联合距离方位二维NCS的星弹双基前视SAR成像算法
2024-01-02 12:19刘裕洲蔡天倚李亚超王选琪安培赟
雷达学报 2023年6期
刘裕洲 蔡天倚 李亚超* 宋 炫 王选琪 安培赟
①(西安电子科技大学雷达信号处理全国重点实验室 西安 710071)
②(北京遥感设备研究所 北京 100039)
1 引言
相比于传统光学、红外和单脉冲雷达[1]等遥感技术,合成孔径雷达(Synthetic Aperture Radar,SAR)能够全天时、全天候、远距离、主动并且持续地对目标区域高精度成像。因此,各国军事部门逐渐将SAR技术应用在导弹的末制导阶段,提升导弹对高价值目标探测、识别和精准打击能力[2]。星弹双基前视SAR能突破传统单基弹载平台无法前视成像的限制[3],利用生存能力强的在轨卫星发射雷达信号并提供方位向分辨能力,导弹前视静默接收目标区域散射信号进行成像处理,得到前视区域SAR图像,进而获取目标制导信息。然而,由于弹载平台前向速度大,星载平台多普勒贡献弱而需要更长的积累时间,导致距离徙动(Range Cell Migration,RCM)较大且空变严重,同时,双基前视SAR的方位调频率存在二维空变性,使得星弹双基前视SAR在实际应用中存在困难。
双基前视SAR成像算法主要有频域算法[4–8]和时域算法[9,10]。时域算法通常指后向投影(Back Projection,BP)算法[11]及其改进算法[9,10,12],对平台的运动轨迹无约束,是最精确的SAR成像方法,但BP算法复杂度也是SAR成像算法中最高的。快速分解BP (Fast Factorized BP,FFBP)算法[13]利用子孔径分解和并行处理,可以一定程度上提升运算效率。然而,FFBP在实际应用中面临存在子孔径划分和子图像融合的问题,达不到理论上的效率提升,并且成像效果受平台运动误差影响大[14],难以应用在大成像幅宽且实时性要求较高的星弹双基前视SAR成像中。频域算法利用快速傅里叶变换实现时频变换,在大成像幅宽和大数据量的成像任务中,效率远高于时域算法。频域算法包括距离多普勒(Range Doppler,RD)算法[4,15,16]、线调频变标(Chirp Scaling,CS)算法[17,18]和Omega-K算法[19,20]。其中,RD算法不考虑成像参数的空变,仅使用参考点的成像参数进行处理,偏离参考点的区域成像效果不理想[15]。Omega-K算法使用无近似的距离模型和Stolt插值,是一种较为精确的SAR成像算法,但要求平台运动速度不变[21]。改进的Omega-K成像算法[22]考虑了平台加速度的影响,通过对信号二维频谱进行补偿实现平台具有小加速度下的双基前视SAR成像,但不适用于加速度较大的弹载SAR成像。