
基于STM32 的盲人避障系统的设计与实现
2024-01-05 08:04李自成
自动化与仪表 2023年12期
张 磊,李自成,吴 卓
(武汉工程大学 电气信息学院,武汉 430205)
据世界卫生组织数据显示,目前我国至少有1400万盲人,在出行方面面临着巨大的挑战[1]。视力障碍导致他们的机动性降低、独立出行能力受限,增加了受到意外伤害的可能性。为了改善盲人的生活,人们运用现代电子和计算机技术,开发了多种帮助盲人出行的产品。包括电子导盲器、电子导盲轮椅、电子导盲拐杖、导盲机器人等。电子导盲器在早期导盲设备中较为常见,包含多个超声波测距模块,可探测各个方向的障碍物,通过语音播报模块进行反馈[2]。电子导盲轮椅包含避障模块、循迹模块,可探测各个方向的障碍物,通过APP 可进行远程控制[3];电子导盲拐杖具有传统导盲拐杖的外观,集成了GPS 模块、语音播报模块等,具有障碍探测、语音提示、跌倒报警等功能[4-6];导盲机器人具有独立行走的能力,主要原理是机器人对前方环境进行监测分析,然后将分析结果再对盲人进行提示[7-9]。
这些电子导盲产品的种类较多,但具有实用性和价格优势的较少。针对上述问题,本项目旨在结合各种方案的优点和长处,结合TOF(time of flight)测距技术、USB 数据传输技术,设计开发出一种价格低、功耗小、易携带、且功能完备的穿戴式导盲设备,为盲人的日常出行保驾护航。
1 系统整体框架
本文系统按照功能可划分为运动感知、数据采集与处理、数据传输、数据显示、结果反馈5 个部分,系统的整体框架如图1 所示。

图1 系统框架Fig.1 System framework
运动感知部分负责通过三轴加速度传感器对视障使用者进行运动状态识别;数据采集部分利用激光测距传感器对使用者前方障碍物的距离进行初步的测量;数据传输部分通过USB 有线传输的方式对数据进行发送以及接收;数据显示部分主要负责对处理后的数据在手机界面进行实时显示;结果反馈部分通过震动、响铃或语音播报的方式对视障使用者进行提醒。整套硬件设备具有体积小、功耗低等特点。系统采用手机供电,选用的各个硬件均为低功耗模块,同时也采用了低功耗处理,可以实现长时间使用。
2 避障系统硬件设计
硬件工作流程如图2 所示。硬件通过对使用者的运动状态进行检测来判断是否唤醒设备,当设备启动后进行距离检测,并向主控芯片发送实时数据。
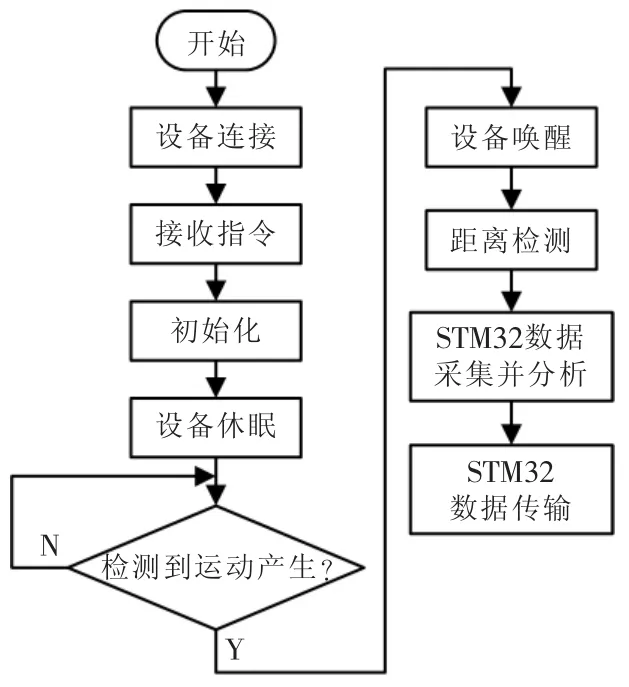
图2 硬件工作流程Fig.2 Hardware work flow chart
2.1 运动检测电路设计
LIS2DW12TR 是一种超低功耗的高性能三轴线性加速度计,由于其超小的尺寸和超低的功耗,广泛应用于物联网连接设备以及穿戴设备等。运动检测部分电路具体设计如图3 所示。

