双频探地雷达探测道路地下空洞的试验与识别研究
2023-12-14 15:12吴永毅WUYongyi吴建良WUJianliang胡良军HULiangjun赵亚宇ZHAOYayu
价值工程 2023年34期
吴永毅 WU Yong-yi;吴建良③ WU Jian-liang;胡良军②④ HU Liang-jun;赵亚宇②④ ZHAO Ya-yu
(①广州市市政工程试验检测有限公司,广州 510520;②广州建筑股份有限公司,广州 510030;③湖南理工学院土木建筑工程学院,岳阳 414006;④广东省装配式地下结构检测与监测工程技术研究中心,广州 510520)
0 引言
随着城市地下空间的开发强度增大,在施工扰动、管道渗漏等的影响下,城市地下空洞引发风险呈现上升趋势。地下空洞坍塌对周边造成严重的破坏,引发人员伤亡、通行车辆陷落、地下管线断裂等安全风险。目前地下空洞检测一般采用探地雷达,3D 雷达快速排查,发现地下空洞隐患后,采用二维雷达对局部细化排查、确认。
探地雷达探测地下病害一直是道路工程的研究热点。目前相关规范给出了理想情况下地下空洞的探地雷达反射特征。在实际检测中基于探地雷达识别地下病害对操作人员要求较高,存在较大概率的漏判风险。人工智能识别技术的发展对自动识别地下空洞有较大的推动作用,但需要较大数量的样本库,而实际检测中往往检测长达几十公里的道路才可检出1-2 处。虽可以通过仿真生成样本,但通过检测实际道路空洞采集样本,仍旧无可替代。
