基于物理学科实践的初中物理“力臂”概念教学策略探讨
2023-12-12 03:14张步青
物理教师 2023年11期
张步青
(丹阳市第三中学,江苏镇江 212300)
1 认识学科实践
学科实践是指具有学科特色的典型实践,即学科专业共同体怀着共同的愿景与价值观,运用该学科的概念、思想与工具,整合心理过程与操控技能,解决真实情境中的问题的一套典型做法.简单说,学科实践就是强调运用学科特有的方式学习,培养学科素养的过程.物理学科实践是指让学生在经历真实的科学探究的过程中,解决真实情境问题.它指向物理学科核心素养,以培育人为目标.
目前,初中物理教学在新课程标准的引领下,逐渐由“一言堂”的传统教学模式转变为以学生“自主、合作、探究”的新型教学模式,教学方法也由知识传授逐渐发展为指导探究,如苏科版“力臂”概念的建立.
(1)利用如图1所示简易杆秤模拟称物体质量的过程.然后提出问题:如图2所示,分别在A、B两点用弹簧测力计拉秤杆,让秤杆平衡,两个点需要的拉力大小一样吗?(2)如图3所示,在B点用弹簧测力计分别沿竖直和倾斜的方向拉秤杆,让秤杆平衡,两次需要的拉力大小一样吗?问题1目的是让学生认识到杠杆平衡与某个距离有关;问题2目的是让学生体会到这个距离不是支点到力的作用点的距离,而是支点到力的作用线的垂直距离.

图1
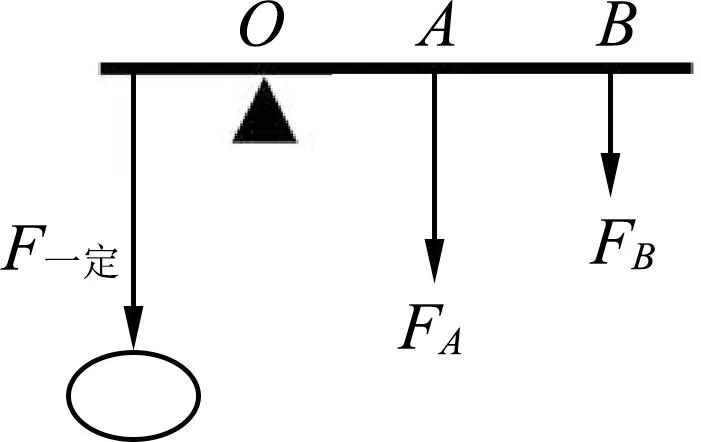
图2
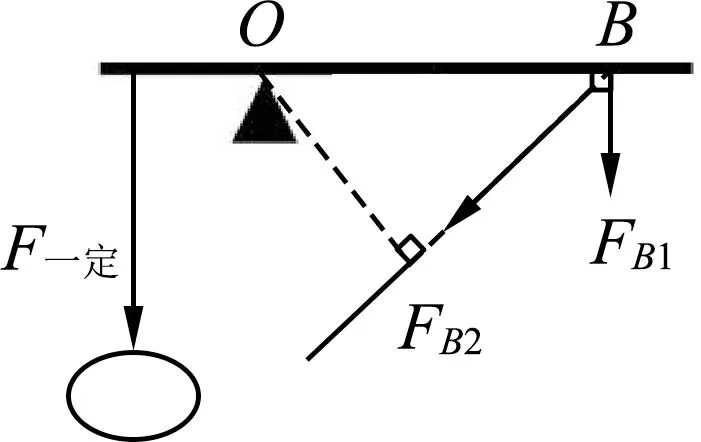
图3
教师没有直接给出力臂定义,而是通过两次实验对比,启发学生理解力臂的概念.此设计仍未能引起学生足够的兴趣、激发学生的深层思维,依然停留于思维表层,游离于心灵之外,未能触及教材、概念、规律背后的意义与价值.本文基于物理学科实践理念提出力臂概念教学的策略,以更好地提高学生的物理核心素养,实现育人目标.
