
海洋通导一体化系统的发展与趋势
2024-01-08 03:52陈冠旭刘经南刘焱雄刘杨李梦昊
哈尔滨工程大学学报 2023年11期
陈冠旭, 刘经南, 刘焱雄, 刘杨, 李梦昊
(1.自然资源部第一海洋研究所 海洋测绘研究中心, 山东 青岛 266061; 2.自然资源部 海洋测绘重点实验室, 山东 青岛 266061; 3.武汉大学 卫星导航定位技术研究中心, 湖北 武汉 430079)
通信和导航原本是一体的,用于通信的信号通常亦可用于导航[1-4]。由于不同的功能侧重,2种技术呈现出分离发展的特征。随着智能时代的到来,以万物互联为特征的泛在网正在快速发展[5-6]。为达到泛在网的智能管理和协同控制的目标,需利用导航系统将精准时空信息赋给通信系统,也需利用通信系统来增强导航系统的服务能力,进而需要通导一体化的系统。
海洋占地球表面积的71%,平均深度达3 700 m,它不仅对全球环境和气候变化有着巨大的影响,而且它的内部还贮藏着丰厚的油气、矿产、生物以及基因等自然资源,使得理解并开发海洋成为人类文明发展的关键[7-8]。因此,在智能时代,需要将通导一体的泛在网覆盖到海洋内部,进而把整个立体海洋纳入人类的认知和控制范围。
北斗/GNSS(global navigation satellite system)作为唯一的全球性、高精度、高稳定度的时空基准,目前正通过增加低轨通信卫星、融合5 G技术等方式升级为通导一体化的“新型基础设施”[9]。北斗/GNSS和常用的无线通信系统的信号载体均为电磁波,但电磁波在水体中衰减严重,故以北斗/GNSS为核心的全球性通导体系将无法直接用于海洋内部[10]。海洋常用的信号载体中,声波在水体中的衰减最小、传播距离最远,所以水下通信和导航系统以声学技术为主、并辅以其他手段进行建设[11]。
目前,水下的通信和导航系统基于不同的功能需求,发展了不同的信号体制和硬件设备,这种分离发展的模式有助于技术的快速进步,但它却不利于海洋泛在网络的建立以及其与全球性通导体系的对接。因此,亟需加快发展水下通导一体化技术,融合构建海洋通导系统,充分发挥通信和导航的能力,提升设备和能源的利用率。针对上述目标,本文分别对水下通信、水下导航及水下通导一体化等3项技术的发展进行梳理,并对海洋通导一体化系统的发展趋势进行分析。
1 水下通信技术
声波、甚低频/超低频电磁波和蓝绿激光等常被当作水下无线通信的信号载体,它们对应的通信技术各具特点[12-13]。声波在海水中可长距离传播,其传播过程主要受扩散损失和吸收损失的影响。扩散损失是声波波阵面扩散导致的能量损失,与传播距离的平方成正比;吸收损失则与声波频率的平方正相关,频率越高则损失越大。俄罗斯和美国的试验表明:低频率的声波(一般小于100 Hz)在海水中最远可以传播数千公里[14-15]。相对于声波,甚低频/超低频电磁波和蓝绿激光在海水的传播衰减严重。目前,甚低频/超低频电磁波在海水中的传播距离最远仅约100 m[16-17],蓝绿激光实现了约300 m的纵向海水穿透[18-19]。因此,水下电磁波通信和水下光学通信只适合短距离数据传输;声学通信可在水下进行远程数据传输,是目前水下远程无线通信的主要方式。由它们组成的水下无线通信网络见图1。
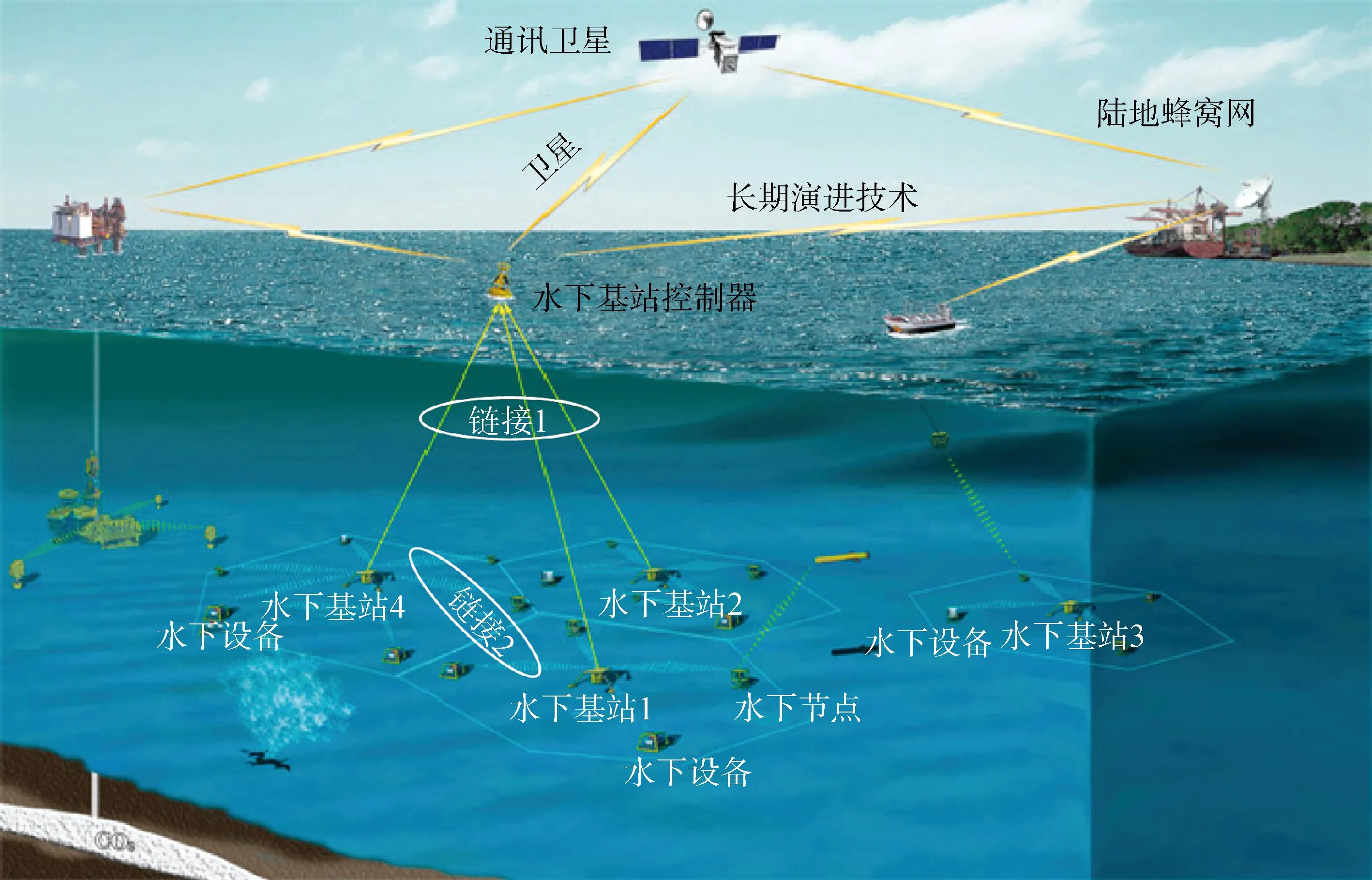
图1 水下无线通信网络概念图[7]Fig.1 Concept graph of underwater wireless communication network[7]
1.1 水下声学通信
1945年,美国海军实验室研发出基于声波的水下电话,用于潜艇间的通信,标志着水声通信系统的诞生[20]。该系统采用单边带调制技术,工作频率为8.33 kHz,作用距离可达几千米[21]。由于声波在海水中的传播损失,水声通信的工作频率受到限制,可用带宽较窄。对于传播距离越远的声波,其可用带宽就越窄。若需传输100~1 000 m,相应声波的带宽约20~50 kHz;若需传输1~10 km,相应声波的带宽小于10 kHz;若需传输80 km,相应声波的带宽仅为500 Hz[22]。因此,水声通信的数据传输速率很慢。
