适用于岸电系统的逆功率及故障控制策略
2023-12-25 05:50刘慧文邢宏伟房鑫炎李亦凡金力
电测与仪表 2023年12期
刘慧文,邢宏伟,房鑫炎,李亦凡,金力
(1.国网电动汽车服务有限公司,北京 100031; 2.上海交通大学电子信息与电气工程学院,上海 200240)
0 引言
岸电系统的双侧,岸侧变频电源以及船侧电力系统,处于异频运行状态。船舶设备运行频率为60 Hz,而我国港口岸电设施运行于工频50 Hz。由于频率不同,并网过程往往伴随着较大的功率冲击,出现逆功率现象,降低岸电系统给船舶负荷的供电质量,导致岸船两侧电气设备损坏及并网失败。
现有的对于逆变器保护的研究,一般集中在不同新能源接入的场景中,如大容量分布式接入对于电流保护的影响[1]以及通过相位控制对电流保护的改进方案[2],含分布式电源的电网快速适应型自愈技术[3]。也有的研究认为分布式电源接入后,电流保护受到逆变器的影响较大,因此应该配置距离保护,与电流保护相配合对系统进行保护[4],或者应该采用纵联保护作为多点新能源接入的主保护[5]。同时,也有一部分研究分析分布式电源接入后故障时,电网的故障模型以及模型中电气量的故障特性,如针对小电阻接地方式的配电网单向接地故障[6],针对MMC-HVDC 直流侧极间短路故障[7]以及换流器桥臂短路故障[8]的故障建模与特性分析,考虑了PQ 控制模式特性的逆变型分布式电源故障模型[9]。为了防止发生故障时新能源脱网造成较大的功率、频率波动,逆变器要具有一定的电压支撑能力,有一部分研究在逆变器故障模型中计及逆变器故障后的电压恢复能力[10-11],给出更为贴合实际的故障模型。
但是岸电系统跟新能源有一定区别,新能源并网的研究核心一般在于从孤岛模式向并网模式切换,但这些切换方式在岸电系统中并不适用,岸电系统涉及到船舶的并网、离网以及负荷转供过程,船舶的柴油发电机组与岸侧的变频电源并不是单一的对等或者主从关系,因此对新能源并网场景的保护研究不能直接迁移到岸电系统保护的研究上。同时对于专门岸电系统保护的研究比较少,且集中在针对船侧保护的改进中[12],岸电系统保护的信息采集系统的设计上[13],或者是岸电系统故障诊断的数学模型[14],没有根据岸电系统的特性,提出专门适应于岸电系统的保护方法。
文中基于上述诸多针对新能源接入场景的逆变器控制策略以及保护方法研究,结合岸电系统的特点,提出针对岸电系统的逆功率现象以及故障后岸侧无法快速恢复负荷供给现象的控制策略。通过实时检测电流互感器中的电流流向以判断逆功率现象是否发生,根据逆功率不同种类采用不同的电压幅值、频率控制策略调整变频电源的输出电压,以消除逆功率现象;通过故障时调整变频电源电流内环控制的参考值,提高变频电源输出的无功功率,对并网点电压进行支撑,完成故障后的快速电压恢复,防止脱网现象发生。该策略的创新性在于合闸时可以快速抑制逆功率现象,完成负荷平稳转供;在故障后改变对变频电源的控制策略,快速恢复对船侧负荷的供电。避免了故障时直接切断船岸双侧系统连接引起的巨大波动,保护两侧电力设备不受到损坏,实现岸电系统的安全、稳定运行。
