基于虚实映射模型的惯容惯质系数测试与验证∗
2024-01-05 07:16李月昊胡茑庆黄良远
振动、测试与诊断 2023年6期
李月昊, 程 哲, 胡茑庆, 黄良远, 肖 卓
(1.国防科技大学智能科学学院 长沙,410073)
(2.国防科技大学装备综合保障技术重点实验室 长沙,410073)
引 言
惯容器[1]是基于机电相似理论的一种双端动力学元件,其动力学特征表现为惯性。与电学中电容器的容性类似,施加在惯容器两端的力与这两端间的相对加速度成正比,这一比例即为惯质系数。动力学中的传统惯性元件——质量,定义在惯性系中,其一端总是接地,并不是一个真正的双端元件,因而与质量对应的电学元件为接地电容。若电路系统中仅由接地电容构成,其结构与功能均会受到接地条件的限制。实际应用中的电容并不须一端接地,从而基于“电容-电感-电阻”基本结构演变出复杂多样且功能纷繁的电路系统。惯容的提出完善了机电相似理论,使得 传统“质量-弹簧-阻尼”系统中亦可存在接于两质量之间的惯性元件——惯容,从而产生“ 惯 容-弹 簧-阻 尼”(inerter-spring-damper, 简 称ISD)[2]系统,而质量即可视作一端接地的惯容器。
基于“惯容-弹簧-阻尼”基本结构,学者们面向不同应用场景,主要针对振动控制问题,提出了多种含惯容器的机械系统,例如ISD 悬架系统[3-6]、调谐质 量 惯 容 阻 尼(tuned-mass-damper-inerter, 简 称TMDI)[7-9]系 统 以 及电液惯容弹簧阻尼(hydraulic electric-inerter spring damper, 简 称HE-ISD )[10]系统等。这些机械系统极大地丰富了动力学理论,解决了诸多工程实际问题,惯容亦在这些应用场景中表现出良好的振动控制效果。
惯容器不仅丰富了机械系统,亦使得质量由机械结构的固有属性变为可设计的结构参数。惯容器已有多种实现形式,如齿轮齿条惯容器[11-12]、滚珠丝杠惯容器[13-15]、液压马达惯容器[16]、流体惯容器[17]以及机电式惯容器[18]等,均可实现所需的惯质系数这一核心设计参数。
为保证惯容器被合适安装,确保惯容器工作于理想惯质系数状态,提升惯容器运行维护性能,笔者基于惯容器动力学模型与惯质系数测试实验平台,建立了面向惯容器安装预紧力评估的虚实映射模型及其实验系统。该系统中滚珠丝杠惯容器一端固定,以低频简谐力作为惯容器输入,通过激光位移传感器获取滚珠丝杠惯容器另一端位移响应,将该响应与模型仿真输出进行对比分析,为近实时调整实验平台的安装预紧力提供指导。结果表明,虚实映射系统可有效近实时地判断惯容器的安装预紧力的大小,从而实现对惯容器的动态调控,为惯容器以理想惯质系数平稳工作提供基础,为惯容器的安装与运行维护提供技术指导。
1 惯容器模型与惯质系数测试
1.1 惯容器动力学模型
惯容器的动力学特性表现为惯性,其动力学模型如图1 所示。其中:F1,F2分别为作用于惯容器端点1 与端点2 的外力;x1,x2分别为惯容器端点1 与端点2 的位移;b为惯容器惯质系数。

图1 惯容器动力学模型Fig.1 Dynamic model of inerter
根据图1,有
式(1)表示作用于惯容器两端点的力与这两端点间的相对加速度成正比,这一比例即为惯质系数。
1.2 惯质系数测试实验原理
惯容器惯质系数测试实验原理如图2 所示。其中:Fv为振动台所施加简谐力;Pv为简谐力幅值;ωv为简谐力角频率;t为时间;kv为振动台内部悬挂弹簧刚度,zb为惯容器非固定端位移,ce为等效阻尼。

