
智能安保巡检机器人设计与应用
2024-01-05 08:04索旭东李康华李冀川
自动化与仪表 2023年12期
索旭东,李康华,康 晓,李冀川
(智能移动机器人(中山)研究院,中山 528400)
随着人工智能、自动识别、路径规划以及机器人行业的迅速发展,智能安保巡检机器人被列为一项重要的发展计划。目前仓库智能巡检面临较多问题,主要如下:一是仓库物品摆放较为杂乱,机器人路径规划存在一定难度;二是仓库工作条件艰苦;三是仓库人手不足,部分工作不能及时开展。
本文设计实现一套无人值守仓库的智能安保巡检机器人,智能安保巡检机器人可根据操作人员在管理平台的任务操作或预先设定任务,仓库现场工作人员可通过机器人后台管理系统收到的实时图像与数据等信息,实现仓库无人巡视工作。
1 智能安保巡检机器人需求背景
虽然仓库装设了监控系统,但仍存在漏检或监控死角,另外随着人们安全意识的提升与用人成本的增加情况,使得往常以人员巡检的安保方式无法满足仓库巡检的需求。
智能安保巡检机器人能帮助巡检人员摆脱原始纸笔记录方式,在巡检过程中按具体的巡检规范和巡检标准进行巡检,减少人为因素带来的漏检问题,使巡检工作实现高效地无纸化采集数据,实现信息化管理。
2 智能安保巡检机器人设计
2.1 动态自主规划路径设计
智能安保巡检机器人实现了自主定位导航,其中包括定位、建图与路径规划[1-2]。利用SLAM 作为机器人定位导航的核心技术,但SLAM 只是完成定位与地图创建这两件事情,并不完全等同于自主定位导航。SLAM 的核心分为3 个步骤,第1 步为预处理,通过激光雷达设备检测机器人某一时刻的环境信息,并且获取该时刻机器人所处的环境信息形成点云图。点云图只是反映机器人所在环境中的一个部分,而SLAM 第1 步预处理就是对激光雷达的原始数据进行优化,剔除一些有问题的数据,从而保证路径规划的正确性;第2 步就是匹配,也就是把当前这一个局部环境的点云数据在已经建立的地图上寻找对应的位置,匹配的精确度直接决定机器人定位的精度;第3 步就是地图融合,通过激光雷达的新数据拼凑到原始地图当中,完成最终的地图更新。在机器人完成SLAM 定位后,机器人要实现自主路径规划必须进行目标点导航的功能,类似规划一条从A 点至B 点的一个路径,然后让机器人根据这条路径移动。要实现这个过程,路径规划包含两个方面,一是全局规划,在初始地图上预先规划一条路线,也要有机器人的初始位置,这是由机器人进行SLAM 后提供的;二是当机器人根据路径规划好的路线从A 点到B 点的过程中,可能会出现路径中会出现障碍物甚至是实际地图已经改变了,初始规划好的路径已经不能让机器人正确的从A点到B 点,这就需要调整原先的路径,当然有时候机器人并不是重新计算一遍全局路径,实际情况可能机器人只需绕一个弯即可成功的根据路径规划到达B点。此时就需要局部规划,局部规划并不针对机器人实际终点位置,只针对机器人周围路径是否可行,根据雷达数据及其他传感器数据融合后,对路径进行自主的调整,实现动态的路径规划。
2.2 实际场景应用融合设计
目前市场上使用场景单一,只是针对某类场景做应用。智能安保巡检机器人根据各种实际安保应用场景进行各方面功能的融合,机器人不仅满足了安保方面的需求,通过各种传感器融合及实时摄像头监控对机器人所处环境进行实时的监控,同时针对实际仓储应用场景融合了物资管理系统,针对物资管理系统融合扫码器应用,可通过扫码器对仓储内物资进行扫码出入库;对于查库签到系统,机器人在操控端融合了人脸识别功能及针对实际应用需要进行打开签到功能。智能安保巡检机器人通过对应用场景的融合,取代了原先单纯的巡检功能的机器人,实现机器人的生态化应用[3]。机器人应用场景示意图如图1 所示。

图1 机器人应用场景示意图Fig.1 Schematic diagram of robot application scenarios
