基于MEMS惯性传感器变形监测系统研究
2024-01-02 10:48徐云乾袁明道包腾飞潘展钊李培聪
压电与声光 2023年6期
徐云乾,袁明道,包腾飞,潘展钊,李培聪,李 昊
(1.河海大学 水利水电学院,江苏 南京 210098;2. 广东省水利水电科学研究院,广东 广州 510635;3. 阳江核电有限公司,广东 阳江 529941)
0 引言
水库大坝是水防御、水资源优化配置、能源供应和调节、农业灌溉、水生态水环境维持等必不可少的重要基础设施,大坝失事对于公共安全影响巨大。大坝表面变形监测是坝体安全监测重要的项目之一。目前对于坝体变形监测,大多采用水管式沉降仪、渗压计、静力水准仪、振弦式传感器及光纤测斜仪等进行监测[1-4],但是整体系统安装部署复杂[ 5-7]。近年来,随着微机械芯片制造技术的快速发展,微机电系统(MEMS)惯性传感器被广泛应用于电力、桥梁、边坡等基础设施安全健康监测中[8]。目前处于实现自动化监测向高精度发展阶段,监测精度低于传统人工测量精度,且还有诸多工程应用问题尚未解决[9-10],无法满足野外无人环境下快速部署、长时间、高频次自动化监测及大范围部署的应用需求。
本文针对以上实际应用需求,基于无需外源信息的MEMS惯性传感器,通过鲁棒简洁的结构设计、开源节流的能量供应设计、无限拓展的通信覆盖网络设计,建立起野外无人值守环境下的自主高精度变形监测系统。
1 系统概述
如图1所示,变形监测系统核心组件有云端、网关和终端。终端从MEMS传感器中获取原始数据,经过基于卡尔曼滤波的优化算法后解算终端姿态角,将新数据进行通信链路格式化处理,经历一系列的重封装、压缩、加密等数据处理操作,数据被送入通信链路,经最近的网关上报至云端。
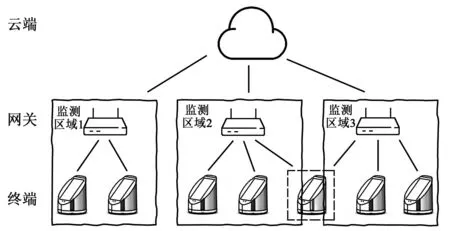
图1 系统拓扑图
终端按功能划分有主控单元、传感单元、人机交互单元、存储单元、供能单元及通信单元。主控单元承担终端工作逻辑实现、信息交互、原始数据解算等,是整个终端的核心控制所在。传感单元包含MEMS加速度计、陀螺仪和磁力计3种传感器,为整个系统提供原始的物理数据,是整个终端的基础。人机交互单元指示终端的工作状态,并响应对终端的操作,为观察和控制终端提供窗口。存储单元主要用于缓存各种类型数据。供能单元以低功耗的调度策略为整个终端供电,并在有效照射时间中利用太阳能进行补能。通信单元对接网关,建立通信链路,将处理好的数据发送到网关。
2 网络架构
2.1 星形组网拓扑
与常规坝体的无线传感器部署不同[11-12],变形监测系统常部署在通信条件受限的无人或近无人区域,这对通信链路提出了较高的要求。本文基于LoRa调制技术作为物理层,以星形拓扑自组网的形式,建立了整个变形监测系统网络链路。每个监测区域以网关进行标定(见图1),每个网关所覆盖的区域被划定为一个监测区域,每个监测区域内有多个监测终端。本系统中存在终端、网关和云端。
终端包含一个通信单元,该通信单元在物理上同时存在于网关中。其物理实现均基于LoRa无线通信技术,具有功耗低,距离远及组网方便的特点,已广泛应用于物联网通信中,这里的终端和网关间的通信是基于LoRa无线通信技术实现。终端中主控单元将数据打好后,通过LoRa通信网络发送给网关。
