电控正流量挖掘机分阶段控制技术研究
2024-01-08 00:53魏森森杜常清徐玉兵
工程设计学报 2023年6期
魏森森,杜常清,,邹 斌,徐玉兵
(1. 武汉理工大学 汽车工程学院,湖北 武汉 430070;2. 武汉理工大学 现代汽车零部件技术湖北省重点实验室,湖北 武汉 430070)
液压挖掘机作为一种多功能的工程机械,因能在恶劣的环境中连续工作,被广泛应用于工程建设。自挖掘机问世以来,其工作效率不高一直是科研人员想攻坚的难题。现阶段,在挖掘机工作时,仅有不到一半的发动机输出功率转化为有用功,其余大部分在传递过程中以热能和势能的形式损失了[1-2]。
挖掘机在工作过程中主要通过液压油缸内液压油的体积变化来实现液压能与机械能之间的相互转化,故其液压系统主要以流量控制为主[3]。目前,国内外广泛应用的流量控制方式包括负载敏感控制、正流量控制和负流量控制,这3种流量控制方式的性能对比如表1所示[4]。在国内,大多数挖掘机采用负流量控制方式。虽然负流量控制在节能和稳定性方面表现优异,但是响应速度较慢。为此,本文对挖掘机的液压系统采用正流量控制方式[5]。

表1 不同流量控制方式的性能对比Table 1 Performance comparison of different flow control methods
除了液压系统的流量控制方式外,发动机的工作模式也是制约挖掘机工作效率的重要因素。目前,国内大部分挖掘机采用分工况控制方式[6]:将发动机的工作模式分为重负荷模式、标准模式和普通模式,每种工作模式下设有多个挡位供驾驶员选择[7]。刘顺安等人[8]采用分工况转速感应控制来调节变量泵的排量,以稳定挖掘机中发动机的转速;何清华等人[9]提出将变功率和恒功率控制策略相结合,实现了发动机-变量泵-负载的功率匹配。但是,上述方法忽略了2个重要问题[10]:1)分工况控制要求驾驶员有一定的操作经验,能够根据实际情况合理地选择发动机的工作模式;2)忽略了挖掘机在执行不同动作时所需的功率是变化的[11]。高宇等人[12]虽在此基础上提出了挖掘机的分阶段控制方式,但未涉及如何识别挖掘机的不同作业阶段。
基于挖掘机负流量控制和分工况控制的不足[13],笔者以某企业生产的正流量挖掘机为研究对象,采用分阶段控制方式,基于AMESim和Simulink软件搭建该挖掘机的联合仿真模型,并通过联合仿真和实车实验来验证所提出的控制策略的有效性。
1 电控正流量挖掘机分阶段控制的特点
1.1 电控正流量液压系统特点
正流量控制的特点是“所供即所需”,即变量泵的排量正好是执行机构需要的[14]。为满足这一特性,正流量挖掘机通常要配备电控手柄,控制器对电控手柄传来的信号进行处理后输出控制信号,分别用于控制多路阀的开关和变量泵排量的调节。本文电控正流量挖掘机的控制原理如图1所示。
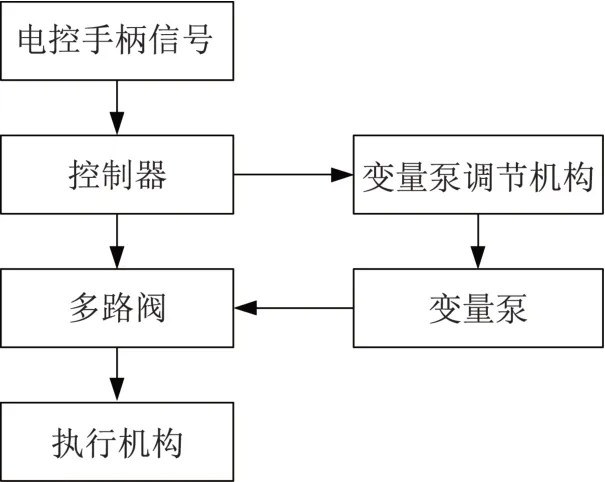
图1 电控正流量挖掘机控制原理Fig.1 Control principle of electronically controlled pos‐itive flow excavator