图2 惯质系数测试实验原理Fig.2 Schematic of inertance test experiment
测试惯容器惯质系数,采用固定惯容器一端,使用振动台对惯容器另一端施加简谐力,采集力信号与惯容器非固定端位移信号,从而计算惯容器惯质系数。等效阻尼ce主要为惯容器自身结构阻尼,通常认为其极小(惯质系数接近理论值时),但通过实验发现,其为惯容器主要非线性因素,受预紧力影响而波动极大。根据图2,有
zb的稳态解可表示为
其中:φ为初始相位(因为仅关注zb幅值,予以忽略)。
在本研究中,由于kv远小于bωv2,且当ce影响可以忽略(惯容器安装预紧力合适)时,式(3)可简化为
其中:zbv为zb的幅值,可从激光位移传感器采集的位移信号中获得;Pv与ωv可从力传感器采集的力信号中获得。
根据式(4)可计算得到惯质系数。由于惯容器安装预紧力的影响,其非固定端会产生速度波动。速度波动通过积分效应造成位移响应偏移较大,此时可对zb进行离散求导获取其速度vb。由式(5)计算得到惯质系数
其中:vbv为惯容器非固定端速度vb的幅值。
1.3 滚珠丝杠惯容器惯质系数测试实验
本研究以滚珠丝杠惯容器作为实验对象,通过实验验证面向惯容器的虚实映射模型。滚珠丝杠惯容器结构简图如图3 所示。

图3 滚珠丝杠惯容器结构简图Fig.3 The structure diagram of the ball-screw inerter
滚珠丝杠惯容器主要由壳体、螺母、丝杠、飞轮以及轴承(通常为角接触球轴承)等构成,通过滚珠丝杠传动机构,将丝杠的直线运动转化为螺母及其上飞轮等旋转部件的旋转运动,其一端点位于丝杠上,另一端点位于壳体上。
记滚珠丝杠传动机构的导程为Ps,滚珠丝杠惯容器中随螺母一同旋转的旋转部件相对其共同转轴的转动惯量为Ir,螺母与飞轮等部件相对两端位移静平衡位置所对应角度位置的弧度为θs,旋转角速度为ωs。
根据滚珠丝杠传动机构传动特性,有
忽略摩擦力和平动部件的平动动能与平动惯性,以端点1 为参考系,考虑微元时间dt内外力做功与滚珠丝杠惯容器动能的关系,有
式(7)两端同时除以dt,并代入式(6)可得
忽略摩擦力和平动部件的平动动能与平动惯性,以端点2 为参考系,考虑微元时间dt内外力做功与滚珠丝杠惯容器动能的关系,有
式(9)两端同时除以dt,并代入式(6)可得
由式(8)与式(10)可得
因此,滚珠丝杠惯容器的理论惯质系数表达式为
通常惯容器惯质系数远大于自身质量,故一般情况下,忽略平动部件平动动能与平动惯性是合适的。由于滚珠丝杠惯容器自身结构中存在安装预紧力,预紧力的一部分用于保证稳固的连接,另一部分则会使得支撑轴承预紧。使轴承预紧的部分预紧力会为螺母附加一阻力矩,该力矩被滚珠丝杠机构转化并放大为丝杠平动方向上的阻力,使得滚珠丝杠惯容器偏离理论惯质系数。当简谐力加载时,该阻力矩与等效阻力亦会变化。记安装预紧力等效附加力矩为Mte,其在丝杠平动方向上的等效阻力为Fte,则有
在同样的输入简谐力情形下,过大的安装预紧力会使测得的位移幅值偏小,计算得到的滚珠丝杠惯容器惯质系数实验值偏大;而过小的预紧力会使得安装不稳固,螺母与轴承整体出现丝杠平动方向上的窜动,使测得的位移幅值偏大,计算得到的滚珠丝杠惯容器惯质系数实验值偏小。以上两种情形均为不正确安装,当预紧力合适时,测得的滚珠丝杠惯容器惯质系数接近理论值。
滚珠丝杠惯容器惯质系数测试实验系统参数如表1 所示。

