集成电路技术在拖拉机系统优化中的应用研究
2024-01-09 09:46张萃珍
农机化研究 2024年4期
张萃珍,王 娟
(江西机电职业技术学院,南昌 330013)
0 引言
拖拉机是农业种植生产机械的主要动力源,可挂载不同的农机具实现耕种和收获等多种生产过程,在精准化农业生产过程中具有重要作用[1]。拖拉机要面对多种复杂的农业生产环境,且农业机械设备操作人员技能水平差异性较大,这些因素均会对拖拉机的使用工况造成影响[2]。拖拉机自动驾驶技术能够有效提升作业过程中的精准度,降低生产过程中出现的漏作业和重复作业现象,改善农业生产中的机械化耕作效率,且能够将操作者进行解放出来,从而提高农业生产中的自动化程度[3-5]。拖拉机导航控制模块较多,导航控制终端作为拖拉机导航控制的中枢系统,是实现农业拖拉机自动驾驶的关键技术[6]。为此,基于导航控制终端,将拖拉机导航模块数据进行集中处理与分析,以改善农业拖拉机的使用效率。
1 拖拉机导航控制系统总体设计
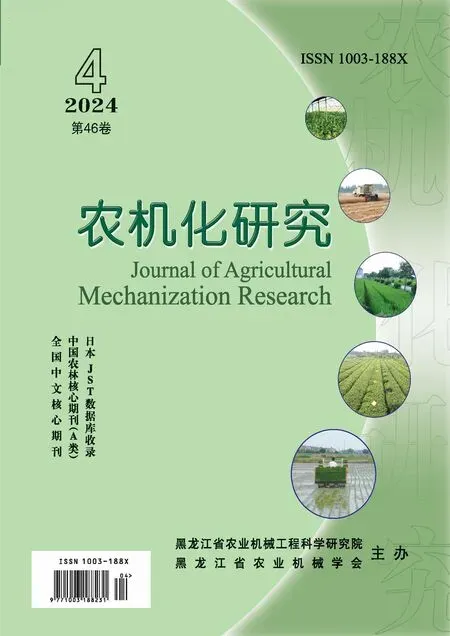
拖拉机导航控制系统模块包含转向控制、提升以及导航终端3个不同的功能模块。其中,转向控制模块主要用于对导航过程中的GPS定位和前轮转向角度等数据信息进行采集分析,导航算法能够根据转向控制模块数据进行路径信息的分析计算,同时生成下一时刻的目标点坐标信息,采用脉冲控制的方式驱动步进电机,从而带动导航控制模块中的转向机构进行动作。转向控制模块主要包含转向器和换向阀等执行机构[7]。导航控制终端是导航控制系统的中枢系统,可用于对拖拉机作业过程中的人机交互和作业传感数据采集分析、通信及存储,更重要的是可用于进行农用拖拉机的作业路径规划[8]。图1为农用拖拉机导航控制系统结构框图。
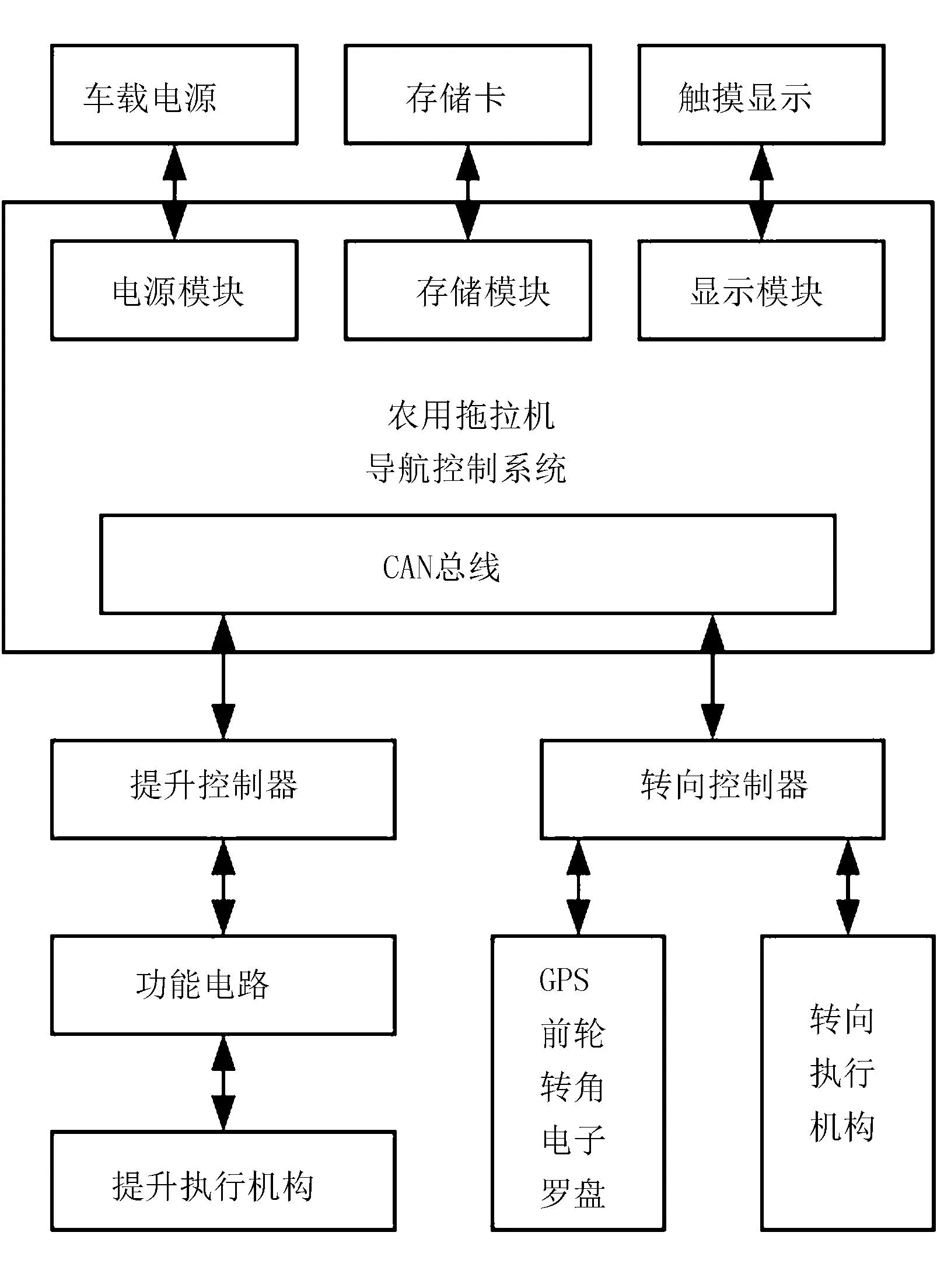
图1 农用拖拉机导航控制系统结构框图Fig.1 Structure block diagram of agricultural tractor navigation control system