1.2 分阶段控制功率需求
挖掘机的作业环境通常比较恶劣,因此其实时工况非常复杂。为了降低负载波动对发动机的影响[15],本文将挖掘机的一个作业循环分为不同阶段,并以此为基础来控制发动机的转速。挖掘机的一个完整作业循环可分为4个阶段:挖掘阶段、满载返回阶段、卸载阶段和空载返回阶段。挖掘机在不同作业阶段的功率需求如图2所示。
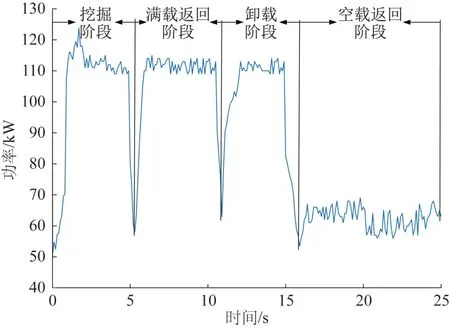
图2 挖掘机不同作业阶段的功率需求Fig.2 Power demand of excavator at different working stages
1)挖掘阶段。挖掘是一个作业循环的开始,驾驶员通过操纵电控手柄来使铲斗系统工作,以使铲斗内装满待装填的物料。由于挖掘阶段要克服较大的挖掘阻力,因此需要发动机提供较大的功率[16]。
2)满载返回阶段。挖掘机在满载返回阶段主要执行动臂、斗杆的提升和回转动作,以将挖掘的物料转移至目标地点。满载返回阶段无需克服挖掘阻力,但要求液压系统响应快速,因此要提高发动机的转速,以增大变量泵的排量[17]。
3)卸载阶段。挖掘机卸载时,其铲斗执行机构和斗杆执行机构交替工作,需要发动机提供较大的功率,以保证挖掘机的卸载动作能够快速完成。
4)空载返回阶段。挖掘机在空载返回阶段要执行的动作较多,铲斗、斗杆、动臂等的执行机构均单独动作,目的是使铲斗移动至下一个挖掘点[18]。挖掘机在空载返回阶段只需克服重力做功,故所需的功率不大,但仍要提高发动机的转速,以使挖掘机各个动作响应更快[19]。
1.3 发动机特性
本文所研究的挖掘机选用的发动机为柴油机。由于柴油机的工况复杂多变,难以建立精确的数学模型来描述其工作机理,因此本文借助图3所示的柴油机万有特性曲线来开展相关研究。
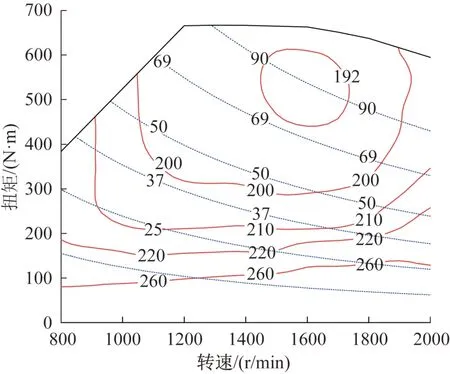
图3 柴油机的万有特性曲线Fig.3 Universal characteristic curve of diesel engine
从图3中可以看出,柴油机的经济油耗区对应的转速区间为1 500~1 750 r/min。根据挖掘机分阶段控制的功率需求,柴油机的转速宜控制在1 500~1 750 r/min内,这样能保证柴油机既满足挖掘机不同作业阶段的功率需求,又能始终在经济油耗区内工作。
2 电控正流量挖掘机液压系统建模
本文利用AMESim软件来搭建电控正流量挖掘机液压系统模型。AMESim软件提供了丰富的元件库和联合仿真接口,对于具有特殊作用的液压元件,如三位六通换向阀、闭锁阀等,可直接利用液压元件设计库进行封装设计。
2.1 三位六通换向阀模型
为减少液压油传递过程中的管道压力损失以及简化液压油路,本文设计封装了多个三位六通换向阀,其原理如图4 所示[4]。其中,三位六通换向阀的A、B 口分别与挖掘机执行机构的无杆腔和有杆腔相连,D、P 口连接变量泵,T 口与回油油路相连,C 口与下一个三位六通换向阀的P 口相连。当三位六通换向阀处于中位时,D口与变量泵直接相连,液压油通过回油油路回到油箱;当三位六通换向阀受到先导压力时,其阀芯产生位移,此时换向阀根据阀口开度分配流向不同执行机构的流量[20]。