本文通过建立道路地下病害实体模型,对典型的道路地下病害进行模拟,对多种工况下的道路地下空洞病害进行探地雷达检测,通过对探地雷达图像进行研究,掌握地下空洞病害的雷达反射特性,验证模型试验是否可行,为积累大量探地雷达识别地下空洞样本提供基础。
1 试验模型
为降低道路及地下空洞的模拟难度,采用围护墙加内部填充物的形式模拟道路及地下空洞,称为“卧式道路模型”。“模型”的围护墙墙体与道路结构相同,墙内采用砂土填充,砂土内可灵活设置空洞以模拟各种工况。模型的布置情况如图1。
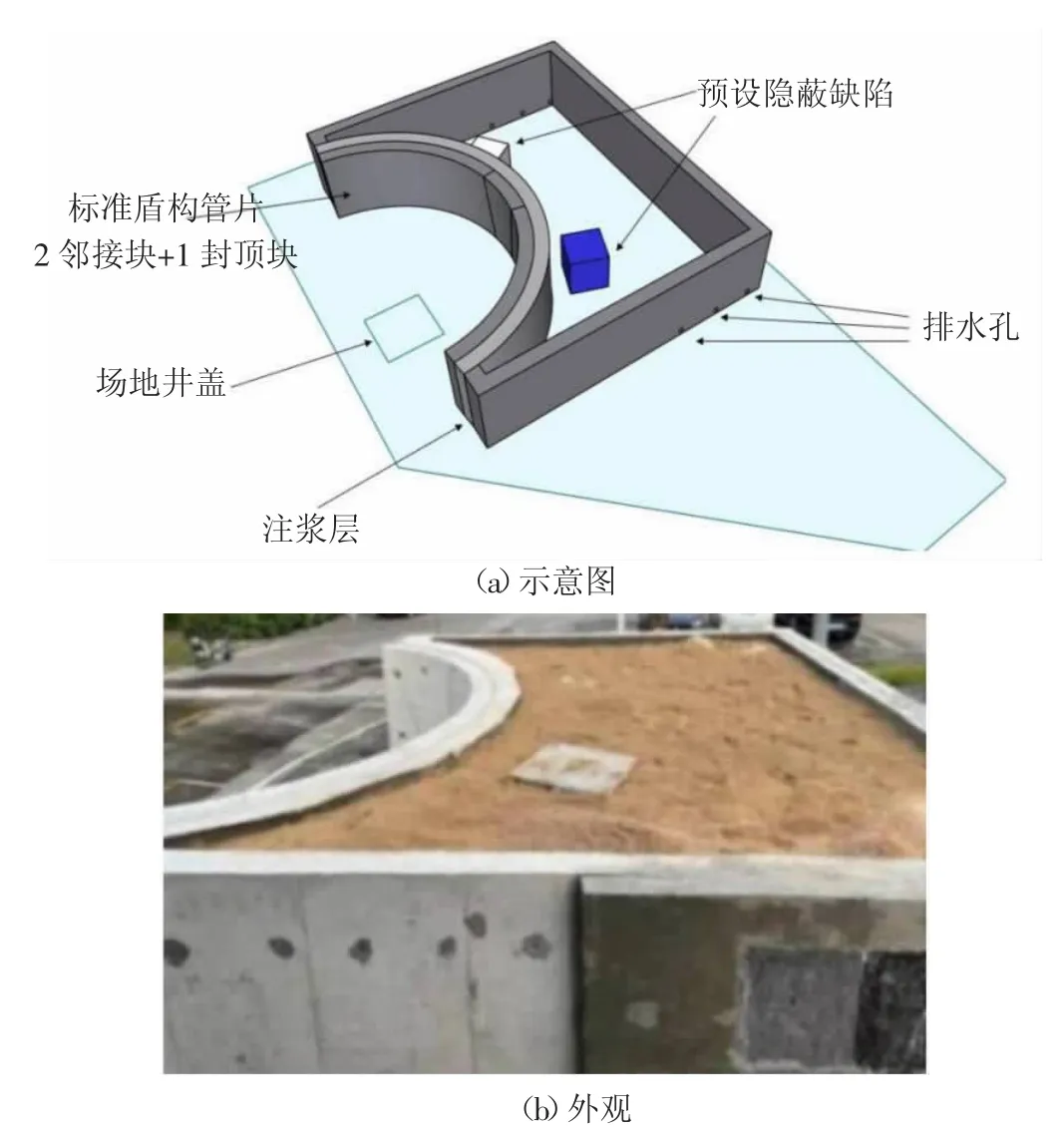
图1 卧式道路模型

图3 检测现场
图1 中,围护墙体左侧为圆弧状,模型平面整体呈E形,平面包络尺寸为8m×6.5m。围护墙体包括:40cm 的水泥稳定碎石基层模拟层,6cm 的水泥混凝土路面模拟层。路面模拟层局部镶嵌有2 处6cm×60cm×120cm 的沥青混凝土板以模拟沥青混凝土路面。
2 测试设备与方法
首先在模型内部填筑砂土、压实,采用人工挖孔与预埋亚克力模型2 种方式设置模拟地下空洞。缺陷设置完成后,采用超声波相控阵、双频探地雷达在模型维护墙表面进行检测。