同时,精确的Omega-K算法依赖Stolt插值,其较高的运算量不利于弹载SAR的实时成像[21]。CS算法利用Scaling原理[17],通过引入变标函数对信号进行频率调制,均衡双基前视SAR中RCM的线性空变,均衡调频率的空变或非线性的空变则需使用非线性变标[23–25](Nonlinear Chirp Scaling,NCS)算法。NCS算法最早被运用于均衡双基SAR的方位调频率,Wong等人[26]通过引入3次变标函数均衡方位调频率的线性空变。Qiu等人[27]提出多项式拟合的变标函数可以使NCS算法适用于双基角较大的情况,但无法补偿双基前视SAR中的高阶空变项。Wu等人[28]提出一种扩展的方位NCS算法,通过多项式拟合多普勒中心和方位调频率随方位聚焦位置的变化,引入变标函数均衡多普勒中心和方位调频率的空变。Mei等人[29]提出一种在频域引入变标函数的方位NCS算法,通过分析方位调频率和方位3次调频率随方位聚焦位置的变化,使用3次和4次变标函数均衡空变相位。然而,这两种NCS算法[28,29]忽略了残余RCM的空变,并且未考虑接收平台加速度引起信号方位带宽减小的问题。因此,目前双基前视SAR成像的NCS算法主要局限于方位向空变处理,距离向处理则使用Keystone变换,运算量较大且不能处理空变的非线性RCM,不能直接应用在星弹双基前视SAR成像中。
鉴于此,本文针对星弹双基前视SAR中较大且空变的RCM和二维空变的方位调频率,提出一种联合距离NCS和方位NCS,从距离向和方位向两个维度消除空变的成像算法。所提算法的流程为:首先,通过距离预处理缓解距离向与方位向的耦合并恢复信号方位频谱。然后,在距离多普勒域引入变标函数,利用几何关系得到距离向空变关系,以此均衡RCM和距离调频率。其次,通过分离收发机的方位调频率,引入变标函数均衡方位向空变后构造二维方位聚焦函数,最终使回波信号能量聚焦。相比已有的双基前视SAR成像算法[15–18,24,28,29],所提算法利用距离预处理和距离NCS,消除导弹加速度对信号方位频谱的影响和校正空变的RCM和距离调频率,有利于大距离幅宽场景的实时成像处理,同时,所提算法利用方位NCS,能够对高阶空变的方位调频率进行有效处理。本文所提算法创新点在于联合距离向和方位向两个维度上利用NCS算法对回波数据进行处理,是一种二维NCS算法,而目前已有的双基前视SAR成像NCS算法[24,28–31]是方位单维度的NCS算法,处理距离空变的能力有限。因此,在本文的点目标和场景仿真部分,不同算法的成像结果验证了所提算法比参考算法[26,29]更适用于星弹双基前视SAR成像。
2 回波信号模型及其距离多普勒频谱