图4 三位六通换向阀原理Fig.4 Principle of three-position six-way directional valve
2.2 发动机-双泵模型
为了提高挖掘机执行机构的运行速度,执行机构由2个变量泵同时供油,变量泵直接由发动机驱动。控制器根据电控手柄的信号确定变量泵的排量,并将变量泵排量的控制信号传输至变量泵调节机构,以实现变量泵排量的调节。电控正流量液压系统的发动机-双泵模型如图5所示。
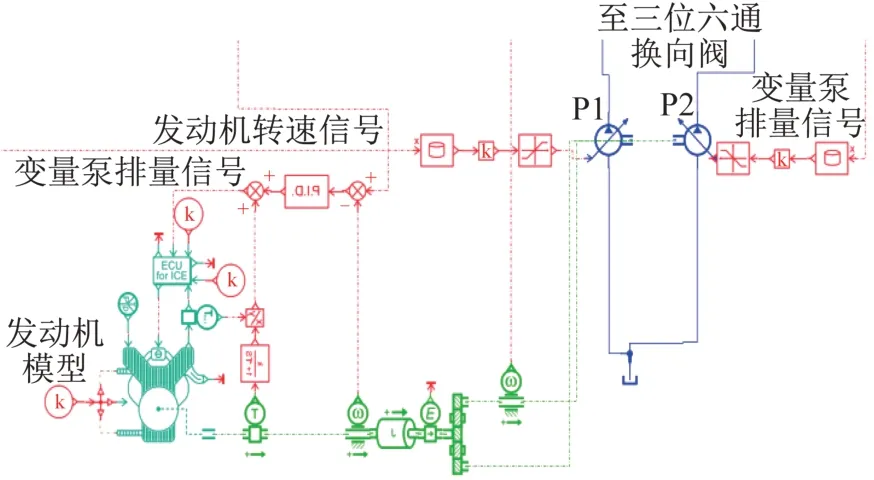
图5 发动机-双泵模型Fig.5 Engine-dual pump model
2.3 电控正流量液压系统模型
根据电控正流量挖掘机液压系统的原理,利用AMESim软件中的液压库和机械库建立电控正流量液压系统模型,如图6所示。其中,挖掘机的动臂、斗杆和铲斗执行机构的参数设置如表2所示;液压油的相关参数均采用默认值。
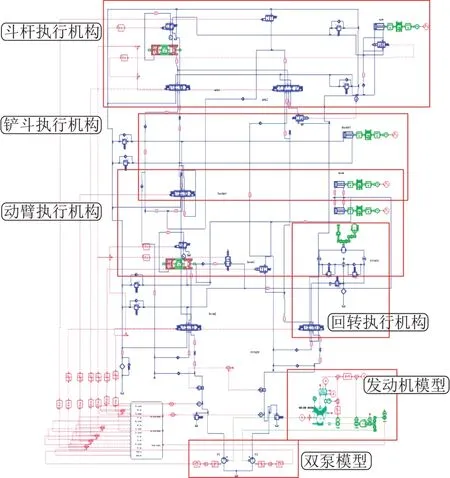
图6 电控正流量挖掘机液压系统模型Fig.6 Hydraulic system model of electronically controlled positive flow excavator
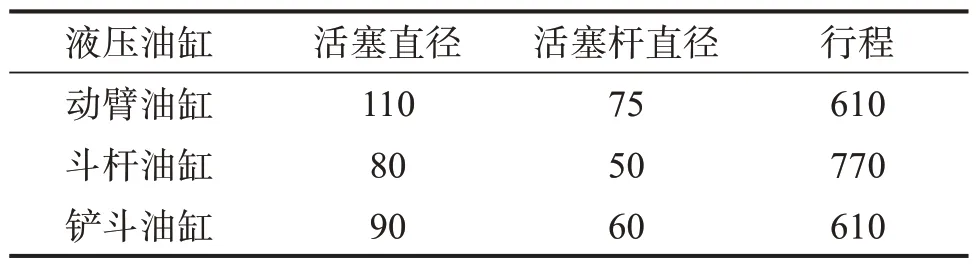
表2 挖掘机各执行机构参数设置Table 2 Parameter setting for each actuator of excavator 单位:mm
3 电控正流量挖掘机控制系统建模
Simulink 是MATLAB 软件中的可视化仿真工具[21],被广泛应用于控制器的设计和嵌入式开发等。本文在MATLAB/Simulink环境中构建电控正流量挖掘机控制系统模型,并联合AMESim软件进行仿真验证。
本文电控正流量挖掘机的控制系统采用分层控制策略:上层控制器通过电控手柄信号判断挖掘机各执行机构的流量需求和状态,以判定挖掘机所处的作业阶段,从而确定发动机的基速;下层控制器接收来自上层控制器的发动机基速,并同步采集主供油泵的压力信号,通过模糊控制对发动机的转速进行修正,以得到发动机的期望转速。电控正流量挖掘机的分层控制流程如图7所示。

图7 电控正流量挖掘机分层控制流程Fig.7 Hierarchical control flow of electronically controlled positive flow excavator
3.1 上层控制器设计
3.1.1 电控手柄信号滤波处理
挖掘机在工作过程中产生的抖动可能会使驾驶员无意识地操作电控手柄。为了保证挖掘机能够平稳地工作,采用基于卡尔曼滤波器的PID(propor‐tional-integral-derivative,比例-积分-微分)控制算法[22],以准确地追踪电控手柄的信号。该算法的控制原理和控制模型分别如图8和图9所示。

图8 基于卡尔曼滤波器的PID控制原理Fig.8 PID control principle based on Kalman filter