早期的水声通信主要采用模拟调制技术。1950年代末,基于该技术研制的工作频率为20 kHz的水声通信系统,实现了海面平台与水下设备之间的通信[23]。然而,模拟调制技术的信号容易受水声信道影响而发生畸变,导致信息丢失或失真。1970年代,水声通信开始使用数字调制技术[24],主要为采用能量检测模式(非相干)的频率偏移调制,提高了数据传输的可靠性,并在时域和频域上对信号畸变进行了补偿。然而,非相干通信系统频带利用效率低,通常不超过0.5 (bit/s)/Hz。基于有限的水声信道带宽,非相干声学通信系统的数据传输速率仅为数百比特每秒,不适合图像传输等高传输速率的应用[25]。
1980年代,水声通信开始使用基于相位检测模式(相干)的相位偏移调制,其中差分相位偏移调制的应用最为广泛,使带宽利用率提高了一个数量级,数据传输率、抗频漂能力及抗多径效应能力都有了很大提升。1990年代,水声通信采用正交相位偏移调制技术实现了传输速度为l kbit/s的通信服务。而后,其他单载波相干通信技术又相续问世(如正交幅度调制),进一步提高了水声信道频谱利用率,传输速率也提高至5 kbit/s左右[25]。然而,单载波相干通信技术在浅海水平信道中受码间干扰影响严重。
近年来,陆基通信技术在水声通信中的成功实现或使用,使得水声信道传输速率和性能又有了明显的提高[26-27]。正交频分复用技术(orthogonal frequency division multiplexing,OFDM)是应用最为广泛的多载波调制技术,它将一个高速的数据流分解为若干低速的子数据流,然后再调制相应的子载波,构成并行信号进行传输,克服了单载波通信中单次干扰可中断整个传输链路的问题,并能够使用简单的频域均衡消除水声信道的码间干扰,极大地提高了水声通信的传输能力和抗干扰能力[25]。由于水声信道的复杂性,OFDM在水下通信中的应用仍面临时间同步等技术难题。此外,码分多址扩谱技术可为水下多用户间的通信提供技术支撑[28]。水下多输入多输出技术(multiple-input multiple-output,MIMO)[29]在有限的频谱资源条件下,可有效提高频谱利用率,为通信系统提供空间复用增益和空间分集增益,以提高信号的稳定性和信噪比。
2005年,美国麻省理工学院的Milica Stojanovic利用零填充正交频分复用技术在浅海区域进行了水声通信试验,结果表明:在2.5 km的距离内,通信速率能够达到30 kbit/s[30]。目前,美国密歇根大学、斯坦福大学等大学的研究人员已在实验室环境下证明了利用协同降噪技术可使水声通信速率达到约100 kbit/s。美国康涅狄格大学周胜利等和密西根理工大学王昭辉[31]系统地研究了OFDM,并研制了相应的商业水声通信机。厦门大学研制了水下语音通信系统和图像传输系统,浅海试验表明:该语音传输系统的作用距离可达10 km;对于水下图像传输系统,当水平距离820 m时,通信速率为1.5 kbit/s[32]。2002年,我国在“十五”计划期间提出了采用相干通信技术进行图像高速传输和采用非相干通信技术进行传感器数据中速传输的中程高速数字化水声通信的技术方案,实现8~10 km距离内最高10 kbit/s的速率传输数据、语音和图像,目前正将作用距离延拓至12 km[27]。
总体来看,水声通信虽是目前进行水下远程信息传输的主要方式,但水声信道作为自然界中最复杂的无线信道之一,为水声通信带来很多挑战,主要包括:1)水声通信的频率低、工作带宽有限、数据传输率较低、传播时延大;2)声波的传播速度由海水介质的特性(压力、温度、盐度)所决定,而海水介质的分布既在空间上不均匀、又具有时变特征,进而导致声线弯曲,也使得水声通信的传输不稳定且存在起伏效应;3)受海洋噪声(洋流、潮汐、波浪、湍流、内波)、声波界面反射和随机散射的影响,水声通信的误码率高、多路径效应强等。
目前,水声通信研究主要集中在美、英、日、法、德等国家的大学和科研机构[33],一些国外公司(如:美国Teledyne Marine、美国LinkQuest、英国Tritech、澳大利亚DSPComm、德国Evologics和挪威Kongsberg等)研发了许多商用的水下通信产品(水下声学调制解调器)[34]。我国科研单位于1990年代才开始对水声通信技术展开深入地研究,起步相对较晚。目前,中国科学院声学研究所、哈尔滨工程大学、杭州应用声学研究所、厦门大学、浙江大学、西北工业大学、武汉大学、东南大学等单位已在水声通信领域取得一定的科研成果[21],主要包括:水下语音通信、水下图像传输、扩频通信、远程遥控、通信网络、非相干通信、单载波相干通信、多载波相干通信、时反技术、MIMO技术、纠错编码技术、水声通信网络协议等方面,但成果多为科研样机及湖试,与国际先进水平还存在较大差距。