2 基于学生认知,设计认知冲突
“假如让我把全部教育心理学仅仅归结为一条原理的话,那么,我将一言以蔽之:影响学习的唯一重要因素就是学习者已经知道了什么.要探明这一点,并据此进行教学”——奥苏贝尔(认知教育心理学家).学生在8年级已学习了二力平衡的相关知识,会误认为物体平衡时仅是几个力之间的关系.笔者根据学生这样的认知,设计了活动1.
活动1.A、B哪段重些呢?
用细线拴住一端粗、一端细的实心胡萝卜并悬挂起来,使其沿水平轴线方向静止,如图4所示;在拴线处沿竖直方向将胡萝卜切成A、B两段.A、B哪段重些呢?

图4
班上49名学生,8个人选粗的,1个人选细的,40个人选一样重.大部分学生认为胡萝卜处于平衡状态,所以两边是一样重.实际测量:左边152.3 g,右边120 g,粗端更重.这是为什么呢?今天我们就来共同探究.笔者认为,教学要尊重学生的认知水平,此活动的设计建立在教师了解学生已有认知的基础上,让其在认知冲突中意识到杠杆平衡与二力平衡的不同,从而激发学生的探究欲望,启发学生深度思考.
3 搭建进阶路径,形成科学概念
活动2.初步定义力臂,得出杠杆平衡条件.
第1步:猜想.让杆秤在水平位置平衡,猜想杆秤平衡与什么因素有关?找一根带刻度的直尺作为杠杆,悬挂钩码施加作用力,改变钩码的个数改变作用力的大小,改变钩码悬挂位置改变力的作用距离.杆秤在水平位置平衡,猜想杆秤平衡与什么因素有关?
笔者了解到学生小学的时候,学习过“平衡尺在什么情况下能够保持平衡”.由于小学研究的要求较低,杠杆处于水平位置,杠杆上的力是通过悬挂钩码产生竖直向下拉力.实验中,调节平衡尺,使其在水平位置平衡.在支点左侧10 cm处挂2个钩码,分别在支点右侧5 cm处需要挂4个钩码,10 cm处需要挂2个钩码,20 cm处需要挂1个钩码,才能使平衡尺平衡.实验结论:距离支点越远,保持平衡需要的钩码越少,即越省力.小学科学没有力臂的定义,学生认为杠杆保持平衡与钩码数和支点的距离有关.我们尊重学生的起点,先默认杠杆保持平衡与支点到钩码悬挂点的距离有关并初步定义这个距离叫力臂.如图5所示,把右边挂的钩码产生竖直向下拉力称为动力F1、左边挂的钩码产生竖直向下拉力称为阻力F2;OA为动力臂L1,OB为阻力臂L2.学生在小学科学学习基础上,比较容易猜想到影响杠杆位置平衡的因素是动力F1、阻力F2、动力臂L1、阻力臂L2.

图5
第2步:学生实验.在水平位置平衡,动力F1、阻力F2、动力臂L1、阻力臂L2有什么关系?教师引导学生改变支点两侧的钩码位置和个数,让杠杆在水平位置平衡.用同样的方法做3次得到3组数据,将数据填入表1.
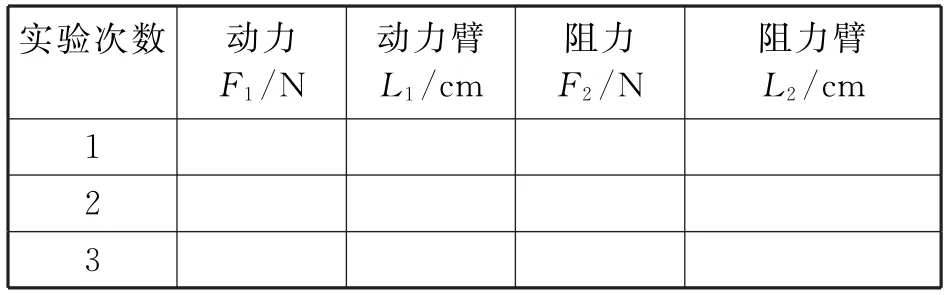
表1
第3步:数据分析.师生共同分析数据,归纳得出杠杆平衡条件:动力×动力臂=阻力×阻力臂,表达式为F1×L1=F2×L2.