星弹双基前视SAR如图1所示,卫星和导弹分别位于M(0,yt,ht)和N(0,yr,hr)。卫星对目标区域进行大范围照射,导弹前视接收成像场景散射的雷达回波。以导弹在地面的投影O为原点建立笛卡尔右手坐标系。以地面为XOY平面,定义卫星发射机速度为vt,其方向为X轴正方向,接收机在Y方向正向速度和沿Z方向下降速度的大小分别为vry和vrz,其合速度为vr,其方向指向地面上的C点,其沿速度方向的加速度为av,其在YOZ平面垂直于速度方向的加速度为a⊥。以C点作为导弹接收回波的成像场景中心。发射机和接收机波束的下视角分别为φt0和φr0。P为场景中任意点目标,位于(xp,yp,0)。

图1 星弹双基前视SAR几何构型Fig.1 Geometry configuration of spaceborne-missile bistatic forward-looking SAR
使用低轨卫星作为发射机,其高度为ht,其星下点O′位于Y轴上yt的位置。在合成孔径时间内,可忽略低轨卫星的向心加速度,其飞行轨迹视为直线[23]。该构型下的距离历程RB(tm)可表示为
其中,|·|表示取模值。tm表示慢时间,其对应的频域变量为fa,Rt和Rr分别表示每个慢时间时刻发射机和接收机到点目标的斜距矢量。假设卫星发射线性调频信号,其调频率为γ,则经过去载频后的回波信号表达式可写为
其中,tb=RB(tm)/c。t表示快时间,其对应的频域变量为fr。c为光速,λ是发射信号的载波波长,对应的载频为fc。wr(·)和wa(·)分别为回波信号的包络窗函数和方位窗函数,第1个指数项表示线性调频项,第2个指数项表示去载频后的方位调制项。对回波信号进行距离向傅里叶变换,利用驻相原理[32]可求出对应的距离频谱如下
从式(1)可知,双基SAR距离历程具有双根号的形式,不能直接从傅里叶变换积分公式推出双基二维频谱的解析表达式。级数反演法可以求解任意双基SAR构型的二维频谱[33]。然而,传统的级数反演法无法求解双基SAR距离多普勒谱,而距离NCS的推导需要双基SAR距离多普勒谱的解析表达式。为了得到星弹双基前视SAR的距离多普勒谱,首先对式(1)中的双基SAR距离历程进行简化。假设成像场景距离幅宽为10 km,使用表1所给参数进行计算,在场景两端,接收机引起的距离徙动分别为RRCM1和RRCM2,两者之差为0.22 m,小于距离分辨单元的一半。因此,忽略接收机引起的距离徙动的空变,等效的双基地距离历程可以写为

表1 雷达系统仿真参数Tab.1 Simulation parameters of radar system
其中,vr,vt,av和a⊥分别表示vr,vt,av和a⊥的模值,Rt0为Rt(xp,yp;0) 的模值,Rr0为Rr(xp,yp;0)的模值。RE(tm)可进一步近似为
其中,R0=Rt0+Rr0。
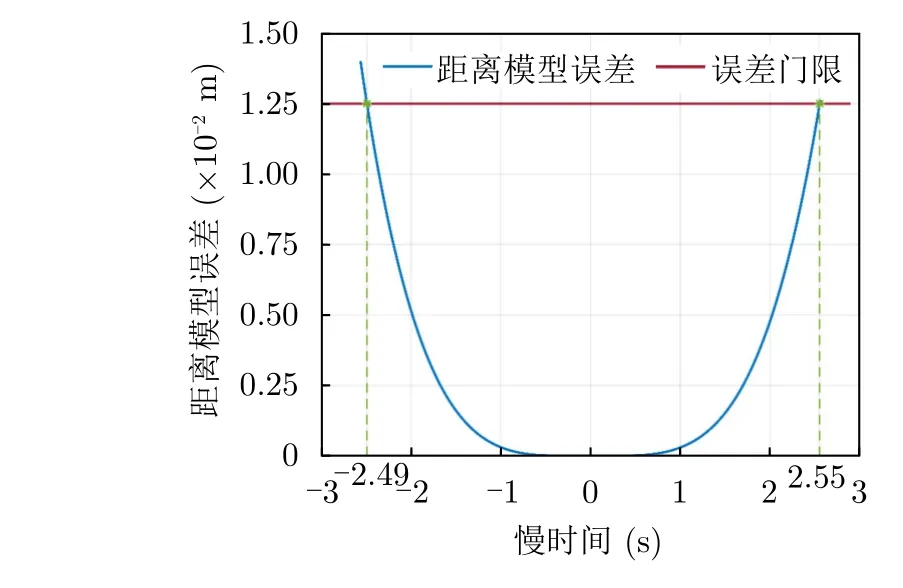
