考虑二次排队的智能网联车生态驾驶策略
2023-12-12 12:31孙崇效李昕光于文昌
交通运输工程与信息学报 2023年4期
孙崇效,李昕光,胡 含,于文昌
(青岛理工大学,机械与汽车工程学院,青岛 266000)
0 引言
步入21 世纪以来,我国居民出行需求急剧增长,机动车保有量大幅上升,由此交通运输行业燃油消耗量和污染物排放量快速增加,因此,有效降低交通运输造成的燃油消耗及污染物排放是迫切需要解决的问题。相较于研发新能源汽车、改善交通管理方式和优化信号配时[1]等方法,生态驾驶具有较低的应用成本和显著的节能减排效果,因此被广泛应用于减少能源消耗的问题上,其主要方式是在不改变车辆结构的前提下,通过智能网联技术对车辆运行速度引导[2-4]来避免车辆产生的急加减速现象,从而减少燃油消耗量和污染物排放。
目前,交叉口生态驾驶策略研究集中于通过V2I 通信技术获取道路环境与车辆信息[5-7],为车辆提供最优驾驶轨迹,达到减少燃油消耗的效果。如,Barth 等[8]为引导车辆以高效率、低能耗车速通过交叉口设计了加速度可变的三角函数速度曲线模型;靳秋思等[9]基于机动车比功率提出了一种减少车辆不必要加减速次数的生态轨迹优化算法;Hao 等[10]提出一种自适应信号配时的生态驾驶系统,根据信号灯时序优化车辆速度轨迹,引导车辆通过交叉口;Osman D 等人[11]提出了具有“巡航、加速、减速、停车”四个阶段的Glide Path轨迹优化方法,该方法能够保证车辆速度和加速度的连续性,使得车辆轨迹更加平滑。然而,针对单车的生态驾驶轨迹优化研究容易忽略其他车辆对目标车辆的干扰,所以有必要在生态驾驶策略中考虑排队车辆等影响因素,进一步完善交叉口场景。
车辆排队现象易出现交通流量较大的交叉口场景中,故在进行车速引导过程中需要考虑前方车辆排队长度问题。如,黄意然等[12]基于构建的车辆排队场景提出了“单次踏板”的交叉口生态驾驶轨迹优化模型,并分析了不同场景参数对驾驶员操作容错性和目标车辆的CO2排放的影响;杨祥宇[13]针对非饱和交叉口,提出一种基于排队长度预测的交叉口上游生态驾驶算法,并通过三角函数速度曲线对交叉口上下游控制路段进行优化;于少伟等[14]以燃油经济性与通行能力为目标,提出一种利用通行能力余量的生态驾驶模型,该模型通过感知信息求解获取车辆行驶速度曲线,引导车队平滑地通过各个交叉口。上述研究丰富了交叉口处存在车辆排队现象的生态驾驶策略,但有必要对交叉口处车辆二次排队与目标车辆在进入交叉口时初速度不同的情况进行研究,对于人工驾驶车辆,车辆起步时驾驶员反应时间对排队车辆的影响也应加以考虑。
