感应电动机中三相不对称绕组
2024-01-09 07:18陈世元
同济大学学报(自然科学版) 2024年1期
陈世元, 陈 栋
(1.华南理工大学 电力学院,广东 广州 510640;2.好未来教育集团广州分校,广东 广州 510623)
感应电动机时常出现三相绕组不对称的情况,如:大型电动机在运行中个别线圈出现短路故障,摘除故障线圈继续运行,造成三相绕组不对称[1-2];中小型双速电动机在变极后,绕组有时也会出现三相绕组不对称情况[3];为了通用定子冲片,减小齿槽转矩,采用分母为3 的分数槽绕组而出现三相绕组不对称情况[4-7];永磁直线感应电动机的边端效应引起定子三相绕组自感和互感系数的不对称[8-9]。
针对三相不对称绕组,许多学者进行了研究。李明阳等[6]、汤蕴璆等[10]、尹家骥等[11]、乔桂红等[12]进行了三相不对称绕组的谐波分析,发现其谐波含量要比对称绕组的多。李建久等[13]、唐守杰等[14]建立了三相不对称绕组的等效电路,由于计算复杂,因此采用计算机完成计算。吴新振等[15]采用矩阵方法分析三相不对称绕组,虽然将电压方程由三阶降为二阶,但是由于不能解耦,导致计算繁琐。戈宝军等[16-17]、陆海玲等[18]分析了电动机不对称运行时的特性和瞬态。
对于电动机绕组对称、电压不对称的运行情况,采用对称分量法可以使电压方程解耦,计算得到简化[19-20]。然而,采用对称分量法分析三相不对称绕组时[21-23],电压方程不能解耦。陈世元[24]对文献[21]中的电压方程采用磁动势分量变换分析,虽然变换后的电压方程对角线元素明显占优,但是仍然不能解耦。本研究对文献[21]中的电压方程进行分析,建立新的电压方程,并采用文献[24]中的磁动势分量变换使电压方程解耦。
1 对称绕组的电压方程
众所周知,对称绕组外加不对称电压运行时,可采用对称分量法分析,电压方程为
还可以写成[3]
式中:ZS为相绕组本身电阻和等效漏电抗构成的阻抗;ZAA、ZBB、ZCC为相绕组本身电阻和自漏电抗构成的阻抗,ZAB、ZBA、ZAC、ZCA、ZBC、ZCB为相绕组间互漏电抗构成的阻抗。式(5)中,等号右边第一项为正、负序旋转磁场引起的感应电动势,零序电流不产生旋转磁场,因此不在定子绕组中产生感应电动势;等号右边第二项为定子边漏阻抗压降。电动机的正、负序旋转磁动势分别与正、负序电流成正比,而电动机的正、负序旋转磁通分别与(Z+-ZS)、(Z+-ZS)成正比。将̇ 按式(3)转换成̇,相加后得到
对比式(4)和式(6)可得出
虽然ZS和Z0都具有漏阻抗性质,但是又有所不同。ZS为每相的等效参数,与绕组坐标无关,只与绕组匝数和相对夹角有关;Z0为实际参数,除了与绕组匝数和相对夹角有关外,还与绕组的坐标有关。
2 不对称绕组的电压方程
定子绕组的不对称形式是多种多样的,但无论哪一种形式,都可以由三相槽矢量表示成一个统一的一般不对称绕组表达式[24],如下所示:
式中:TA、TB、TC为向量,其中TA为参考向量,幅值为1;k、h分别为TB、TC的幅值与参考向量TA幅值的比值,也是有效串联匝数的比值;γ、β分别为TB、TC在其对称位置上的偏移角。k、h、γ、β取不同值时,就表示各种特殊形式的一般不对称绕组。一般不对称绕组的三相槽矢量如图1 所示,坐标原点选择在A相绕组轴线上。