2.3 云端融合设计
智能安保巡检机器人搭载4G 模块,关于机器人所有的信息包括状态信息、传感器数据信息、日志信息以及各种远程控制功能,可以通过4G 模块连接云端服务器后通过后台系统可直接显示所有机器人的部署情况,通过机器人与服务器的融合,将后台管理系统集群的部署在监控室中,方便对大型园区、厂区实现真正的统一管控。云端融合示意图如图2 所示。
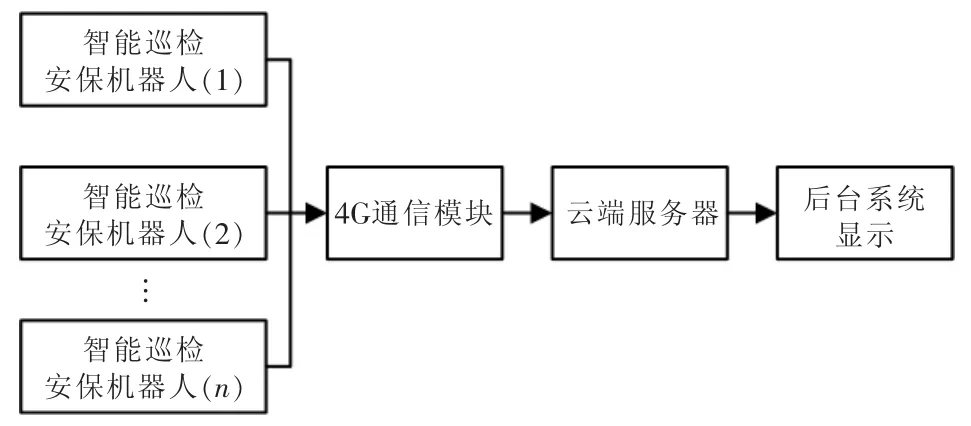
图2 云端融合示意图Fig.2 Schematic diagram of cloud integration
3 智能安保巡检机器库房巡检应用
3.1 智能安保巡检机器人主要参数
本文设计的智能安保巡检机器人是作业库房巡检的机器人,集成了激光雷达定位功能、红外火焰检测技术、机器视觉技术、环境检测功能、数据分析与决策支持系统等核心技术,可有效替代巡检人员开展各类巡检工作。智能安保巡检机器人的详细功能介绍如表1 所示,其主要技术指标如表2 所示。机器人外壳前后端安装软性塑料,防止机器人发送故障时误撞人和设备。外壳防护性能应符合国标GB-4208 中IP54 的要求。

表1 智能安保巡检机器人功能Tab.1 Function of intelligent security inspection robot

表2 智能安保巡检机器人技术指标Tab.2 Technical indicators of intelligent security inspection robot
3.2 智能安保巡检机器库房巡检系统
智能安保巡检机器人主要是由全向移动系统、智能安保巡检系统、环境检测系统以及人机交互系统四大系统组成,如图3 所示。
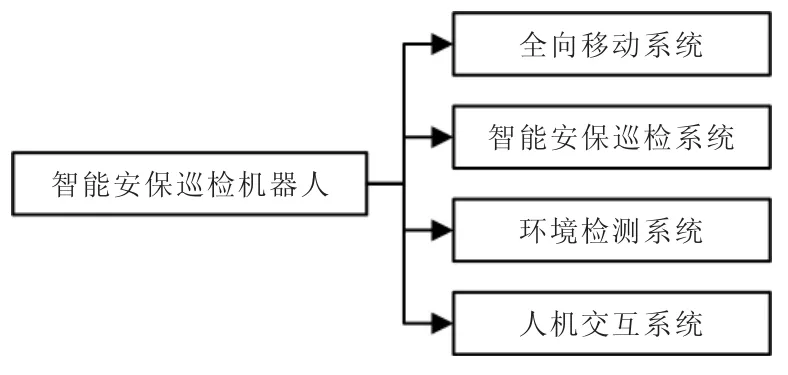
图3 智能安保巡检机器人系统构成Fig.3 Intelligent security inspection robot system composition
3.2.1 全向移动系统
机器人的全向移动系统包括主控计算机系统、运动控制软件、差速轮组、机器人结构框架及外壳、锂电池及充电器组成。
移动平台主体框架采用KELO 底盘的高可靠性移动平台的构型设计,具有高负载能力以及底盘稳定性控制能力,使用四轮底盘结构使轮子受负载小、稳定性高。差速轮组位于底盘下方,是机器人移动的关键,且每个轮子能独立驱动,并可向任意方向移动,相较于传统机器人解决了机器人移动性不足的问题。使用差速轮组可便于机器人在不同转向、不同室内道路状况下,车轮在不同转速和扭力不平衡的情况,起分速差动作用,提高了机器人移动过程中稳定性。
3.2.2 智能安保巡检系统
机器人的巡逻功能操控模式分为近程操控、远程操控、自主巡检3 种模式。3 种操控模式共4 种功能:进程遥控、远程遥控、语音引导和自主巡检。进程操控可通过进程遥控跟语音引导的方式控制,进程遥控可在近端控制机器人出入库,机器人移位以及机器人自主故障时,进行控制及调试;远程模式主要用于监控中心人工遥控巡检、远程遥控移位、下发自主巡检任务和机器人自主故障时,进行远程手动控制。机器人上搭载的云台摄像头,通过远程无线传输实时将画面采集并回传到远程监控室,远程监控软件能设置一系列摄像头参数,包括焦距、云台移动控制等等。同时可实现录像存储、历史回放。
在自主巡检模式下,通过激光雷达进行建图和避障,机器人可根据设置好的路线进行巡检并实时定位。在巡检过程中若电量不足机器人将自主返回充电点进行自主接触式充电,待充满后自主恢复巡检任务。
3.2.3 环境检测系统及后台显示