综上所述,本文构建了考虑驾驶员反应的交叉口处排队车辆的改进IDM 跟驰模型,使车辆的行驶更符合实际驾驶情况。同时,为减少交叉口场景下车辆二次排队的燃油消耗和污染物排放,提出了一种考虑二次排队的智能网联车生态驾驶策略,该策略根据车辆排队现象分为前方车辆在绿灯时间清空和前方车辆二次排队两种情况,智能网联车会根据情况选择通过交叉口方式,最后基于选择结果优化车辆行驶轨迹,降低车辆油耗和污染物排放。
1 交叉口场景构建
本文构建的交叉口场景如图1所示,若干辆人工驾驶车辆(绿车)在交叉口上游车速引导区排队,车队尾车后方有一辆智能网联车辆(白车)驶向交叉口。当交叉口信号灯变为绿灯时,所有排队车辆会加速至最大速度通过交叉口。

图1 交叉口场景Fig.1 Intersection scenes
交叉口场景设置为:
(1)研究场景为单一交叉口,车道为双向两车道,道路存在最高、最低限速,不支持车辆换道;
(2)不考虑道路环境中行人、非机动车的影响;
(3)轨迹优化的目标车辆为智能网联车辆,车速引导范围为交叉口上游车速引导区与下游车速恢复区,排队车辆为具备网联功能的人工驾驶车辆,所有车辆均为燃油车;
(4)交叉口智能设施可以通过V2I技术获取交叉口信号配时、车辆运动状态信息和排队车辆数,将优化结果传递给目标车辆,使目标车辆按照引导速度行驶。
2 生态驾驶策略构建
2.1 排队车辆跟驰模型
IDM(Intelligent Driver Model)模型[15]反映了不同场景下车辆的期望车头时距,该模型能够使车辆在跟驰过程中平稳地改变加速度大小,具有较强的稳定性。为更加贴近实际情况,本文考虑驾驶员反应时间对驾驶行为的影响,对传统IDM跟驰模型进行改进,改进后的公式如下:
式中:a为车辆加速度,m·s-2;amax为自车的最大加速度,m·s-2;ν为自车当前车速,m·s-1;ν0为自车的期望车速,m·s-1;Δν为自车与前车的速度差,m·s-1;s为当前自车与前车的车距,m;s*(ν0,Δν)为期望跟车距离,m;s0为最小车间距,m;τ为驾驶员反应时间,s;T为安全车头时距,s;b为舒适减速度,m·s-2;h为车头间距,m;l为车身长,m。
排队车辆在起步过程中,后车驾驶员从发现前车移动到启动车辆需要一定的反应时间,排队车辆消散时间为绿灯开始时刻到排队尾车通过交叉口停止线的时间,公式如下:
2.2 目标车辆车速诱导生态驾驶策略
目标车辆进入交叉口上游车速引导区域后,上传车辆的位置和速度信息,交叉口智能设施获取当前的信号配时、车辆排队长度等信息估计排队车辆消散时间,将生态驾驶策略分为前方车辆在绿灯时间清空和前方车辆二次排队两种情况。智能设施会根据计算结果要求目标车辆加速、匀速、减速或停车,直至通过交叉口,并在交叉口下游速度恢复区的某一位置将目标车辆恢复到初始车速。
2.2.1 前方车辆在绿灯时间清空