图2 所提距离模型误差Fig.2 The error of proposed range history model
在3.1节中,回波信号的采集预处理将对接收机的速度vr和沿速度方向加速度av进行补偿。补偿后的距离模型为,将其代入式(3)并进行方位傅里叶变换得信号的二维频谱S2,其表达式为
为得到回波信号的距离多普勒解析式,将S2关于fr的级数近似变换到距离时域,可得信号的距离多普勒相位为
3 距离预处理以及距离NCS处理
3.1 回波信号采集预处理
在星弹双基前视SAR中,导弹具有的较高前向速度和加速度导致目标回波在整个合成孔径时间内的距离跨度大,使得边缘目标的回波无法被完整记录。因此,本文提出基于自动波门调整(Automatic Gate Adjustment,AGA)的距离预处理,通过控制快时间采样的波门起始时刻来补偿接收机运动引起的相位变化。设tstart为波门的起始时刻,则tstart和tm的关系可表示为
其中,WR为成像斜距幅宽。
为直观地体现AGA在距离向处理的优势,以表1所示雷达系统参数进行仿真,结果如图3所示。图3(a)表明,在距离采样点数固定为8192点时,未经过距离预处理的成像斜距幅宽会随着导弹速度增加而显著减少。经过距离预处理后,成像斜距幅宽基本不受影响。图3(b)则从另一角度表明,距离预处理可以降低成像斜距幅宽对距离采样点数的要求,有利于提高处理效率。
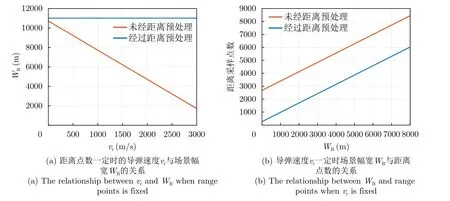
图3 距离预处理效果对比Fig.3 Comparison of range preprocessing effect
可知沿速度方向加速度av会使信号方位带宽减小,导致方位分辨率的恶化。而经过基于AGA的距离预处理之后,沿速度方向加速度av被补偿,信号的方位带宽得到恢复。恢复后的方位带宽可表示为
3.2 基于NCS的距离聚焦处理
距离预处理使得距离向与方位向的耦合得到缓解,但对于星弹双基前视SAR成像,剩余RCM和距离调频率的空变仍需处理。为解决这一问题,提出利用几何关系构造关于距离变量的变标函数来均衡剩余RCM和等效距离调频率,即距离NCS处理,然后经过一致滤波处理实现距离聚焦。NCS算法是通过在线性调频信号中引入变标函数,使信号的调频相位发生变化,可以调整变标函数的系数来均衡各距离单元的调频相位,如图4所示。
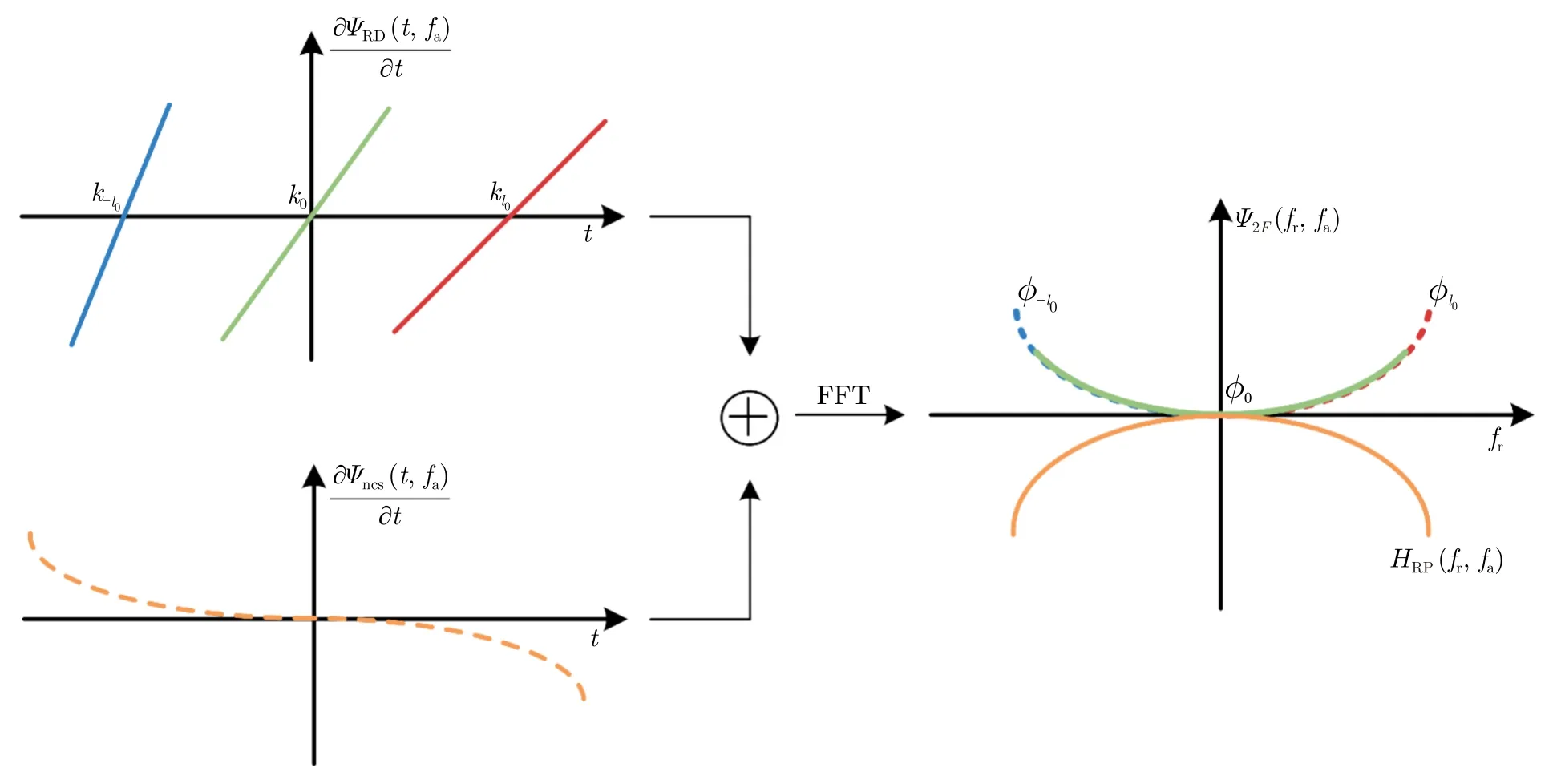
图4 NCS原理示意图Fig.4 Principle diagram of NCS
在式(7)所示信号的距离多普勒域中引入变标函数,其相位可表示为
其中,tC表示在合成孔径中心时刻场景中心点的距离时延。将在t=t0展开可得