图9 基于卡尔曼滤波器的PID控制模型Fig.9 PID control model based on Kalman filter
本文电控手柄的信号仅有一个维度且呈周期性变化,由于在传递过程中受到干扰和噪声的作用,电控手柄信号Xk的递推过程如下:
式中:ωk为随机干扰,Yk为经PID控制算法处理后的电控手柄信号,εk为随机观测噪声,Ck为变化的系数,k为时刻。
卡尔曼滤波的原理为:将传感器的测量值与卡尔曼滤波模型的观测值融合,以获得准确的电控手柄信号Xk作为上层控制器的输入信号。具体递推公式如下:
3.1.2 执行机构状态判断
在上层控制器中,先根据钥匙状态来判断挖掘机中发动机的工作状态;若发动机处于工作状态,则控制器根据电控手柄的信号判断执行机构的状态,进而判断挖掘机所处的作业阶段,由此确定发动机的基速并传递给下层控制器。图10和图11所示分别为发动机工作状态的切换逻辑及挖掘机执行机构状态的判断逻辑。

图10 发动机工作状态判断逻辑Fig.10 Judgmental logic of working state of engine
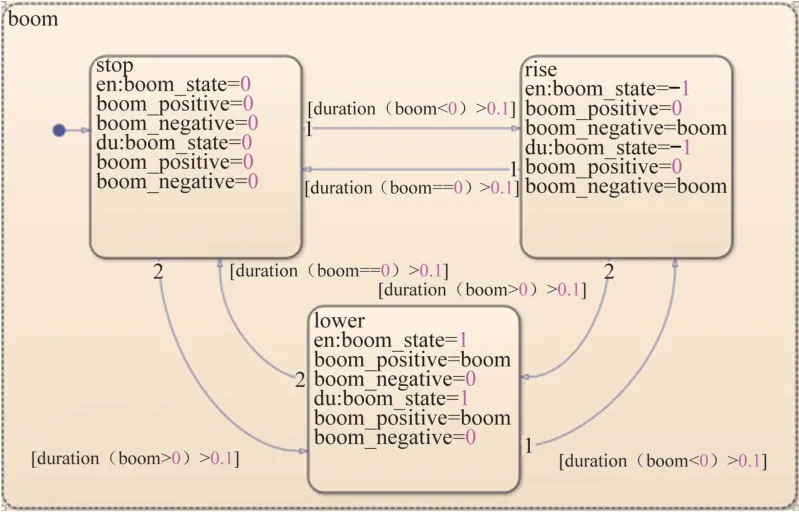
图11 挖掘机执行机构状态判断逻辑Fig.11 Judgmental logic of state of excavator actuator
3.2 下层控制器设计
3.2.1 发动机期望转速计算
当下层控制器接收到上层控制器的输出信号后,利用模糊控制算法来修正发动机的转速。由于挖掘机处于不同作业阶段时,其主供油泵的压力存在明显区别,因此以主供油泵压力p和主供油泵压力变化率e作为模糊控制器的输入,发动机转速增量Δr作为输出。定义模糊子集为{NB,NM,NS,ZO,PS,PM,PB},分别表示输入p、e和输出Δr的值为负大、负中、负小、零、正小、正中、正大;输入、输出均选用三角形隶属度函数。相较于文献[6]提出的仅采用主供油泵压力来判断挖掘机的作业阶段,本文方法更加可靠。当挖掘机处于挖掘阶段时,其所受的负载变大,此时主供油泵压力p为PB,主供油泵压力变化率e为PB,说明此时挖掘机所需的功率较大,则输出发动机转速增量Δr为NB,即增大挖掘机的输出功率。同理,可得到挖掘机处于其他作业阶段时发动机转速的模糊控制规则,具体如表3所示。
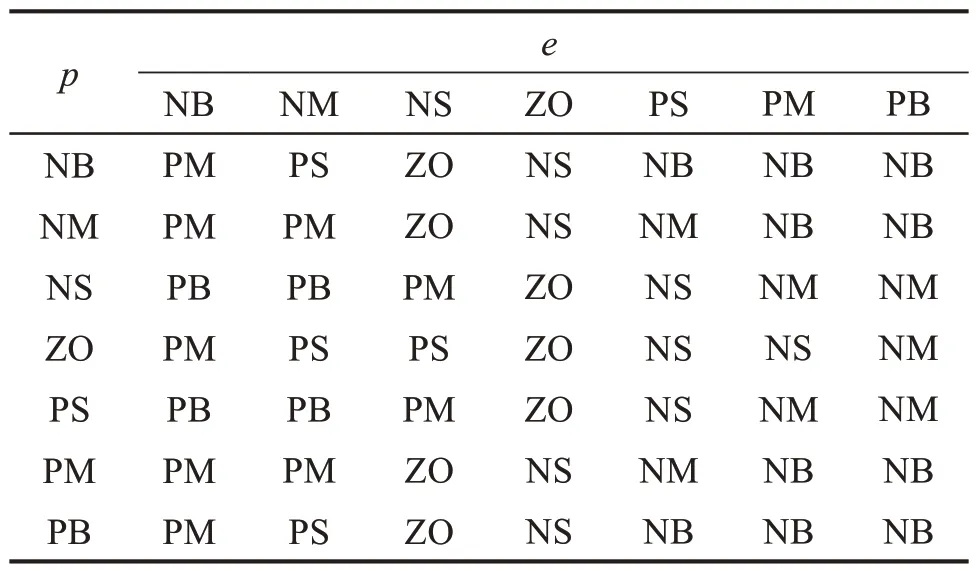
表3 发动机转速的模糊控制规则Table 3 Fuzzy control rule for engine speed
根据模糊控制器的输出,可得发动机的期望转速re:
式中:r0为发动机的基速,来自上层控制器。
3.2.2 发动机转速控制
在挖掘机分阶段控制的研究中,发动机的转速控制十分重要[23]。传统的挖掘机一般采用PID 控制来稳定发动机的转速,但基于PID控制的转速调节具有一定的滞后性且超调量较大,故本文采用滑模PID 控制算法来稳定发动机的转速。这种综合控制方式既能快速稳定发动机的转速,又可在一定程度上消除PID控制调节转速的弊端。