目标车辆以初始速度νc驶入交叉口引导区时,此时目标车辆距离交叉口的距离为d,车辆匀速通过交叉口的时间为d/νc。当排队车辆可以在绿灯结束前消散,即,此时存在绿灯时间使得目标车辆在第一个信号周期跟随前方排队车辆通过交叉口。为保证燃油经济性,目标车辆驾驶方式优先级由高至低为:匀速、减速、加速[16]。目标车辆通过交叉口场景如图2所示。

图2 目标车辆通过交叉口示意图Fig.2 Schematic of target vehicle through intersection
(1)目标车辆匀速通过
绿灯剩余时间内目标车辆可以保持初速度νc匀速通过,该工况判别式为:
此时车辆在交叉口上游和下游区域都按照初速度行驶,燃油经济性最高。
(2)目标车辆减速后匀速通过
目标车辆保持初速度νc匀速行驶会与前方排队车辆发生交通冲突,则目标车辆需要减速至理想车速νd行驶,νd取值范围为νd∈[νmin,νc],此时目标车辆工况判别式为:
车辆行驶速度轨迹的两种边界情况由两个参数定义,即加速度和车辆到达交叉口停止线的速度。第一种边界情况是车辆花费最少的时间采用最大减速度进行减速,第二种边界情况是车辆在整个交叉口上游车速引导区以最小减速度进行减速,所以速度轨迹需满足以下条件:
式中:νd为车辆减速达到的理想车速,m·s-1;ad为目标车辆减速度,m·s-2;td为目标车辆减速时间,s;tu为目标车辆匀速行驶时间,s;νmin为道路最低限速,m·s-1;amin为车辆最大减速度,m·s-2。
(3)目标车辆加速通过
目标车辆需要加速至理想车速νa才能跟随前车在绿灯结束前通过,νa取值范围为νa∈[νc,νmax],此时目标车辆工况判别式为:
速度轨迹满足条件如下:
式中:aa为目标车辆加速度,m·s-2;νmax为道路最高限速,m·s-1;ta为目标车辆加速时间,s;amax为车辆最大加速度,m·s-2。
2.2.2 前方车辆二次排队
当排队车辆在第一个绿灯时间无法完全消散,交叉口处出现车辆二次排队,则目标车辆减速行驶,交叉口处车辆排队消散时间重新估算。该工况分为两种情况:
(1)目标车辆减速后匀速通过
此时判断车辆保持低速行驶便能够通过交叉口,该工况判别式为:
(2)目标车辆减速停车
目标车辆以速度νc驶入交叉口,以减速度ad减速至最小速度νmin行驶,然后以减速度ad减速至停车;当第二个绿灯时间出现,目标车辆以加速度aa加速到速度νc驶离交叉路口,交叉口场景如图3所示。
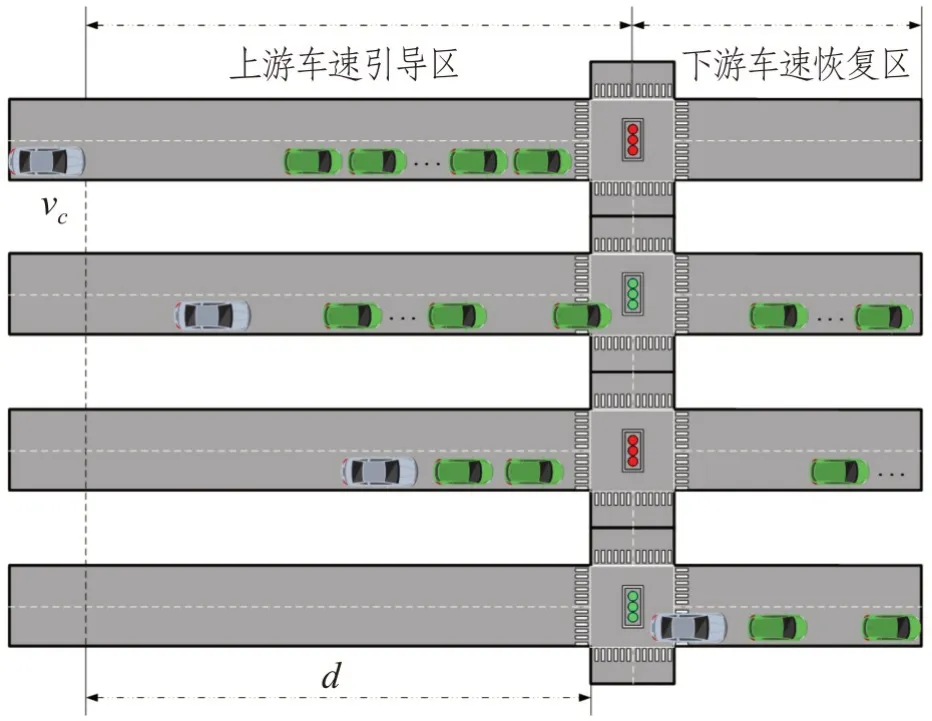
图3 目标车辆停车后通过交叉口示意图Fig.3 Schematic of target vehicle passing intersection after stopping