图1 三相槽矢量图Fig.1 Slot vector diagram of three phases
转子是对称的,正、反转磁动势各自在转子绕组中感应出一组对称的电势,因此三相定子感应电势加上定子漏阻抗压降与电源电压相平衡。参照式(5),一般不对称绕组的电压方程可写成
式中:*表示共轭和为磁动势分量电流[24]。磁动势分量电流计算式为
对于一般不对称绕组,式(7)中的Zs项应为[24]
式(7)的Z0项可根据文献[25]中的定义来确定。对一般不对称绕组,三相绕组的绕组函数[25]可以表示为
式中:Ns为每相绕组有效匝数;ϕ为从相绕组轴线算起的空间角度。令ϕ=0,则有
NA、NB、NC可看作为各项绕组相对于坐标原点的有效匝数。根据文献[25]中的定义,自感漏抗的Z0项应与本相的有效匝数的平方成正比,互感漏抗的Z0项应与相关两相的有效匝数乘积成正比,即:
将式(11)和式(15)相加,式(12)和式(16)相加,再利用三角函数的和差化积公式、欧拉公式,可得
由于绕组电阻相对于漏抗甚小,因此可以认为漏抗近似等于阻抗。将式(10)、式(17)和式(18)代入式(9),得到一般不对称绕组的电压方程,如下所示:
当三相绕组对称时,即k=1,h=1,γ=0,β=0时,式(19)可转变成式(4)。当三相绕组为镜像不对称时,即h=k,β=-γ时式(19)可转变成下式:
3 磁动势分量变换后的电压方程
根据文献[24],磁动势分量变换式为
当绕组对称时,即k=1,h=1,γ=0,β=0 时,式(21)、式(22)、式(23)和式(10)变成对称分量。
对于镜像不对称绕组,将H=K*,H*=K代入式(21)、式(22)、式(23)和式(10),可得
逆变换为
将式(21)和式(22)代入式(19),进行磁动势分量变换,可得
由此可见,对于具有一般不对称绕组的三相电动机,经过磁动势分量变换后,阻抗矩阵将转化为对角线矩阵,而其中元素是对称时的序阻抗,不必重新计算。正序、负序和零序3个电压方程互相独立(解耦),各序电压仅产生该序电流,因此各序可以单独求解,使求解过程简化。于是
或
计算出̇后,从式(22)即可求出各相的实际电流。
对于镜像不对称绕组,将式(24)和式(25)代入式(20),同样可得式(28),再由式(25)求出各相的实际电流。
4 实验验证
为了进行不对称绕组的电动机实验,需要对电动机进行重绕。为了节省经费,特选一台报废的JO2-41-4 型感应电动机作为被测电动机。重绕后的电动机数据如下:额定电压为380 V,额定功率为3.3 kW,额定电流为6.9 A,额定频率为50 Hz,额定转速为1 430 r·min-1,额定转差率为0.046 5,绕组节距取1~9。
实验电路如图2 所示,主要实验设备如表1 所示,主要实验仪表如表2所示。
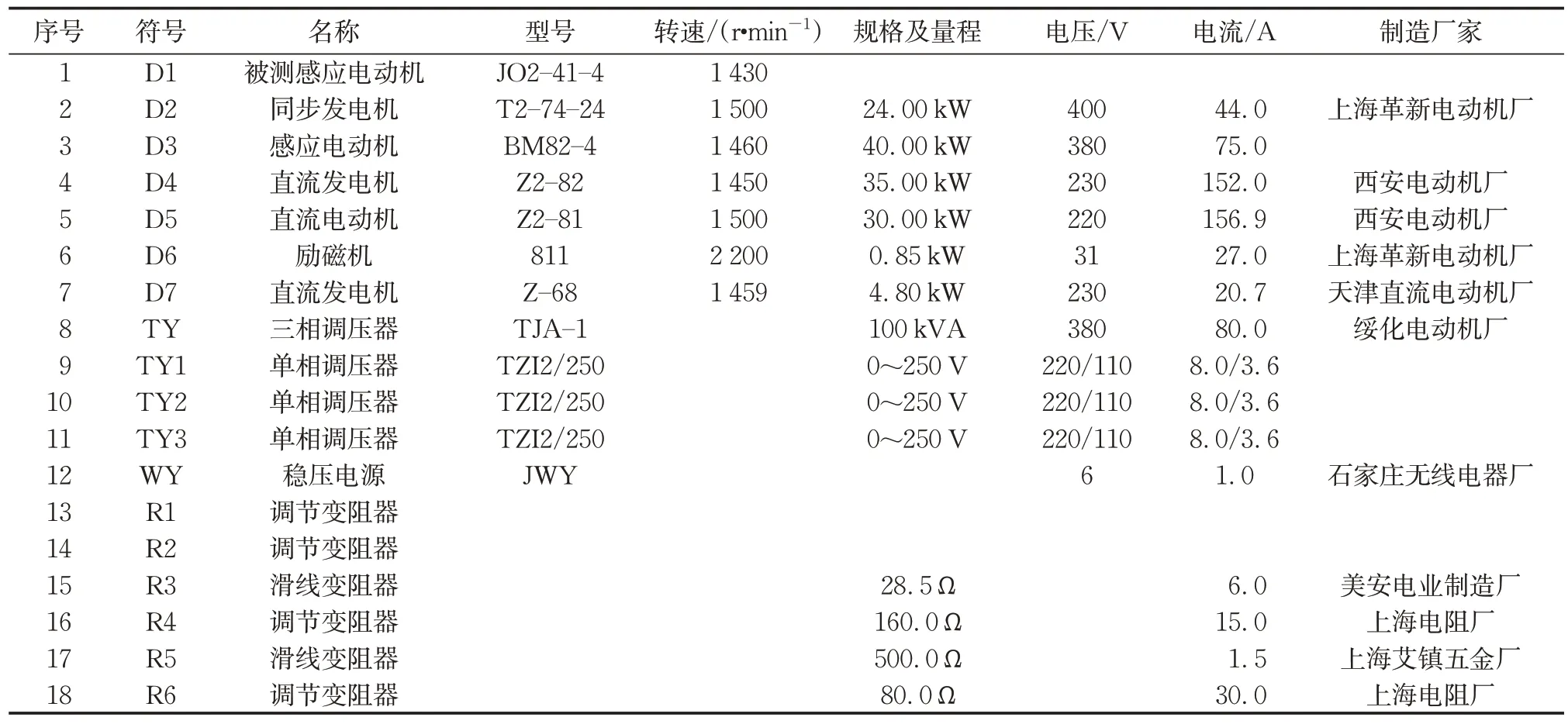
表1 主要实验设备Tab.1 Main experiment instruments

表2 主要实验仪表Tab.2 Main experiment meter

图2 实验电路Fig.2 Experiment circuit
