
水力发电站智能巡检机械设备缺陷自动识别方法
2024-01-05 08:04蒋勤伟
自动化与仪表 2023年12期
田 云,赵 娅,叶 波,蒋勤伟
(1.国家电投集团贵州金元遵义水电开发有限公司,遵义 563000;2.国家电投集团贵州金元股份有限公司,贵阳 550081)
电力的需求日益增长,水力发电站作为一种清洁能源供应方式也受到了社会的广泛关注[1-2]。水力发电站智能巡检机械设备是指应用智能技术和传感器等装置,对水力发电站中的机械设备进行自动化巡检和监控的设备。通过引入智能巡检机械设备,可以实现对水力发电站的机械设备进行全面、精准的监测和管理,提高设备的可靠性。但由于水力发电站机械设备常常暴露于高湿度、高温度、腐蚀性介质等恶劣环境中,这些外部环境因素可能对设备造成损害,影响水电站的安全性,为此,需要研究一种水力发电站智能巡检机械设备缺陷的自动识别方法。
文献[3]对旋转机械缺陷展开全息希尔伯特谱分析(Holo-Hilbert spectral analysis,HHSA)。根据双层经验模态分解结构的方法对设备振动信号中的内部调制特性展开描述,为了解决机械设备信号中出现的一些噪声和对其缺陷识别造成干扰的问题,用改进HHSA 方法对设备信号中的噪声展开约束,针对机械设备缺陷使用IHHSA 方法完成识别。该方法对设备缺陷识别所需的时间较长,存在设备缺陷识别效率低的问题;文献[4]设计了一个宽的卷积层初步融合信息,并扩展模型的接收域。基于残差块建造3 个独立的并行分支网络,且在并行分支网络中设计了多尺度卷积核,分别对输入网络的信号展开特征提取,根据动态加权层构建全局信息建模特征通道当中的非线性关系,并重新标定每个尺度上的特征通道,融合3 个尺度特征,通过分类器实现缺陷识别。该方法对于设备缺陷信号的噪声处理效果较差,存在去噪效果弱的问题;文献[5]针对变分模态分解算法中存在的相关参数,通过麻雀算法对其优化提出SSA-VMD 算法,采用SSA-VMD 算法对设备信号展开分解,得到若干个模态分量,引入皮尔逊相关系数分析原始设备信号与模态分量之间的关系,根据分析结果选择保留或剔除分量,通过重构分量实现信号去噪,提取信号的时频特征与熵特征,将其输入轻量级梯度提升机中,通过迭代训练完成缺陷识别。但该方法对于分析设备缺陷的特征类型较差,缺陷识别精度还需进一步提升。
为了解决上述方法中存在的问题,提出水力发电站智能巡检机械设备缺陷自动识别方法。
1 设备信号处理与特征提取
1.1 信号去噪处理
为了提高智能巡检机械设备缺陷识别的精度,所提方法结合非下采样小波变换方法[6]对智能巡检机械设备产生的信号展开去噪处理。
非下采样小波变换具有2 个特点:平移不变性和冗余性。设水力发电站智能巡检机械设备的一维信号函数为d(x),将d(x)投射到子集Wj的每一步j上,投影Zj的过程可通过函数d(x)和尺度函数的积描述,即:
由此获取非下采样小波变换的滤波值,即:
式中:b 表示滤波器;l,m 表示离散的索引值。
则小波系数εj,l的尺度可表示为
式中:r(·)表示下采样函数。
根据离散小波变换的多分辨率算法,对上式进行变换。在变换期间两点取一点,每变换一次,函数d(x)的长度会缩小原来的一半。不断重复上述过程,当函数的d(x)长度为1 时终止变换。
通过式(4)对设备信号展开上采样操作,完成信号的去噪处理,获得去噪后的设备信号εj+1,l:
根据上述过程,可以对智能巡检机械设备产生的信号实现信号去噪。通过去除噪声,有助于消除噪声引起的干扰,使原始信号更加清晰,突出信号特征,方便信号特征的提取。
1.2 信号特征提取