智能巡检机器人采用了温湿度传感器、PM2.5检测传感器、烟雾检测传感器、噪音检测传感器以及火焰检测传感器,通过上述传感器组成的环境检测系统,能让机器人实时检测周围环境状态,判断库房是否存在隐患,并且会将传感器的数据传送到后台显示系统实时显示。无论机器人处于哪种巡检方式,机器人都将巡检过程中,通过机器人搭载的各种传感器实时的对所处环境周围进行实时监测,并将实时的数据显示在机载操控端上,当数据出现异常或其他紧急情况,机器人将通过声光报警器进行报警,同时通知远程监控室前来处置。系统后台显示如图4 所示。
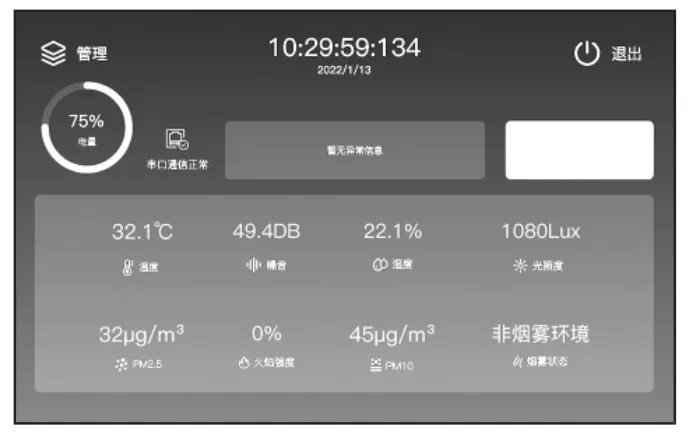
图4 智能安保巡检机器人后台显示Fig.4 Backstage display of intelligent security inspection robot
由后台显示图能够看到,每一项环境检测数值及当前环境状况均能清楚的显示,包括机器人目前的状态、电量、时间等。
3.2.4 人机交互系统
语音交互系统可以通过语音唤醒词唤醒语音助手,通过语音助手对机器人下发指令,如控制机器人移动至提前预设目标点;通过语音助手实现机器人导引解说功能,实现机器人语音播报功能;同时在机器人自主巡检过程中能实时对所处环境检测信息的播报,相较于传统巡检机器人,该智能巡检机器人大大提升了工作效率。
人脸识别系统通过Opencv 及Dlib,初始化LBPH模型后,通过机器人上的摄像头获取一张人脸数据,并自动检测是否需要对人脸进行校正,然后使用模型预测,通过模型预测实现了人脸检测及识别功能,通过管理员账号密码登录系统后,绑定对应的账号及人脸信息后,即可通过人脸登录操控端系统。
3.3 库房巡检应用
智能巡检机器人系统主要应用模式为库房内部署智能安保巡检机器人,具备智能巡检、物资管理、查库签到、语音交互、视频监控、环境检测和火灾监测功能;同时在监控室内工作人员通过显示屏可实时查看各库房内机器人的运行情况,如图5所示。

图5 智能安保巡检机器人应用示意图Fig.5 Schematic diagram of application of intelligent security inspection robot
3.4 库房巡检效果与先进性
安保巡检机器人的先进性主要体现在3 个方面:一是移动平台性能的优越性,主要体现在负载能力以及转向方式,高负载能力和灵活的转向方式提高了智能安保巡检机器人的环境适应能力以及灵活性,更好地实现机器人的动态自主规划路径问题,解决了智能安保机器人因环境要求而受限制的问题;二是整体系统联动性,高度集成的机器人终端系统具备多种系统,能实现查库签到、物资管理、环境检测等功能,根据场景应用需求可进行针对性开发集成,专用性强;三是多传感器融合的高度集成性,多种传感器融合的技术实现对机器人所处环境的全方位的检测,同时,基于云端服务器的支持完成了多台机器人联动,解决了智能安保巡检机器人在环境检测功能单一的问题。
4 结语
本文从某单位智能安保巡检机器人实际应用情况出发,从设计原理和应用实践两个方面,介绍了一款安保巡检机器人,将智能安保巡检机器人等新技术与无人值守库房结合,基于实际应用场景的需求,搭建了多机器人协同作业的功能,辅助安保、巡检人员进行全天候的安保工作,设计实现一套针对仓库的智能安保巡检机器人系统。工作人员通过远程操控智能巡检机器人完成库房的巡检任务,可以使工作人员远离现场,有效减少意外人身事故的发生;通过机器人巡检从而代替人工巡检,有效解决了现阶段人手不足的问题,有效节约了人力资源成本,为仓库无人值守模式的推广提供了创新技术支撑。
猜你喜欢
公民与法治(2022年6期)2022-07-26
领导决策信息(2018年50期)2018-02-22
传媒评论(2017年9期)2017-12-20
商周刊(2017年5期)2017-08-22
中国卫生(2016年2期)2016-11-12
中国总会计师(2016年2期)2016-03-28
中国工程咨询(2016年4期)2016-02-14
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