表1 惯质系数测试实验系统参数Tab.1 Parameters of the inertance test experiment system
当预紧力合适时,惯容器安装稳固,惯容器轴承附加阻力矩微小,此时测试得到的惯质系数接近理论值。输入力频率为5 Hz 且预紧力合适时的力与位移曲线如图4 所示,其中,Pv=155.5 N,zbv=3.14×10-5m,可得测试惯质系数为5 017 kg,接近理论值5 280 kg。
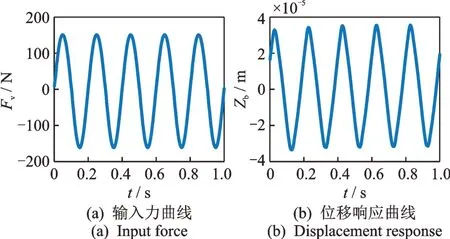
图4 输入力频率为5 Hz 且预紧力合适时的力与位移曲线Fig.4 The input force and displacement when frequency is 5 Hz and pre-tightening force is right
输入力频率为0.5 Hz 且预紧力合适时的力与位移曲线如图5 所示,其中Pv=74.8 N,zbv=1.33×10-3m,可得测试惯质系数为5 698 kg,接近理论值5 280 kg。

图5 输入力频率为0.5 Hz 且预紧力合适时的力与位移曲线Fig.5 The input force and displacement when frequency is 0.5 Hz and pre-tightening force is right
当预紧力偏大时(本研究通过拧紧惯容器安装螺钉增加预紧力),惯容器安装稳固,但惯容器轴承附加阻力过大,导致所得位移信号偏移加大,计算得到的速度幅值偏小,惯质系数严重大于理论值。输入力频率为5 Hz 且预紧力过大时的力与位移曲线如图6 所示,其中,Pv=79.8 N,zbv=8.71×10-6m,vbv=2.74×10-4m/s,可得测试惯质系数为9 270 kg,大于理论值5 280 kg。

图6 输入力频率为5 Hz 且预紧力过大时的力与位移曲线Fig.6 The input force and displacement when frequency is 5 Hz and pre-tightening force is too large
当预紧力偏小时(本研究通过拧松惯容器安装螺钉减小预紧力),惯容器轴承附加阻力微弱,但惯容器安装欠稳固,螺母与轴承整体出现丝杠平动方向上的窜动,导致所得位移信号幅值偏大,计算得到的速度幅值偏大,惯质系数严重小于理论值。输入力频率为5 Hz 且预紧力过小时力与位移曲线如图7所示,其中,Pv=71.1 N,zbv=4.43×10-5m,vbv=1.39×10-3m/s,可得测试惯质系数为1 630 kg,小于理论值5 280 kg。

图7 输入力频率为5 Hz 且预紧力过小时力与位移曲线Fig.7 The input force and displacement when frequency is 5 Hz and pre-tightening force is too small
2 惯容器虚实映射模型构建
为有效区分合适的安装预紧力与不当的安装预紧力,便于惯容器的运行维护,本研究基于滚珠丝杠惯容器建立了惯容器虚实映射模型,并搭建了滚珠丝杠惯容器虚实映射实验系统,如图8 所示。

图8 滚珠丝杠惯容器虚实映射实验系统Fig.8 The virtual-real mapping system of the ball-screw inerter
该系统主要由滚珠丝杠惯容器、信号发生器、振动台、力传感器、激光位移传感器、振动台功放、力传感器终端、数字采集卡、计算机及实验台架等构成。滚珠丝杠惯容器端点2(壳体)与实验台架固联,端点1(丝杠)与振动台输出端及力传感器固联。信号发生器产生简谐电压信号输出至振动台功放,振动台功放产生驱动电流以驱动振动台产生简谐激励力。力传感器及其终端可采集输入力信号。激光位移传感器及采集卡可采集端点1 的位移响应。力信号与位移信号由计算机进行处理与分析。
惯容器虚实映射模型将来自实体层的输入力信号与位移信号读入模型层(仅需若干输入力周期内的信号),提取输入力信号的参数,从而设置Simulink 模型的部分输入并进行Simulink 仿真,仿真得到虚拟位移与虚拟速度。由于所需数据量小且输入力稳定,所得虚拟位移、虚拟速度可与采集时间内的位移信号及其计算得到的速度做虚实映射,亦可与当前时间内滚动显示的位移信号做虚实映射。虚实映射可判断当前惯容器是否工作在理想惯质系数状态,安装预紧力是否失当,进而进行运行维护,调整安装预紧力。另外,亦可设置所采集数据定时保存,此时该模型可循环更新虚拟位移与虚拟速度(取决于采集卡与传感器工作方式)。惯容器虚实映射模型如图9 所示,其中Simulink 部分如图10 所示。