1.2 水下电磁波通信
海水由于包含大量离子状态的元素而成为电的良性导体,因此电磁波在海水中衰减很快。与声学信号相似,电磁波频率越高,衰减愈严重,传播距离越短。甚低频电磁波(3~30 kHz)在海水中的传播距离最多仅约20 m;超低频电磁波(30~300 Hz)在海水中的传播距离最远也仅约100 m。基于甚低频/超低频电磁波,美国和俄罗斯均分别建立了岸基大规模(占地面积为平方千米级)、高功率(兆瓦级)的信号发射装置,可对数千公里外、水下几米到几十米的潜艇进行单行通信[35]。虽然电磁波在海水中传播距离较短,但它基本不受水文条件的影响、具有相当稳定的通信能力。因此也有基于高频电磁波(300 MHz~300 GHz,微波)的通信系统进行海面的中继通信,该系统在水下传输距离约为10 m,数据传输速率可达Mbit/s量级[36]。
2012年,Domigo[37]推导了水下磁感应通信的信道模型,标志着水下磁感应通信研究的开始。它以磁场为载体,通过改变磁场强度进行信息传输,在水体中的传输距离可达100 m,速率可达每秒兆比特量级,且隐蔽性极强。2015年,美国乔治亚理工大学的Akyildiz等、威奇托州立大学的Pu Wang以及纽约州立大学的Zhi Sun在实验室实现了水下磁感应通信,并对其性能和应用前景进行了评估[38]。上述水下电磁波通信成果或处于实验室研究阶段或直接服务于军方单位,尚无公开的商业产品。
1.3 水下光学通信
1963年,美国Sullivan等[39]发现海水在蓝绿光波段(波长为450~570 nm)存在低损耗窗口(比相邻频段低3~4个数量级)。而后基于此原理发展出了水下光学通信技术,并分为水下 LED 通信和水下激光通信:前者为非相干光,带宽范围窄,传输距离较近;后者为相干光,带宽可达兆赫兹量级,传输距离较远。蓝绿光作为一种电磁波,它在海水中的衰减依旧严重,目前的激光技术已实现纵向穿透约300 m海水的通信。
2008年,美国Hanson等[40]在实验室的研究表明:2 m的距离内,水下光学通信的传输速率可达到1 Gbit/s,有着巨大的应用潜力。2010年,美国伍兹霍尔海洋研究所的Farr等[39]在100 m的距离内实现传输速率达10~20 Mbit/s的水下光学通信。2016年,美国克莱姆森大学的Baghdady等[41]在模拟的海洋环境中实现相距2.96 m的传输速率达3 Gbit/s的水下光学通信;同年,阿卜杜拉国王科技大学Chao Shen等[42]利用紧凑、低功耗的水下光学通信系统实现了相距12 m的2 Gbit/s传输速率和相距20 m的1.5 Gbit/s传输速率。此外,英国Sonardyne公司研发的BLUECOMM系列水下光学通信产品可在海水中150 m的范围内进行传输速率高达10 Mbit/s的通信[43],见图2。

图2 BLUECOMM水下光学通信产品[43]Fig.2 BLUECOMM underwater optical communication product[43]
水下光学通信通常采用开关键控调制和脉冲位置调制,对光源功率和灵敏度以及接收器的灵敏度均有较高要求[44]。相较水下电磁波通信,水下光学通信受环境的影响较大(包括:光散射和背景光污染),且需要激光直线对准才能进行信息的传输,这就对目标间的相对位置关系提出了高精度的要求。
现阶段,美国已完成蓝绿激光水下通信技术在各种海洋条件和几乎全天候气象条件下的高速通信测试;俄罗斯、欧洲和日本也先后独立或同美国联合研制了机载以及星载激光通信系统;我国只是完成了150 m深的水下通信的可行性研究[45]。中国海洋大学搭建的水下光学通信系统在60 m距离内实现了视频的传输[46];2019年,中科院无线光电通信重点实验室徐正元团队[47]在60 m的距离内实现速率达2.5 Gbit/s的水下光学数据传输;清华大学、华中科技大学、上海光学精密机械研究所、浙江大学、桂林电子科技大学等其他科研单位也开展了水下光通信研究[39],但大多还处于仿真模拟和水槽实验验证阶段。
1.4 其他水下通信方法
除声波、甚低频/超低频电磁波和蓝绿激光等3种走向应用的通信手段外,近年来以中微子和引力波作为信号载体的通信思路也获得了高度的关注。