网关承上启下,对下接收覆盖范围内的所有终端上行数据,下发各类查询和控制指令。对上将所有的终端数据进行解包,再重封装转发到云端,接收并分解云端的查询和控制指令。因此,网关具有数据量大,直接对接云端服务器,长时间在线等特点,本文采用蜂窝无线网络和云端通信。
2.2 重覆盖节点
监测区域的部署和划分与业务的关系较大,根据监测需要和监测范围的覆盖大小,每个监测点位的网络拓扑除需考虑自身体系外,还会涉及物理位置相邻的系统。如图1所示,监测点位2、3的中间终端(虚线框内),该终端同时被两个监测区域覆盖。该终端上行的数据会同时被监测点位2、3的网关接收,这两个网关同时会将该终端上行的数据上报云端,云端系统接收到2条同样时间戳的终端数据时,会随机删除1条,只保存1份。以此实现了终端的任意自组网,这不仅有利于现场施工安装,去掉了配网、联网、强绑定等过程,更可有效地解决某个监测区域终端过多,超出网关覆盖范围时,同一个监测区域部署多台网关的问题。
网络架构的实际部署情况需要结合应用现场情况,因地制宜的进行设计部署。
3 工程实现
3.1 传感单元
MEMS惯性传感器是一类基于MEMS技术制造的、能将惯性相关物理量(如加速度、旋转等)转变为另一类物理量(主要是便于测量的电学量)的器件。本文采用1个高精度MEMS加速度传感器和1个MEMS陀螺仪传感器(见图2),其与主控单元间使用I2C通信协议进行数据通信,I2C协议是一种双向同步串行总线协议,被广泛应用于数据传输速度要求不高、多设备同时挂载的场景中。

图2 传感器电路图
由于监测环境一般处于静止状态,高精度MEMS加速度传感器可以有效地测量出重力在各个轴向的分量,以此可快速计算出静止状态下终端的倾斜角度。但如果终端发生倾斜或突然运动,在与运动方向不相垂直的轴向上会叠加运动加速度,这将导致角度解算出错。因此,陀螺仪通过测量角速度后短时积分可以进行补偿。
3.2 供能调度
变形监测系统要求长时间无人自主工作,现场维护的成本较大,因此,能量消耗、调度策略和有效补能非常重要。
3.2.1 能量消耗
按休眠或低功耗实现形式,功耗可将各单元分为:
1) 电源完全断开类(如人机交互单元和通信单元等)。其在休眠过程中可以完全断开电源,等待主控单元根据调度策略重新上电即可。
2) 切换到低功耗工作模式(如传感单元和主控单元)。正常情况下,周期数据上报后,主控单元逐个操作其他单元进入低功耗模式,最后自己也进入休眠模式。此时,传感单元一直持续监测,在终端感受到突然发生的加速度变化时,触发振动唤醒中断,唤醒主控单元,进入工作状态。
终端整个运行周期的运行状态可分为就绪、采集、通信和休眠。就绪状态是指设备各项外设自检通过,所有单元准备就绪的状态,该状态下任何的外界刺激都会进行响应。采集状态是指主控单元对MEMS惯性传感器进行数据采集、提取、解算和通信前打包等,包括数据从传感器物理量到待通信之间的所有状态,在该状态下某些外界刺激不会有响应,如云端下发指令。通信状态是指主控单元发送数据到网关或网关下发指令到终端的全过程,该状态下,从云端看设备处于即时响应状态,从云端到终端的全通信链路完全接通,下发任何指令都会实时响应。休眠状态是指终端除处于低功耗模式的主控单元和监测状态变化的传感单元外,所有其他单元和外设均处于休眠或断电状态,此状态下仅响应主控单元的定时唤醒机制或传感的振动唤醒,功耗可达微安级。