在水力发电站中,通过信号特征提取,可以快速从复杂的信号中提取出与机械设备缺陷相关的特征,提高缺陷识别精度。通常情况下,水力发电站的机械设备处于一种正常运行状态,且存在异常样本少与非线性的特点。水力发电站智能巡检机械设备缺陷自动识别方法利用经验模式分解方法(empirical mode decomposition,EMD)[7-8]提取机械设备信号的特征并对其展开自适应分析。
EMD 方法适用于非线性过程,可以获得一连串的固有模态函数(intrinsic mode function,IMF)与一个残余函数。采用EMD 方法分解水力发电站智能巡检机械设备信号的过程如下:
(1)利用三阶样条函数对初始设备信号序列x(t)中的局部最大值展开插值,可以得到初始信号序列x(t)的上包络序列xmax(t)。利用三阶样条函数对初始信号序列x(t)中的局部最小值展开插值,可以得到初始信号序列x(t)的下包络序列xmin(t);
(2)在各个时间点计算xmax(t)与xmin(t)的平均值,得到瞬时平均序列v(t):
(3)计算去均值序列g(t)为g(t)=x(t)-v(t);
(4)若g(t)满足与过零点数目相等或上包络序列值和下包络序列值在任意一点的平均值为0这两个条件。那么g(t)为内在模式函数,反之,则将g(t)作为初始序列,重复上述步骤,直到条件得到满足;
(5)根据以上步骤会得到第1 个内在模式函数U1(t),然后计算残余序列e1(t),即e1(t)=x(t)-U1(t)。
将残余序列e1(t)作为新的初始序列,提取各内在模式函数,直到无法从剩余值序列中提取出内在模式函数为止,获取最终的信号提取结果为
式中:Ui(t)为通过分解得出的第i 个IMF;en(t)为残余函数。以此完成信号特征的提取。通过对信号进行特征提取,可以帮助运维人员准确区分设备正常运行和异常情况,提高识别的准确性。
2 设备缺陷识别
通过对提取的信号特征进行分析,可以有效获取设备运行状态的信息,基于这些信息,可以准确地判断故障类型和故障位置,提高设备缺陷识别的可靠性。根据水力发电站智能巡检机械设备的历史运行信号,建立设备的状态集,根据多维高斯贝叶斯原理[9-10]实现缺陷检测。多维高斯贝叶斯分类方法是根据设备缺陷历史样本构建贝叶斯模型,以达到各信号特征在相同缺陷集合中的联合分布概率P(X|Ck)达到最大可能性的计算方法,P(X|Ck)的表达式如下:
式中:X代表的是通过N 个相关或不相关的设备信号特征组成的矢量,即X=(x1,x2,…,xi,…,xN)T;Ck被用在设备缺陷状态分类(失效、缺陷或者工作正常)中,代表的是设备运行状态集C 的一种(Ck∈C),即C={C1,C2,…,Ci,…,Ck}。
若公式(7)的信号特征出现相互独立的情况时,可以对其计算展开简化;若公式(7)的信号特征出现不互相独立的情况时,要对其展开分析。在某一缺陷模式Ck中,如果任何一个信号特征的联合概率分布P(X|Ck)服从于高斯分布,则公式(7)可以称为高斯贝叶斯。
对于同在Ck分类中的全部Nk个信号特征,根据公式(8)计算出属于Ck的Nk个特征的联合分布概率密度P(x1,x2,…,xN|Ck),即:
式中:βk=(β1,β2,…,βN)T代表的是Ck分类中的信号特征组成的矢量;Σk代表的是Ck分类中影响信号特征组成的协方差矩阵;在X中式(8)的各特征没有出现相互独立的情况,适合水力发电站智能机械设备缺陷识别。在公式(8)中取对数,可以得到缺陷识别的计算公式为
通过求解公式(9)结合极大似然原理,针对设备某一状态Ck进行识别。若待检样本中,各个信号特征的联合分布概率密度值达到最大时,说明这个样本属于Ck状态的概率最大,从而可以确定智能巡检机械设备的状态(失效、缺陷或者工作正常),完成缺陷自动识别。