中微子是原子核内质子或中子发生衰变时产生的中性基本粒子,它的质量比电子的质量小近10个数量级。中微子不参与重力、电磁力以及质子和中子结合的强相互作用力,能沿直线以近光速度传播,具有极强穿透力。据学者估算:高能中微子束即使穿过整个地球,其能量衰减也不超过0.1%[12]。
引力波是物质震动所产生的引力场波动,它以光速进行传播。据学者预测,可被探测的引力波的频率大约位于7~10 Hz和10~11 Hz。虽然引力波较微弱,但任何物质都不能阻挡引力波的传播。试验表明:引力波在水体中穿过1 029 km时,其能量只衰减一半[12]。
未来,中微子探测器及振荡器研制成熟、引力波调制解调器研发出来后,将极大地降低海水环境的影响、丰富水下通信的方式,使水下任意位置、任意时间的通信成为可能。此外,蓬勃发展的量子通信技术也正在走入海洋,为未来实现水下通信的高保密性和高抗干扰性提供了可能。
2 水下导航技术
目前主要的水下导航技术有5种:自感应传感器导航、地图匹配导航、同步定位与地图创建(simultaneous localization and mapping,SLAM)导航、水声定位导航以及多航行器协作导航[48]。
自感应传感器导航主要指惯性导航,其原理是航迹推算,但它不仅需要绝对初始位置,且误差累计还会随时间迅速增大。地图匹配导航基于高精度地形、磁力图或重力图进行位置服务,为了使结果融入统一的时空框架,也需事先为用于匹配的地图赋予绝对的时空信息。SLAM技术利用传感器观测值构建环境信息地图,同时完成自身定位,但其结果也为相对位置。以上3种导航手段的作用范围均比较有限,且无法直接获得水下目标在全球统一时空框架内的位置信息。
由于声波信号能在海水中长距离传播[49],将其与北斗/GNSS联合建立局部的海洋大地基准,可为海洋设备提供绝对位置信息[50-51]。目前,水声定位导航已成为应用最为广泛的水下导航技术[52]。多航行器协作导航则是近年来发展的、综合了上述4种水下导航方法的技术[48,53-54],为水下航行器群落的协同作业服务,但它需要辅以声学导航提供的时空基准才能获得航行器的绝对位置,否则也只能提供航行器间的相对位置。
2.1 水下声学导航的分类
声波信号的波形带宽越宽,相同声源的谱级就越低,使得相同声源级条件下宽带信号的谱级低于单频信号、且更不易被监测[55]。因此,为保证声学测量的稳定性以及精度,水声导航技术的发展历程中通常没有考虑通信功能,而是直接利用声脉冲对水面以及水体中的设备进行定位。其基本原理是测量不同路径传播的声脉冲的时间或时间差,进而反演目标位置。根据基线的长短及工作模式的差别,一般可将水声定位技术分为长基线(long baseline,LBL)、短基线(short baseline,SBL)、超短基线(ultra short baseline,USBL)以及综合基线定位技术,对应的定位系统分别称为长基线定位系统、短基线定位系统、超短基线定位系统以及综合基线定位系统[56-60],见图3。

图3 水声定位系统[7]Fig.3 Acoustic positioning system[7]
长基线水声定位系统[61]将时空基准布设在海底,基准间距为几百米到几千米,甚至到几十千米的量级,测量目标声源到各基准的距离,交会确定目标的位置。长基线定位系统作业成本高,主要应用于局部区域的高精度定位工作。
短基线水声定位系统[62]将时空基准布设于海面平台的底部,基准间距一般为几米到几十米,利用目标的声信号到达海面平台各基准的时间差,解算目标的方位和距离。短基线定位系统只需在海面平台服役前进行设备安装即可,作业简易,但其精度受载体形变等因素的影响。
超短基线定位系统[60]将一个声学换能器和数个水听器集成为船载的声学基阵,以基阵的中心为参考点,形成一个时空基准,水听器间距一般为几个厘米到几十厘米,利用声信号到达各水听器的相位差确定目标方位与距离。超短基线定位系统尺寸小、使用方便,但其定位误差与距离相关,仅适用于局部作业区域的跟踪工作。
为充分发挥LBL、SBL和USBL定位系统的优势,达到取长补短的效果,组合式水声定位系统[63]应运而生,既包含海底基准,也包含船载基准,可提高定位精度、拓展应用范围。