导航控制终端采用CAN总线通信的方式进行数据交互,获取导航控制模块当中的位置信息数据和执行机构动作数据,同时能够对运行过程中各种信息数据进行分析和保存,将各种状态信息数据进行实时显示,根据位置信息数据进行作业路径规划[9]。CAN总线要求具有实时数据交互功能,能够在拖拉机运行过程中进行通信数据的有效传输,并将数据信息与图形进行有效处理,保证数据交互过程中的实时性;导航控制终端在作业过程中要求能够有效抵抗外界环境的干扰,保证导航控制终端能够在不同的环境条件下正常工作[10]。
2 拖拉机导航控制系统硬件设计
拖拉机导航控制终端硬件电路主要包含最小工作系统、扩展电路以及通信电路,如图2所示。

图2 导航控制系统终端硬件结构图Fig.2 Hardware structure diagram of navigation control system terminal
其中,最小工作系统包含电源、时钟、复位以及微处理器等功能模块,扩展电路主要包含显示、存储以及人机交互等电路,通信接口电路包含CAN总线接口以及串口通信接口电路[11-12]。在此,主要进行CAN通信接口电路、数据存储电路以及人机交互电路设计。
拖拉机导航控制系统要求能够实现节点控制平衡,无主从关系,摆正导航控制终端和转向控制器能够进行分布式控制[13]。因此,采用CAN总线通信的方式,保证各控制节点之间的数据有效传输。CAN总线主要包含控制器、收发器、MCU以及外围控制功能电路,如图3所示。
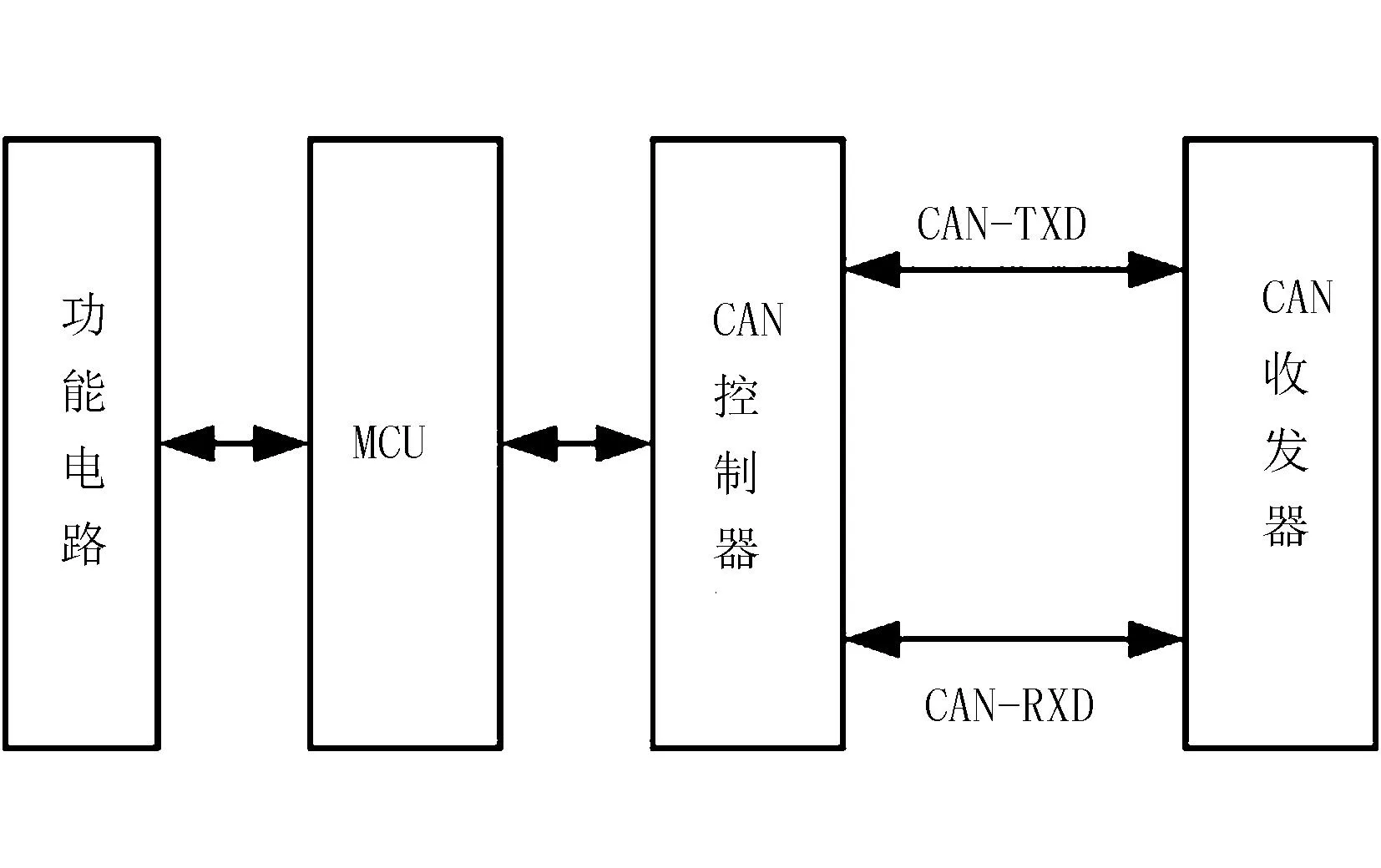
图3 农用拖拉机CAN总线硬件结构图Fig.3 Hardware structure diagram of agricultural tractor can bus
CAN通讯集成电路包含数据通信过程全部功能模块,能够对拖拉机作业过程中的数据信息进行滤波处理,在数据收发过程中包含收发缓冲和通讯接口逻辑判断,能够对数据信息流进行处理,收发缓冲过程中主要用于对信息数据进行临时存储。