当第一个绿灯时间排队车辆无法消散,目标车辆继续保持低速行驶会与排队车辆冲突,车辆会减速加入排队车队,该工况判别式为:
式中:tu为目标车辆匀速行驶时间,s;ts为目标车辆停止时间,s;td1为目标车辆第一次减速时间,s;td2为目标车辆第二次减速时间,s;νb为目标车辆在不同时刻的速度,m·s-1。
2.3 轨迹生成算法
为了使车辆能够顺利驶过交叉口,车辆在进入交叉口上游车速引导区时就需要适当的加速或减速。本文采用Barth 教授提出的三角函数速度曲线模型,适用于加速后匀速通过与减速后匀速通过两种情况:
式中:νg为目标平均速度,m·s-1;νx为目标平均速度νg与当前车速νc之差,m·s-1;t为车辆运动过程的时刻,s;T为安全车头时距,s。
为使目标车辆不影响交叉口处的通行效率,规定车辆消散后,目标车辆会紧跟前方车队通过,μ和ρ为求解参数,车速曲线需要满足如下约束条件:
由于道路存在最高与最低限速,当三角函数速度曲线模型的匀速段速度νopt(t)≤νmin或νopt(t)≥νmax时,目标车辆减速段将采用基于二阶多项式的车辆减速模型[17],该模型减速过程中车辆的加速度数值变化曲线近似于一元二次函数;目标车辆加速段采用基于指数拟合的车辆加速模型,通过收集车辆速度和加速度数据,利用自然指数e拟合表达加速度与速度正向关系[18]。当目标车辆选择减速停车通过方式时,两种模型分别用于目标车辆减速段与加速段,表达式为:
对于配备该算法的智能网联车,当车辆到达上游车速引导区时,算法被激活,交叉口智能设施通过当前的信息计算前方车辆消散时间。当前方车辆可以在绿灯时间清空,智能设施会根据判断条件选择匀速、减速或加速方案;当前方车辆二次排队,智能设施会根据判断条件选择减速或停车方案。交叉口智能设施确定目标车辆行驶方案后,通过三角函数速度曲线模型计算车辆速度曲线,并判断速度曲线匀速段是否符合道路限速要求。当速度曲线匀速段符合道路限速要求,交叉口智能设施会通过三角函数速度曲线引导目标车辆通过交叉口;反之,交叉口智能设施会采用公式(18)、(19)重新计算车辆速度曲线,依照新曲线引导目标车辆通过交叉口。
为了保证车辆在运动过程中的安全性,目标车辆在行驶过程中与排队尾车的距离要大于最小安全车距,当目标车辆进入上游车速引导区且排队尾车未移动时,目标车辆行驶距离不大于目标车辆与排队尾车的最大间距;当排队尾车移动后,即目标车辆行驶距离不大于排队尾车行驶距离与目标车辆与排队尾车的最大间距之和,具体约束条件如下:
式中:s0表示最小车间距,m;xi表示第i次车辆排队长度,m;τ表示驾驶员反应时间,s;d表示目标车辆距离交叉口的距离,m。
