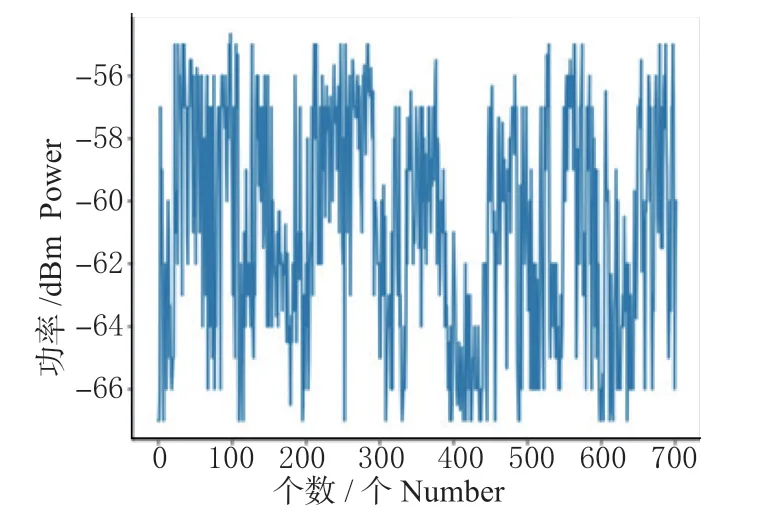
图10 高斯滤波后RSSIFig. 10 RSSI value after Gaussian filter
经过混合滤波处理和高斯模型优化后的数据如图11。

图11 高斯模型优化后RSSIFig. 11 RSSI after Gaussian model optimization
原始数据波动大大减小,稳定性大大增强,很大程度上解决了信号稳定性差的问题。5 个天线空间位置不同,受到环境影响的程度也不同,因此为了提高测距的精确度要在5 个天线处分别建立信号衰减模型[28],n=。同理,对于2 号、3 号、4 号、5 号天线也是用该方法来计算得到该环境下的路径损耗系数n。实验测得5 个天线处的A、n值如下表1:
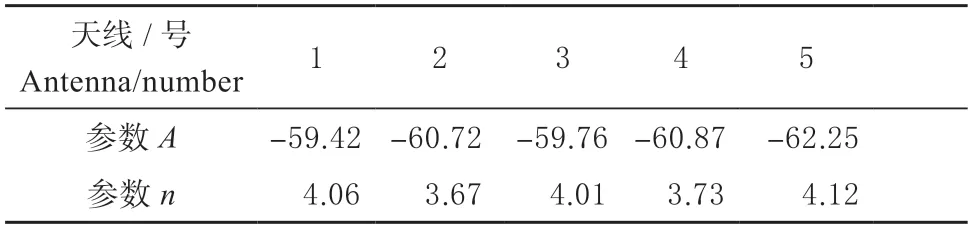
表1 各天线处的参数A 和nTable A and n of parameters at each antenna
结果表明参数A、n的值都是正常值,属于文献[29]和文献[30]提供的常用环境下路径损耗系数n的区间。
3.2 定位结果与分析
对RSSI 值数据进行滤波并优化参数后,根据信号衰减测距模型求得待测标签与天线之间的距离。利用极大似然估计法和牛顿迭代法如式(7)、(8)、(9)计算5~8 号待测标签的位置坐标。由于同一位置采集到的RSSI 值会存在一定随机波动,因此在5~8 号每个待测位置采集25 次RSSI值,共100 次取其均值确定最终位置坐标。其中有83 次的坐标误差在5 cm 以内,即定位误差在5 cm以内的概率接近83%。对其每个位置坐标取均值求得5~8 号待测标签的平面位置坐标分别为:(6.81,12.77)cm、(109.86,12.02)cm、(106.34,108.25)cm、(14.68,104.56)cm。实际位置坐标为:(10,10)cm、(110,10)cm、(110,110)cm、(10,110)cm,如图12 所示。
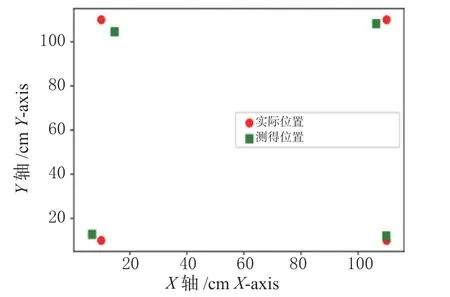
图12 定位结果比较Fig. 12 Comparison of positioning results
放入鸡只后对笼底的标签存在遮挡,对定位精度产生影响,但误差都控制在5 cm 以内。与鸡体积相比,5 cm 的定位误差对本实验的研究影响很小,算法的定位精度可以满足实验需求,验证了本研究中定位算法的实用性和可适性。