其中,Δt0=t0-tC,ΨRD0是与快时间t无关的相位。观察式(12)可知,空变的Rt0是RCM和等效距离调频率的空变来源。
在星弹双基前视SAR中,成像场景幅宽远小于收发机到目标的距离,图1中的 ∠PMC和∠PNC趋于0,存在
其中,Rt,C和Rr,C分别为场景中心处的Rt0和Rr0。Δt0与Rt,C和Rr,C的关系可写为
联立式(13)和式(14)可得
其中,η=cos(φt0)/cos(φr0)。将式(15)代入式(12)并令 Δt0的系数为0可得
经过距离NCS处理,距离向的空变得到均衡,可以将信号变换到二维频域进行统一滤波。变换到二维频域的相位可表示为
Ψ2F0为fr的无关项。因此,距离处理滤波器可表示为
4 基于NCS的方位聚焦处理
4.1 方位调频率分析
由SAR成像原理可知,信号的方位向也表现为调频相位,设方位调频率为γa。在星弹双基前视SAR中,γa存在二维空变,对于距离维的空变可以距离分块处理,而对于γa的方位维空变则需要利用NCS来补偿。由双基SAR成像机理,导弹由于前视成像,其运动引入的方位调频率主要沿方位向分布,由卫星运动引起的方位调频率主要沿距离向分布。对于单一平台来说,方位调频率由速度和斜距以及两者的夹角确定[32],考虑到收发平台雷达信号的单程传播,发射机和接收机引起的方位调频率分别可表示为
其中,ta=xP/vt表示方位聚焦位置。
4.2 基于NCS的方位调频率均衡与方位聚焦
式(15)给出Rt0与距离变量的关系,因此γat也可以表示为距离变量的函数。由于距离处理中已实现距离方位的解耦,可以直接构造二维滤波器进行滤波处理,因此在方位处理中将γat视为非空变的。而对于需要考虑空变的γar,提出方位NCS处理,使用变标函数均衡γar。通过将γar中的空变来源Rr0并进行级数近似,方位信号方位调频率γa可写为
可知,γa中存在关于方位位置ta的二阶、四阶和六阶空变。因此,在信号的方位时域引入方位变标函数,可表示为
其中,ΨA0为tm的无关相位,ς1和ς2分别为tm的一次项系数和二次项系数,可分别写为
令ς2中关于方位聚焦位置ta的项为0可得
经过方位NCS处理后,方位空变的γar得到均衡,可利用式(15)可构造二维滤波器来对方位信号进行聚焦处理。方位聚焦滤波器可写为
经过方位傅里叶逆变换后可得到星弹双基前视SAR在二维时域的聚焦结果。
4.3 所提算法运算量分析
对于实时性要求高且算力有限的弹载平台,其搭载的成像算法复杂度不容过高。本文所提算法处理流程如图5所示,可见所提算法主要由快速傅里叶变换和相位滤波实现。设回波信号距离采样点数为Nr,方位采样点数为Na,则一次距离FFT和方位FFT的浮点操作数分别为 5NrNalog2Nr和 5NrNalog2Na,一次相位滤波相乘的浮点操作数为 6NrNa[34]。因此,所提算法总的浮点操作数为