活动2建立在学生小学科学的基础上,符合学生认知水平.第1步,学生根据小学已有知识较易提出猜想.第2步的实验和第3步数据分析,学生在经历初中物理学科实践的过程中能快速找到杠杆平衡的条件,此条件中的力臂概念虽然是有待修正的,但它符合人们由简单到复杂的认知发展规律,这也将成为后续进阶学习的起点.
活动3.探究什么是真正的力臂.
如图6所示,在杠杆左边离支点20 cm处,悬挂了1 N的钩码,在左边离支点10 cm处,用弹簧测力计施加向右上的拉力,让杠杆在水平位置平衡,拉力是多大?

图6
第1步:理论计算.根据活动2归纳得出杠杆平衡条件:F1×L1=F2×L2,F1×10 cm=1 N×20 cm,可得F1=2 N.
第2步:实验呈现.当揭开遮住弹簧测力计的纸片时,学生发现示数却是4 N.
第3步:探究“真力臂”.学生自然产生“为什么结论不对?”“什么是真正的力臂?”的疑问.此设计中让学生的原有观念与现实情境有了矛盾,产生了认知冲突,学生思维受到了触发,激发了学生学习兴趣与好奇心,提出了新的研究问题.
“F1×L1=F2×L2,即动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”的结论肯定是有瑕疵的,必须做修正.弹簧测力计的拉力是4 N,那么拉力对应的动力臂应该是5 cm才行.那么这个5 cm在哪呢?或者说如何才能凑到5 cm呢?学生作图发现:拉力与水平方向成30°角,在直角三角形中30°角对应的直角边是斜边10 cm的一半5 cm,如图7所示.这个5 cm的距离应该是动力臂,动力臂应该是支点到动力作用线的垂直距离,而不是支点到动力作用点的距离,对力臂的定义进行了再创造.
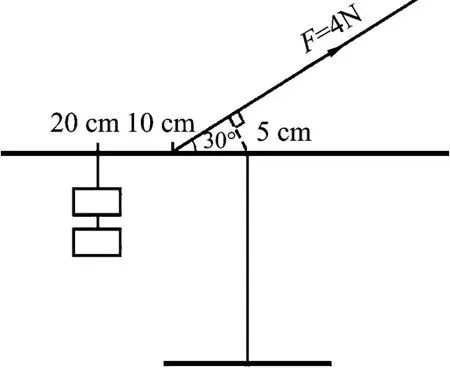
图7
第4步:学后反思.问题是“为何力臂定义为支点到作用点的距离,活动2的实验结论也能成立呢?”学生通过作图,发现杠杆在水平位置平衡且两个力F1和F2沿竖直方向时,支点到力作用点的距离=支点到力的作用线的距离.活动2的结论只是活动3结论的特例.
活动2引出进阶的起点“假力臂”.活动3是进阶的路径:其中第1、2步引起进阶的兴趣;第3步是进阶的探究;第4步是进阶后的反思.学生经过探究自主建构了正确概念,达到了进阶的终点“真力臂”,搭建的进阶路径如图8所示.通过活动3的冲突,用新证据来冲击学生的前概念,迫使他们放弃或者修正,发展定义,再设计情境来考验学生,达成核心概念的转变.力臂的诞生过程,就是科学发现、科学进化的过程,进而从前概念转变为科学概念,用物理学科的内涵方式来培养学生的关键能力和必备品格,让学生在发现中长大.