进一步根据本研究中的定位方法,随机截取10 min的视频和RSSI 值对这3 只鸡进行定位。通过cv2 获取视频流,每隔3 s 取1 帧图像,人工观察视频,根据图像位置在图片上标出位置坐标存入Excel 表格并将系统采集到RSSI 值进行定位的坐标存入Excel表格,将两者进行对比,实际定位和节点-节点定位以及混合滤波算法的定位对比如图13 所示。
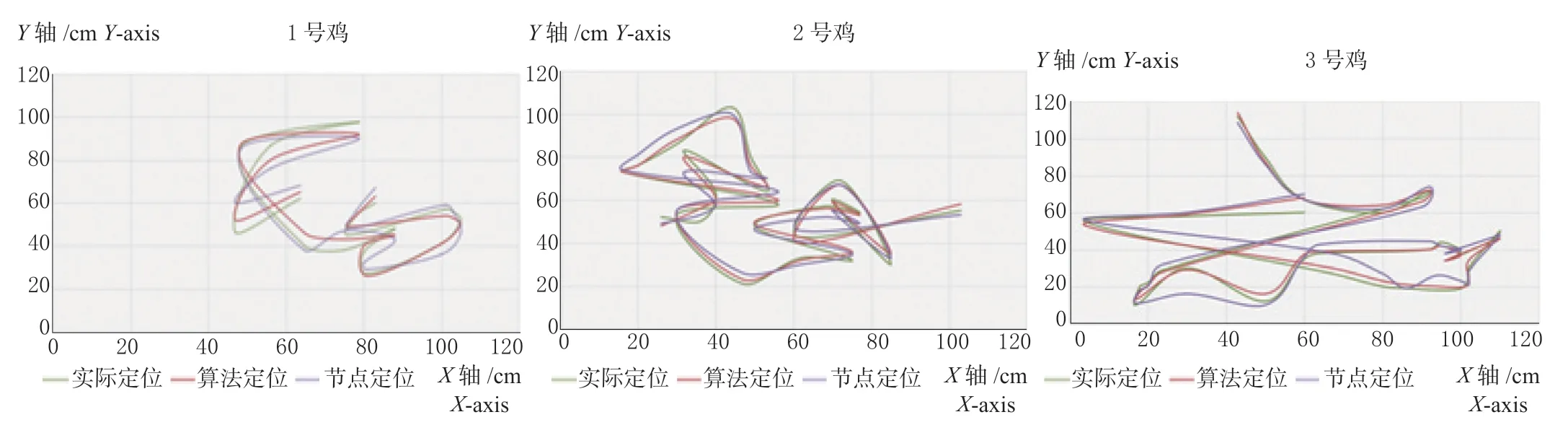
图13 10 min 内定位对比Fig. 13 Location comparison in 10 minutes
图13 显示了3 只鸡在这10 min 内应用本研究的算法定位与实际定位和节点-节点定位的对比,发现应用算法的定位结果更接近真实位置,证明算法可较为准确地对鸡只个体进行定位。
4 结论
(1)设计了1 种基于UHF RFID 技术的笼养环境下鸡只位置信息采集系统,利用少量天线就能快速获取满足定位要求的RSSI 值,为进行定位算法的研究提供了硬件基础。
(2)采用狄克逊和高斯滤波混合滤波算法将原始数据预处理,通过高斯模型,中值和均值滤波对处理后的数据进行优化,很大程度上解决了信号稳定差的问题。对路径损耗系数进行优化,一定程度上提高了测距的准确性。利用极大似然估计法和牛顿迭代法求解标签最优位置坐标,与不采用定位算法相比提高了定位精度。
(3)通过比较放入鸡只前后标签的坐标误差,验证了定位方法的可靠性。对笼内鸡只进行实时定位,如图13 所示实验结果表明,该定位方法与不采用定位算法相比减小了定位误差,可靠性较高且有较强的鲁棒性,为鸡只行为分析提供了1 种方法。
猜你喜欢
小天使·二年级语数英综合(2019年4期)2019-10-06
小学生学习指导(低年级)(2019年6期)2019-07-22
空间控制技术与应用(2015年3期)2015-06-05
遥测遥控(2015年2期)2015-04-23
四川师范大学学报(自然科学版)(2015年2期)2015-02-28
中国交通信息化(2014年4期)2014-06-05
电子设计工程(2014年20期)2014-02-27
北京航空航天大学学报(2013年6期)2013-12-19
测绘科学与工程(2013年4期)2013-03-11
电子科技大学学报(2011年3期)2011-02-10