采用的试验设备包括双频探地雷达、超声波相控阵。雷达采用ImpulseRadar 生产的CO1760 型高动态双频探地雷达,天线的中心频率为170MHz(LF)、600MHz(HF),工作时采样点数为414 点。超声波相控阵采用俄罗斯ACSYS 公司生产的MIRA A1040。
在模型右侧区域的2 个墙角设置有2 处空洞,右上角为空洞1,空洞边缘距离两面墙的距离为1.0m;右下角为空洞2,空洞边缘距离两面墙的距离为0.7m。空洞1 正对2 处沥青混凝土块区域,空洞2 正对墙体为水泥混凝土路面区域。
综合空洞与围护墙间隔及围护墙厚度,空洞1 的埋深为1.46m,空洞2 的埋深为1.16m。
首先采用超声波相控在缺陷正对墙体处、完整墙体处进行测试。探地雷达与沥青路面块的中线平齐,匀速水平移动,每工况下雷达测试重复试验3 次。

表1 检测工况
3 试验结果
3.1 超声波相控阵
超声波发射频率采用50kHz,超声波相控阵在不同位置测试典型结果如图4。
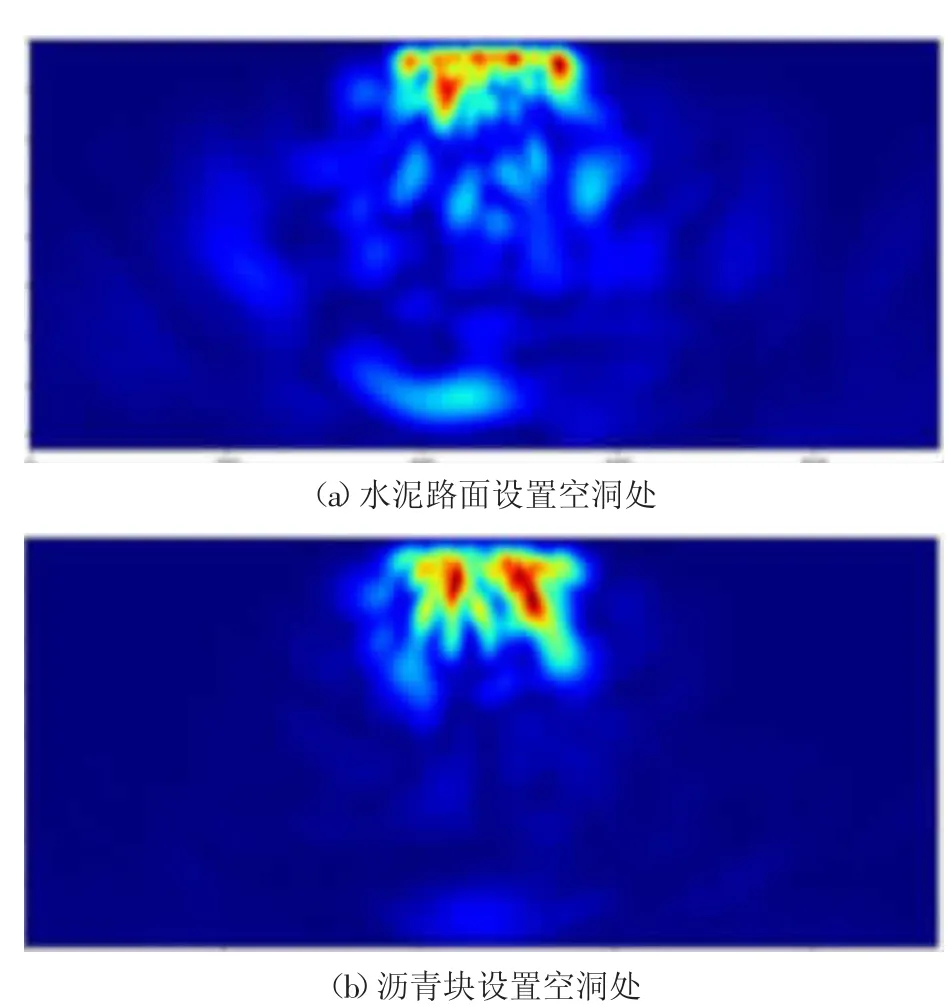
图4 超声波相控阵测试结果
从测试结果看,沥青块处相控阵结果中有较多的高亮反射,显示有较多的空隙与内部反射界面。水泥路面模拟区域因完整性较好,内部的高亮反射相对较少。
3.2 探地雷达检测
探地雷达检测时,测线围绕墙体做连续检测,每处空洞在2 面墙体各有一处成像。典型的整体检测结果图像如图5。

图5 工况2 的整体雷达图