在实际过程中,由于驾驶员反应时间的不同,排队车辆消散时间会有轻微波动,目标车辆按照优化轨迹行驶的过程中,可能出现与排队末尾车辆的车距小于最小安全车距的问题,此时目标车辆将会弃用当前行驶方案并迅速减速,切换为IDM 模型跟驰前方车辆行驶。生态驾驶策略流程如图4所示。
3 仿真实验及结果分析
3.1 仿真设置
SUMO(Simulation of Urban Mobility)可以通过Traci 接口使用Python 语言实现模型开发,实现对目标车辆的精准控制。本文应用SUMO 对提出的生态驾驶策略在单个信号交叉口场景进行了仿真研究,并评估优化前后目标车辆行驶轨迹以及车辆通过停止线的时间、油耗、排放三个影响因素的优化效果。实验参数如表1所示。

表1 仿真实验参数Tab.1 Simulation experiment parameters
选取基于VSP(Vehicle Specific Power)的油耗测算模型[19-20]对目标车辆仿真过程的总油耗进行测算,本文仿真对象为轻型车,在不考虑道路坡度的条件下,VSP的计算公式为:
式中:ν表示车辆瞬时车速,m·s-1;a表示车辆瞬时加速度,m·s-2。
瞬时油耗与车速具有相关性,可以通过车辆逐秒的VSP 数据进行聚类分析得到VSP 区间[21]。聚类区间与燃油排放率、CO2、CO、HC、NOx排放量间关系如表2所示,其总燃油消耗计算公式为:
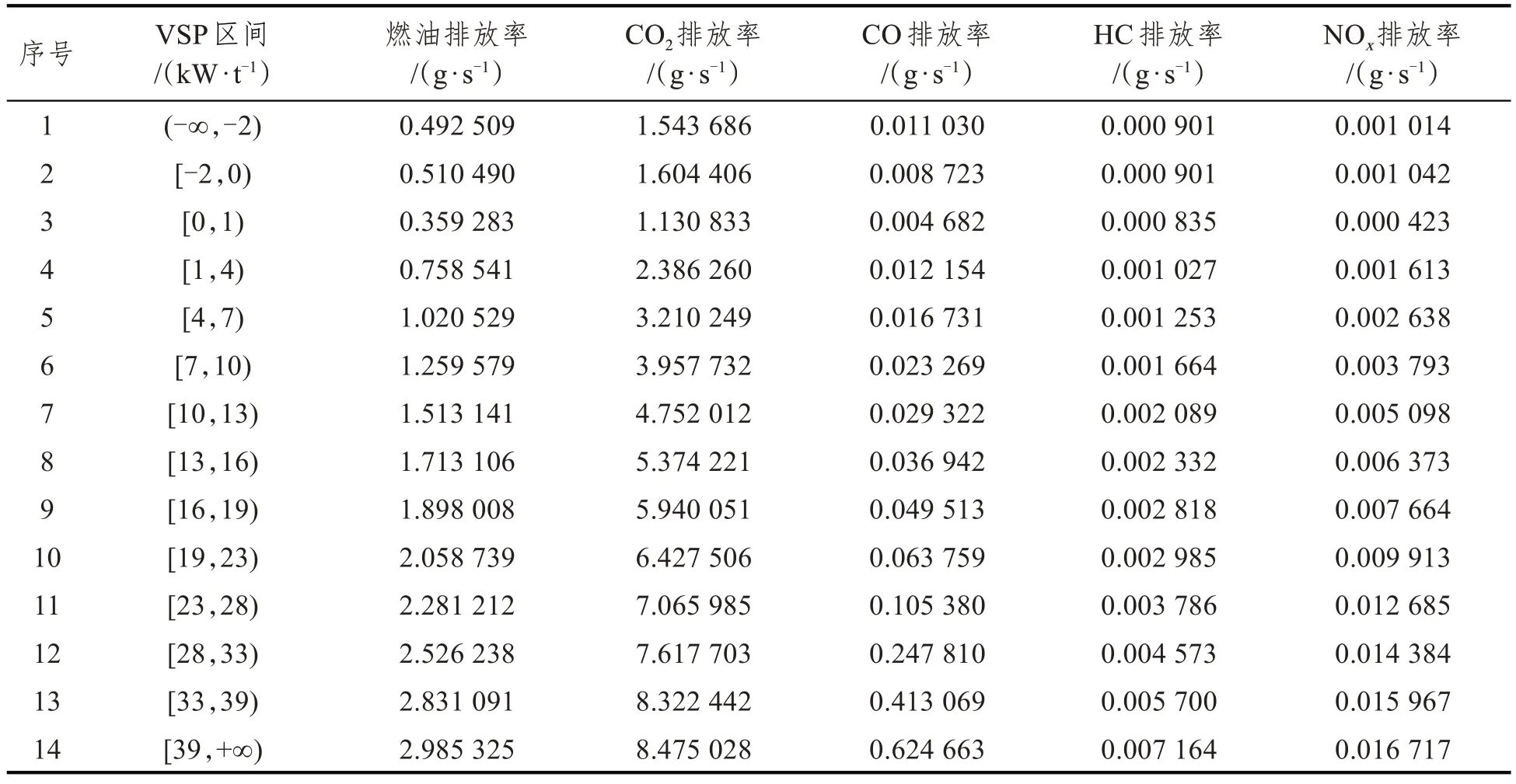
表2 不同VSP区间与燃油排放率、CO2、CO、HC、NOx排放量间的关系Tab.2 Relationship between different VSP intervals and fuel emission rate,CO2,CO,HC,and NOx emissions
式中:n表示VSP 区间的个数;fi表示VSP 区间是i的燃油排放率,g·s-1;Fm表示某段时间内的车辆总油耗,g;Νi表示VSP区间是i的总时间,s。
3.2 仿真结果分析
将仿真得到的生态驾驶数据与自由驾驶数据进行整合,得到优化前后目标车辆行驶轨迹,如图5所示。
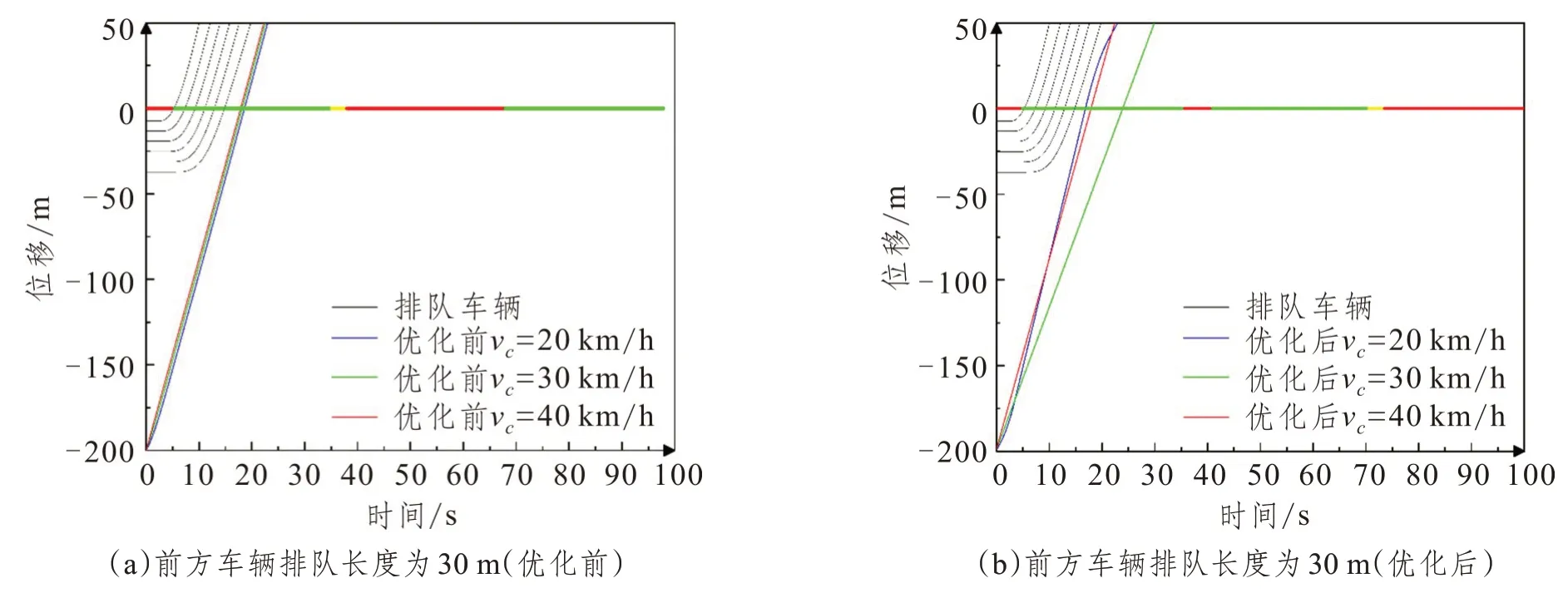
图5 优化前后目标车辆行驶轨迹Fig.5 Target vehicle trajectory before and after optimization
图(a)为优化前目标车辆行驶轨迹图,图(b)为优化后目标车辆行驶轨迹图,其他图同理。从图(a)、(b)、(c)、(d)可以看出,当红灯时刻目标车辆驶入交叉口上游的车速引导区且前方车辆排队长度为30 m、60 m时,目标车辆会受交叉口智能设施的控制进行生态驾驶,通过匀速或者适当加减速运动顺利驶过交叉口上游区域。