当发动机的实际转速与期望转速的差值大于切换阈值时,采用滑模控制算法来稳定发动机的转速,此时须建立发动机及其调速系统的数学模型。本文发动机数学模型采用一阶滞后模型,其调速系统的数学模型采用二阶模型[24],分别表示为:
式中:T、Z分别为发动机的滞后时间和系统增益,T1为发动机加速度时间常数,T2、m、n为与发动机调速系统执行线圈的时间常数有关的待定系数。
选取发动机节气门位置W、位置误差E和位置误差的一阶导数̇为状态变量,基于式(9)和式(10)构建发动机工作时的状态空间方程:
其中:
式中:X为发动机的状态变量,a0、a1、a2、b为常数。
将切换函数S设计为:
式中:D为系数,D=0.1。
为了使发动机的转速能沿滑模面快速向期望转速趋近,采用比例切换函数设计相应的输入U,如式(13)所示,并以此为基础搭建发动机的滑模控制模型,如图12所示。
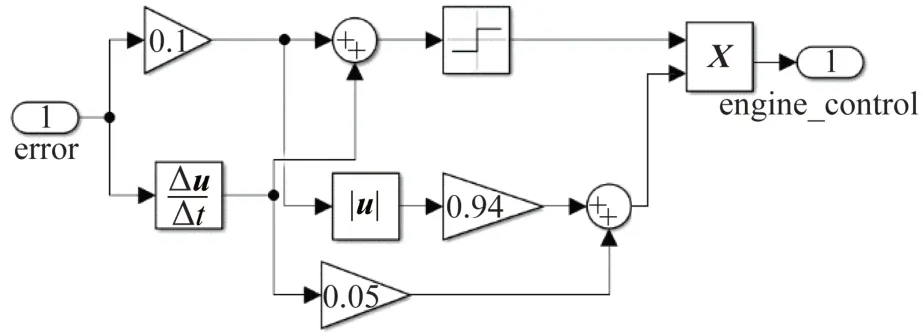
图12 发动机滑模控制模型Fig.12 Sliding mode control model of engine
式中:α、β为系数,α=0.94、β=0.05。
当发动机的实际转速与期望转速的差值小于切换阈值时,采用PID控制来稳定发动机的转速,直接用PID 控制模块代替滑模控制模块即可,其中PID控制参数设置如下:Kp=1.64,Ki=0.2,Kd=0.03。
3.2.3 主、副阀流量分配
本文电控正流量挖掘机的液压系统采用双变量泵供油。其中,主供油泵与主三位六通换向阀相连,副供油泵与副三位六通换向阀相连,2 个变量泵同时为挖掘机的执行机构供油。当不同的执行机构动作时,执行不同的供油规则,如表4所示。

表4 挖掘机变量泵的供油规则Table 4 Oil supply rules for variable pump in excavator
当确定挖掘机执行机构的流量需求后,在变量泵的作用下,液压油经过三位六通换向阀流入执行机构的液压油缸。为了确定三位六通换向阀的阀芯开度,须对需求流量进行分配。主、副阀的流量分配控制策略如图13所示。

图13 主、副三位六通换向阀流量分配控制策略Fig.13 Flow distribution control strategy of master and aux‐iliary three-position six-way directional valve
确定了主、副三位六通换向阀的流量后,需要进一步计算其阀芯的开度。三位六通换向阀阀口的流量特性如下:
式中:c为流量系数;ρ为液压油密度;A为阀口开度面积;L为流经阀口的流量,即相应执行机构所需的流量;Δp为流过控制阀前后液压油的压力差。
4 电控正流量挖掘机仿真分析
4.1 联合仿真接口构建
完成电控正流量挖掘机液压系统和控制系统建模后,搭建联合仿真模型,以验证所采用控制策略的有效性,具体流程如下。
1)在AMESim 软件中创建SimuCoSim 接口,完成挖掘机液压系统建模后,在进行联合仿真时该接口会生成一个mex64文件。
2)在Simulink 软件中创建AME2SLCoSim 接口并读取mex64文件,完成联合仿真接口配置。