图3 运动检测电路Fig.3 Motion detection circuit
当视障人群佩戴硬件设备,LIS2DW12TR 检测三轴加速度值的变化,与设定的阈值进行比较进而分析佩戴者的运动状态。计算阈值的公式如下所示:
式中:TH 表示阈值;FS 为初始化时设置的值。当传感器实时测得加速度值大于计算得到的阈值,判断用户当前为运动状态;反之则处于静止状态。
2.2 距离检测电路设计
TOF 传感器具有体积小、误差低、工作距离远等特点。VL53L1X 可在4 m 范围内精确测距,距离检测电路如图4 所示。

图4 距离检测电路Fig.4 Distance detection circuit
激光测距传感器主要有3 种测距模式,长距离测距模式下最远测量距离360 cm,中距离测距模式下最远测量距离290 cm,短距离测距模式下最远测量距离136 cm。3 种模式中,不同的测距模式可以适应不同的光照情况,测距范围越小,受光照影响程度越小。
2.3 数据采集与传输电路设计
为了尽可能地降低设备的成本以及设备的功耗,系统采用STM32F042G6U6 单片机对数据进行传输和处理[10]。在同样的时钟8 MHz 下,STM32F042 芯片电流只有4 mA,STM32F103 芯片电流达到9 mA以上。数据采集与传输电路如图5 所示。

图5 数据采集与传输电路Fig.5 Data acquisition and transmission circuit
传感器测得的数据通过I2C 协议进行传输,统一发送至主控芯片进行处理和保存。由于测距传感器测得的数据量较大,防止终端数据显示出现突变,采用均值滤波的方法对数据进行简单处理,公式如下所示:
最终,单片机通过USB 串口将均值滤波后的数据发送至手机APP 中,完成硬件与软件之间的通信。
3 软件设计
盲人运动感知系统的软件部分是由Android Studio 开发的一款手机APP[11]。该系统软件平台可实时接收和显示硬件数据并且通过对数据分析向使用者做出反馈。为满足使用者的多样性,软件部分设置了正常模式和特殊模式,家属可以选择功能齐全的正常模式,视力障碍群体使用时则可以选择已经设定好功能的特殊模式,手机APP 的操作流程如图6 所示。
整个软件程序按功能可分为5 个界面,设备识别界面、用户模式选择界面、特殊模式界面、正常模式界面以及正常模式-模式选择界面。界面展示如图7 所示。
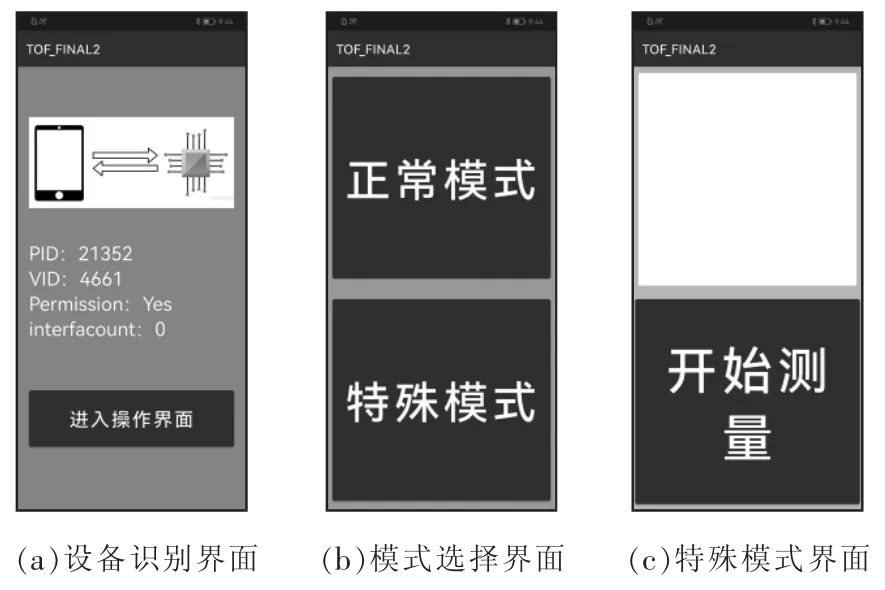
图7 软件界面Fig.7 Software interface
3.1 设备识别界面
硬件识别界面的主要功能是对插入的硬件设备进行识别,通过检测硬件设备的VID(vender ID)和PID(product ID)是否与设定的参数相同来判断所插入的硬件设备。若相同,则屏幕上会显示对应硬件设备的PID 和VID;反之,屏幕上的信息都会显示为空值,同时手机会发出警告语音提示使用者正确插入设备。
3.2 用户模式选择界面
该界面下有正常模式和特殊模式2 个按键。正常模式操作复杂,但是适应环境能力强,可根据当前环境状况操作者自行修改工作模式;特殊模式功能简单,但适应环境能力弱。
3.3 特殊模式界面
特殊模式是供视力障碍人群直接使用的一种模式,特殊模式下设置默认的硬件工作模式为长距离测距,测距频率为200 Hz,震动反馈。没有复杂的模式选择界面,因此操作简便。
3.4 正常模式界面
正常模式功能完整,有多种工作模式可供使用者选择。按下模式选择按键后进入模式选择界面,用户可在模式选择界面手动选择所需要的硬件工作模式。
3.5 正常模式-模式选择界面
进入正常模式的模式选择界面后,可根据提示选择测距模式,频率模式以及反馈模式,测距模式分为长距离模式、中距离模式和短距离模式,不同的测距模式具有不同的测量范围,光照对激光测距传感器的精度影响较大,在长距离模式下受光照影响最强,中距离模式次之,短距离模式则几乎无影响。使用者可根据不同的光照情况选择对应的测距模式。除此之外,还有3 种频率模式和3 种反馈形式可搭配使用。
4 实验验证
本实验采用正常光照条件下的试验场地,实验人员佩戴硬件设备,使用者根据语音提示在APP 上设置完成硬件工作模式,系统进入运行状态。其中硬件设备如图8 所示。

