一种挂轨导向机构的设计★
2024-01-04 12:21吴旭平邓义强马浩浩
机械管理开发 2023年11期
吴旭平, 邓义强, 马浩浩
(天水师范学院, 甘肃 天水 741001)
0 引言
在机器人自动巡检技术中,为便于机器人在轨道上的行走,需要在挂轨机器人上设置导向机构,用以保证挂轨机器人在轨道上的稳定行走。现场施工过程中,用于限制挂轨机器人行走路线的导向机构需要根据现场的需要改变方向,即导向机构会产生弯曲过渡部位,其中导向机构中的过渡弯曲部位需要进行定制,不同场景需要不同角度的过渡弯曲部位,通用性不足,增加制造成本[1]。因此挂轨导向机构有如下的效果:使导向机构中的过渡弯曲部位可随现场需要调整,提高通用性。
1 技术方案
挂轨导向机构,包括用于限制挂轨机器人行走轨迹的导轨,导轨一端设有多个串联布置的过渡板,靠近导轨的一个过渡板通过铰链与导轨铰动连接,相邻两个过渡板通过铰链铰动连接,铰链安装在过渡板一侧面中部位置,导轨上表面远离过渡板的一侧和距离导轨最远的一个过渡板上表面均固定连接有悬吊件,过渡板上表面中部位置固定有魔术贴毛面条,魔术贴毛面条沿着导轨的宽度方向布置,魔术贴毛面条上粘连有魔术贴勾面条,魔术贴勾面条固定在条形板下表面。
悬吊件包括连接板,导轨上表面远离过渡板的一侧和距离导轨最远的一个过渡板上表面均固定连接有连接板,连接板为L 型结构,连接板竖直部开设有水平布置的用于穿插螺栓的第一圆孔,连接板水平部开设有竖向布置的用于穿插螺栓的第二圆孔[2]。
导轨上表面开设有两个阶梯槽,两个阶梯槽对称设置在连接板两侧,阶梯槽沿着导轨的长度方向布置,阶梯槽内安插有可拆卸的用于接触挂轨机器人行走轮的垫条。
垫条下表面均匀固定连接有多个竖向布置的插接柱,阶梯槽内底部均匀开设有多个与插接柱相配合的插接孔,插接柱安插在插接孔内。
插接柱远离垫条的一端固定连接有橡胶头,橡胶头与插接孔过盈配合。
过渡板上表面中部位置开设有凹槽,魔术贴毛面条通过胶水粘贴在凹槽内。
过渡板安装铰链的位置处开设有第一条形槽,导轨安装铰链的位置处开设有第二条形槽。
2 具体实施方式
参考图1、图2 和图3,本挂轨导向机构提供一种技术方案:一种挂轨导向机构,包括用于限制挂轨机器人行走轨迹的导轨1,导轨1 一端设有多个串联布置的过渡板6,靠近导轨1 的一个过渡板6 通过铰链7 与导轨1 铰动连接,相邻两个过渡板6 通过铰链7铰动连接,铰链7 安装在过渡板6 一侧面中部位置,过渡板6 安装铰链7 的位置处开设有第一条形槽,导轨1 安装铰链7 的位置处开设有第二条形槽,第一条形槽和第二条形槽为铰链7 的叶片部提供安装空间,使铰链7 的叶片部与导轨1 侧面、过渡板6 侧面相平齐。
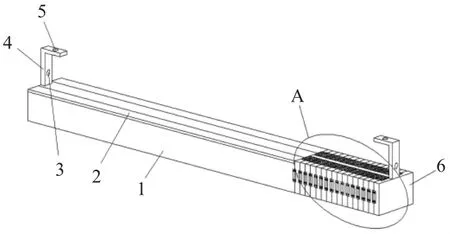
图1 挂轨导向机构

图2 挂轨导向机构局部放大图
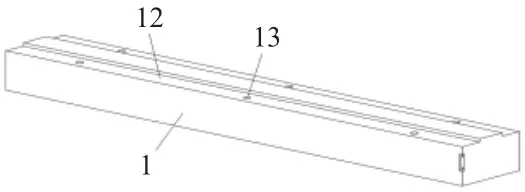
图3 阶梯槽和插接孔
如图1 所示,导轨1 上表面远离过渡板6 的一侧和距离导轨1 最远的一个过渡板6 上表面均固定连接有连接板4,连接板4 为L 型结构,连接板4 竖直部开设有水平布置的用于穿插螺栓的第一圆孔3,连接板4 水平部开设有竖向布置的用于穿插螺栓的第二圆孔5,使螺栓穿过第二圆孔5 安装在所需位置处,完成连接板4 位置的固定,即导轨1 处于悬置状态,利用螺栓使一个导轨1 上的连接板4 与另一个导轨1 中的过渡板6 上的连接板4 相连接,完成相邻两个导轨1 之间的连接,依次类推,完成多个导轨1 之间的连接,便于根据现场巡检长度增减导轨1的数量。