图2 中,电动机D2—D6 构成稳频发电机组,作为实验电源。通过变阻器R1、R2 和R3 调节直流电动机D5 的转速来控制同步发电机D2 的频率,其频率为(50.0±0.1) Hz。变阻器R4 用来调节同步发电机D2的励磁,控制同步发电机D2的端电压,三相电压不平衡度不超过±0.4%。JL、CG、SP 和WY构成转差检测系统,用来检测被测感应电动机D1的转差率。直流发电机D7 作为被测感应电动机的负载,通过变阻器R5 调节D7 的端电压,通过变阻器R6 调节D7 的功率,即调节D1 的负载。电流表A1、A2和A3用来检测D1的三相电流,电压表V1、V2和V3用来检测D1的三相电压,电压表V4、V5和V6用来检测D1的三相线电压。
将被测感应电动机D1 的绕组绕成三相对称绕组,在室温23 ℃时测得的定子三相电阻分别为1.794 、1.780、1.789 Ω。首先进行空载实验,空载电流的不平衡度不超过±1.5%,三相电压不平衡度不超过±0.4%,然后进行负载实验。额定转差率时测得的各序阻抗为
将B、C两相拆去一部分线圈,构成不对称绕组,不对称参数为k=0.918 9,h=0.838 9,γ=-1.851 9°,β=-4.059 6°。
实验时,首先合上开关K2 并观察电流表A4 和电压表V10,再调节调压器TY并观察电压表V9,将电压调节到电动机D3 的额定电压。用滑线变阻器R1 将直流发电机D4 的端电压调节到额定电压,再通过变阻器R2 和R3 将直流电动机D5 的转速调节到同步转速1 500 r·min-1,使週率表HZ 的读数为50 Hz。由变阻器R4 调节励磁机D6 提供的励磁电流,从而将同步发电机D2 的端电压调节到额定电压。合上开关K1,由单相调压器TY1、TY2 和TY3将电压调节为不对称电压。由滑线变阻器R1 将直流发电机D7 的端电压调节到额定电压。合上开关K3,通过变阻器R6,将被测感应电动机的负载调节到某个实验点。合上开关K4,接通检测电源。每个实验点都要通过调节变阻器R1、R2 和R3 使得同步发电机D2的频率为50 Hz,端电压为额定电压时,读取各仪表的读数并记录。
不同负载时三相电流计算数据与实测数据的对比如表3所示。由表3可见,计算数据与实测数据的相对误差不超过6%,从而验证了该计算方法的可行性。

表3 各相电流的计算数据与实测数据Tab.3 Calculation data and experiment data of each phase current
5 结论
(1) 建立了采用对称绕组序阻抗表达的三相不对称绕组电压方程。
(2) 对于三相不对称绕组电压方程,采用磁动势分量进行坐标变换后方程解耦,阻抗矩阵简化为对角线阵,方便计算。计算时采用对称时的序阻抗。
(3) 计算数据与实测数据的相对误差不超过6%,可见提出的计算方法是可行的。
作者贡献声明:
陈世元:理论分析和研究。
陈 栋:数学公式推导。
猜你喜欢
北京交通大学学报(2022年2期)2022-06-24
中学生数理化·中考版(2022年11期)2022-02-16
陕西理工大学学报(自然科学版)(2020年4期)2020-08-20
哈尔滨铁道科技(2020年4期)2020-07-22
中学生数理化·中考版(2019年10期)2019-11-25
电气技术(2016年3期)2016-10-14
电测与仪表(2015年12期)2015-04-09
学生之友·最作文(2014年5期)2014-07-09
电测与仪表(2014年14期)2014-04-04
电测与仪表(2014年2期)2014-04-04