600MHz 测试频率时,空洞典型的雷达成像图图6-图8,图中纵坐标为采用点数、横坐标为采样道数。
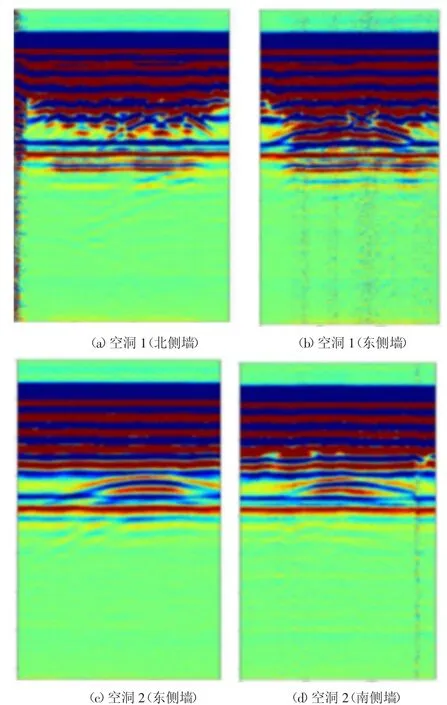
图6 工况1 的空洞处600MHz 测试结果
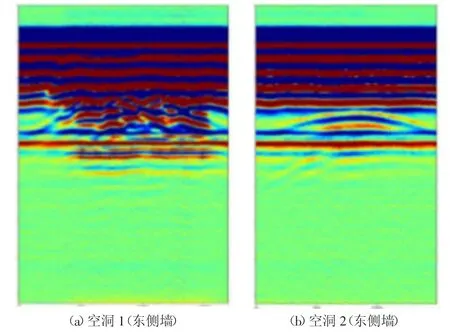
图7 工况2 的空洞处600MHz 测试结果

图8 工况3 的空洞处600MHz 测试结果
工况3 下170MHz 测试频率时,各个空洞典型的雷达成像图如图9。
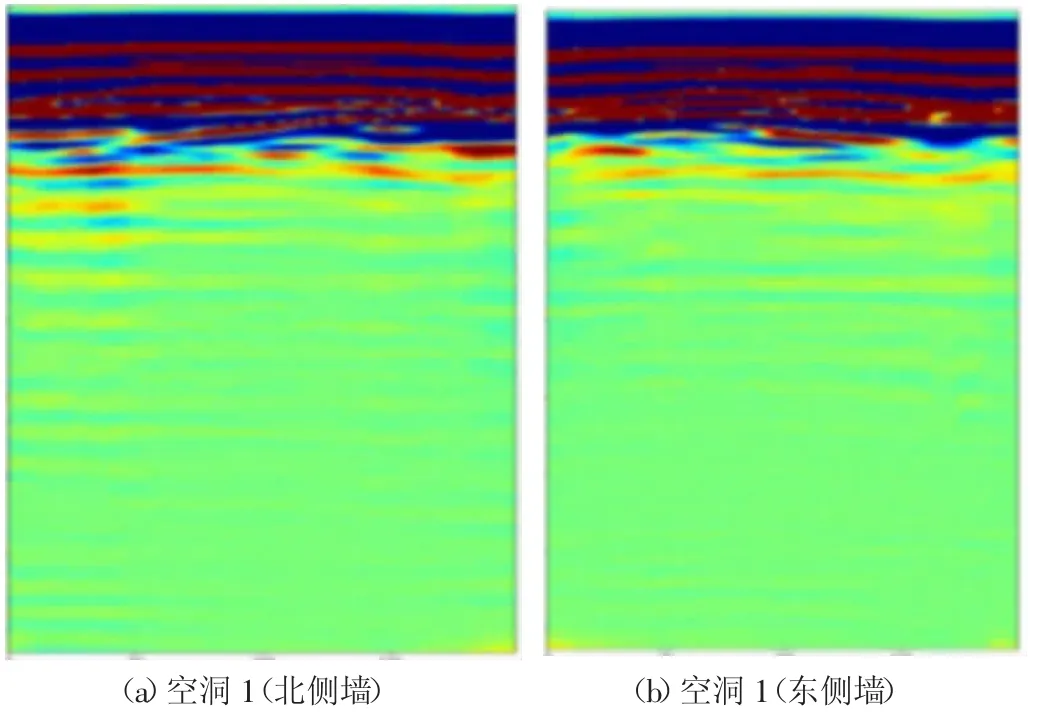
图9 工况3 的空洞处170MHz 测试结果
3.3 探地雷达检测地下空洞的讨论
从3.2 节可以看出,在600MHz 频率下,探地雷达能够识别出地下空洞,其雷达特征与日常检测中发现地下空洞类似。说明以“卧式模型”模拟道路及地下空洞可行。
雷达反射图中,未出现弧线形的墙背反射线,说明在较为松散的土体中,探地雷达的探测深度难以超过2.5m深度。
空洞2 处的墙面为整体浇筑而成,内部密实无不均匀,雷达反射波呈现较为明显的“月牙形”,即同向轴为向下开口的抛物线。
将东侧墙探测空洞2 时各工况缺陷中央的数据道提取出来,截取月牙形区域的数据段,汇总显示如图10。
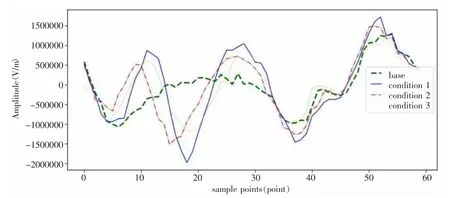