参考图1、图2、图4 和图5,过渡板6 上表面中部位置固定有魔术贴毛面条9,魔术贴毛面条9 沿着导轨1 的宽度方向布置,过渡板6 上表面中部位置开设有凹槽11,魔术贴毛面条9 通过胶水粘贴在凹槽11 内,凹槽11 为魔术贴毛面条9 提供安装空间,魔术贴毛面条9 上粘连有魔术贴勾面条10,魔术贴勾面条10 固定在条形板8 下表面,使相邻两个过渡板6 之间产生一定的夹角,多个过渡板6 之间形成一定的弯曲状,实现使相邻两个导轨1 之间形成角度可变的过渡弯曲部位,便于根据现场的需要调整过渡弯曲部位的角度,扩大适用范围,无须进行单独定制,降低生产成本,多个过渡板6 形成的过渡弯曲部位调整完毕后,将条形板8 置于多个过渡板6 形成的过渡弯曲部位上侧,并使魔术贴勾面条10 与多个过渡板6 上的魔术贴勾面条10 均粘连,在条形板8 的支撑下,限制相邻两个过渡板6 之间的角度。
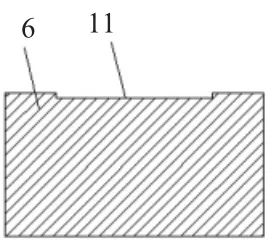
图4 过渡板和凹槽
图5 魔术贴勾面条和条形板
参考图1、图3 和图6,导轨1 上表面开设有两个阶梯槽12,两个阶梯槽12 对称设置在连接板4 两侧,阶梯槽12 沿着导轨1 的长度方向布置,阶梯槽12 内安插有可拆卸的用于接触挂轨机器人行走轮的垫条2,垫条2 下表面均匀固定连接有多个竖向布置的插接柱15,阶梯槽12 内底部均匀开设有多个与插接柱15 相配合的插接孔13,插接柱15 远离垫条2的一端固定连接有橡胶头14,橡胶头14 与插接孔13过盈配合,插接柱15 安插在插接孔13 内后,橡胶头14 与插接孔13 内壁相贴合,提高插接柱15 安插的稳定性,即提高垫条2 与导轨1 插接的稳定性,使挂轨机器人上的行走轮搭接在垫条2 上,当垫条2 在与行车轮反复接触下磨损变薄时,取下阶梯槽12 内的垫条2 并更换即可。

图6 过渡板
3 挂轨导向机构的效果分析
1)利用螺栓使一个导轨上的连接板与另一个导轨中的过渡板上的连接板相连接,完成相邻两个导轨之间的连接,依次类推,完成多个导轨之间的连接,便于根据现场巡检长度增减导轨的数量。
2)当相邻两个导轨之间需要产生过渡弯曲部位时,使相邻两个过渡板之间产生一定的夹角,进而多个过渡板之间形成一定的弯曲状,使相邻两个导轨之间形成角度可变的过渡弯曲部位,即便于根据现场的需要调整过渡弯曲部位的角度,扩大适用范围,无须进行单独定制,降低生产成本。
3)多个过渡板形成的过渡弯曲部位调整完毕后,将条形板置于多个过渡板形成的过渡弯曲部位上侧,并使魔术贴勾面条与多个过渡板上的魔术贴勾面条均粘连,在条形板的支撑下,限制相邻两个过渡板之间的角度[3]。
4 结语
本文设计的挂轨导向机构有如下的效果:使导向机构中的过渡弯曲部位可随现场需要调整,提高通用性。虽然我国机器人的研制时间相对较晚,但机器人在制造行业、国防军事以及公共安全领域等均得到广泛应用[4]。为此,我国有必要加强机器技术研发.从而提升我国高新技术产业发展水平,让民众的生活更加便利。
猜你喜欢
英语文摘(2020年1期)2020-08-13
民用飞机设计与研究(2019年2期)2019-08-05
北京汽车(2019年6期)2019-02-12
汽车电器(2018年10期)2018-11-01
小朋友·快乐手工(2017年12期)2018-01-15
小学生导刊(2016年5期)2016-12-01
幸福(2016年9期)2016-12-01
发明与创新(2016年6期)2016-08-21
少儿科学周刊·儿童版(2015年10期)2015-11-07
CHIP新电脑(2014年5期)2014-05-14