在目标车辆初始速度不同的情况下,图(d)中目标车辆行驶轨迹在交叉口上游车速引导区更加集中,目标车辆没有因排队车辆干扰在行驶途中出现减速情况,车辆速度波动集中在交叉口下游车速恢复区。图(e)中目标车辆会在中途停车等待排队车辆的消散,最后跟随排队车辆驶离交叉口,而图(f)中目标车辆与前方排队车队尾车在行驶过程中未受到排队车辆的干扰,两车的车间距始终大于最小安全车距,目标车辆在速度引导过程中未出现停车现象,行驶轨迹更加平顺。在图(h)中,排队车辆虽然在第一个绿灯时间清空,但剩余的绿灯时间无法使得目标车辆通行,目标车辆将在下一个绿灯时间通过,相较于优化前,优化后的目标车辆停车次数从2 次减少到0 次,行驶轨迹未受到排队车辆的影响。从图(j)中可以看出,当排队车辆在第一个绿灯时间无法完全消散时,目标车辆不论选择匀速还是加减速的驾驶方式都会在交叉口前停车等待,直至下一个绿灯时间放行,此时目标车辆可根据号交叉口智能设施的引导提前缓慢减速,尽可能地减少停车怠速时间;当二次排队车辆开始消散时,目标车辆根据交叉口智能设施的引导进行缓慢加速,直至目标车辆恢复到初始车速;当目标车辆初始速度为40 km/h 时,其行驶轨迹与其余轨迹差别较大,这是由于目标车辆首先减速到道路最低限速行驶,如果目标车辆保持道路最低限速行驶将与排队车辆发生交通冲突,为了保证车辆在运动过程中的安全性,目标车辆会跟驰前方车队行驶。优化后目标车辆停车次数从2 次减少到0次,停车怠速时间更短。因此生态驾驶策略可以减少目标车辆由于缺乏前方交叉口环境信息而造成的急加速、急减速、排队停车等情况的发生。
不同车辆排队长度下,目标车辆优化前后燃油消耗与通过时间如图6 所示。图中横坐标为交叉口上游车辆排队长度,左侧纵坐标为目标车辆平均油耗,右侧纵坐标为目标车辆通过交叉口停止线时间。从图6可以看出,不论排队长度距离的变化,目标车辆生态驾驶的平均油耗均低于自由驾驶。当车辆排队长度为30 m 与60 m 时,目标车辆生态驾驶的平均油耗略高于90 m时的生态驾驶平均油耗。这是因为当交叉口上游排队车辆较少时,目标车辆需要加速通过交叉口,因此目标车辆的油耗略高。目标车辆如果采用自由驾驶,可能因模糊判断而进行频繁的加速和减速,导致燃油消耗增大。当排队车辆在第一个绿灯时间无法完全消散时,目标车辆进行生态驾驶与自由驾驶的平均油耗分别为0.079 17 g/m 和0.087 96 g/m,燃油消耗降低了9.98%。当出现车辆二次排队时,目标车辆进行生态驾驶与自由驾驶的平均油耗分别为0.107 20 g/m 和0.126 87 g/m,燃油消耗降低了15.5%。当车辆排队长度为60 m、90 m、105 m 与120 m 时,目标车辆进行生态驾驶通过停止线时间与自由驾驶大致相同,但车辆排队长度为30 m时,目标车辆初速度为30 km/h 通过停止线时间出现延后,这是因为目标车辆以30 km/h 初速度可以保持匀速行驶通过交叉口,使得通过停止线时间延后,但避免了不必要的加速行为。综上,该生态驾驶策略可以在保证行车效率的同时提高车辆燃油经济性。