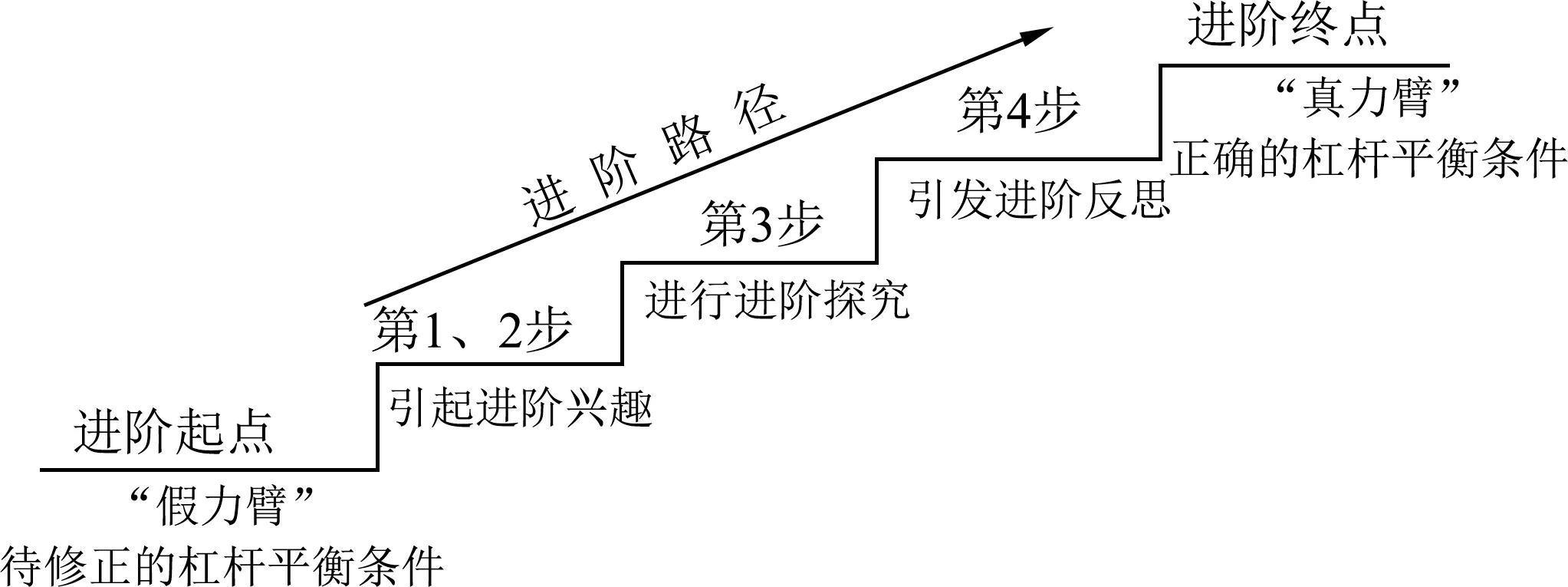
图8
4 利用模型建构,解决真实问题
物理模型建构作为一种重要的科学方法,是物理教学中重要的教学内容.学生通过物理模型建构简化问题,抓住主要矛盾,解决实际问题.师生通过将实心胡萝卜建构成杠杆模型,分析杠杆的五要素,将实际问题转化为杠杆问题.根据解决真实问题的学习证据,我们可以判断学生能否完成学习任务、完成到什么程度,还有什么问题.解决真实问题后如果与学生进行一次交流,更有利于我们了解学情,改进教与学.在这个过程中,学生的抽象思维、逻辑思维、数学技能等模型建构要素都得到了充分的提升,从而促进其科学素养的培养.
活动4.讨论胡萝卜悬挂平衡,在悬挂处一刀分为两段,为何粗段重呢?