上述水声定位系统既可采用同步信标工作方式,也可选用应答器工作方式[7]。同步信标工作方式要求在基准站和待测目标上均安装高精度的时钟同步系统,信标定时发射信号,获取信号单程传播时间,确定目标位置。对于应答器工作方式,长基线定位系统要求在待测目标上安装询问收发机,基准站上安装应答收发机,而短基线和超短基线定位系统的要求正好相反。在应答工作时,测量询问信号与应答信号的总传播时间,反演空间距离,确定目标位置。
2.2 水下声学导航的国外发展现状
自1950年代末起,经过60多年的发展,国外的水声定位技术已比较成熟,实现了水声定位系统的产品化、产业化和系列化[64-66]。国际上主要的水声定位系统的生产厂商有:法国iXblue、挪威Kongsberg、英国Sonardyne、德国Evologics、美国LinkQuest、挪威Imenco等[67]。
法国的iXblue公司研发了包括长基线和超短基线系统的多种产品。其中,超短基线产品主要为Gaps系列和Posidonia[68]。Gaps系列的工作频段20~30 kHz,最大作用距离可达4 km,绝对精度最高可达斜距的0.06%。Posidonia是长程超短基线系统,工作频段8~18 kHz,最大作用距离可达10 km,精度最高可达斜距的0.1%。该公司还推出了组建长基线系统的Ramses产品(声学收发器)和Canopus产品(声学应答器)[69],测距精度均优于0.01 m,最大工作深度可达6 km。其中,Ramses产品还能联合惯导系统进行紧组合导航,以提高特殊声学环境中的定位精度和鲁棒性。
挪威Kongsberg公司研发了便携式超短基线定位系统MICROPAP系列产品[70]以及长程超短基线定位系统HiPAP系列产品[71]。其中,HiPAP系列产品距离探测精度可达0.02 m,包括频带分为21~31 kHz和10~15 kHz的2类产品,它们的最远作用距离分别为5 km和10 km。目前,HiPAP系列产品已经由单纯的超短基线定位系统升级为综合定位系统,能够同时以长基线与超短基线2种模式工作。
英国Sonardyne公司针对水下声学定位研发了包括了长基线、超短基线以及组合定位系统[72-73]。Fusion LBL系列产品是该公司研发的长基线定位系统,测距精度优于0.015 m,可不受水深限制地提供目标厘米级精度的相对位置。Ranger2 USBL系列产品为该公司研发的超短基线系统,可根据工作频段分为19~34 kHz和14~19.5 kHz 2类,作用距离最大可达11 km,精度最高可达斜距的0.04%。同时,该公司还研发了综合长基线和超短基线的定位系统Marksman LUSBL,为深海钻探等活动提供高可靠性和鲁棒性的位置信息。该套系统在水深3 000 m处的阵列半径为525 m,目标跟踪的可重复性为0.39 m。
德国Evologics公司分别研发了超短基线定位系统和长基线定位系统的S2C R系列产品[74-75],最远作用距离均可达10 km。其中,超短基线定位系列产品的工作频率覆盖了7~78 kHz的多个频段,工作水深为200 m至10 km不等,标称斜距测量精度为0.01 m;长基线定位系列产品的工作频率覆盖了7~180 kHz的多个频段,工作水深为200 m~10 km不等,标称定位精度为0.015 m。Evologics公司产品的特色是将定位功能和通信功能进行了融合,无需进行定位模式和通信模式的切换。
美国LinkQuest公司研发了多款超短基线和长基线定位系统[76],但该公司主要为客户提供定制的产品,没有公开最新产品的详细信息。挪威Imenco公司研发的NASNet系统[77]是被动定位的长基线定位系统,定位目标不受数量限制。NASDriII USBL[78]则是该公司研发的超短基线定位系统,在3 500 m的工作范围内提供精度优于2.5 m的定位服务。该公司也研发了综合长基线与短基线的水下定位系统NASDrill RS925[79],以满足深水钻井船在水平方向700 m范围内动力定位的应用需求,其中短基线系统测距结果的重复测量标准差为斜距的0.15%,长基线系统在水深4 000 m条件下的定位标准差约为1 m。
2.3 水下声学导航的国内发展现状