图10 东侧墙探测空洞2 的雷达波单道图
图10 中“base”为无空洞位置的数据道数据,其余道数据在10、30 点附近有2 处峰值,峰值即为空洞的反射。
空洞1 处的雷达波反射图形与空洞2 有明显不同,“月牙形”抛物线同向轴较不连续,特别是在北侧墙的成像“月牙形”较为零碎。
此外,空洞1 在“月牙形”回波的后续有一处较为明显的杂波发射,这是空洞对侧边界反射雷达波导致。若在探地雷达检测中发现“月牙形”抛物线同向轴回波后续有明显杂波,一般揭示有较大尺寸的异常体。
空洞1 处典型的雷达探测单道图如图11,图中数据为每道的第130-250 采集点数据。
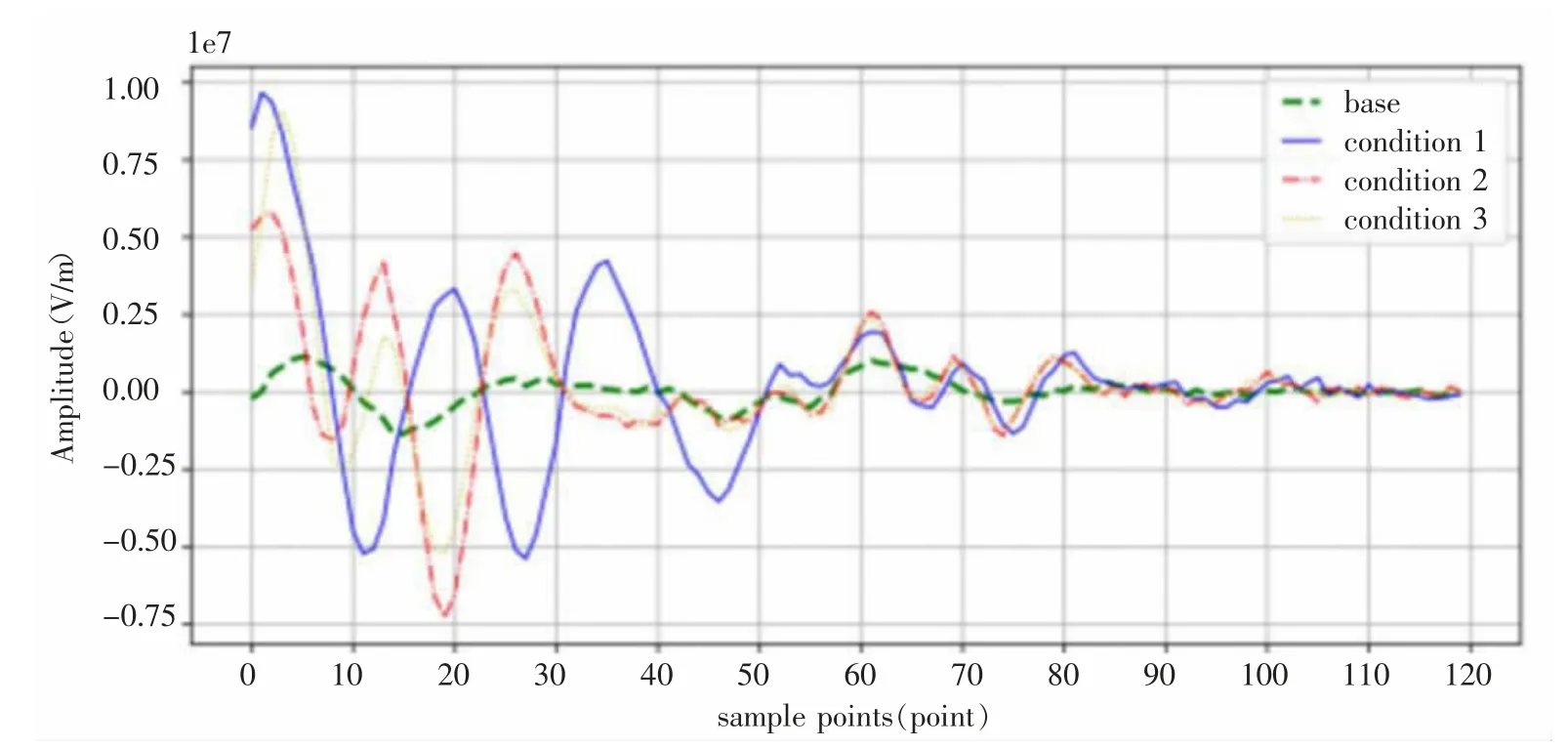
图11 东侧墙探测空洞1 的雷达波单道图
从图11 中可以看出,在10-40 采集点区间内基准道的反射信号振幅变化较小,而空洞对应道的振幅波动较大。在40-60 采集点处4 道信号数据趋同。但60-90 采集点区间空洞对应道的振幅波动再次增大,该波形对应于空洞底面的反射,而非西侧墙背的反射。
将工况3 四处空洞反射的波形汇总,图像如图12。
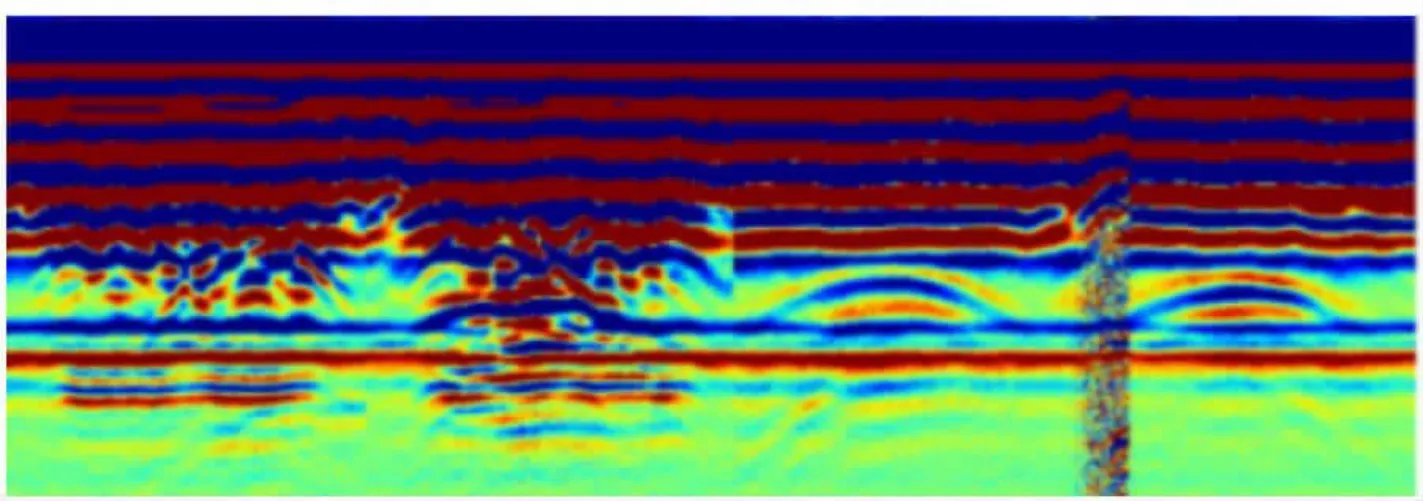
图12 工况3 四处空洞反射雷达图汇总