CAN通讯集成电路需要进行功能电路扩展,从而达到使用过程中的功能需求。拖拉机作业环境复杂,工作过程中易受到外界环境干扰,故CAN总线集成电路需包含收发隔离电路。本文选用CTM8251收发器,采用灌封工艺,适应不同工作环境需求,保证农用拖拉机作业过程中的通信有效性[14-15]。图4为CAN收发器集成电路。
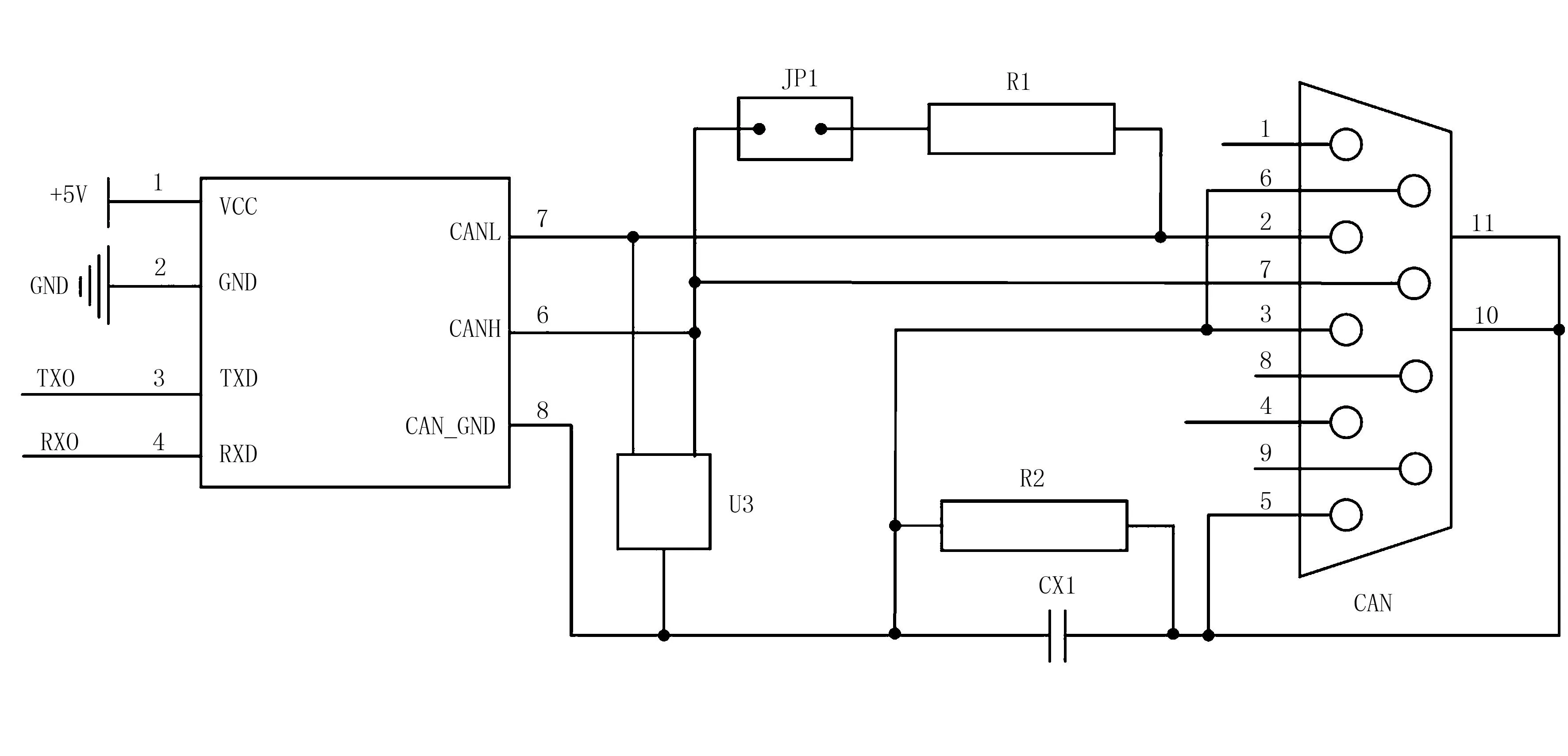
图4 CAN收发器集成电路Fig.4 Can transceiver integrated circuit
3 拖拉机导航控制系统软件设计
拖拉机导航控制终端软件要求能够与控制器之间进行有效数据传输,实现导航控制终端与转向控制模块之间的数据接收与传输,同时能够对转向过程状态进行实时监测,对过程数据进行提取与分析和显示;导航控制终端要求能够将相关数据信息进行可靠保存,并根据作业需求进行作业路径规划,将路径规划信息发送至控制器模块[16]。图5为农用拖拉机导航控制系统功能框图。