图6 优化前后目标车辆燃油消耗与通过停止线时间对比Fig.6 Comparison of target vehicle fuel consumption and time to pass stop line before and after optimization
对目标车辆运动轨迹的排放情况进行统计分析,统计结果如表3 所示。对比统计数据可知,不论前方车辆是否清空,采用生态驾驶的目标车辆污染物排放量均有所降低。当前方排队车辆清空,生态驾驶的CO2、CO、HC、NOx平均排放量分别比自由驾驶降低了11.69%、20.14%、1.66% 和29.09%;当交叉口处出现车辆二次排队,生态驾驶的CO2、CO、HC、NOx平均排放量分别比自由驾驶降低了15.42%、27.51%、2.24%和36.15%。由此看出,该生态驾驶策略可以有效减少污染物排放。

表3 目标车辆的污染物排放情况Tab.3 Pollutant emissions from target vehicles
4 结论
本文考虑驾驶员反应时间对驾驶行为的影响对IDM 跟驰模型进行了改进,提出了一种考虑二次排队的智能网联车生态驾驶策略。选用三种目标初始速度与五种初始排队长度进行仿真验证,得到以下结论:
(1)与自由驾驶相比,该生态驾驶策略可以优化驾驶轨迹,减少车辆在交叉口处的停车次数,避免车辆在行驶过程中急加减速的产生。
(2)随着交叉口排队长度的增加,生态驾驶策略的优化效果愈加明显。当前方车辆二次排队时,采用生态驾驶策略的目标车辆总油耗降低了15.50%。
(3)当交叉口处出现车辆二次排队,生态驾驶比自由驾驶运动轨迹的CO2、CO、HC、NOx平均排放量分别降低了15.42%、27.51%、2.24%、36.15%。
(4)在后续工作中,可以进一步探究不同渗透率下智能网联车的生态驾驶策略。
猜你喜欢
作文周刊·小学一年级版(2020年40期)2020-10-19
汽车维护与修理(2018年1期)2018-04-04
重庆交通大学学报(自然科学版)(2017年3期)2017-05-17
娃娃乐园·3-7岁综合智能(2016年4期)2016-10-24
中国房地产业(2016年2期)2016-03-01
系统工程学报(2015年3期)2015-02-28
汽车维护与修理(2015年5期)2015-02-28
警察技术(2015年6期)2015-02-27
河南科技(2014年14期)2014-02-27
警察技术(2013年1期)2013-03-20