3.2.2 调度策略
调度策略方面,上电后,终端立即开始自检并对所有单元初始化,完成后终端处于就绪状态,此时有3个触发源可切换终端的状态至采集状态:
1) 采集周期到,终端在正常工作状态会固定周期进行数据采集。
2) 云端下发了数据请求指令后,主控单元进行解析,完成后进行数据采集。
3) 振动唤醒后,完成设备的就绪立即开始采集。
如果在就绪状态下保持一定的时间无任何操作,设备将进入休眠模式。休眠模式下,功耗极低,仅在采集周期到和振动唤醒中断触发情况下唤醒设备,设备唤醒后马上开始各外设的初始工作,立即进入采集状态,此过程无法被打断,享有较高的优先级。
3.2.3 有效补能
有效补能针对变形监测系统主要应用于野外无人露天场景的特点,通过太阳能进行有效充电,考虑目前应用场景均处于北半球,故采用45°倾斜向南的方式以最大程度延长充电时间,具体细节将结合结构设计进行讲解。
在硬件实现方面,为保证最大补能效率和最小系统干扰,该部分完全采用硬件电路实现,不经过任何的软件控制。采用专业太阳能板锂电池充电管理芯片,通过其充电电流自适应模块,可以根据输入电压源的电流输出能力自动调整充电电流,以便在任何微小的光照条件下均能进行有效补能。
3.3 通信单元
在传输过程中,由于现场各种复杂性,数据可能出现通信乱码、数据丢失、数据帧间串码等情况。为了提高通信稳定性,本文从信道活动检测和通信协议两个方面进行了设计。
3.3.1 信道活动检测
信道活动检测(CAD)是指在通信前检测无线信道上的前导码,信道空闲时再进行通信,若信道繁忙,则等待随机时间后再进行通信。信道检测可有效地避免一个网关对接多个终端时通信碰撞导致的丢包、串包问题。
可从芯片的数据手册中得到DIO引脚在LoRa模式下的映射图,如表1所示。即如果将DIO3寄存器配置为00,DIO1寄存器配置为10,DIO0配置为00,可实现通过不同的中断来完成信道活动检测的效果,即DIO3引脚中断表示CAD检测完毕,DIO1引脚中断表示CAD活动检测被检测到,DIO0引脚中断表示通信数据被接收。
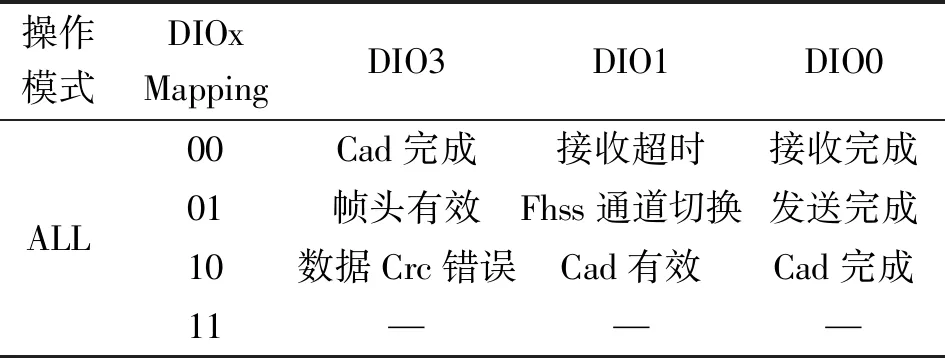
表1 DIO引脚映射表
3.3.2 通信协议
通信协议通过校验、帧头、密钥等手段可有效防止错码、乱码和恶意破解等问题。表2为通信协议各字段定义。表2中,帧头是采用双字节帧头的方式作为数据的起点。帧长代表整个数据帧的完整字节长度。帧序为每个帧序号,用于双方确认通信是否连续。发送者编号和接收者编号标识数据流向,以更好的优化网络拓扑结构。时间戳标识数据时间,一方面是标注数据采样时间便于应用分析,另一方面是重复覆盖节点的数据去重。数据段分别是绕x、y、z3轴(具体定义参见结构设计小结)角度和x、y、z3轴重力加速度数据。校验字段采用CRC16校验对前述所有数据进行计算,以便接收方接收到数据后进行数据验算。由表可知,当主控单元从传感单元获取到数据后,将按照表格定义进行打包,随后通过通信单元发出。

表2 通信协议各字段定义
4 结构设计
针对变形监测系统主要应用于野外、露天等环境中,可能出现雨雪、冰雹、雾霾、高温、暴晒、严寒、雷击等恶劣天气,结构设计必须考虑防雨、防晒、防尘、防腐蚀、防虫蛇鼠咬等情况。本文提出的野外环境适应性加固技术(见图3)如下:

图3 变形监测系统结构设计图及实际安装图