首先对岸电系统的预同步控制结构以及变频电源控制模式进行分析,其次分析岸电系统的逆功率发生原因与电气量特征,以及并网点故障后电气量特征。根据并网环节的故障特性以及荷转供过程中的故障特性,提出逆功率检测模块的逻辑实现及控制手段与变频电源的故障控制方案。并搭建Simulink 仿真模型对两种策略进行验证。
1 岸电系统模型
船舶并网主要涉及到岸电系统的两个核心部分:预同步控制模块以及岸侧变频电源模块。预同步控制模块负责并网前对岸侧以及船侧的电压幅值、频率进行跟踪,并将修正值传至变频电源模块,帮助变频电源模块调整输出,完成双侧系统的顺利并网以及稳定的负荷转供。
1.1 预同步控制模式
在船舶并网前,岸船两侧的电压、相位以及频率应该接近相等,为了增加岸电的可连接船舶种类,通过调节岸侧变频电源的电压幅值与相位,使得岸侧变频电源对船侧柴油发电机进行“跟踪”,当电压的幅值与相位达到一致时完成并网动作。
岸电系统的预同步控制系统结构如图1 所示。
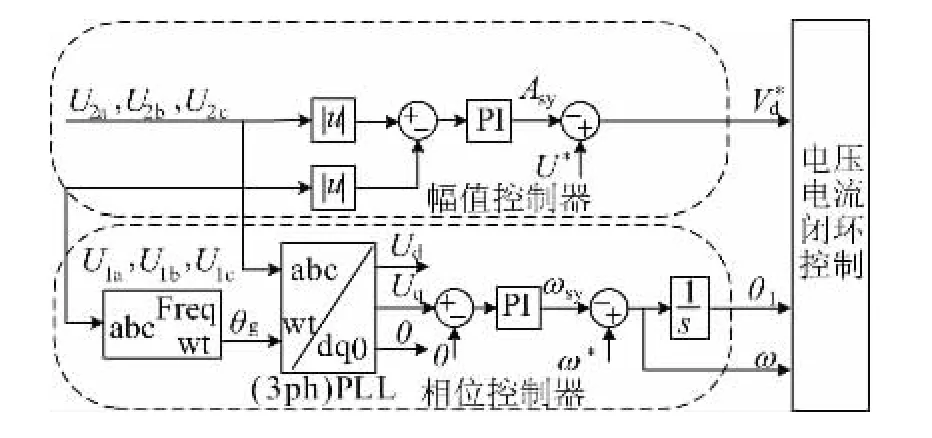
图1 预同步控制系统结构图Fig.1 Structure diagram of pre-synchronous control system
预同步控制系统共有两个部分组成,幅值控制器与相位控制器。
幅值控制器获取岸侧变频电源的三相电压U2a,U2b,U2c幅值以及船侧的三相电压U1a,U1b,U1c幅值,通过PI 控制器不断缩小两者差值,并将差值计入参考电压U*中,将该幅值误差的修正参考电压V*d,作为后续电压电流双闭环控制的输入整定值,从而不断修正变频电源输出电压幅值。
相位控制器在并网前,利用锁相环获取岸侧变频电源电压Uc和船舶电网侧运行电压相角θg,以θg为输入角对Uc作旋转坐标变换,目标是尽量减小并网时岸船两侧电压相位差,即θg与Uc的相位θc之间的差值应该尽量小,如图2 所示。

图2 相位控制示意图Fig.2 Schematic diagram of phase control
即控制旋转坐标系中的Uc在q 轴上的分量Ucq为零。角频率是相位的微分,因此相位间的差值可以视为图中角频率ωc与角频率ωg之间的差值,同样的,将该差值计入角频率参考值ω*中,将修正参考角频率ω作为后续电压电流双闭环控制的输入整定值,从而不断修正变频电源输出电压相位。
1.2 岸电变频电源控制模式
在船舶并网后,岸侧的变频电源系统一般采用下垂控制策略对变频电源的有功、无功功率输出进行控制。在船舶并网后,岸电系统的等效电路图如图3 所示。
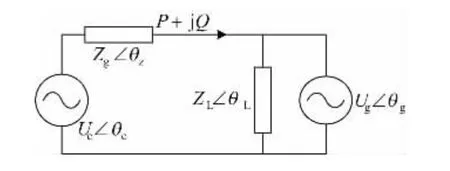
图3 并网后岸电系统等效电路图Fig.3 Equivalent circuit diagram of shore power system after grid connection