在联合仿真时,AMESim软件将变量泵出口压力和发动机转速信号传递至Simulink软件;Simulink软件将变量泵排量和三位六通换向阀的阀芯开度信号传递至AMESim 软件。图14 和图15 分别为挖掘机联合仿真的Simulink接口和AMESim接口。

图14 挖掘机联合仿真的Simulink接口Fig.14 Simulink interface for co-simulation of excavator
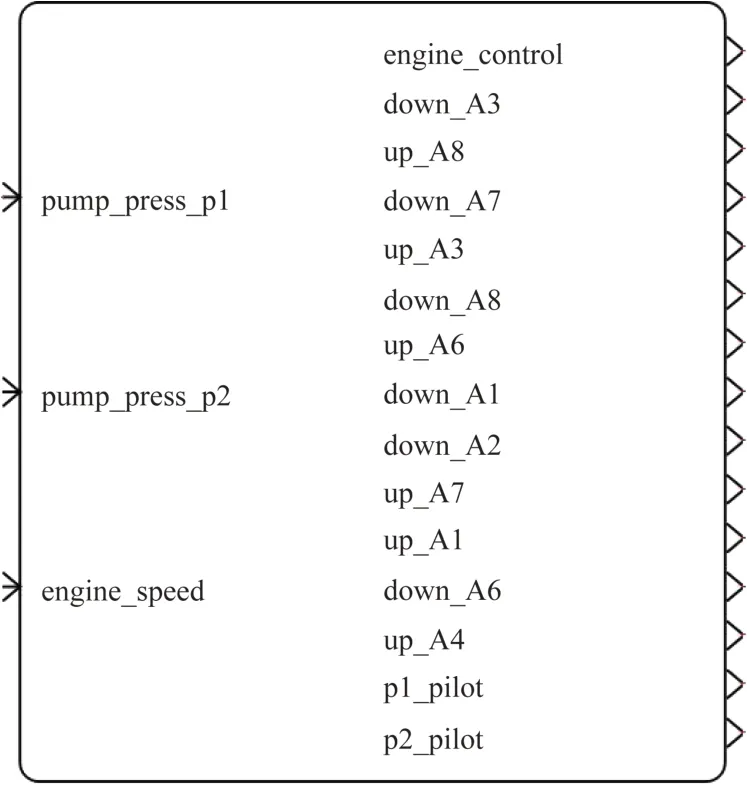
图15 挖掘机联合仿真的AMESim接口Fig.15 AMESim interface for co-simulation of excavator
挖掘机在工作时大多以单动作为主,少量场景下会使用复合动作。在联合仿真时,通过改变变量泵压力和发动机转速来观察挖掘机执行机构的响应情况。
4.2 挖掘机单动作仿真分析
挖掘机的铲斗、动臂和斗杆均可进行正反2个方向的运动。本文选择功率需求最大的铲斗内收动作进行仿真分析。挖掘机在执行铲斗内收动作时,发动机转速和铲斗油缸压力的仿真曲线分别如图16和图17所示。由图可知,在仿真开始阶段,电控手柄不动作,此时发动机以1 700 r/min 的转速运行,铲斗油缸的压力基本为0 Pa。当t=1 s时,在先导压力的作用下,三位六通换向阀的阀芯产生位移,液压油在变量泵的作用下经过油路进入铲斗油缸,此时铲斗油缸无杆腔和有杆腔的压力急速上升,发动机的转速也因负载波动而产生突变。当t=1.8 s左右时,铲斗油缸有杆腔和无杆腔的压力达到最大,说明铲斗开始动作。当t=2.2 s左右时,发动机转速稳定在1 600 r/min,由此验证了滑模PID 控制算法的有效性。
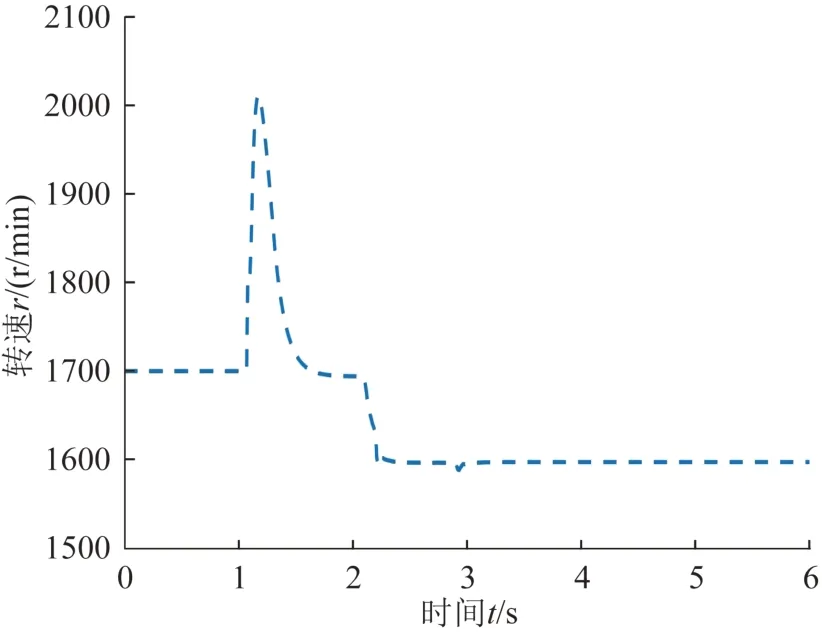
图16 铲斗动作时发动机转速的仿真曲线Fig.16 Simulation curve of engine speed during bucket action

图17 铲斗油缸压力仿真曲线Fig.17 Simulation curve of bucket cylinder pressure
4.3 挖掘机复合动作仿真分析
在挖掘机的实际操纵中,最常见的复合动作为动臂和斗杆同时动作。选取动臂提升和斗杆外伸这一复合动作进行仿真分析。挖掘机在同时执行动臂提升和斗杆外伸时,发动机的转速、动臂油缸压力和斗杆油缸压力的仿真曲线分别如图18 至图20 所示。由图可知,在仿真开始阶段,电控手柄不动作,动臂油缸和斗杆油缸的压力基本为0 Pa,发动机以1 700 r/min的转速运行。当t=1 s时,在先导压力的作用下,三位六通换向阀的阀芯产生位移,液压油在变量泵的作用下经过油路进入动臂油缸和斗杆油缸,此时动臂油缸和斗杆油缸的无杆腔和有杆腔的压力均急速上升,发动机转速因负载波动而产生突变;最终发动机的转速稳定在1 700 r/min左右。对比图17、图19 和图20 可知,动臂油缸和斗杆油缸的压力明显小于铲斗油缸的压力,说明挖掘机在执行复合动作时,变量泵排出的流量同时流向动臂油缸和斗杆油缸,导致其压力较执行单动作时小,进而影响执行机构的响应速度,该仿真结果符合预期。