1) 变形监测系统设备整体采用增强型ABS工程塑料,该材料具有强度高,韧性好,易于加工成型的特点,可提高在阳光暴晒后的抗雨、抗冰雹能力。
2) 终端整体呈圆柱切削形成45°倾斜椭圆交线状。斜面上布置补能太阳能板1块,正下方设置人机交互区。安装时,将太阳能板面朝正南方向,以最大化阳光照射时间。
3) 以右手笛卡尔坐标系建立终端坐标体系,拇指指向x轴正向,食指指向y轴正向,中指指向z轴正向。
4) 整个外壳完全密封,不留任何缝隙空间,防水等级达到IP68。
5) 在应用前加速生命周期,保证终端在面对温度、水泡、振动极端变化时,稳定可靠。
5 应用及结果
2022年,在监测现场进行应用,监测区域1、2相距2.5 km。图4为监测区域1的现场终端和网关部署图。图5为监测区域2的现场部署图。该项目为水库坝体变形监测,在背水坡多点分布安装监测终端,多点同时监测坡体变形。由于两监测区域间距较近,LoRa通信距离互相覆盖,一方面形成冗余通信覆盖,提高通信可靠性,另一方面将触发重覆盖节点机制。

图4 监测区域1应用现场部署图
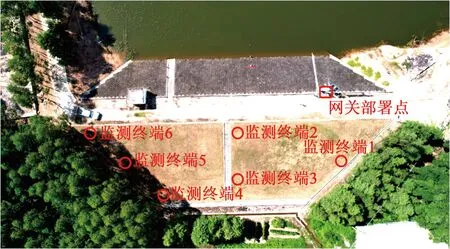
图5 监测区域2应用现场部署图
近半年的试点应用过程中,两监测区域终端上线率达100%。数据稳定性方面,按照每10 min上报周期,持续24 h不间断上报,理论上报数据为338 688条,实际上报数据338 518条,数据丢包率约0.05%。
以监测区域1的监测终端5为例,对实验结果进行数据分析,该数据取至2023年1月6日8点至1月10日3点,共计数据547条,图6 为x、y、z轴角度随时间变化曲线。图7为x、y、z轴加速度随时间变化曲线。由图6可看出,在静态场景下,解算出来的角度信息,稳定、连续、波动小,符合预期。由图7可看出,z轴保持在重力加速度附近,其余两轴由于安装原因持续保持一定分量。

图6 3轴角度曲线图

图7 3轴加速度曲线图
6 结束语
本文设计了一个基于MEMS惯性传感器的变形监测系统,其集传感、采集、处理、通信、上云于一体。首先,通过星形组网的网络架构,结合应用场景设计了重复覆盖节点的网络拓扑,形成了稳定可靠、不丢包、防干扰的数据链路。其次,针对恶劣条件、长时间无人值守等应用场景进行了硬件实现,分别对传感单元、供能调度、通信单元进行了设计,并结合应用场景的工作条件、天气情况等采用了外壳增强手段。最后,在实际的坝体变形监测现场进行了试点应用,有效地验证了链路稳定性、设备可靠性,并陆续在广东省200余个水库进行了试点应用。今后,在获取大量试点监测数据的基础上,我们将继续深入研究多点分布式部署终端的数据综合分析和大坝安全监测健康度反演。
猜你喜欢
现代装饰(2020年8期)2020-08-24
现代装饰(2020年5期)2020-05-30
铁道通信信号(2019年9期)2019-11-25
丝路艺术(2017年5期)2017-04-17
初中生(2017年3期)2017-02-21
小学生优秀作文(趣味阅读)(2017年3期)2017-02-11
电子制作(2016年15期)2017-01-15
移动通信(2015年18期)2015-08-24
太阳能(2015年7期)2015-04-12
组合机床与自动化加工技术(2014年9期)2014-03-01