图3中,Uc与θc表示岸侧变频电源系统电压的幅值与相角,Ug与θg表示船侧电力系统电压幅值与相角,Zg与θz表示岸电系统连接线的阻抗值与相角,ZL与θL表示船侧负荷的阻抗值与相角。
则并网后变频电源的有功、无功功率可由式( 1)计算:
由于岸电系统中,连接线主要呈感性,且预同步模块使得合闸后两侧电压相位差较小,故可以做出如下近似处理:
从而得到化简后的岸侧变频电源输出的有功、无功功率如下:
由上式可知,变频电源输出的有功功率主要受到输出的电压相角控制,输出的无功功率主要受到输出的电压幅值控制。类似地,角频率是输出电压相角对时间的微分,因此可以通过控制角频率从而达到对输出电压相角的控制。由此形成下垂特性如式(4) 所示:
式中ωn、En、Pn、Qn分为额定的角频率、电压、有功功率和无功功率; ω、E、P、Q分为实际的角频率、电压、有功功率和无功功率;m、n分别表示有功-频率下垂系数与无功-电压下垂系数。
由此,可以得到如图4 所示的岸侧变频电源下垂控制系统。
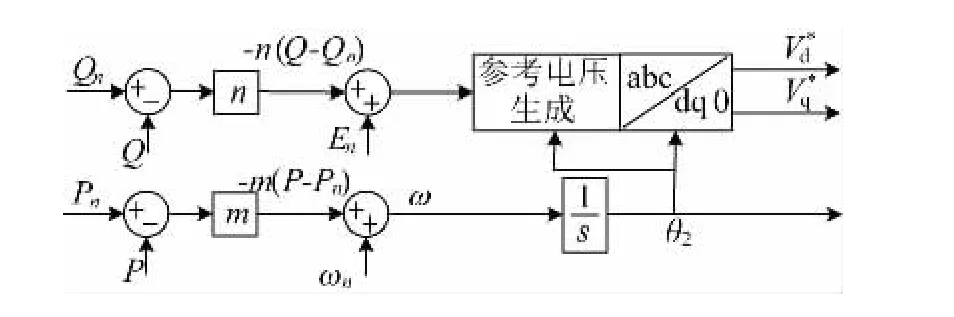
图4 变频电源下垂控制结构图Fig.4 Structure diagram of variable frequency power supply droop control
2 逆功率以及故障控制策略
2.1 逆功率控制策略
岸电系统中逆功率现象主要出现在岸船并网以及解列的过程中,由岸侧变频电源的输出电压与船侧柴油发电机的输出电压的幅值、频率不匹配所引起。逆功率现象及其性质如表1 所示。
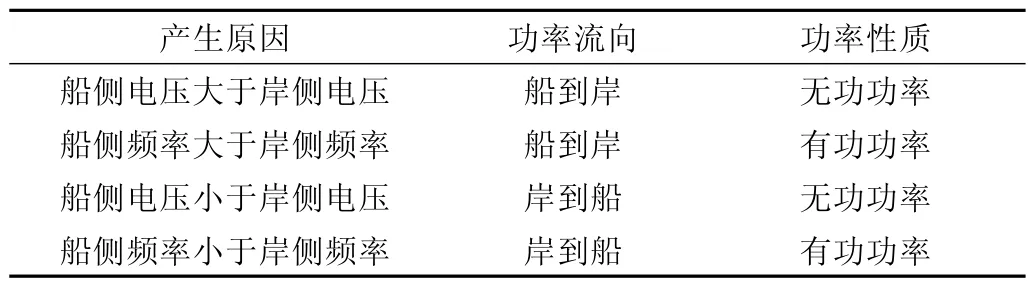
表1 逆功率现象及其产生原因Tab.1 Reverse power phenomenon and causes
现实工况中,当电压幅值差值小于5%,相位角差值小于10°,即符合并网条件。因此在合闸时岸侧与船侧的电压幅值、频率、相位并非完全相同,从而导致并网瞬间产生逆功率现象。
在出现逆功率现象的情况下,系统没有运行于稳态,若直接切断船侧与岸侧的连接,容易导致更为剧烈的功率波动。因此需要在岸电系统中设置逆功率保护装置,实时检测电压、电流波形,进行潮流计算以及判断功率流向,当出现逆功率现象且达到阈值的情况下,根据不同逆功率的种类,采取不同的控制手段。适用于岸电系统的逆功率保护装置结构图如图5 所示。

图5 逆功率保护装置结构图Fig.5 Structure diagram of reverse power protection device
因此,对于逆功率现象,可以通过调整变频电源的运行参数以改变输出电压的幅值、频率从而消除逆功率现象。
如图5 所示,在负荷转供过程中,电流互感器TA1检测到图中电流I1的方向为从船侧到岸侧( 图中虚线箭头方向) ,此时信号采集与处理模块会向变频电源控制模块发出控制信号,直至电流互感器TA1检测到电流I1流向变为从岸侧流向船侧( 图中实线箭头方向) 。