图10 惯容器虚实映射模型Simulink 部分Fig.10 Simulink part of the virtual-real mapping model of inerter
图10 所示模型中,对输入力信号进行快速傅里叶变换可得Pv与ωv,b设置为理论惯质系数,ce可设置为0,b与kv参数见表1,其中zbs为虚拟位移,vbs为虚拟速度。该Simulink 模型可与Matlab 工作区直接交互,所有参数均可由程序设置并由程序控制开始仿真。获取一定数据量的信号后,该模型仅需一开始操作,即可实现虚实映射。
3 虚实映射实验验证
图11 为输入力频率为5 Hz 且预紧力合适时的虚实映射,其对应的实际输入力和实际位移与图4相同,此时惯容器安装预紧力合适,惯容器安装稳固,惯质系数接近理想情况。由于受积分效应影响,虚拟位移未至稳态,略有偏差,但虚拟速度已至稳态且与实际速度契合良好。
图12 为输入力频率为5 Hz 且预紧力过大时的虚实映射,其对应的实际输入力与实际位移与图6相同,此时惯容器安装预紧力偏大,惯容器安装过稳固,测试惯质系数偏大。实际位移信号波动较大,其幅值小于虚拟位移。实际速度信号非平滑,其幅值小于虚拟速度。

图12 输入力频率为5 Hz 且预紧力过大时的虚实映射Fig.12 The virtual-real mapping results when frequency is 5 Hz and pre-tightening force is too large
图13 为输入力频率为5 Hz 且预紧力偏小时的虚实映射,其对应的实际输入力与实际位移与图7相同,此时惯容器安装预紧力偏小,惯容器安装欠稳固,测试惯质系数偏小,惯容器轴承与滚珠丝杠副螺母整体窜动,实验中冲击噪声明显。实际位移信号波动较大,其幅值大于虚拟位移。实际速度信号幅值大于虚拟速度。

图13 输入力频率为5 Hz 且预紧力过小时的虚实映射Fig.13 The virtual-real mapping results when frequency is 5 Hz and pre-tightening force is too small
所建立的滚珠丝杠惯容器虚实映射模型及其实验系统能够有效区分合适的安装预紧力及过大、过小的安装预紧力,可验证面向惯容器的虚实映射模型原理。实际上,该虚实映射模型并不局限于滚珠丝杠惯容器,其他类型的惯容器,如齿轮齿条惯容器等,均可基于相似原理建立虚实映射模型。
4 结 论
1) 基于滚珠丝杠惯容器进行了惯容器惯质系数测试实验,验证了惯容器动力学模型及滚珠丝杠惯容器惯质系数表达式。惯容器惯质系数易受安装预紧力影响,过大的安装预紧力会使测试惯质系数偏大,过小的安装预紧力会使测试惯质系数偏小,仅在安装预紧力合适时,惯容器惯质系数接近理论值。
2) 建立了惯容器虚实映射模型及其虚实映射实验系统,开展了虚实映射实验。实验结果能够有效区分合适的安装预紧力以及过大、过小的安装预紧力,可验证面向惯容器的虚实映射模型原理。该虚实映射模型有利于保证惯容器合适的安装,监测惯容器是否工作于理想惯质系数状态,为惯容器运维保障提供技术支撑。
猜你喜欢
阅读(快乐英语中年级)(2022年11期)2022-05-30
读者·校园版(2019年24期)2019-12-10
制造技术与机床(2019年11期)2019-12-04
小朋友·聪明学堂(2015年8期)2015-11-30
深圳职业技术学院学报(2015年5期)2015-11-30
机械制造与自动化(2014年1期)2014-03-01
机械与电子(2014年3期)2014-02-28