我国由于人力、资金及市场需求的限制,进行水声定位技术研究的起步较晚,与国际顶级水平还有差距,工程项目中采用的相关产品大部分仍为国外引进。随着国家对该领域重视度的提升以及相关战略的实施,我国水声定位技术的研究单位不断增多,相应的技术进步十分迅速。1970年代,哈尔滨工程大学的杨士莪团队[80]研发了我国首套水声定位系统(长基线水声定位系统),为我国第一颗洲际导弹试验的准确落点提供了科学依据。伴随我国“十五”计划(2000~2005年)的实施,海洋资源的保护和开发得到了重视,水下声学定位技术亦得到了有力的促进和发展。期间,哈尔滨工程大学与自然资源部第一海洋研究所[81]联合研制了“长程超短基线定位系统”,2006年5月于中国南海的试验显示该系统的作用距离可达8 600 m,工作水深超过3 700 m,定位精度可达到斜距的0.2%~0.3%;杭州应用声学研究所与中国测绘科学研究院联合研制了“水下DGPS高精度定位系统”[82],2004年1月于浙江千岛湖的试验显示该系统在深约45 m的水域定位精度为5 cm,测深精度为30 cm,授时精度为0.2 ms。
目前,我国的水下定位技术取得了众多的成果,其中最具代表性的是哈尔滨工程大学孙大军团队等研制的多型超短基线和长基线定位系统,其研究的超短基线定位系统已在多条科考船上安装,研制的长基线定位系统也为各类潜器提供了水下高精度定位服务[55,83]。我国自主研发的水下综合定位系统(组合长基线和超短基线定位系统)也于2015年开始在“科学”号科考船上服役,试验表明该系统的定位精度优于0.5 m。此外,西北工业大学、国防科技大学、中国海洋大学、武汉大学、中国石油大学(华东)及山东大学等科研单位,中国石油东方地球物理勘探公司、中海油物探公司及中石化胜利油田地球物理勘探开发公司等生产单位,江苏中海达海洋信息技术有限公司、嘉兴声电子科技有限公司、青岛明深信息技术有限责任公司及中科院声学研究所嘉兴工程中心等商业公司目前均针对水下声学定位技术进行了深入研究。我国在水声定位领域起步较晚,但经过多年积累,已取得较大进展,总的发展历程如图4所示,声学定位系统的作用距离从8 000 m向12 000 m迈进,定位精度也从几十米量级向0.5 m提升,我国已从“跟跑”阶段逐渐进入“并跑”阶段[80]。

图4 水声定位系统发展历程[80]Fig.4 Development history of underwater acoustic positioning system[80]
3 水下通导一体化技术
3.1 水下通导一体化的内涵
近年来,随着智能时代的到来以及世界各国海洋战略的推进,海洋时空基准网、海洋环境监测网、海洋互联网、水下传感器网、水下机器人编队组网等各类水下网络的建设及其相关的技术得到了越来越多的关注和研究,期望在海洋内部建立无时不有、无处不在、无所不包、无所不能的泛在网络,全面实现对海洋的感知、建模、预测和控制[5-6,9]。然而,没有水下导航系统的支撑,就无法精确感知自身状态、海洋环境及两者间的关系;没有水下通信系统的支撑,就无法获取各类海洋设备产生的数据并对其进行远程控制。目前,针对特定任务(如:油气勘探、地震海啸预警、大洋钻探、区域环境监测等)分别发展起来的水下通信系统和水下导航系统均只能用于局部海域,无法满足海洋泛在网的建设需求。正在建设的海洋时空基准网是北斗/GNSS维持的全球性时空参考框架向海洋内部的延伸,将为水下的通信设备提供北斗/GNSS精准坐标位置和以北斗/GNSS时为准的精确时间同步,进而给水下通信系统赋予很强的时空位置服务功能。各个水下通信节点亦可反过来成为海洋时空基准网的静态或动态增强基站,构成水下时空参考框架相同精度级别的补充。未来利用海底固定和水体中移动的时空基准站与通信节点,可方便地进行海洋环境的层析,构建声速场等环境参数的精准模型,提供更为精准的通信和导航服务[84-85]。
水下通导一体化是实现水下通信系统与水下导航系统相互赋能的最优模式。目前,海洋环境中主要的通信和导航技术都是基于声波信号实现的,但两者却处于分离发展的状态。基于通信功能对通信速率的要求,声信号带宽越宽越好,即工作频率越高越好。故而,水下通信作业时,根据所需的传输距离选择合适的工作频段。然而,声波信号波形带宽越宽,相同声源的谱级越低,越不容易被监测。所以,对于水下声学导航技术,为了提高测距精度,大多采用了谱级和时间分辨率更高的脉冲信号或单频信号。因此,由于技术的限制,导致了目前水声通信和水声导航采用不同信号形式分离发展的情况。正如现代科学的产生,关键在于解剖分析;而当代系统科学的发展,又反过来要求整合集成[86]。在各类水下网络建设的刺激下,水下通信与水下导航整合集成的需求也逐渐增大。
3.2 水下通导一体化的发展