对于从岸侧流向船侧的逆功率现象,即电流互感器TA2检测到图中电流I2的方向为虚线箭头方向,可以通过电流互感器TA2检测到的电流I2以及电压互感器TV3检测到的电压U2计算逆功率大小。同样的,调整变频电源的输出电压直至电流互感器TA2检测到电流I2流向变为从岸侧流向船侧( 图中实线箭头方向) 。
具体的控制策略为一时间线性函数,如式(5) 所示:
式中T表示参数; 下标shore、ship 分别表示岸侧、船侧;tstart表示控制开始的时刻;t表示当前时刻;k为调节变化率大小。
由分析可以得出逆功率保护控制策略,如图6 所示。

图6 逆功率保护控制策略Fig.6 Reverse power protection control strategy
2.2 故障控制策略
当两侧并网线路故障时,并网点的电压发生跌落,需要通过调整电流内环控制的参考值,使岸侧变频电源持续输出无功功率支撑并网点电压,保持船舶与岸电系统的连接与岸电系统对于船侧负荷的供电能力。德国的E.ON 标准制定了低电压穿越期间电压跌落深度与变频电源输出无功电流之间的关系[15],而在岸电系统中,可以借鉴低电压穿越的要求,变频电源需要供给船侧负荷的无功部分,因此将上述条件修改成当电压跌落深度小于10%,逆变侧输出正常工作状态下的无功电流。
岸侧变频电源中,整流侧采用三相不可控整流,逆变侧为可控部分。正常运行模式下,逆变侧采用前文所述的电流内环、电压外环控制,将ABC 三相静止坐标系中的电气量向d、q 旋转坐标系进行投影,将电压外环控制的输出作为解耦后电流内环控制的id,iq参考值。
当出现故障使得并网点电压跌落,故障切除后,电压仍然处于跌落状态,控制模式应该迅速切换至岸侧变频电源优先对无功电流进行控制,即id,iq的参考值从电压外环控制的输出变为给定的电流值i*d,i*q ,并根据电压跌落深度的不同进行不同的控制,具体控制函数如下:
式中UN,IN为变频电源额定电压和额定电流;iqN与idN分别为正常工作状态下电流内环控制的参考值。
由式(6) 得到的i*d,i*q可以在发生故障时作为电流内环控制的d、q 轴电流给定值,使得逆变器在故障期间向并网点注入无功功率,抬高并网点的电压,实现了变频电源逆变侧对并网点电压跌落的支撑,帮助快速恢复岸侧变频电源对船侧负荷的供电。
3 仿真验证
为了验证文中提出的逆功率控制策略以及故障控制策略的有效性,在MATLAB/Simulink 平台上搭建岸电系统模型,并结合华东某远洋港口电力设备实际情况以及船舶的实际参数,进行两种策略的仿真,并分析得出结论。具体仿真模型参数如表2 所示。
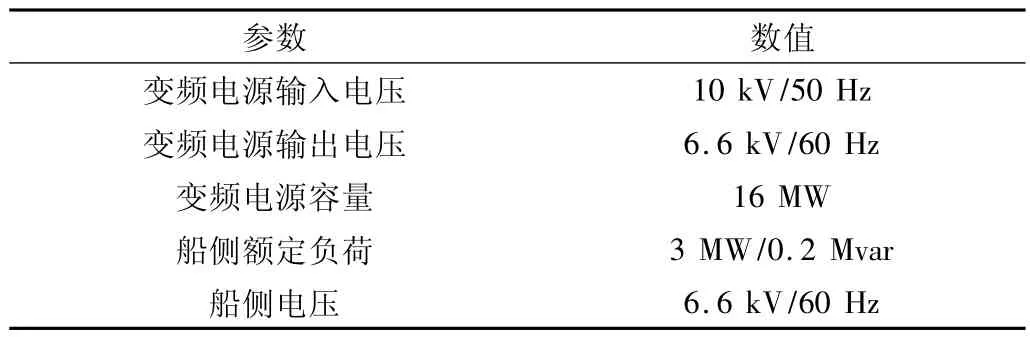
表2 仿真参数Tab.2 Simulation parameters
3.1 逆功率控制策略仿真验证