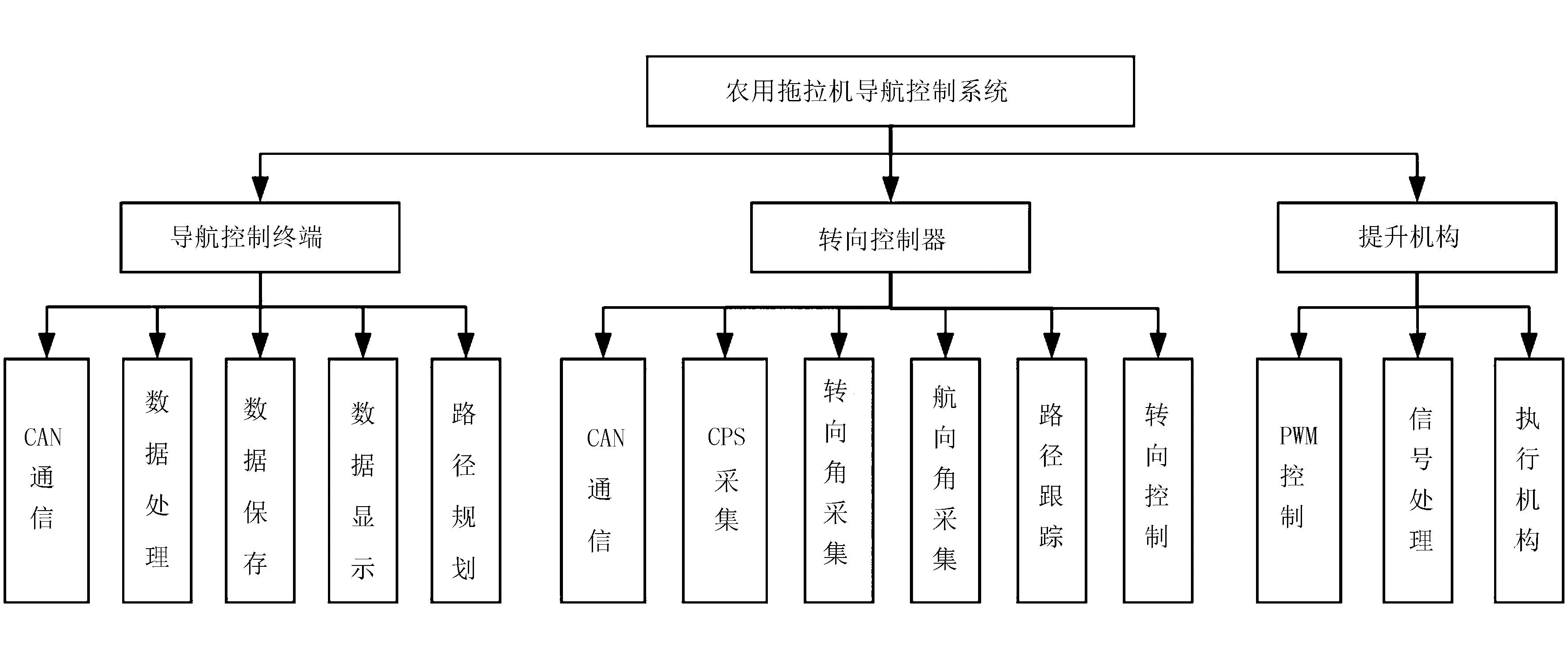
图5 农用拖拉机导航控制系统功能框图Fig.5 Functional block diagram of agricultural tractor navigation control system
拖拉机导航控制系统CAN总线进行数据传输过程中,能够将不同的节点信息进行同时发送,其他节点可同时进行数据的接收,并保证节点与上位机之间能够有效进行数据的发送与接收。为此,在设计实时数据交互软件过程中,通过将拖拉机运行数据进行节点共享,保证了节点机构之间的有效数据传输与共享。图6为农用拖拉机导航控制系统通讯节点分布图。
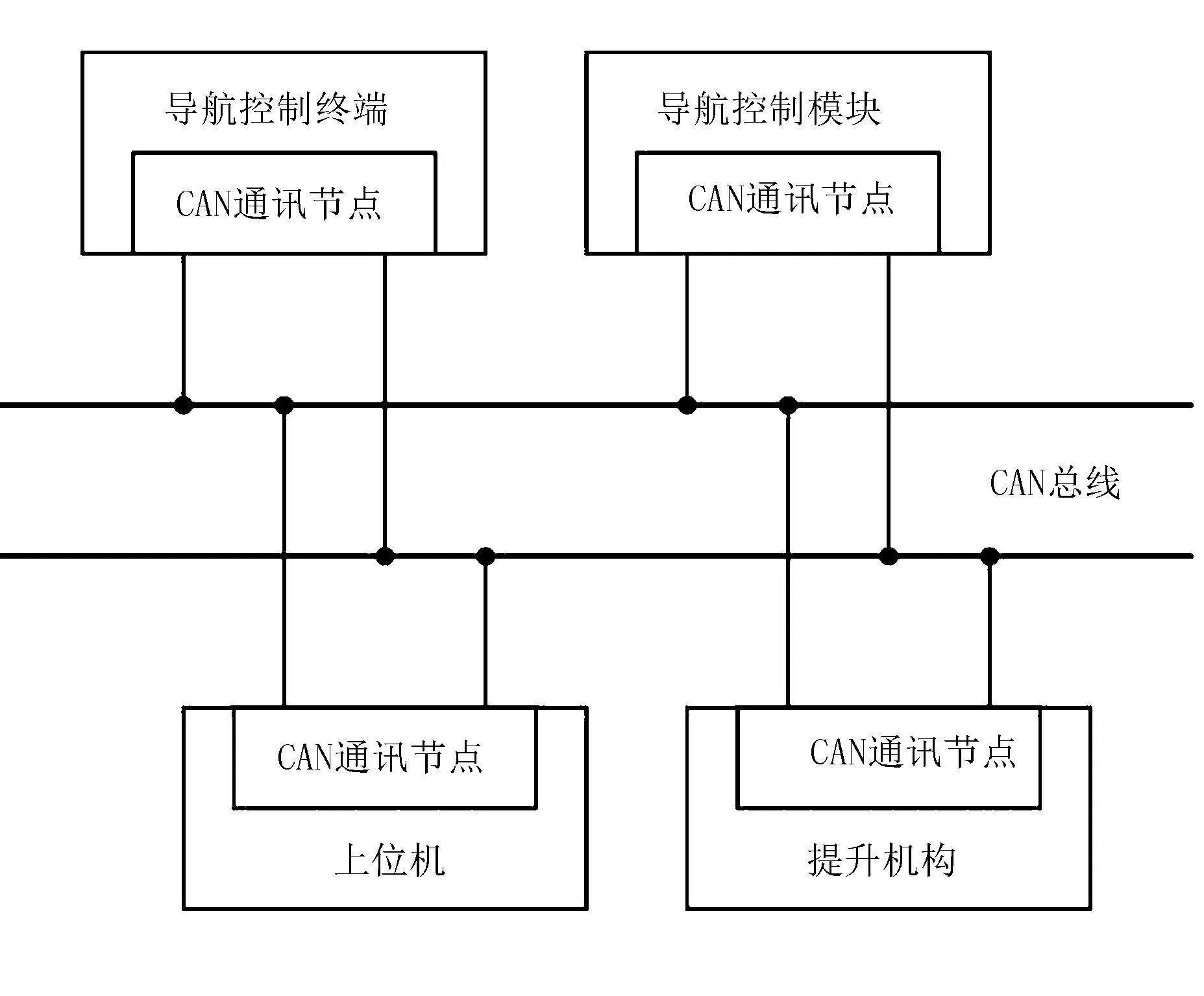
图6 导航控制系统通讯节点分布图Fig.6 Distribution diagram of communication nodes of navigation control system