图12 中,量取空洞1 下部反射带的道宽度,量取空洞2“月牙形”同相轴后水平反射带的道宽度,反射带宽度分别为:564、565、276、280 道,与空洞的宽度成正比。因此,可以依据缺陷的反射带宽度作为探测空洞宽度的依据。
4 结论
通过建造“围护墙式”道路地下空洞模型,预设地下空洞,进行超声波相控阵、双频探地雷达测试。通过实验、数据分析,得出如下结论:
①采用卧式围护墙模型可以方便地预设地下空洞,不破坏雷达波的探测环境,为后续更加广泛的采集地下空洞的探地雷达样本提供基础。②600MHz 高频雷达波可以识别出预埋2.0m 深度内的地下空洞,空洞周围环境会对成像同相轴的形状产生影响。③较大尺寸的空洞在“月牙形”同相轴后多次反射雷达波,较小空洞仅产生“月牙形”同相轴而无后续发射波。④空洞反射带的道宽度与空洞的宽度成正比,可以作为探测空洞宽度的依据。
猜你喜欢
科技研究·理论版(2021年20期)2021-04-20
雷达学报(2021年1期)2021-03-04
电子制作(2018年17期)2018-09-28
通信电源技术(2018年3期)2018-06-26
军事文摘·科学少年(2016年7期)2016-09-20
电子制作(2016年21期)2016-05-17
水利科技与经济(2016年4期)2016-04-22
新闻传播(2015年20期)2015-07-18
河南科技(2014年5期)2014-02-27
世界科学(2013年11期)2013-03-11