图5 所提成像算法流程图Fig.5 Flowchart of the proposed imaging algorithm
5 仿真成像结果与分析
本节基于表1所给雷达系统参数,通过点仿真和场景仿真,对比了所提算法与传统NCS (Traditional NCS,TNCS)算法[26]和频域NCS (Frequency NCS,FNCS)算法[29]的成像结果,验证所提算法在聚焦星弹双基前视SAR回波信号的有效性。
5.1 点仿真成像结果
相比于机载和固定式发射站,星载发射源照射面积大,导弹可以接收到大场景的回波信号。因此,本节点仿真中设置了25个点目标,覆盖导弹前方16 km2的区域,如图6所示。
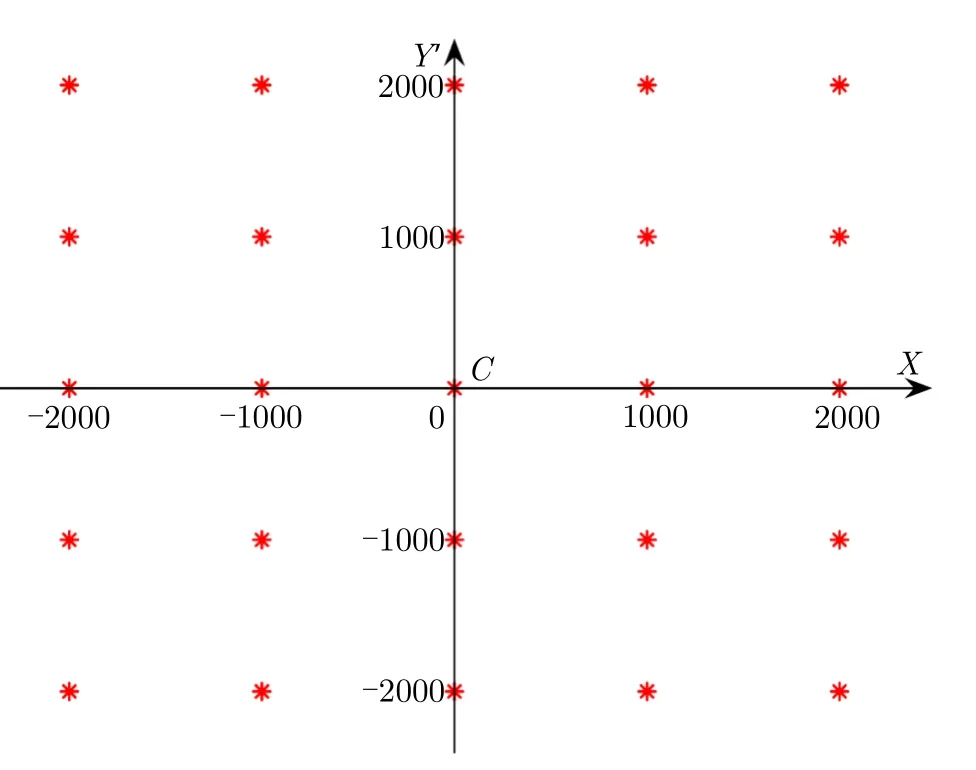
图6 仿真点目标分布Fig.6 Distribution of simulation point targets
若导弹接收的回波信号,不进行基于AGA的距离预处理,其二维频谱如图7(a)所示。图7(a)中,回波信号的二维频谱的距离向和方位向耦合严重,且由于导弹加速度的存在,回波信号的方位带宽减小,使方位向分辨率降低。图7(b)为利用AGA进行信号接收得到回波信号的二维频谱。可以看出,其距离向和方位向的耦合程度显著降低,且方位带宽得到恢复。使用所提算法对点目标回波信号进行处理,成像结果如图8所示。为对比所提算法与另外两种算法的成像性能,对图8中位于不同距离和方位聚焦位置的边缘点P1和P2进行分析。

图7 距离预处理前后信号的二维频谱对比Fig.7 Comparison of the signal in two-dimensional spectrum before and after range preprocessing

图8 所提算法的点仿真成像结果Fig.8 The point simulation imaging results of the proposed algorithm
图9—图14展现了不同算法在点目标P1和P2的成像结果。可以看出,TNCS算法[26]的成像结果仍存在一定的残余RCM,这是由于该算法使用参考点的成像参数进行RCM校正,未考虑RCM的空变。在方位向上,该方法也仅能处理方位调频率的方位线性空变。而在星弹双基前视SAR中,方位调频率是沿方位向二次、四次和六次变化的。因此,该方法的成像结果在距离向和方位向上存在一定程度的散焦。FNCS算法[29]使用一阶Keystone变换校正线性RCM,在方位频域上引入变标函数的同时,在方位时域均衡方位调频率和方位三次调频率的一阶和二阶空变。然而,在距离向上,该算法未考虑残余RCM的空变;在方位向上,该算法没有考虑方位向的高阶空变而影响了聚焦深度。