师生共同讨论,将悬挂的实心胡萝卜视为一个杠杆,如图9所示,可以作出杠杆的五要素,根据杠杆的平衡条件分析GA与GB大小.支点在悬挂点O,设左边部分重为GA,重心在C'处,力臂为OC,右边部分重为GB,重心在D'处,力臂为OD,因OC<OD,根据杠杆平衡条件:GA·OC=GB·OD,所以,GA大于GB,所以A段较重.教学中C'、D'的确认是难点,教师可以引导学生讨论,分别将胡萝卜的A、B两段用细线拴住悬挂起来,使其沿水平轴线方向静止,来确定重心C'、D'.
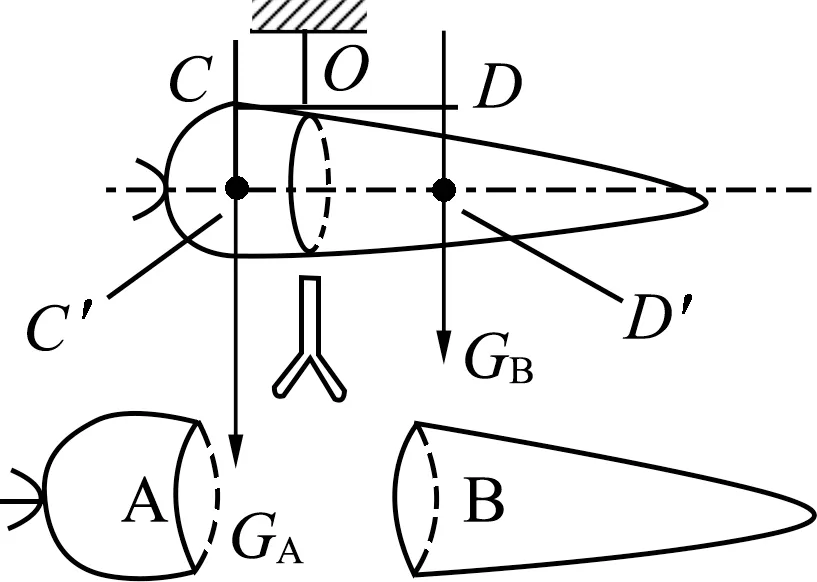
图9
5 实施初中物理学科实践的思考
杜威讲过教育就是经验的唤醒、重组和生长.上述设计中笔者用物理学科实践的方式进行力臂概念的教学,始终基于学生的认知发展水平进行设计,先认可学生小学时的认知,对原有的经验进行唤醒.教师设计实验让学生发现对力臂原有的认识解决不了现在的问题,有冲突之后学生产生了疑问,再通过推理、创新、归纳、模型建构进行力臂的概念的重组和生长,形成了力臂的新定义.这个定义具有的内涵不是教师灌输的,而是教师通过组织、引领,在解决真实问题的情景中,学生自己诞生和创造的.
“知识+实践=素养”,只有将学生学科的学习转化为学科实践,才有可能发展学生的学科素养.笔者在物理学科实践中运用以下3个策略:(1)基于学生认知,设计认知冲突;(2)搭建进阶路径,形成科学概念;(3)利用模型建构,解决真实问题.这些策略让学生在学科实践中有了深深的情感投入,触及心灵,学得进.有了深深的认知投入,有质疑、有推理、有创新,想得透.有了深深的态度投入,通过模型建构,解决了实际的问题,用得出.这样的学科实践让学生像学科专家一样思考与实践,学生插上了核心素养的翅膀,增强了成长的动力,学生更加具有理性和判断力,逐步成为了一个独立的真正的人.
猜你喜欢
中国机械工程(2023年17期)2023-09-19
农业装备与车辆工程(2022年4期)2022-10-31
星星·散文诗(2022年34期)2022-09-03
初中生学习指导·中考版(2022年2期)2022-03-11
汽车观察(2019年2期)2019-03-15
汽车观察(2018年12期)2018-12-26
汽车观察(2018年12期)2018-12-26
能源(2018年8期)2018-09-21
试题与研究·教学论坛(2016年28期)2016-08-11
物理教学探讨·初中学生版(2009年3期)2009-05-13