图8 硬件设备Fig.8 Hardware devices
当LIS2DW12TR 三轴加速度传感器采集到实验人员的运动信息后,向STM32 发送运动状态指令,STM32 根据接收到的状态指令控制VL53L1X激光测距传感器启动,开始测量实验人员与障碍物间的距离。与此同时,硬件部分通过USB 接口实时向Android 设备发送距离数据,Android APP 根据接收到的距离数据进行实时显示。
随着实验人员移动,距离障碍物的距离也越来越近,当距离小于警告阈值且大于危险阈值时,手机会根据用户设置的反馈模式进行相应的警告提醒,当实验人员与墙面的距离小于危险阈值时,手机则会进行对应的危险提醒。本实验设置的警告范围为500 mm~1000 mm,危险范围为0 mm~500 mm,在一段时间内,时间与距离的部分数据如表1 所示。
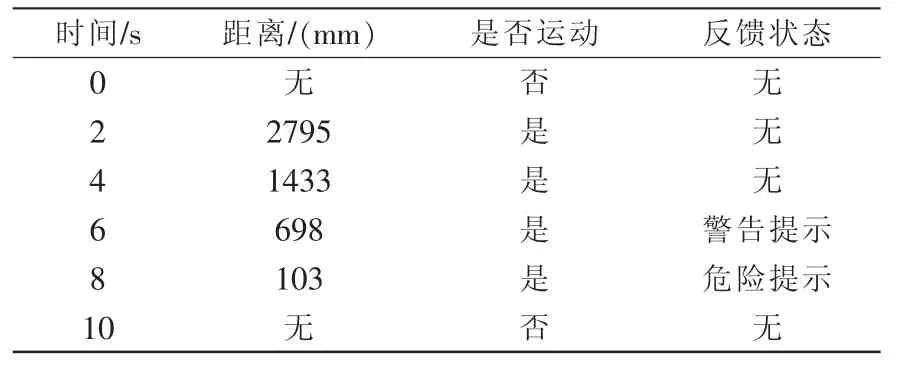
表1 测距实验记录Tab.1 Distance measurement experiment records
根据实验数据可以看出,此系统只有在检测到使用者的运动状态后才开始工作,当使用者向前运动时能够实时检测与前方障碍物的距离,当使用者停止运动超过一段时间后硬件部分会自动关闭激光测距模块,同时关闭硬件系统与软件系统之间的数据传输,同时,整个系统将进入低功耗模式。
5 结语
本文设计实现了一种基于STM32 的盲人运动感知避障系统,该系统将硬件与软件相结合。利用STM32 低功耗处理器,LIS2DW12TR 低功耗三轴加速度传感器,VL53L1X 激光测距传感器,实现了低功耗智能化动态距离检测。整套系统具有易携带、功耗低、操作简单、可靠性高的特点,可大大减少视力障碍人群出行所消耗的人力物力,提高出行效率。在后续的研究中,将对手机端进行优化,将视障群体的实时状态反馈到家人,进一步提高该系统智能化能力。
猜你喜欢
玩具世界(2022年3期)2022-09-20
客联(2022年3期)2022-05-31
科学(2020年3期)2020-01-06
测控技术(2018年10期)2018-11-25
好日子(2018年5期)2018-05-30
科学大观园(2018年2期)2018-05-30
电子制作(2017年7期)2017-06-05
中国新闻周刊(2016年33期)2016-10-27
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
太空探索(2014年1期)2014-07-10