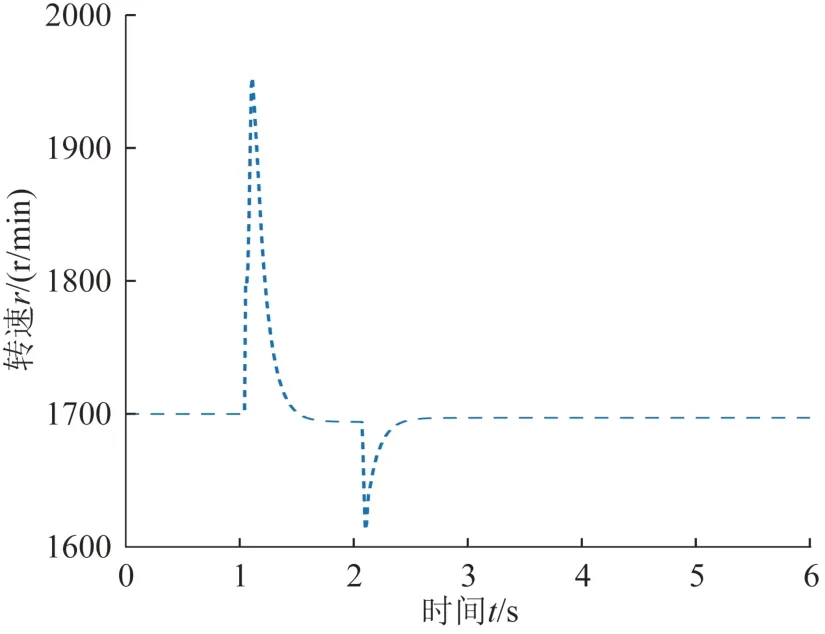
图18 动臂、斗杆动作时发动机转速的仿真曲线Fig.18 Simulation curve of engine speed during action of boom and stick
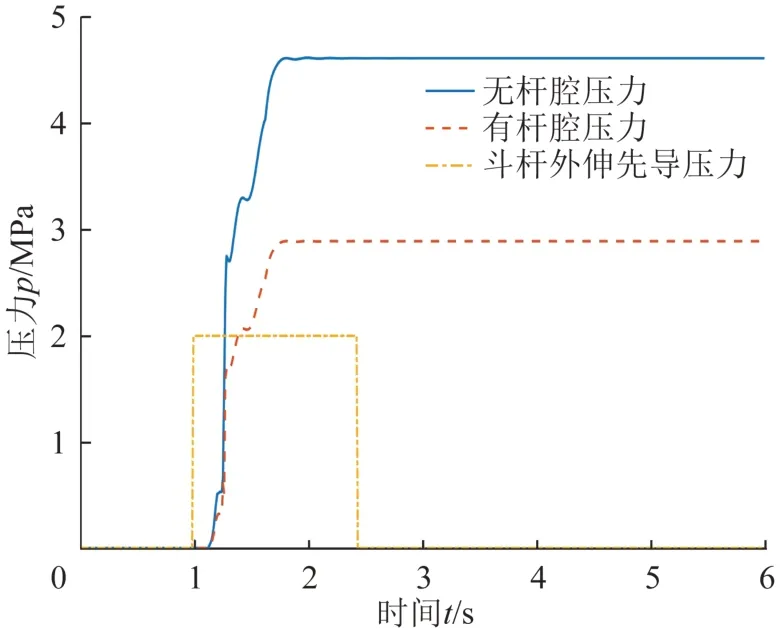
图19 斗杆油缸压力仿真曲线Fig.19 Simulation curve of stick cylinder pressure
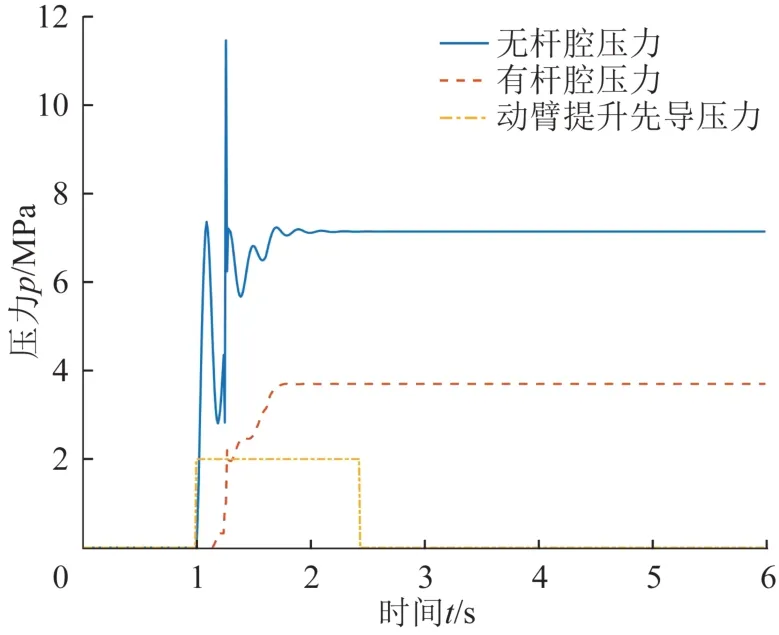
图20 动臂油缸压力仿真曲线Fig.20 Simulation curve of boom cylinder pressure
4.4 挖掘机油耗仿真分析
本文的电控正流量挖掘机采用分阶段控制方式。为了验证该控制方式的优越性,以分工况控制方式为对比,通过联合仿真比较2种控制方式下发动机的油耗情况。在AMESim软件中,将发动机转速设为固定值,即可将分阶段控制转换为分工况控制。在2种控制方式下,挖掘机均完成一个完整的作业循环。不同控制方式下发动机的油耗对比如图21所示。
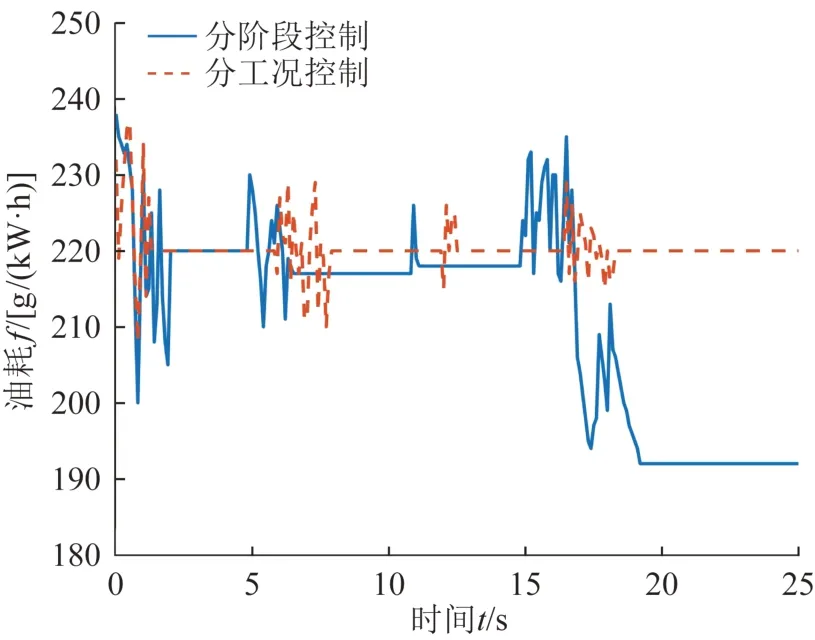
图21 不同控制方式下发动机的油耗对比Fig.21 Comparison of engine fuel consumption under different control methods
从图21中可以看出,在一个作业循环内,当挖掘机采用分阶段控制时,发动机在不同作业阶段的油耗存在明显变化,尤其是空载返回阶段,该阶段的油耗为192 g/(kW·h)左右;当采用分工况控制时,发动机的油耗始终为220 g/(kW·h)左右,与分阶段控制相比,空载返回阶段的能量浪费严重。综上,对于正流量挖掘机而言,分阶段控制优于分工况控制。
5 电控正流量挖掘机实验研究
5.1 实验设备
通过联合仿真验证了电控正流量挖掘机分阶段控制策略的有效性,但是任何模型的仿真结果均与实际结果存在一定误差。因此,开展实车验证是十分有必要的。图22所示为实车验证时所采用的挖掘机机型。

图22 挖掘机实验机型Fig.22 Experimental excavator model
5.2 实车实验
在实车实验中,挖掘机无论是采用分阶段控制还是采用分工况控制,在挖掘开始前铲斗均已转移到挖掘点,通过操纵电控手柄完成一个完整的作业循环。基本流程如下:在0—5 s阶段,挖掘机的铲斗完成挖掘动作;在5—11 s阶段,铲斗完成从挖掘点到卸载点的转移;在11—15 s阶段,挖掘机完成卸载;在15—25 s 阶段,铲斗返回至新的挖掘点,准备开始下一个作业循环。在分阶段控制下挖掘机的发动机转速、主供油泵出口压力以及主供油泵出口流量的实测曲线分别如图23 至图25 所示。分阶段和分工况控制下挖掘机发动机的工作点分布分别如图26和图27所示。