逆功率保护控制仿真时长共2.5 s,0 -0.2 s 为岸侧变频电源与船侧电力系统单独运行; 0.2 s -0.6 s为并网前的预同步过程,预同步控制系统工作;岸侧与船侧于0.6 s 合闸,同时逆功率控制模块检测到由岸侧流向船侧的逆功率,动作,对逆功率进行抑制,于2 s 时完成岸侧变频电源对船侧负荷的供电。
岸侧变频电源的输出功率波形如图7 所示。
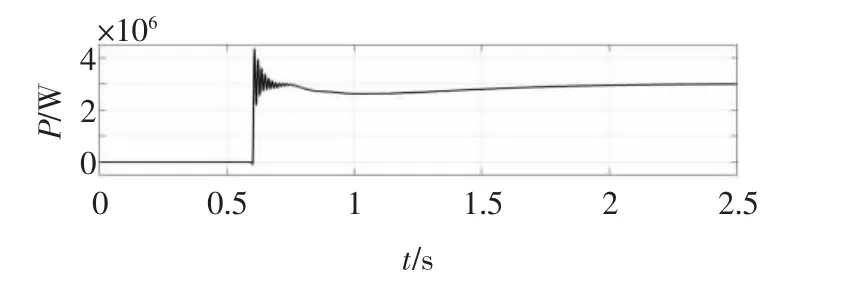
图7 变频电源输出功率Fig.7 Output power of frequency conversion power
如图7 所示,于0.6 s 合闸后,岸侧变频电源瞬时输出功率达到4 MW,当检测到逆功率出现时,逆功率控制模块动作,对变频电源输出的电压、电流进行抑制,变频电源的输出电压、输出电流波形如图8、图9所示。
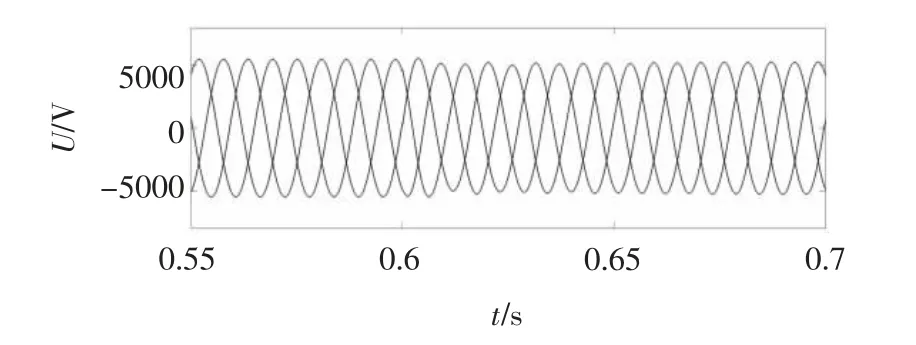
图8 变频电源输出电压Fig.8 Output voltage of frequency conversion power
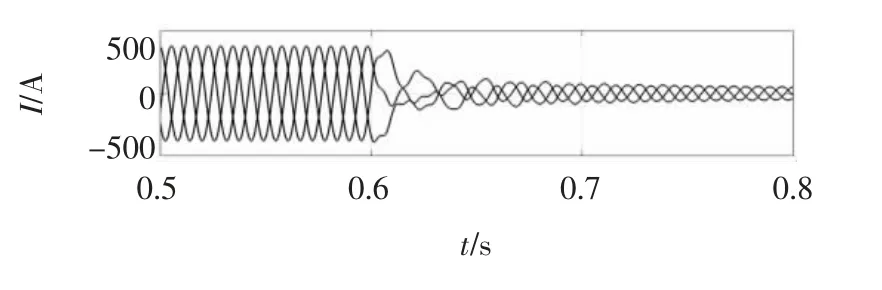
图9 变频电源输出电流Fig.9 Output current of frequency conversion power
由图8、图9 可见,当出现逆功率时,逆功率保护控制动作,调整变频电源的输出电压幅值以及输出电流幅值,于图中0.61 s 处可见较为明显的调整动作,以快速适应船侧额定负荷值3 MW,且整体逆功率控制策略于0.1 s 内完成对变频电源输出功率的调整,完成了对于逆功率现象的快速且有效的消除。
3.2 故障控制策略仿真验证
故障控制策略仿真于船侧负荷全部由岸侧变频电源供电后继续,于2.5 s 时合闸点发生三相短路,故障于2.53 s 切除,后采用上文所述的低电压控制策略进行合闸点的电压支撑以及对船侧负荷供电的恢复。
仿真期间合闸点三相电压波形如图10 所示。
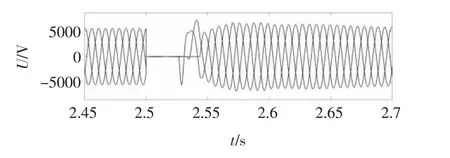
图10 故障后合闸点三相电压Fig.10 Three-phase voltage at the closing point after the fault
由图10 可见,故障切除后,三相电压发生振荡,同时进行故障控制,合闸点三相电压快速恢复,于2.57 s时合闸点三相电压已经恢复到额定电压的90%; 于2.6 s时已经基本到达稳态,此时伴有较小的电压波动;于2.7 s 已完全恢复稳态。
仿真期间变频电源支撑合闸点电压恢复而输出的无功功率以及有功功率如图11、图12 所示。
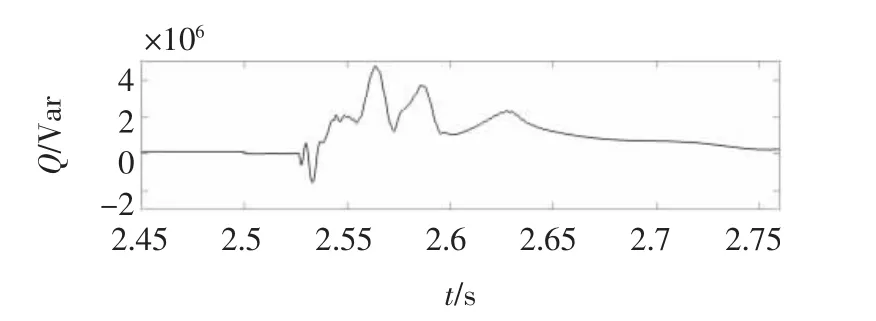
图11 故障后变频电源输出无功功率Fig.11 Frequency conversion power output reactive power after the fault