3 实验与分析
为了验证水力发电站智能巡检机械设备缺陷自动识别方法的整体有效性,需要对其展开测试。实验在Simulink 仿真环境下展开,数据采集频率为2 kHz,信号类型为振动信号,实验数据量共50 MB,具体的实验测试结果如下。
3.1 去噪效果测试
在智能巡检机械设备信息采集过程中,容易引入大量的噪声信号,对缺陷识别结果产生影响,为此需要对智能巡检机械设备信号展开去噪处理。
现引入均方误差(mean-square error,MSE)作为测试指标。均方误差ϑMSE的表达式为
式中:zt为去噪信号在波点t 处的信号值;yt为实际信号在波点t 处的信号值;H 为离散信号的总波数。
均方误差越小,去噪能力就越好。测试结果如表1 所示。

表1 均方误差测试结果Tab.1 Mean squared error test results
分析表1 中的数据可知,所提方法的均方误差随着数据量的增加而增大,但该方法的均方误差始终未超过0.97 dB2,证明所提方法去噪效果良好,验证了所提方法的有效性。
3.2 缺陷识别效果测试
展开智能巡检机械设备缺陷识别测试,实验结果如图1 所示。

图1 缺陷识别效果测试Fig.1 Defect identification effect test
分析图1 可知,所提方法缺陷识别信号的幅值与实际信号波动较为一致,仅在0.5 s 和1.5 s 处存在一些偏差,识别效果较好,验证了所提方法对于智能巡检机械设备缺陷识别的有效性。
3.3 缺陷识别精度测试
展开智能巡检机械设备缺陷识别测试,通过ROC曲线来测试缺陷识别效果,ROC 曲线下方的面积越大,表明缺陷识别精度越高,测试结果如图2所示。
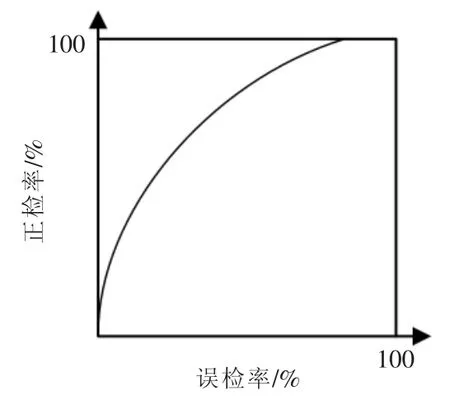
图2 ROC 曲线Fig.2 Receiver operating characteristic
分析图2 可知,所提方法的ROC 曲线面积较大,验证了所提方法对于智能巡检机械设备缺陷识别精准度。
3.4 缺陷识别时间测试
为了进一步分析所提方法的综合性能,计算该方法在缺陷识别过程中所用的时间,实验结果如图3 所示。
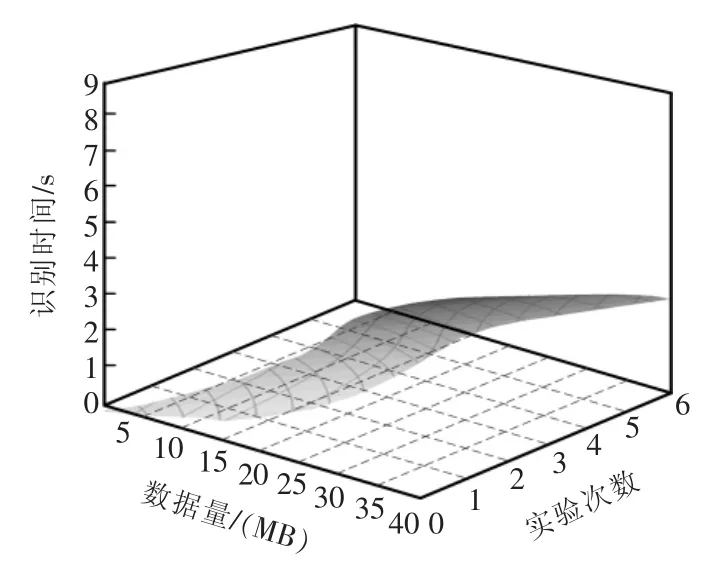
图3 缺陷识别时间测试Fig.3 Defect identification time test
分析图3 可知,所提方法的缺陷识别时间低于3 s,对设备缺陷的识别效率较高,因为所提方法对设备缺陷的信号展开了去噪处理,消除了噪声对故障诊断过程产生的干扰,提高缺陷识别的效率。
4 结语
为了保障水力发电站机械设备的正常运行,提出水力发电站智能巡检机械设备缺陷自动识别方法。对智能巡检机械设备信号展开去噪处理,分解机械设备信号提取其信号特征,根据多维高斯贝叶斯原理实现缺陷检测。在未来阶段,可在此基础上加深研究,细化机械设备缺陷的类型,提升机械设备缺陷识别的效率。
猜你喜欢
江苏安全生产(2022年7期)2022-08-24
新世纪智能(数学备考)(2021年9期)2021-11-24
中学生数理化·中考版(2021年3期)2021-07-22
汽车维修与保养(2021年12期)2021-03-08
新世纪智能(数学备考)(2020年9期)2021-01-04
中学生数理化(高中版.高考数学)(2020年9期)2020-10-28
疯狂英语·新策略(2019年10期)2019-12-13
汽车维修与保养(2019年4期)2019-09-11
当代陕西(2019年10期)2019-06-03
数学小灵通·3-4年级(2017年9期)2017-10-13