图23 分阶段控制下发动机转速的实测曲线Fig.23 Measured curve of engine speed under phased control
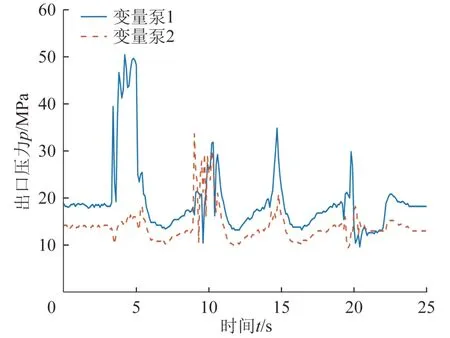
图24 分阶段控制下主供油泵出口压力实测曲线Fig.24 Measured curve of main oil feed pump outlet pressure under phased control

图25 分阶段控制下主供油泵出口流量实测曲线Fig.25 Measured curve of main oil feed pump outlet flow under phased control

图26 分阶段控制下发动机工作点分布Fig.26 Distribution of engine operating points under phased control
从图23中可以看出,当挖掘机采用分阶段控制时,发动机在不同作业阶段的实际转速均能稳定在期望转速附近,进一步验证了所采用的滑模PID控制算法的有效性。此外,发动机转速和主供油泵压力的变化均符合挖掘机在一个作业循环内的负载变化规律:在挖掘阶段和卸载阶段功率需求较大,主供油泵压力较大,发动机转速较低;其他作业阶段功率需求较小,主供油泵压力较小,发动机转速较高。对比图26 和图27 可知,在分阶段控制下,发动机在一个作业循环内的大多数工作点均在经济油耗区,而分工况控制下发动机仅有小部分工作点在经济油耗区内。由此可知,采用分阶段控制时发动机的工作点分布更加合理,能量利用率更高。
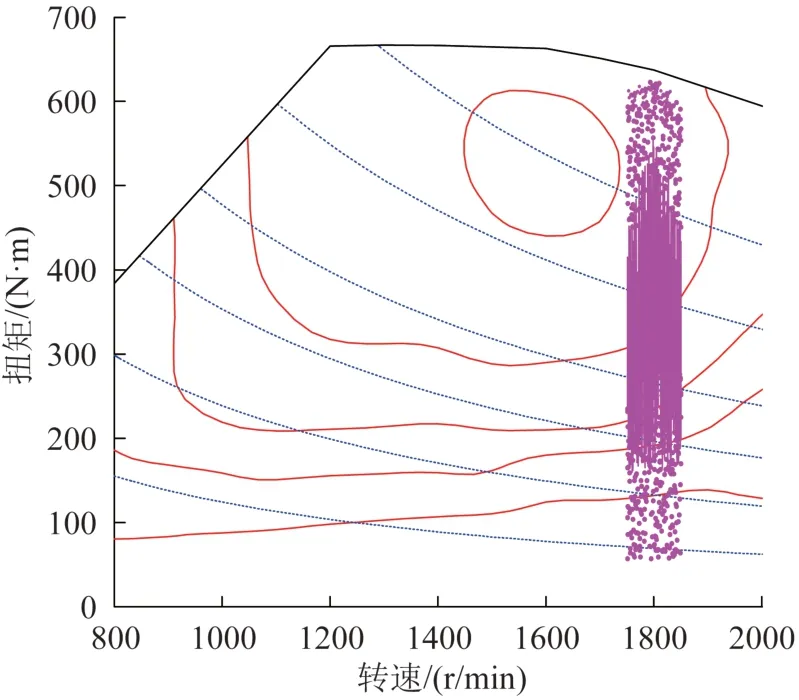
图27 分工况控制下发动机工作点分布Fig.27 Distribution of engine operating points under control by different working conditions
6 结 论
本文以某电控正流量挖掘机为研究对象,提出了一种分阶段控制策略。将挖掘机的一个作业循环分为4个阶段:挖掘阶段、满载返回阶段、卸载阶段和空载返回阶段。同时,基于AMESim与Simulink软件建立了电控正流量挖掘机液压系统和控制系统的仿真模型,通过联合仿真验证了所提出的分阶段控制策略的有效性。最后,通过实车实验证明,挖掘机处于不同作业阶段时的功率需求不同,采用分阶段控制可以及时调整发动机的转速,改善了发动机工作点的分布并降低了发动机的油耗。
猜你喜欢
天然气与石油(2022年5期)2022-11-01
天然气与石油(2022年4期)2022-09-21
机械设计与制造(2022年7期)2022-07-27
机械工程师(2020年5期)2020-06-19
成组技术与生产现代化(2019年3期)2020-01-14
建筑机械化(2018年6期)2018-06-29
猪业科学(2018年4期)2018-05-19
疯狂英语·新策略(2017年7期)2018-01-03
中国卫生标准管理(2015年16期)2016-01-20
散文百家(2014年11期)2014-08-21