图12 故障后变频电源输出有功功率Fig.12 Frequency conversion power output active power after the fault
如图11、图12 所示,变频电源的输出无功功率同样在故障切除后发生振荡,随后增加输出的无功功率,开始对合闸点电压进行支撑。当电压恢复到额定电压的90%后,变频电源输出的无功功率开始下降,重新回到适应船侧负荷的0.2 Mvar。变频电源输出的有功功率同样在2.65 s 时恢复到了3 MW,重新恢复对船侧负荷的供电。
作为对比,在不采用故障控制策略的情况下,故障切除后合闸点三相电压以及变频电源输出有功功率如图13、图14 所示。
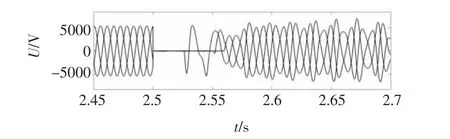
图13 故障后无控制策略合闸点三相电压Fig.13 Three-phase voltage at the closing point after the fault without control strategy
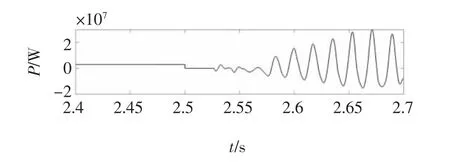
图14 故障后无控制策略变频电源输出有功功率Fig.14 Frequency conversion power output active power after the fault without control strategy
通过图13、图14 与图10、图12 的对比可见,在没有使用故障控制策略时,电压抬升到一定程度便开始发散,岸侧变频电源输出有功功率同样发散,会触发断路器断开两侧连接。
而使用故障控制策略,则可以有效地在故障后供给无功功率帮助合闸点的电压抬升到额定工作值,也迅速恢复岸侧对于船侧负荷的功率供给。
4 结束语
文中结合岸电系统特点,针对现有的岸电系统故障控制策略研究的缺失,提出适用于岸电系统的逆功率控制策略以及故障控制策略,通过仿真验证,得出如下结论:
(1) 文中提出适用于岸电系统的逆功率控制策略以及逆功率保护装置结构,根据该策略对岸侧变频电源的电压与电流进行调整,实现时船舶并网时对逆功率现象的快速抑制,提高对于船侧负荷的供电质量;
(2) 故障控制策略在发生电压跌落时,提高岸侧变频电源输出的无功功率,有效实现对合闸点的电压支撑,并使岸侧变频电源快速恢复对船侧负荷的供电,重新运行于稳态。
猜你喜欢
山东冶金(2019年3期)2019-07-10
消费导刊(2018年10期)2018-08-20
设备管理与维修(2016年7期)2016-04-23
通信电源技术(2016年1期)2016-04-16
电测与仪表(2016年20期)2016-04-11
电测与仪表(2015年20期)2015-04-09
水电站机电技术(2014年4期)2014-10-13
自动化博览(2014年4期)2014-02-28
河南科技(2014年23期)2014-02-27
河南科技(2014年4期)2014-02-27