1995年,美国海军首先提出建设水下通信网络的思路,期望对水下设备进行命令、控制、通信及导航。1998-2008年,美国海军以海网计划(SeaWeb)名义,针对深度为50~300 m目标海域进行了水下网络的组网试验[87-88]。试验期间,网络的续航时间仅为90 d,支持350 Byte长度的数据包,传输速率为800 bit/s,节点间时间同步精度为0.1~1.0 s的量级,定位精度为100 m的量级。SeaWeb是水下通导一体化网络的雏形,但是由于技术的限制,直接用通信系统进行定位和授时的精度均过低,距海洋泛在网建设的需求有着相当大的距离。
伴随着民用水下声学调制解调器技术的发展,以多航行器协作组网为代表的水下传感器网络技术正逐渐打破声学通信系统直接用于水下导航的限制。近年来发展的网状长基线定位系统(Net-LBL)[89-91],见图5,以廉价的声学调制解调器代替专门的水声导航设备,利用测船、浮标以及无人船等设备搭建临时海面长基线时空基准,在进行数据传输的同时,基于卫星动态定位结果为水下人造设备提供导航服务。2014年,隶属北约科学和技术组织(NATO STO)的海洋研究和实验中心(CMRE)对研制的Net-LBL系统进行了首次海试,在浅海试验区内可将导航误差控制在60 m内[89]。他们的Net-LBL系统主要包括导航模块、数据收集/分发模块以及测距模块等3个组成部分。导航模块根据收集的信息计算水下设备的位置。数据收集/分发模块主要收集本地导航模块所需信息,并以声学方式分发其他节点的导航模块所需信息。测距模块利用收集的声信号发射与接收的时间戳,基于声速测量值计算2个节点间的距离并共享至其他模块。
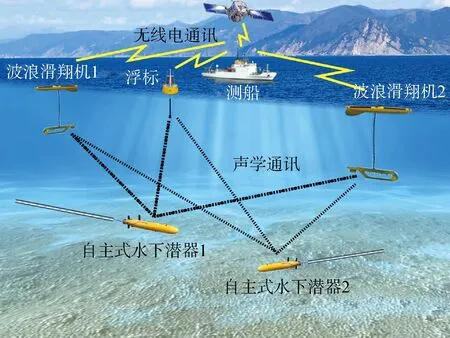
图5 Net-LBL定位系统[7]Fig.5 Net-LBL positioning system[7]
类似传统的水声导航系统,Net-LBL亦可分为同步和应答等2种工作模式。同步工作模式对各节点的时间同步能力提出了高精度的要求,需要增加原子钟等额外的设备实现精准时间同步,故该模式会增加系统成本和耗能;应答工作模式不需要进行严格的时间同步,所以被更广泛地应用,但该模式受应答延迟和节点运动的影响,导致节点间距的计算不够精确。美国海军太空与海战司令部(SPAWAR)下属海军信息战中心(NIWC)的研究人员,利用美国的芯片级原子钟(CSACs)及意大利Applicon s.e.l.公司的水下声学调制解调器(SeaModem),研制了同步工作模式的Net-LBL设备,并于2015年和2016年分别在西班牙和意大利的海域进行测试,结果表明由时间同步问题导致的测距误差仅为厘米级[89,92]。
2000年,德国的Konstantin Kebkal基于海豚通信机理的研究开发了扫频扩展载波(sweep spread carrier,S2C)技术专利,解决了多径干扰和信号谱级低于海洋环境噪声情况下进行解码的问题,使得利用同一种声学信号同时进行水下通信和导航成为可能。同年,Konstantin Kebkal创建Evologics公司。目前,该公司研发的S2C R系列水下长基线定位和超短基线定位产品在通信的同时完成定位,无需进行定位和通信模式转换,使得通信系统和导航系统集成在一起、相互补充;他们研发的水声调制解调器也被CMRE团队用于研发Net-LBL系统[89,93-94],见图6。该公司系列产品已被广泛应用于北约成员国科研人员的水声通导一体化研究中,因此可看作我国水下通导一体化设备发展的模板。目前,英国Sonardyne公司也已将旗下的Ranger系列产品升级为通信导航一体化的硬件设备。

图6 Evologics通导一体系列产品[75]Fig.6 Evologics integrated communication and navigation system product series [75]
3.3 水下通导一体化的趋势