并且,TNCS算法[26]和FNCS算法[29]均未考虑接收平台加速度的影响,导致成像结果的方位散焦。3种算法在点P1和P2的分辨率、峰值旁瓣比(Peak Side Lobe Ratio,PSLR)和积分旁瓣比(Integrated Side Lobe Ratio,ISLR)如表2所示,其中,在表1仿真参数下的理论方位分辨率和距离分辨率分别为1.8 m和1.0 m[35]。可见,所提算法的成像结果在成像指标的对比上是最优的,且成像分辨率达到了理论分辨率,证明所提算法能很好地聚焦边缘点目标的回波信号能量。
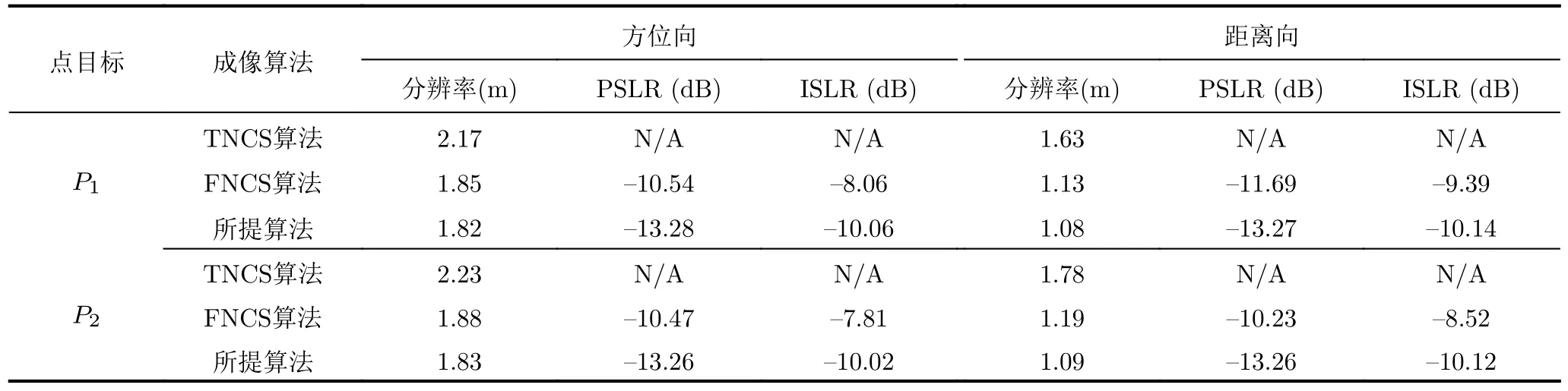
表2 点目标成像性能评估Tab.2 Point target imaging performance evaluation

图9 不同算法的P1点二维等高线图Fig.9 Two-dimensional contour maps of the point P1 using different algorithms

图10 不同算法的P1点方位剖面图Fig.10 Azimuth profile of the point P1 using different algorithms
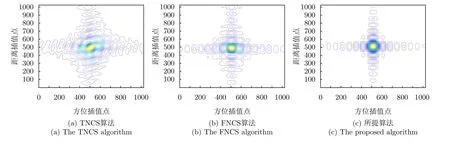
图12 不同算法的P2点二维等高线图Fig.12 Two-dimensional contour maps of the point P2 using different algorithms
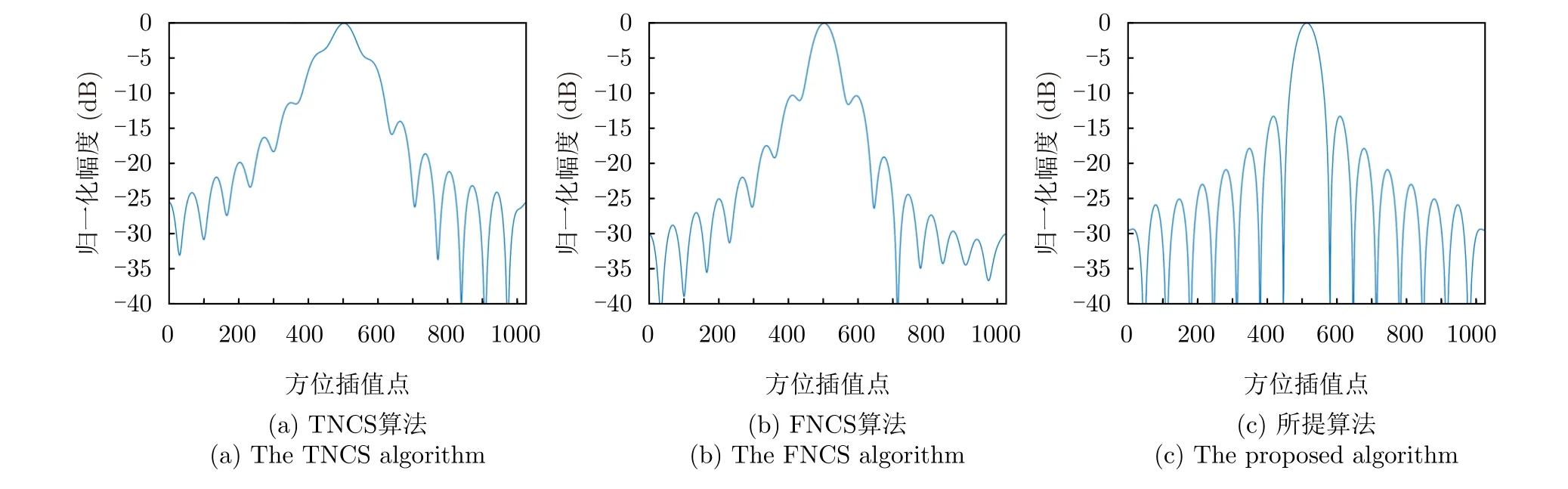
图13 不同算法的P2点方位剖面图Fig.13 Azimuth profile of the point P2 using different algorithms

图14 不同算法的P2点距离剖面图Fig.14 Range profile of the point P2 using different algorithms
5.2 场景仿真成像结果
为进一步证明所提算法在复杂成像场景下的有效性,使用基准SAR图像模拟成像场景。在场景仿真中,基准SAR图像的每个像素都被视为场景目标的一个散射点。成像场景在X轴和Y轴的长度分别为7.7 km和6.6 km,成像区域面积为50.8 km2。图15所示为本文所提算法处理后的场景目标成像结果。图16为图15中红框所选区域放大图,对比了不同算法在远离场景中心的边缘区域的成像结果。可以看出,通过所提算法的处理,基准SAR图像的散射特性得到了很好的展现,最接近BP算法的成像结果,而其他两种算法分别存在不同程度的散焦现象。图17为图15中所选红色圆内孤立散射点Ps,通过不同成像算法处理得到的方位向剖面图和距离向剖面图。