4 系统测试与试验分析
为了验证拖拉机导航控制终端的控制响应性能,采用试验验证的方式,利用导航控制终端与导航控制器进行实时通信和拖拉机作业路径规划。拖拉机导航GPS和电子罗盘与转向控制器之间通过串口连接,将转型控制器与导航控制终端CAN通讯总线连接,运行导航控制终端,控制农用拖拉机从A点运动至B点,记录农用拖拉机运行过程中的GPS实时数据。在路径规划过程中,为避免数据误差,将100组实时记录数据进行平均,对拖拉机的GPS数据进行转化,生成A点至B点运行过程的坐标值。图7为利用GPS转换数据拟合出的运行路径。
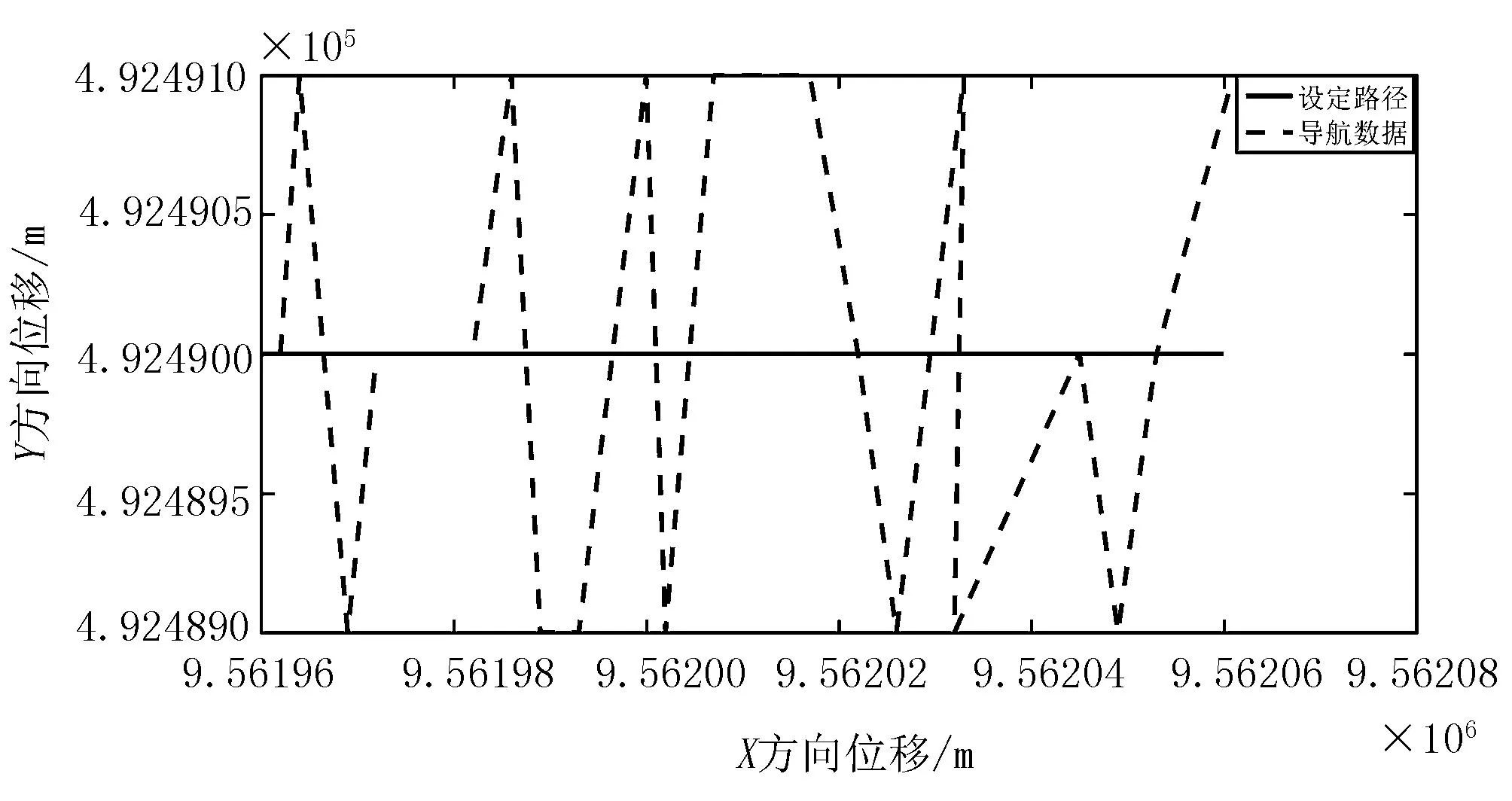
图7 农用拖拉机运行路径对比曲线Fig.7 Comparison curve of running path of agricultural tractor
由图7可以看出:拖拉机运行过程中, 利用GPS获取到的数据转换所得坐标值,X方向与理论路径偏差值为1m,Y方向产生2m偏差,拖拉机实际运行距离为99.02m,与理论规划路径总偏差值为0.98m,运行距离误差比例为0.98%,运行方向偏差1.16°。
5 结论
拖拉机导航控制系统能够有效保证农业生产过程的精准化作业,不断提升农业生产种植效率,使粗放型农业生产种植逐渐转向精细化种植。
猜你喜欢
小学生学习指导(小军迷联盟)(2021年11期)2022-01-18
湖北农机化(2020年4期)2020-07-24
测控技术(2018年6期)2018-11-25
测控技术(2018年8期)2018-11-25
小学生导刊(2017年15期)2017-05-17
小布老虎(2016年12期)2016-12-01
新农业(2016年21期)2016-08-16
水利科技与经济(2016年3期)2016-04-22
电子设计工程(2015年8期)2015-02-27
山东农机化(2015年6期)2015-01-03