伴随着海洋科学研究的深入、开发力度的增大以及各国海洋战略的推进,对海洋时空信息需求的不断增强。2015年,美国国防高级计划局(DARPA)发布了“深海导航定位系统”(positioning system for deep ocean navigation, POSYDON)项目公告,研究在海底布放声学基准站,组建类似GPS的定位系统[95-96]。2016年5月,英国贝宜系统公司获得DARPA的合同,2020年研发出“深海GPS系统”。该系统将部署大量的海底固定基站,像GPS卫星一样播发声学信号,为海洋内部设备提供高精度的导航定位服务。我国于“十三五”计划(2015年~2020年)开始由杨元喜院士主持开展“海洋大地测量基准与海洋导航新技术”研究,并在“十四五”计划(2020-2025年)、“问海计划”等支持下开展水下基准网络研究,期望建成水下全球定位系统“深海北斗”[3,10,97-100]。
目前,“深海GPS”和“深海北斗”的建设均聚焦于水下导航定位,且处于研究和布设的阶段。其中,基于海底声学基站的大地测量技术在海底板块监测方面取得了厘米级精度的定位成果[50-51,55],且在深海局部范围内(数十平方千米)的导航方面取得了米级精度的导航结果[55,85,101];基于潜标基站的声学浮标系统(Swallow、Sofar和Rafos等中性浮标)则在中尺度海流(直径数百千米)监测方面取得了数千米精度的定位成果[102]。然而,上述成果尚未形成通导一体化的成熟体系。对上述海洋通导系统的技术、系统、应用进行实例汇总,见表1。

表1 通导一体化实例汇总Table 1 Summary of integrated communication and navigation system
随着深海资源开发的深入和应用场景的拓展,上述水下全球定位系统必将与水下通信系统相互赋能,突破通导体制设计以及通导波形设计等技术瓶颈,融合成为通导一体化的水下基础设施。最后,通过海面平台的“信号接力”,与以北斗/GNSS为核心的全球性通导体系进行对接,服务于海洋精准建模、潜器集群协同、深海搜索救援等需求,真正地实现透明的智慧海洋,见图7。

图7 通导一体化海洋基准网[3]Fig.7 Marine reference network combined of communication and navigation[3]
目前,以美国为代表的北约组织国家已认识到水下通导一体化在军事、社会、商业及科学等领域的重要价值,开展了技术攻关和设备研发,并积极进行海试,积累了一些水下通导融合的技术成果。然而,他们的成果大多处于浅海试验阶段,且主要是针对水声技术的通导融合。因此,虽然我国现阶段水下通导一体化成果较少,但可发挥的空间较多,实现战略超车的可能性很大。借助我国“加快建设海洋强国”的战略规划和打造“深海北斗”的战略机遇,我们亟需加快针对水下通导一体化技术的研究,做到即要谋万世、谋全局,也争分夺秒、积跬步至千里[5]。
4 结论
1)水下通信的载体为声波、甚低频/超低频电磁波和蓝绿激光,其中声学通信是目前水下远程无线通信的主要方式;水声通信受水声信道复杂性的影响,其效果远弱于大气无线电通信效果;电磁波通信和光学通信在近距离有稳定高速的通信特征,可在短程范围内提供通信服务补充;未来可利用中微子和引力波通信构建不受海水影响的通信系统。
2)现阶段应用最为广泛的水下导航技术为水声导航,包括长基线、短基线、超短基线及综合基线定位技术;目前国外的商业公司已实现了水声定位系统的产品化、产业化和系列化,国内众多科研单位、生产单位及商业公司也在进行深入研究,并于关键技术指标实现了从“跟跑”到“并跑”的转变。
3)面对海洋泛在网的建设需求,需将独立发展的水下通信系统和水下导航系统相互赋能,进行一体化整合集成;以美国为首的北约组织积极试验通导一体化的浅海网络(SeaWeb计划、Net-LBL系统),其中基于S2C技术的系列产品是最具代表性的水下通导一体化硬件设备;目前中美日均在加速建设通导一体化的水下全球定位系统,虽然取得了厘米级精度的海底大地测量成果、米级精度的局部海域导航成果及千米级精度的中尺度海域定位成果,但尚未形成海洋通导一体化的成熟体系。
猜你喜欢
高技术通讯(2021年3期)2021-06-09
科学(2020年5期)2020-11-26
家庭影院技术(2020年6期)2020-07-27
家庭影院技术(2019年1期)2019-01-21
家庭影院技术(2018年11期)2019-01-21
家庭影院技术(2018年10期)2018-11-02
电子制作(2017年22期)2017-02-02
电子制作(2017年19期)2017-02-02
舰船电子对抗(2016年5期)2016-12-13
系统工程与电子技术(2016年7期)2016-08-21