由5.1节分析可知,TNCS算法[26]和FNCS算法[29]分别忽略了RCM和残余RCM的空变,因此距离剖面图中存在主瓣展宽和旁瓣升高。在星弹双基前视SAR中,方位向空变严重,TNCS算法[26]只考虑方位调频率沿方位向线性变化,无法满足聚焦需求。FNCS算法[29]虽然一定程度上均衡了方位调频率沿方位向二次变化,但忽略了方位调频率的高次空变。并且这两种NCS算法都没有考虑接收平台加速度对方位调频率的影响,导致这两种算法成像结果的方位聚焦深度不如所提算法。在与BP算法的对比上,所提算法的成像结果无论是聚焦效果和剖面图都与BP算法的成像结果极为接近。因此,实验结果验证所提算法能够处理复杂场景下的星弹双基前视SAR数据,并良好地展现成像区域的散射特性。

图15 所提算法的场景仿真成像结果Fig.15 Scene simulation imaging results of the proposed algorithm

图17 不同算法的场景仿真孤立点分析Fig.17 Isolated point analysis in scene simulation of different algorithms
6 结语
本文提出了一种适用于星弹双基前视SAR的成像算法,通过距离预处理和联合距离方位的二维NCS算法,得到全局聚焦良好的雷达散射图像。所提算法相较于其他双基前视SAR成像算法的区别在于给出了距离预处理和距离NCS处理方法,在距离预处理中补偿导弹加速度引起的方位频谱压缩并减小距离采样点数,利用距离NCS处理空变的RCM和距离调频率。其次,所提算法方位NCS处理中考虑了方位调频率的四阶和六阶空变,在较大场景的成像中具有更优的方位聚焦效果。仿真结果表明,所提算法能有效处理星弹双基前视SAR数据。然而,所提算法对几何构型存在一定限制,下一步工作是改进所提算法用于复杂构型下的星弹双基前视SAR成像。
利益冲突所有作者均声明不存在利益冲突
Conflict of Interests The authors declare that there is no conflict of interests
猜你喜欢
幼儿园(2021年12期)2021-11-06
小学生导刊(2018年34期)2018-12-18
艺术评鉴(2016年17期)2016-12-19
中学教学参考·理科版(2016年9期)2016-12-15
系统工程与电子技术(2016年2期)2016-04-16
中国修辞(2016年0期)2016-03-20
幼儿100(2016年28期)2016-02-28
山东青年(2016年3期)2016-02-28
火控雷达技术(2016年2期)2016-02-06
母子健康(2015年1期)2015-02-28